一款模拟昆虫飞行方式的微小型扑翼机
2017-09-27 00:55:40,
单片机与嵌入式系统应用 2017年9期
,
(1.大连东软信息学院 电子工程系,大连 116023;2.中车大连电力牵引研发中心有限公司)
一款模拟昆虫飞行方式的微小型扑翼机
高照玲1,周浩尚2
(1.大连东软信息学院 电子工程系,大连 116023;2.中车大连电力牵引研发中心有限公司)
设计了一款模拟昆虫飞行方式的微小型扑翼机,仿照蜻蜓的两翼,直升机式尾翼,以STC15F2K60S2为主控芯片,应用主流无线模块来完成实现遥控仿生扑翼机的设计与制作,经过实际测试能够满足飞行要求。
STC15F2K60S2;小型仿生扑翼机;单片机;空气动力学
引 言
本文设计了一款模拟蜻蜓飞行的微小型扑翼机,以STC15F2K60S2为主控芯片,采用2.4 GHz无线通信模块,采用贴片8050三极管来驱动空心杯电机,直升机式尾翼采用地平线舵机来控制转弯及平衡。扑翼机骨架用细探杆构建,翅膀采用塑料材质,这样既能保证机身轻盈,又可以节约成本。
所谓扑翼机就是像鸟儿、蜻蜓、蝴蝶等生物一样能扑动翅膀飞行的一种飞行器,根据其外形可以分为仿鸟扑翼和仿昆虫扑翼。前者的扑翼扑动频率低,需要翅膀面积大,类似于各种鸟类的飞行;后者的扑翼扑动频率高,扑翼面积小。另外一点区别就是一般昆虫有两对翅膀,鸟有一对翅膀,从飞行的角度来说,昆虫第二翅膀的作用和鸟尾翼作用类似,除了用于飞行还可以调节方向。扑翼飞行都是上下跳动飞行,没有绝对的静止,悬停也是相对的。那么可以发现中间的几个关键参数,机身结构及重量、损耗能量、上升能量等决定了能不能起飞及持续飞行,而环境因素(如风力风向、气压、湿度等)也必须加以考虑。
1 扑翼飞行过程
一般情况下,昆虫在一个扑动周期内大体可分解为如下三个阶段。
(1)合拢和分开

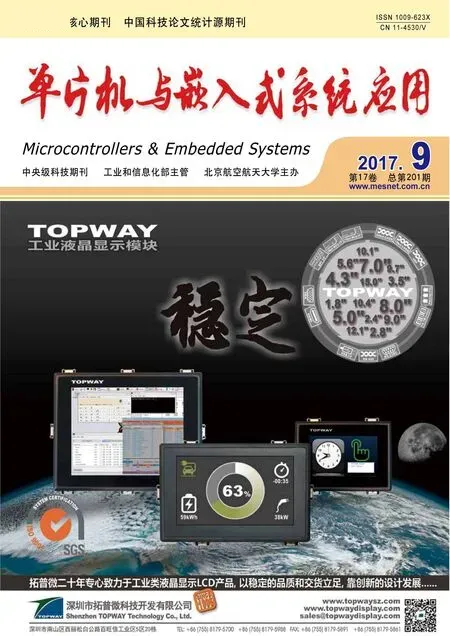
图1 翅膀打开合拢机制
1973年,丹麦科学家Torkel Weis-Fogh通过观察小黄蜂的飞行过程,在仔细研究了昆虫类生物振翅飞行资料的基础上,提出了Clap-Fling机理[1、4]。该机理可以通过图1进行直观化说明。拍动的初始阶段,昆虫两翅的前缘在顶点处合二为一,然后旋转两翅并从前缘处开始分开,此时两翅之间的夹角逐渐增大,空气的流入使得翅膀周围形成了两个漩涡,在双翅的上表面产生空气环流。当两个翅膀张开到一定角度时,两翅再度分开,进行各自平动,使得下拍产生更大的升力。
(2)延时失速
