光学条码位移传感器系统的设计
2017-09-28 07:23:07那启跃王志兴
组合机床与自动化加工技术 2017年9期
那启跃,冯 波,王志兴
(南京理工大学 理学院,南京 210094)
光学条码位移传感器系统的设计
那启跃,冯 波,王志兴
(南京理工大学 理学院,南京 210094)
在分析了数控机床线位移反馈装置的基础上,提出了一种光学条码位移传感器。由于单轨绝对编码技术的制约,光栅尺的编码长度难以扩展。为了实现大量程编码,基于光学条码定位技术的研究,设计了一种新型的高精度大量程绝对条码尺。介绍了多周期等间隔条码的编码方案和解码方法,对条码尺的量程扩展进行了可行性分析。利用专用嵌入式系统和相关器件实现了条码位移传感器系统的设计,并给出了实际测量结果。实验数据表明,该传感器系统的分辨率可以达到1μm,精度为±5μm,最大测量长度可达2m。
绝对光栅尺;条码尺;绝对位移
0 引言
在现代数控机床自动加工行业,通常使用电脑控制精密电移平台进行精确位移,其测量系统中直线位移传感器是必不可少的部件。直线光栅尺作为数控机床中最具代表性的线位移反馈元件,根据功能可以分为增量式光栅尺和绝对式光栅尺。随着对测量要求的提高,绝对式光栅尺正在逐步取代增量式光栅尺。相对于增量式光栅尺,绝对式光栅尺在机器设备通电的同时就可以直接得到当前位置信息,不再需要开机后寻找参考零点这一“归零”过程,简化了控制系统的设计。
绝对式光栅尺虽然能够采集到绝对位置信息,但由于采用单轨道编码技术,需要在1m范围内排列百万个无重复位置编码[1],数据量庞大,需要专用的数字信号处理芯片来完成大量的图像处理运算,这就造成绝对尺的昂贵,不能够广泛应用于自动化控制行业。目前,我国国内部分研究所、高校以及企业开展了绝对式光栅尺的研发工作。其中中国科学院长春光学精密机械与物理研究所研制的绝对式光栅尺样机性能最为优越,测量精度±3μm,绝对定位误差0.12μm。但由于单轨道编码技术难以突破,光栅尺最大测量长度只能止步于1200mm[2]。
因此,本文基于光学条码定位技术[3]设计了一种新型实用、成本低廉的大量程条码尺,以期实现与光栅尺相结合共同对位置信息进行精确测量。设计的传感器系统使用条形码对位置信息进行有效标定,采用图像传感器来获取条码所表示的绝对位置[4],即通过CCD图像传感器记录采集条码图像的像素灰度值的变化[5]。以条码尺为基础,设计出了与之匹配的位移传感器,该传感器具有体积小、重量轻、结构简单、测量精度高、制作成本低廉等优点。在一定情况下可以替代部分光栅尺,为实现高精度绝对位移测量光栅尺提供了有效途径,为位移测量领域提供了一种新型位移传感器。
1 条码定位测量原理
1.1 光学三周期等间隔条码编码原理
条码尺使用多周期等间隔条码编码[6]方案,条码图案如图1所示,具体如下:
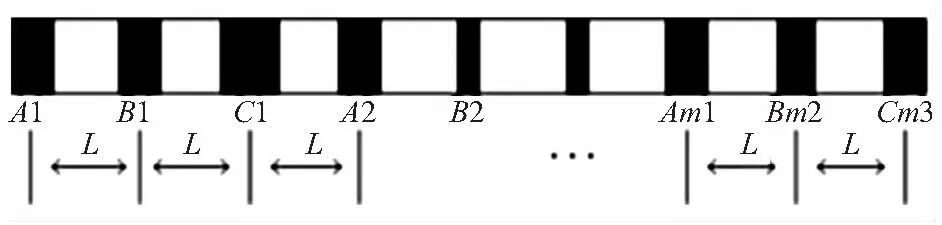
图1 光学条码示意图
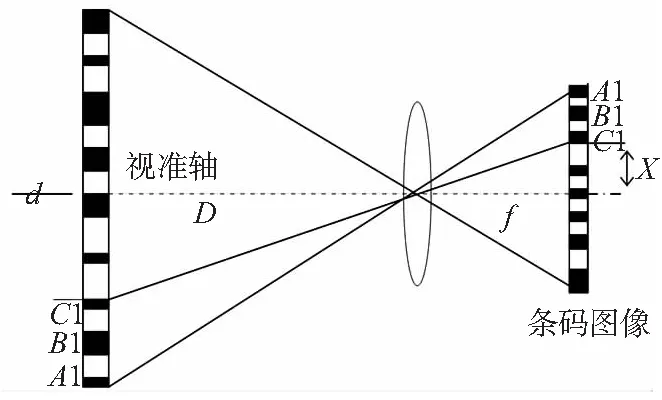
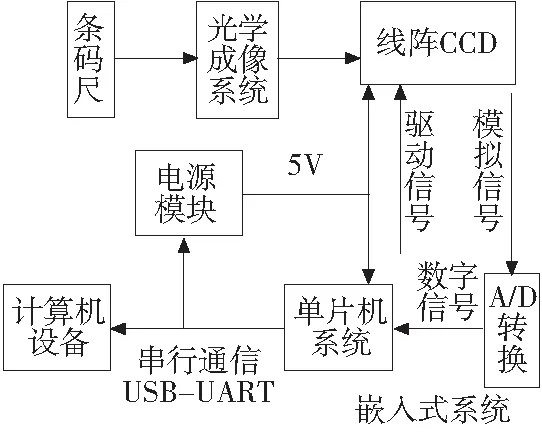
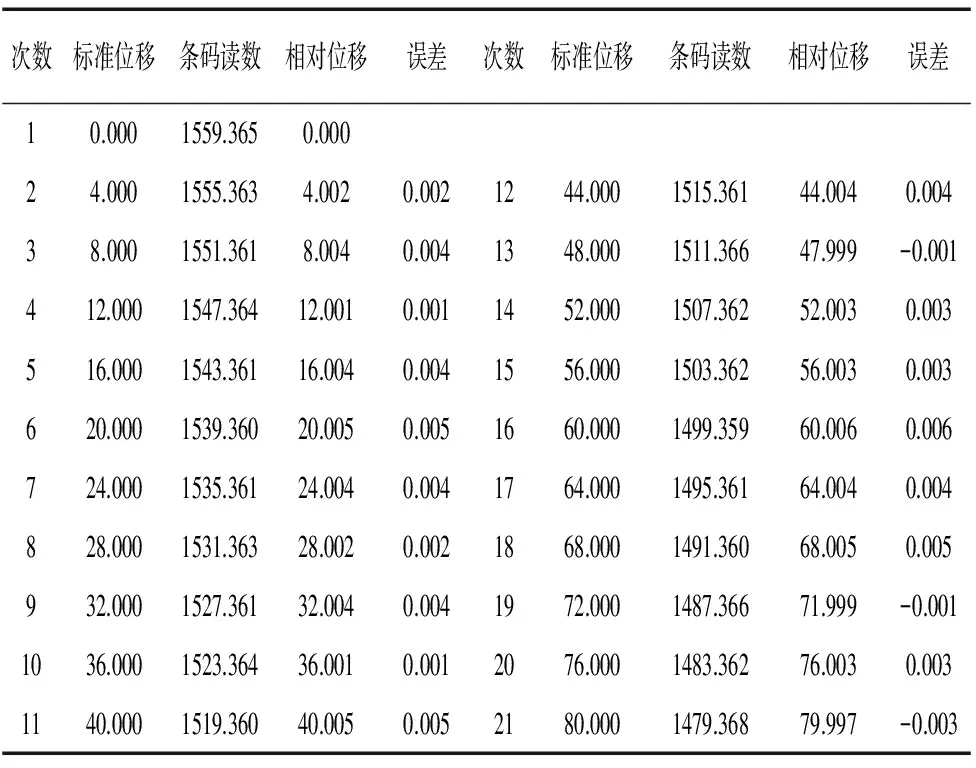
(1) 建立自定义正小数集合K=(k1,k2,k3,…ki,…kn),其中n为自然数,集合中的元素ki(ki-1 (2)以三周期组合码为例,在集合K中选取三组子集,分别记作: A=(A1,A2,A3,…Am1),Ai∈K; 其中,A≠B≠C。 (3)依次从子集A,B,C中按各自的元素在m1,m2,m3中的排列顺序分别选取一个码元并相隔距离L(L>ki)排列,组成条码的一个码字,从而生成三周期等间距的条码尺。按照这种组合方式,可以算出得到的最大互不相同的码字个数为这三个子集元素个数的最小公倍数(即码字的最大序号),而每个码字表示着条码尺的不同位置信息。 举例说明:在设计中,取m1=4,m2=5,m3=7,则可以组成4×5×7=140个码字。