
岸桥电气驱动和控制系统的基本方式及特点分析
2017-09-28 07:31顾晓海
中国设备工程 2017年18期
顾晓海
(上海振华重工(集团)股份有限公司,上海 200125)
岸桥电气驱动和控制系统的基本方式及特点分析
顾晓海
(上海振华重工(集团)股份有限公司,上海 200125)
现代岸边集装箱起重机的电气驱动以及控制系统是现阶段的重点研究方向之一。我们通过岸桥的发展特点来进行统计和研究,对岸桥的交流驱动及直流驱动这两种方式分析比较其各自的优缺点,而后确定选择哪一种岸桥驱动系统的方式最适合。同时对岸桥系统的基本驱动原理进行详细的探索和研究,并且找出一定的规律。
岸桥电气驱动;控制系统;基本方式及特点
在岸桥的设计前期,我们首先需要确定电气驱动方案。在进行方案实施的过程中,要确定所驱动的对象负载有多大,并且确定负载的基本特点。在岸桥的一般运行中,负载的基本特点可以确定为:起重机的起升机构是一个位能性质的负载量,在起重量不改变的情况下,无论多大的转速,负载的转矩保持不变,并且这一负载的方向也是与转矩方向相似,它不随着电机转速的方向改变而改变。在集装箱的起重机日常工作中,有一半的时间是空载运行。根据这一特点,起重机即使是带载运行,也需要在一定的工作制(如S1)下按照循环功率运行。因此,在日常工作时,为了可以有效的提高工作的效率,可以在空载的时候加快起重机的工作速度。
1 直流驱动与交流驱动的分析
1.1 直流驱动与交流驱动比较
针对于岸桥式的起重机我们需要对其驱动进行分析和比较,也就是对直流驱动和交流驱动这两种方式进行系统、详细以及全面的分析和研究。在上个世纪的八九十年代时,岸桥一般都是采用直流驱动的方式来运行。这种直流驱动方式的优点,可以分析为:第一,直流驱动调节速率的能力比较好,相对来说比较容易实现电压的调节;第二,在启动的时候转矩比较大,在基本动态情况下响应非常好,有非常好的启停制动特性;第三,在起重机下降的时候,能够更好的将转变完成的电能及时反馈到电网之中,并且整体的系统效率高,在一定程度上可以节约资源。其缺点:第一点是最为重要的,即直流电机比交流电机的结构复杂,价格较高,不适合长期使用,并且其维护工作难度大、工作量大;第二点就是直流电机会直接或间接造成其力矩变大,使其功率不自然。
1.2 交流驱动系统
驱动系统如图1所示。
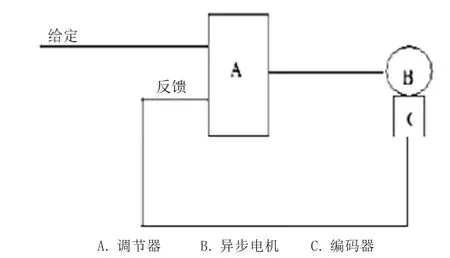
图1 交流驱动系统示意图
在岸桥运行的时候,交流驱动装置在启动的时候最主要的执行机构是交流的电机,即交流异步电机。在运行之前,交流异步电机在其制作完成之后的基本特性就已经确定,其基本特征为:交流异步电机的输出转矩在运行的时候只跟滑差转速这一项有关。在设备进行空载运行时,电机的转速跟同步转速有着直接的关系,并且两者之间转速完全相同,在带载运行时,电机的转速会随着负载的不同,在闭环控制情况下自动调节。
2 岸桥对交流驱动系统要求
岸边集装箱起重机的结构形式有很多,但主要有单箱梁形式、双箱梁形式和桁架形式等。小车的驱动形式主要包括钢丝绳牵引式和自行驱动式两种常见形式。
在起重机中,对于重要的起升节点,恒功率控制是重要的环节。其实质是:在起重机工作时,额定负载的情况下,电机的转速为其额定转速;同时,在设备的负载逐渐减小的时候,电机的整体速度也在不断地调整。在起重机工作时,变频器能够通过闭环控制自动检测出其自身负载的转矩,并且根据其自身转矩的整体变化情况,使其保持恒功率输出。在起重机空载时,可以提高设备的速度,以提高整体的工作效率。
在设备运行的时候,无论是起升还是俯仰机构,都需要对势能和动能的转化作出反馈处理。一般情况下都是可以通过使用制动电阻的方式来进行能量的消耗,但是这一方法比较消耗资源,因此非理想的方法。另一种合理再利用的方式就是将能量直接反馈到电网之中。现阶段,可以将已存在的整流桥跟能量反馈组合起来,真正的实现能量的互通。
3 岸桥电气驱动和控制的基本特征
在现代起重机中,岸边集装箱起重机的电气驱动以及控制是重点研究技术,我们通过分析可以得知,其基本特征有很多,以下我们稍作介绍。
3.1 岸桥向更重、更高、更长、更快的方向发展
(1)岸桥的载荷要求(即起重量)越来越大,造成起重机的自身重量加大。但同时由于对码头基础承受力以及轮压等方面的要求,起重机的轻量化也是不可回避的要求。从设备或各机构的速度、加速度等方面改善驱动效果,是提高效率的有效途径。