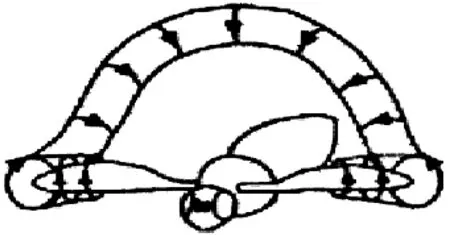
图2 尾翼涡流结构
1996年,剑桥大学的Ellington通过飞蛾动态模型的流体实验研究振翅的轨迹以及翅膀周围的气流,发现在翅膀下拍过程中前缘两端会产生分离的流场,称为前缘涡(如图2所示)。由于翅膀的快速拍动带动涡的快速转动,在翅膀的上表面形成了一个低压区,从而可以产生较高的升力[5-6]。
随着前缘涡逐渐增大,涡不断向翅膀表面后缘流去,并渐渐从翅膀上流出,进入尾流,引起升力急剧减小,就会产生失速现象。但实际上,昆虫不会像飞机一样产生失速现象,因为前者每一个扑动周期结束时翅膀快速反转,在上拍开始处又会形成一个新的前缘涡,进行下一个周期,从而升力得以保持。
(3)旋转环流和尾流捕获
昆虫是靠翅膀的拍动来飞行的,翅膀近似在一个平面内拍动,称之为拍动平面,并在该平面内作往复式旋转,其拍动范围(即拍动角)大约为120°。当昆虫飞行时悬停,该拍动平面几乎是水平的。每当翅膀由后向前拍动时,翼弦与拍动平面有一定的夹角(即攻角,也称迎角),从而产生升力;而当翅膀由前向后拍动时,翅膀翻转过来,由向前拍动时的下翼面转换成了向后拍动时的上翼面,同样具备一定的攻角并产生升力。在这样一个拍动周期中产生的平均气动力是垂直向上的。当向前飞或向后飞时,昆虫的拍动平面是向前或向后倾斜的。
昆虫悬停飞行时,其拍动平面保持水平,此时平均气动力垂直于拍动平面向上,向前飞行时该拍动平面则向前倾斜。由于这个原因,昆虫飞行时由悬停状态翅膀的向前拍动转换成了其机体向前飞状态时翅膀的向前下方拍动,由悬停状态时翅膀的向后拍动转换成了其机体前飞行状态时翅膀的向后上方拍动。通常情况下,下拍为各种飞行姿态的向前拍动,上拍为向后拍动,也称为上挥;平动为拍动平面内的运动,转动为前后拍之间的翻转。
1999年,美国加州大学伯克利分校的Dickinson等人发现在翅膀上拍和下拍的结束阶段会各自产生一个升力峰,是由昆虫旋转扑翼引起的,成为旋转环流。拍动开始阶段的升力峰是由昆虫翅膀利用上一次的尾迹产生的“附加风速”形成,称为尾流捕获[3、7];拍动结束阶段的升力峰可用棒球的马格纳斯效应来解释。
用马格纳斯效应来解释旋转环流产生升力的机制:昆虫翅膀的拍动过程在流体中将产生类似于棒球旋转的作用,如图3所示,平动和转动时空气沿平动方向相反的方向流过,其中翅膀上表面的流速大于下表面的,使得上部单位面积空气压力小于下部同等面积空气压力,从而借助压力差产生向上的升力。