如表1所示,第一个码字为(A1,B1,C1),第二个码字为(A2,B2,C2),依次类推,第140个码字为(A4,B5,C7)。每个码字的宽度标定为13.5mm(条码码元间距L设置为4.5mm,一个码字由3个码元组成),此编码方案组成的条码尺总长度可达140×13.5mm=1890mm。 表1 周期组合码排列示意图 根据组合码周期数(如三周期、四周期组合码等)以及各子集码元数(m1,m2,m3,…mn的值) 的选取,可以组合成不同长度的条码尺,并且不会产生累积误差[7]。依据本文编码理论,对于n周期组合码,码元间隔为L,单个码字长度为n×L,设各组子集码元数分别为m1,m2,m3,…mn,则可以计算出条码尺总长度为m1×m2×…×mn×n×L。 1.2 光学等间隔条码解码原理 条码成像光路系统如图2所示,目标条码成像在CCD(Charge-coupled Device,电荷耦合器件)中心位置附近,根据其成像条码各码元的宽度值确定其在各自集合(子集A,B,C)中的排列序号,利用“中国余数定理”[8]计算出目标条码的码字序号,此码字序号对应的条码尺位置为码字序号与码字宽度3L的乘积,作为测量初值d1;根据此码字中第三个码元在CCD上成像的像素位置进行图像处理,解算出CCD成像中心到该码元的像元距离x,最终得到精确位置d=d1+βx,其中β=D/f为光学系统的放大倍数。以本文设计的三周期组合码为例,若在CCD中心位置附近观测到三条码元A2、B3、C1,组成的码字为(A2,B3,C1),根据其码元序号2、3、1,利用中国余数定理可求得组成的码字的序号为78,则对应的条码尺位置应为78×13.5mm=1053mm处。 图2 光学系统示意图 2.1 条码位移传感器测量原理 传感器系统由条码尺、光学系统、CCD图像传感器、嵌入式系统、电源模块及通信接口组成,如图3所示。条码尺表面黑白相间的条码图像通过光学系统在线阵CCD上成像、视频信号经A/D(模/数)转换器,将条码数字图像信号送至微处理器,对图像信号进行亚像素边缘检测处理[9],经解码,计算出当前的高精度绝对位置量,通过通信接口输出或显示。 图3 位移传感器系统框图 2.2 电路系统模块设计 为满足条码定位系统主控单元高实时性、快速处理、低功耗的要求,本系统选用ARM嵌入式系统[10]的方案,其优点是既能采集图像信息,又能对图像信息进行识别,不需要增加负责图像信息识别的芯片。同时,该方案还具有成本低、功耗低、结构简单、扩展性强等优点。 条码定位系统是在传统的光学光路中增加了图像传感器,采用图像采集与识别系统,对条码尺进行读数并显示,从而实现了光机电测量的一体化。在图像采集与识别模块中,主要应用了LPC2136处理器和TCD1254GFG线阵CCD。 LPC2136处理器是一款高性能、低功耗的32位RISC(Reduced Instruction Set Computer,精简指令集计算机)芯片,主要作用是为CCD提供驱动信号、完成A/D转换和对采集的图像信息进行处理分析等。 CCD图像传感器TCD1254GFG[11]有效像元数为2500,像元尺寸为5.25μm×6.4μm,采用低暗电流、高灵敏度的PN结作为感光单元,自带电子快门和采样保持电路。其光谱响应区间在400nm~1100nm,峰值波长为550nm,满足可见光照明条件,尤其是对绿光最为敏感。 位移测量检验装置由条码位移传感器、条码尺、双频激光干涉仪、导轨平台组成。条码尺固定不动,传感器和双频激光干涉仪动镜紧密相连并固定在导轨滑块上,用步进电机带动滚珠丝杆作用滑块沿导轨作直线移动,如图4所示。 图4 实验测量装置示意图 按照图4所示的测量装置,移动滑块使双频激光干涉仪标准位移量每次变化4.000mm,记录条码传感器测量值。移动20次,传感器测试20组数据,总位移量为80.000mm。测量结果如表2所示,传感器的分辨率为0.001mm,测量误差不随位移的增加而增大(或减小),测量误差如图5所示,在测量范围内误差在-0.003mm~0.006mm之间,条码位移传感器的精度可以标注为±0.005mm。 