
网联汽车的安全漏洞及其对协同驾驶的影响
2017-09-25 02:38:56
汽车文摘 2017年9期
网联汽车的安全漏洞及其对协同驾驶的影响
实现自动驾驶汽车控制对车辆通信信道的安全性有非常严格的要求,以满足交换信息以及执行诸如自适应车速或变道等复杂任务。为此,车辆需要获取彼此的信息,以增强汽车的提前规划和决策优化等自动驾驶能力,实现自动协同驾驶,并提高车辆的整体安全性和操纵性。
通过车辆自组织网络(VANET)实现车辆间(V2V)通信是一种可行的方法,可以建立紧密耦合的车辆流,但这种方法还存在很多安全性问题。研究了网联汽车通信系统遭受安全攻击以及协同自适应巡航控制(CACC)系统传感器信号被篡改后对汽车安全的影响(图1和图2)。通过假设系统在各种情况下(包括应用层、网络层、系统层)遭到攻击来分析V2V通信所遭受的损害。
为了更好地分析具备ACC(自适应巡航)/CACC功能的汽车和无人驾驶汽车等网联汽车的安全风险,研究了针对汽车流量的不同攻击方式,并讨论了确保系统安全的设计方法,通过仿真模拟分析了安全攻击所造成的追尾或汽车流不稳定等影响。
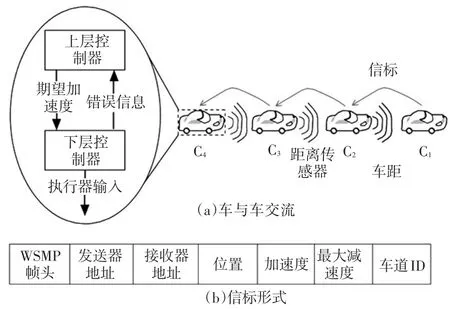
图1 CACC系统两级纵向控制

图2 对网联汽车安全性的影响方式
刊名:IEEE Communications Magazine(英)
刊期:2015年第6期
作者:Mani Amoozadeh et al
编译:张志阳
猜你喜欢
汽车工程师(2021年12期)2022-01-18 06:02:43
内燃机与配件(2022年2期)2022-01-17 23:46:44
高技术通讯(2021年3期)2021-06-09 06:57:30
建材发展导向(2021年23期)2021-03-08 01:05:44
玩具世界(2018年6期)2018-08-31 02:36:26
东南大学学报(自然科学版)(2018年1期)2018-02-08 00:40:30
电子设计工程(2017年20期)2017-02-10 03:39:57
中国公共安全(2017年9期)2017-02-06 03:05:39
信息安全与通信保密(2016年3期)2016-08-23 01:23:46
电子设计工程(2015年12期)2015-02-27 12:06:24