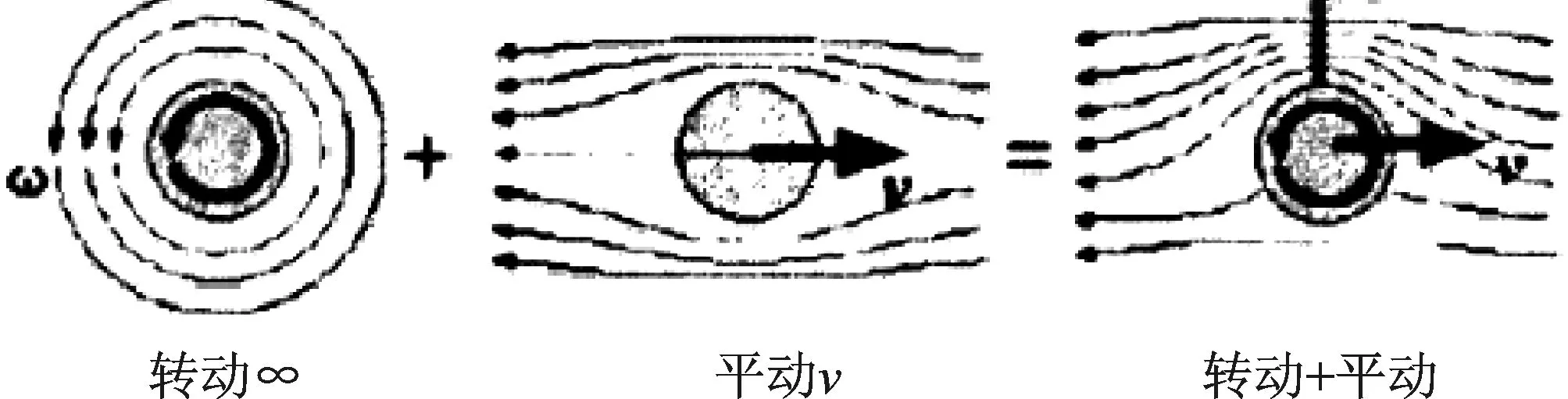
图3 空气动力示意图
这样,可将昆虫翅膀的拍动周期分为4个部分,其中平动和转动各两个,并可以认为昆虫的高升力是延时失速、旋转环流和尾流捕获三个机理相互作用的结果。其中,延迟失速是平动时产生的升力,旋转环流和尾流捕获则是在转动时产生的升力。
2 扑翼机组成
2.1 主控单元
主控单元采用STC15系列芯片,它属于8051系列的加强版,在8051的基础上集成了上电复位电路和高精度的RC振荡电路,并且加大了FLASH以及EEPROM,集成了ADC、PWM、SPI等高功能接口部件。同时简化了单片机系统的外围电路,使单片机系统的设计更加简洁,性能也更加高效。
STC15系列中STC15F2K60S2单片机的使用频率最高,提供了60 KB的FLASH空间,足以满足用户的编程需求,同时ADC、PWM等一系列的高功能接口部件也更加稳定。
2.2 翅 膀
昆虫个体小,重量轻,翅膀由不透气的薄膜组成并且昆虫的翅膀是自然界中最轻的材料之一,没有骨骼和肌肉。昆虫的翅膀一般是三角状,前面的边缘叫前缘,后面的边缘叫后缘或内缘,在前缘和后缘之间的边缘叫外缘。前缘与外缘之间的角度叫顶角,在翅基部的角叫肩角,外缘与内缘的角度叫臀角,如图4所示。

图4 翅膀结构
昆虫的翅膀在飞行的过程中伴随着快速且变化多样的拍动,会产生不同于周围大气的局部气流。根据实际的研究情况,具体考虑翅膀的形状和大小,模仿昆虫采用坚韧富有弹性的翅膜材料,在翅膀的前边缘和中心的翅脉位置加入空心的坚硬材料保证翅膀不会产生形变,同时减少了翅膀的重量,翅膀的后部不做固定,使其在扇动过程产生一定角度以便将空气向后排出,产生向前的推力(动力)。
2.3 尾 翼
尾翼采用HorizonHobby地平线直线舵机,重量仅为2.1 g,不会对扑翼机造成过多的重量负担,可以精确控制摆动幅度。当舵机转动时带动尾翼转动,用在尾翼上的力可以分解为阻力和升力,其中阻力是沿着流体流动的方向(也就是扑翼机航行方向),升力垂直于流体流向。升力相对于机身会产生转舵力矩,使得扑翼机转向。
2.4 电 源
电源采用3.7 V小型航模锂电池,重量轻,满电电压为4.2 V,可以150 mA的电流大小持续供电一个小时,满足扑翼机需要。锂离子电池的寿命一般均可达到500次以上,甚至1000次以上,并且无公害,没有记忆性,使用不含镉、铅、汞等对环境有污染的元素。
2.5 通 信