实验数据表明,光学条码定位位移传感器的分辨率为1μm,实验结果基本体现了编解码算法的可行性和稳定性,具有较高的数据处理精度;准确度±5μm指标基本体现了条码尺制作工艺(高精度光绘机光绘)达到了较好的加工精度;总体测量精度达到了千分尺的测量精度。大量程(本设计条码码字周期为1890mm,可以采用多种方法进行量程扩展)、远距离(条码尺和传感器相隔的间距可以在0~100m范围内,用不同的成像镜头来选择)测量是传感器的两大优点。运用条码定位测量,使得位移测量方式更加灵活,具有广阔的应用前景。 表2 条码位移传感器测量数据(单位:mm) (1)电子水准测量系统,将条码尺制成条码标尺,把传感器安装在水准仪成像位置,实现数字化水准测量; 图5 条码位移传感器测量误差 (2)将卷尺、皮尺印刷成条码尺,将传感器安装在尺子的结构中,实现大量程数字化测量; (3)替代光栅尺,实现大量程绝对位移测量,提高产品性能; (4)实现高端光栅尺升级,充分利用各自的优点,制作成高精度绝对位移光栅尺,目前是国家重点资助专项。 在对条码定位技术研究的基础上,提出了光学三周期等间隔条码编解码原理。通过位移测量检测装置的实验结果可以看出,条码位移传感器系统具有高精度、高分辨率的特点。该传感器采用模块化设计理念,各功能模块分工合作,便于以后产品的更新与升级。条码位移传感器还具有体积小、重量轻、成本低、寿命长等工程特性,为工程应用提供了可能。 [1] 范朝龙,王晗,刘强,等.精密绝对光栅尺的编码采集系统研究[J].组合机床与自动化加工技术,2014(11):78-82. [2] 孙强. 高精度绝对式光栅尺研究进展及技术难点[J]. 世界制造技术与装备市场,2012(5):72-73. [3] 张晓,李相银,王志兴.光学成像条码定位理论研究与应用[D].南京:南京理工大学,2006. [4] Wan Qiuhua, Wang Yuanyuan, Sun Ying, et al. A novel miniature absolute metal rotary encoder based on single-track periodic gray code[C].USA:IEEE Computer Society, 2012: 399-402. [5] Hsu C C, Lu M C, Wang W Y, et al. Distance measurement based on pixel variation of CCD images[J]. ISA Transactions, 2009, 48(4): 389-395. [6] 王志兴,薛明忠.大范围距离变化条件下“光学成像条码”的准确定位编解码软件[P].中国专利: 2010SR002773,2005-06-18. [7] 许杰,杨硕,王明辉.基于无累积误差滤波的数字稳像算法[J].计算机应用研究,2014,31(7):2213-2215. [8] 陈景润.初等数论[M].北京:科学出版社,1978. [9] 林琦,俞水良.沿梯度方向的改进一阶差分亚像素边缘检测法[J].计算机工程与应用,2014,50(14):168-171. [10] 周立功.ARM嵌入式系统基础教程[M]. 北京:北京航空航天大学出版社,2005. (编辑李秀敏) TheDesignofOpticalBarCodeDisplacementSensorSystem NA Qi-yue, FENG Bo, WANG Zhi-xing (School of Science, Nanjing University of Science and Technology, Nanjing 210094, China) Based on the analysis of the linear displacement feedback device