(2)岸桥的起升高度会越来越高。轨上起升高度随着集装箱船舶的改进和增大而不断增加,而轨下起升高度也随着各码头的基础条件的改善和优化而不断增加。这样,岸桥在运行过程中能量的反馈显得尤为重要。
(3)岸桥的小车行程越来越长。由于集装箱运输船舶规模的增加,在起升机构的起升高度不断增加的同时,小车向海侧行程所要求达到的物理位置越来越远,即造成小车的总行程加大,并且相应的拖令或拖链系统的行程加大,对于电气驱动即要求更高效和稳定。
(4)岸桥的起升速度是相对比较稳定的参数,空载运行时一般达180米/分钟,额载运行时为90米/分钟。不同的加速度要求可以决定起升机构的加速功率,同时也是岸桥上驱动变压器和起升驱动器选型计算的重要依据。
(5)岸桥的小车速度也是比较稳定的参数,空载和额载运行时一般达240米/分钟即为较快的速度。而加速时间和加速度的要求,也是决定小车驱动器选型计算的重要因素。
一般要想达到以上的性能指标,要求电气驱动系统有着非常好的性能,其本质意义就是需要快速响应以及改善功率。
3.2 应该具有起升防下坠功能
在传统的起重机中,应当在正常运行的时候使其具备一种起升防止下落的功能。在起重机拉起重物的瞬间会有一个短暂的下降,在下降结束之后才会慢慢的升起。根据这一现象我们可以感觉到这一机构还是存在一定的弊端。在起重机提升重物的时候,我们可以适时的增加电动机的输出功率,增加功率之后会在下降的瞬间增加上升的动力。
3.3 半自动、全自动操作的实现
半自动操作是指除了吊具着箱后的开锁和闭锁操作,需要通过操作人员通过手动操作实现外,其它动作均可借助防摇系统、船型扫描系统等辅助系统的功能自动实现。而岸桥全自动化操作的实现更是现代化集装箱码头的趋势,借助辅助控制系统的协同工作,借助自动化系统的精确定位,实现无人干预的岸桥自动循环工作。这样就可以大大的降低司机的工作强度,更合理的分配劳动资源,同时提高工作精度、提高生产效率。实现半自动化或全自动化的操作,是现阶段起重机的重点研究方向之一。
4 结语
在进行分析和研究之后,根据岸桥的负载以及直流驱动和交流驱动的优缺点的比较,我们可以找到适合于现阶段的岸桥驱动系统,这一系统就是交流驱动系统。另外,本文重点介绍了岸桥电气驱动和控制的基本特征,通过分析和研究找到了适合于岸桥交流驱动控制方式的矢量控制,并且分析了今后的岸桥发展方向,为岸桥电气的发展提供了参考和借鉴。
[1]王超,孙琳,陈慧,刘中祥.基于MATLAB的起重机械起升电机调速方式的仿真研究[J]. 能源技术与管理,2016(01).
[2]蔡峰.ZPMC CHA110-Z系列变频器在岸边集装箱起重机中的应用[J]. 起重运输机械,2011(06).
[3]潘超,左健民,汪木兰. 基于前馈及反馈补偿的高性能直线伺服系统[J].系统仿真学报,2010(12).
[4]余凤豪,吕飞,张松涛,吉哲.永磁同步直线电机的数学模型分析[J].舰船电子工程,2010(09).
[5]王国彪,赖一楠,范大鹏,杨华勇,王时龙.新型精密传动机构设计与制造综述[J].中国机械工程,2010(16) .
[6]张明超,尹文生,朱煜. 永磁同步直线电机推力波动建模与抑制[J].清华大学学报(自然科学版),2010(08).
[7]赵瑞芹,田小涛.减小永磁同步伺服直线电机磁阻力的研究[J].煤矿机电,2010(04).
[8]宋玉,陈国鼎,马术文. 交流伺服进给系统数学模型研究及其仿真[J].机械, 2010(07).

TP273
:A
:1671-0711(2017)09(下)-0100-02
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
电机与控制学报(2022年6期)2022-07-15
宁夏电力(2022年1期)2022-04-29
中国特种设备安全(2022年1期)2022-04-26
防爆电机(2022年2期)2022-04-26
防爆电机(2021年5期)2021-11-04
中国特种设备安全(2019年7期)2019-09-10
电子制作(2018年8期)2018-06-26
电机与控制学报(2018年9期)2018-05-14
海峡科技与产业(2016年3期)2016-05-17