通信上采用2.4 GHz通信模块nRF2401,其支持6路通信的数据接收,支持2.4~2.5 GHz ISM频段;对电压的要求低,仅为1.9~3.6 V,使得功耗小,增加了扑翼机的续航时间;通信速度可以达到2 Mbps,减少了无线信号的碰撞现象;内置天线可尽量减少扑翼机的体积。该款芯片内置功率放大器、晶体振荡器、频率合成器和调制器等功能模块,输出功率和通信频道可通过程序进行配置。芯片能耗低,以-5 dBm的功率发射时,工作电流只有10.5 mA,接收时工作电流只有18 mA,拥有多种低功率工作模式,节能设计更加方便。借助DuoCeiverTM技术,nRF2401可以使用同一天线同时接收两个不同频道的数据。使用标准插针Dip2.54 mm间距接口,便于嵌入式应用。
2.6 驱动电机
主控制电机采用7 mm空心杯电机,能量转换效率高,其效率一般在70%以上,部分产品可达到90%以上(铁芯电动机一般在70%)。同时启动、制动迅速,响应极快,机械时间常数小于28 ms(铁芯电动机一般在100 ms以上),可以方便地对转速进行灵敏的调节,运行稳定可靠,转速波动小,作为微型电动机其转速波动容易控制在2%以内。另外,空心杯电动机的能量密度大幅度提高,与同等功率的铁芯电动机相比,其重量、体积减轻了1/3~1/2。铜板线圈方式为无有槽硅钢片,这就消除了槽与磁石相互作用的齿槽效应,线圈没有铁心,所有的钢铁部件要么一起转动(比如无刷马达),要么全部静止不动(比如有刷马达),齿槽效应和转矩滞后现象明显不存在。由于没有静止的硅钢片,所以不存在转子与定子间的径向磁力。在关键应用场合中,这一点尤其重要,因为转子与定子间的径向力会造成转子不稳定。减少径向力将改善转子的稳定性。没有槽的硅钢片,减小了转矩和电压的谐波。
同时,由于马达内不存在AC场,所以也没有AC产生的噪音,仅有轴承和气流产生的噪音和非正弦波电流造成的振动。由于线圈位置精确,马达的电压谐波较低,并且由于铜板线圈在气隙中的这种结构使产生的诱起电压波形平滑。正弦波驱动和控制器可以使马达产生平滑的转矩,这种特性在慢速运转的物件(例如显微镜、光学扫描仪和机器人)和精确位置控制上特别有用,平稳运转控制是关键。 铜板线圈内外表面都有空气流动,这比有槽转子线圈的散热好。传统的漆包线嵌在硅钢片的槽里,线圈表面气流少,散热情况不良,温升较大。同等的输出功率,铜板线圈方式的马达温升较小。
3 扑翼机的设计
3.1 硬件设计