of the numerical control machine tool, an optical bar code displacement sensor was proposed. Due to the restriction of single absolute encoding technology, it is difficult to extend the length of the encoder. In order to achieve a large range of coder, a new type of high-precision and large-range absolute bar code was designed based on the research of optical bar code positioning technology. In this paper, the coding scheme and decoding calculation method of multi period and equal interval bar codes are introduced, the scale expansion of bar code is carried out. The design of the sensor measurement system is realized by using the special embedded microcontroller and related devices. Though experiment, the actual measurement results are given. Experimental data show that the resolution of the displacement sensor system is 1μm, and the accuracy is±5μm. The maximum measurement length of bar code is 2m. absolute grating ruler; bar code; absolute displacement TH165;TG506 :A 1001-2265(2017)09-0016-03 10.13462/j.cnki.mmtamt.2017.09.005 2016-10-28; :2016-11-29 那启跃(1992—),男,江苏徐州人,南京理工大学硕士研究生,研究方向为光电检测与仪器仪表测量等研究,(E-mail)247557812@qq.com;通讯作者:冯波(1979—),男,南京人,南京理工大学讲师,研究方向为测试计量技术与仪器方面,(E-mail)anchoretf@njust.edu.cn。
B=(B1,B2,B3,…Bm2),Bi∈K;
C=(C1,C2,C3,…Cm3),Ci∈K;
2 条码位移传感器系统设计
3 条码位移传感器检验装置

4 实验结果
5 基本应用

6 结论
猜你喜欢
工程与试验(2022年2期)2022-08-08 12:37:30
雷达与对抗(2020年2期)2020-12-25 02:09:26
商品与质量(2020年53期)2020-11-27 03:07:42
扬子江诗刊(2018年1期)2018-11-13 12:23:04
舰船电子对抗(2018年3期)2018-08-28 02:02:56
精密制造与自动化(2018年1期)2018-04-12 07:42:52
扬子江(2018年1期)2018-01-26 02:04:06
无线电通信技术(2016年6期)2016-12-20 03:08:13
机电产品开发与创新(2014年6期)2014-03-11 16:42:57
河北大学学报(自然科学版)(2013年4期)2013-10-28 07:05:39