原理设计如图5所示,因为其是飞控核心板,所以要小巧简练和稳定,故电源处应加0.1 μF滤波电容,还因空心杯启动时会有800 mA的瞬时耗电,故又加了一个10 μF电容。电机驱动部分应用三极管放大电流原理。因为空心杯瞬时耗电只需800 mA,所以选用8050三极管(实测8050三极管会发热,所以采用并联一个三极管的方法来提高放大电流)。

图5 飞控板原理图
3.2 软件设计
下位机部分用到了STC15F2K60S2的两路PWM。软件模拟的SPI协议驱动nRF2401无线模块。代码执行流程为先进行相应的初始化,然后循环接收数据,进行数据判断,执行相应的动作,程序流程如图6所示。
上位机部分用到了STC15F2K60S2的两路ADC采集。软件模拟的SPI协议分别驱动了0.96寸OLED及nRF2401无线模块。代码执行流程是先进行各个模块的初始化,然后进行数据采集与发送,程序流程如图7所示。
3.3 调试总结
飞控核心板的设计要考虑到大小、稳定、重量等问题,如果太小就会涉及到干扰,因为2.4 GHz的频率和单片机之间的相互干扰还是很大的,不过可以在以后的PCB设计中把信号线远离电源及其他信号线,比如把分离出的信号线放在扑翼机尾部。经过测试,单片机输出的PWM为50 Hz的时候,会和无线模块造成串扰,后来增大到100 Hz,干扰减少,基本可以保持稳定飞行。实物如图8、图9所示。
图6 飞控板程序
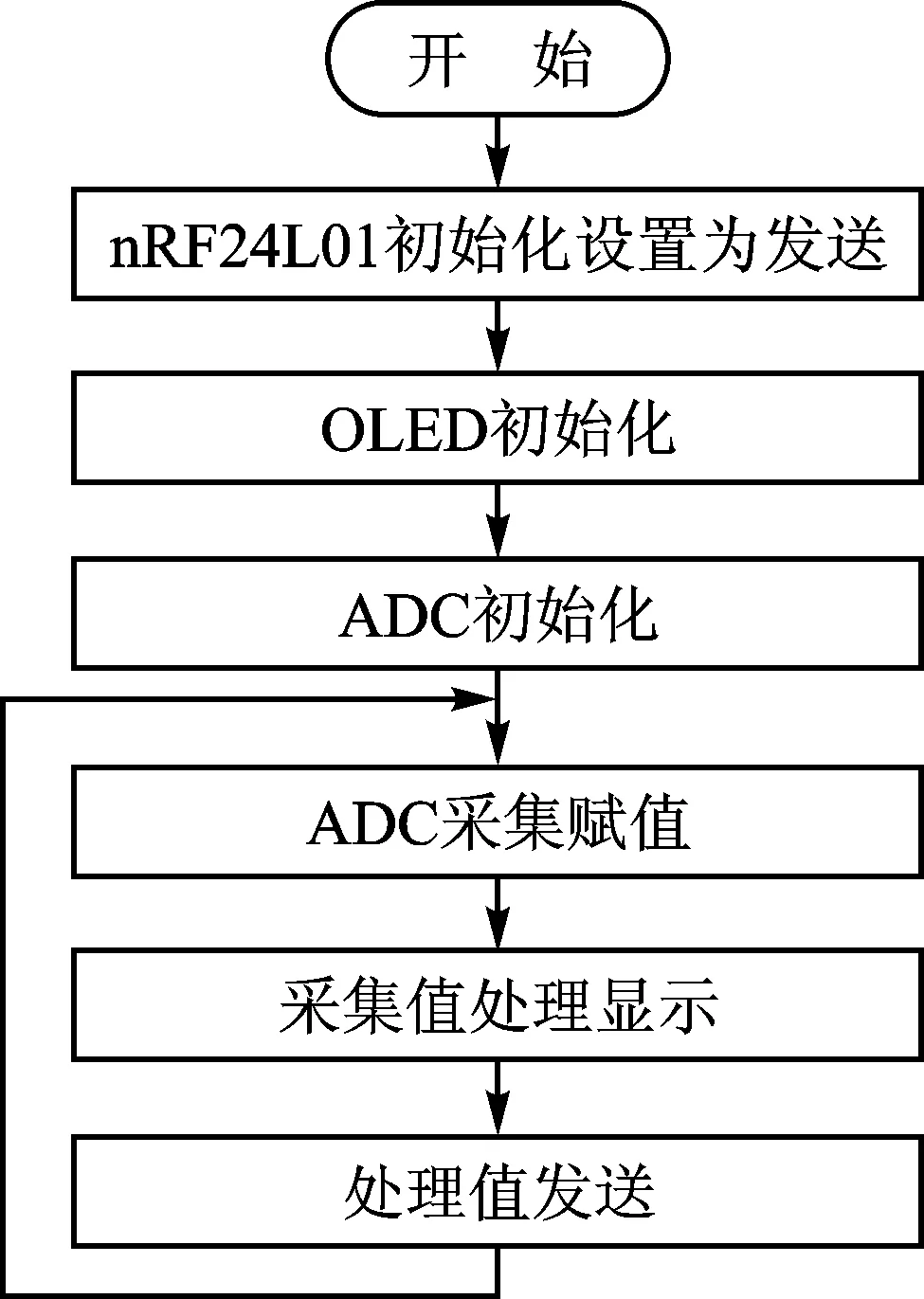
图7 遥控器程序框
无线传输部分可以从传输距离、传输速度以及传输质量三个方面加以改进。如需加进图像传输,需要把无线模块换成WiFi模块;电机方面可以加大电机转速,使用性能更加优秀的电机;电源部分需增加其稳定性,以及减小功耗,降低重量,增加其容量及瞬时功耗等一系列电池参数;扑翼机骨架可以使用更加轻便的材料,从而减少扑翼机的质量;主控板需要更加轻薄以增加续航时间。
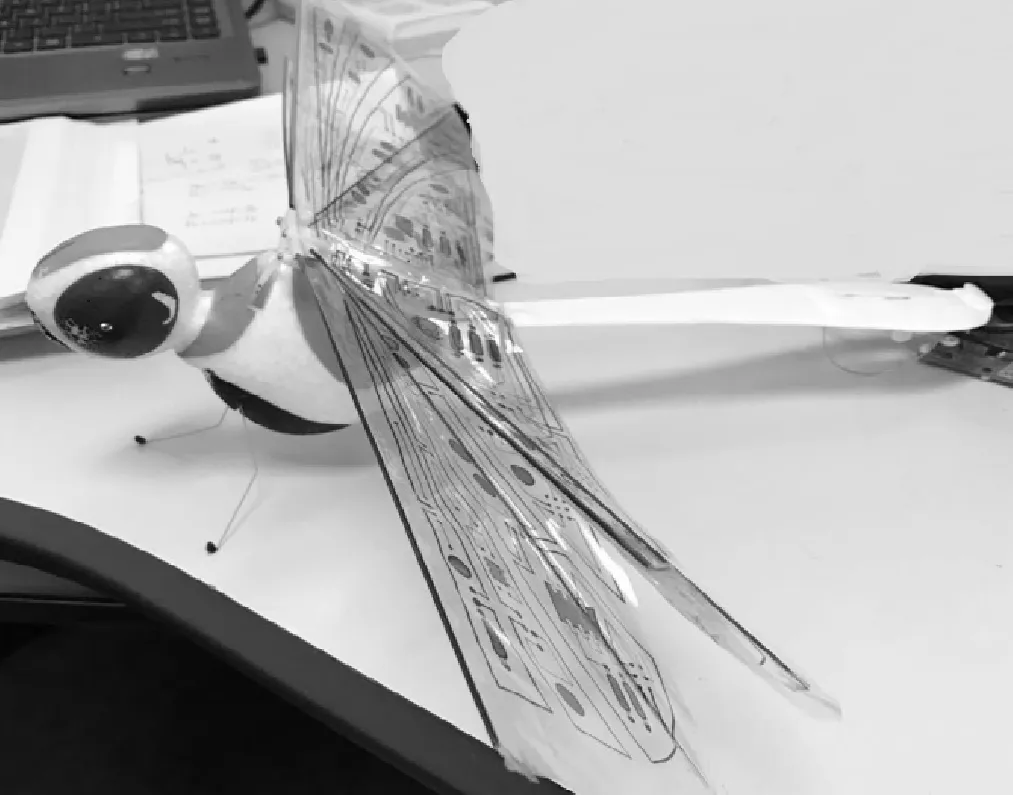
图8 扑翼机实物图

图9 尾部放大图
该扑翼机仅用了3个通道、两个维度。如需改进其飞行效果,还需增加控制通道,达到侧飞、悬停等效果。本项目主要困难在于扑翼机机型设计及飞行控制,模电的稳压及空心杯驱动电路设计更改的空间较大。
结 语
本文描述了一款模拟昆虫飞行方式的微小型扑翼机的设计实现,通过2.4 GHz无线模块进行控制通信,为减轻重量,采用贴片8050三极管来驱动空心杯电机,尾翼采用航模的地平线舵机,实现飞行控制。飞行方式采用蜻蜓的飞行方式,但由于无法达到对单个翅膀操作的机械结构,所以尾翼采用直升机式尾翼,以此来控制转弯及平衡。扑翼机骨架用细探杆构建,翅膀采用塑料材质,
Small Bionic Ornithopter Simulating Insect Flight Mode
GaoZhaoling1,ZhouHaoshang2
(1.Department of Electronic Engineering,Dalian Neusoft University of Information,Dalian 116023,China;2.CRRC Dalian R&D Co.,Ltd)
In this paper,a miniature ornithopter simulation of insect flight mode is designed,which modeled on the wings of the dragonfly and helicopter tail.The remote control design and fabrication of bionic flapping machine are realized taking STC15F2K60S2 as the main control chip and using the mainstream wireless module.The actual test results show that it can satisfy the requirements of flight.
STC15F2K60S2;small bionic ornithopter;single chip;aerodynamics
TP368.2
: A
猜你喜欢
实验流体力学(2023年1期)2023-03-21 01:41:06
玩具世界(2022年3期)2022-09-20 01:48:20
湖北工业职业技术学院学报(2021年1期)2021-04-01 09:22:28
装备制造技术(2020年1期)2020-12-25 05:18:18
名车志(2020年10期)2020-10-27 09:51:06
甘肃教育(2020年2期)2020-09-11 08:01:48
民用飞机设计与研究(2020年1期)2020-05-21 07:24:38
空间科学学报(2020年4期)2020-04-22 01:17:20
小学生优秀作文(低年级)(2018年9期)2018-09-10 05:47:38
小学生必读(低年级版)(2018年11期)2018-03-13 00:54:24