
基于马尔可夫模型优化的非经典感受野轮廓检测算法
2017-09-23 03:03胡玉兰
计算机应用与软件 2017年9期
胡玉兰 刘 阳
(沈阳理工大学信息科学与工程学院 辽宁 沈阳 110159)
基于马尔可夫模型优化的非经典感受野轮廓检测算法
胡玉兰 刘 阳
(沈阳理工大学信息科学与工程学院 辽宁 沈阳 110159)
基于非经典感受野的同性抑制作用提出一种新的算法。该算法首先将多级周边抑制引入到各项同性检测模型中;其次根据集合理论,结合边缘生长过程控制思想提出一种改进的组合方法,解决了抑制参数取值对轮廓检测的影响;最后根据马尔可夫随机场理论建立轮廓概率模型,得到最终优化后的输出轮廓。实验结果分析表明,新算法精度高,明显优于传统方法。
轮廓检测 非经典感受野 马尔可夫随机场 多级周边抑制
0 引 言
边缘检测是计算机视觉和模式识别中的一个重要研究问题,在科学和工程问题中都有着广泛的应用,例如物体识别、形状分析[1]等。一些现有方法中有的是根据差分统计学的,还有一些是基于动态轮廓[2]、局部相位分析[3]及模糊推理[4]的。尽管前人已经在这方面作了很大的贡献,但仍有人对现有方法进行改进和更新,进而提出更有效的轮廓检测方法。人类视觉系统拥有从杂乱的场景中迅速有效地提取轮廓特征的能力,这激励我们探索更强大的轮廓探测器。
心理生理学研究表明,大多数初级视皮层神经元的感受野外部区域对感受野有着调制作用,并且大部分显示的是周边抑制作用,即非经典感受野。以感受野为基础的显著性提取已经在轮廓检测和纹理抑制方面得以实现。如果在经典感受野的中心部分,以及它的外周同时出现相同类型的刺激时,周边抑制区会减弱神经元对刺激的响应,相反会得到增强。有许多理论证实[5-9],这种视觉机制的非经典感受野的周边抑制作用可以使视觉系统抑制复杂背景下自然图像中的纹理性边界,进而可以使目标的整体轮廓显著突出。
有文献表明大部分周边抑制作用远比想象中的复杂。文献[5]第一次提出基于周边抑制作用的计算模型,用来检测自然图像中的目标轮廓。文献[6]又将周边抑制与传统的Canny边缘检测算子相结合来抑制纹理,进而提高该算子对轮廓检测的能力。由于该算法存在自抑制现象,有些弱轮廓不能很好地检测出来。为避免上述现象的出现,有学者不断地提出改进的算法,Sang等[7]把非经典感受野分为两个侧区和两个端区,基于此提出一种改进的算法,把感受野的周边抑制区分为两个蝶形抑制区域,该蝶形区分别位于初级视皮层神经元最优朝向两侧。该蝶形机制的引入,减少了由背景纹理产生的边缘,但同时也抑制了一部分弱轮廓,使得整体轮廓不完整。文献[7]研究发现非经典感受野对中心区的作用不仅仅有抑制,还有易化。正由于该复杂神经机制原理使得我们能够感知到弱轮廓的存在。文献[8]提出了一方向显著性为基础的抑制模型,该模型是一种各向同性和各向异性的抑制机制相结合的单一模式,虽然减少了纹理影响,但同时存在模式单一及相应参数需要人为输入等缺点。
由于上述算法都是在单一模式下实现的,其抑制项权重(抑制水平)需要乘以一个输入参数,该参数必须由用户指定,其最佳值可能随图像的变化而变化,参数值设置得过大或过小都会影响轮廓的检测。针对这些缺陷,本文将多级周边抑制引入到各向同性模型中,同时提出改进的组合算法,最后根据马尔科夫随机场理论建立轮廓概率模型,来去除噪声产生的边缘进而保护弱轮廓。
1 非经典感受野轮廓检测原理
1.1 高斯梯度和周边抑制
基于高斯梯度边缘检测的传统方法不能抑制纹理性边缘,文献[9]把周边抑制引入到基于梯度的边缘检测中,达到了抑制纹理性边缘而保护轮廓的目的。为除去把最原始图像数字化带来的影响,一般情况下使用一种滤波器对图像进行平滑和噪声处理。
令I(x,y)为一幅灰度图像,其高斯梯度表达式为:
▽σI(x,y)={I(x,y)*▽gσ(x,y)}
(1)
(2)
式中,gσ(x,y)代表二维高斯函数,梯度▽gσ(x,y)和灰度图像I(x,y)进行卷积运算得到高斯梯度▽σI(x,y),也就是先用二维高斯函数对灰度图图像进行平滑去噪处理,再对处理后的图像进行梯度运算。
描述神经元周边抑制作用的距离权重函数由下面公式构成:

(3)
式中,当z<0时,H(z)=0;反之H(z)=z。


(4)
式中,‖·‖1表示L1范数,H(z)保证算子作用在抑制区域内,也即非经典感受野内,DOGσ(x,y)模拟了非经典感受野(如图1)的环形区域,并且体现了抑制作用的变化强度,从弱到强再由强到弱。
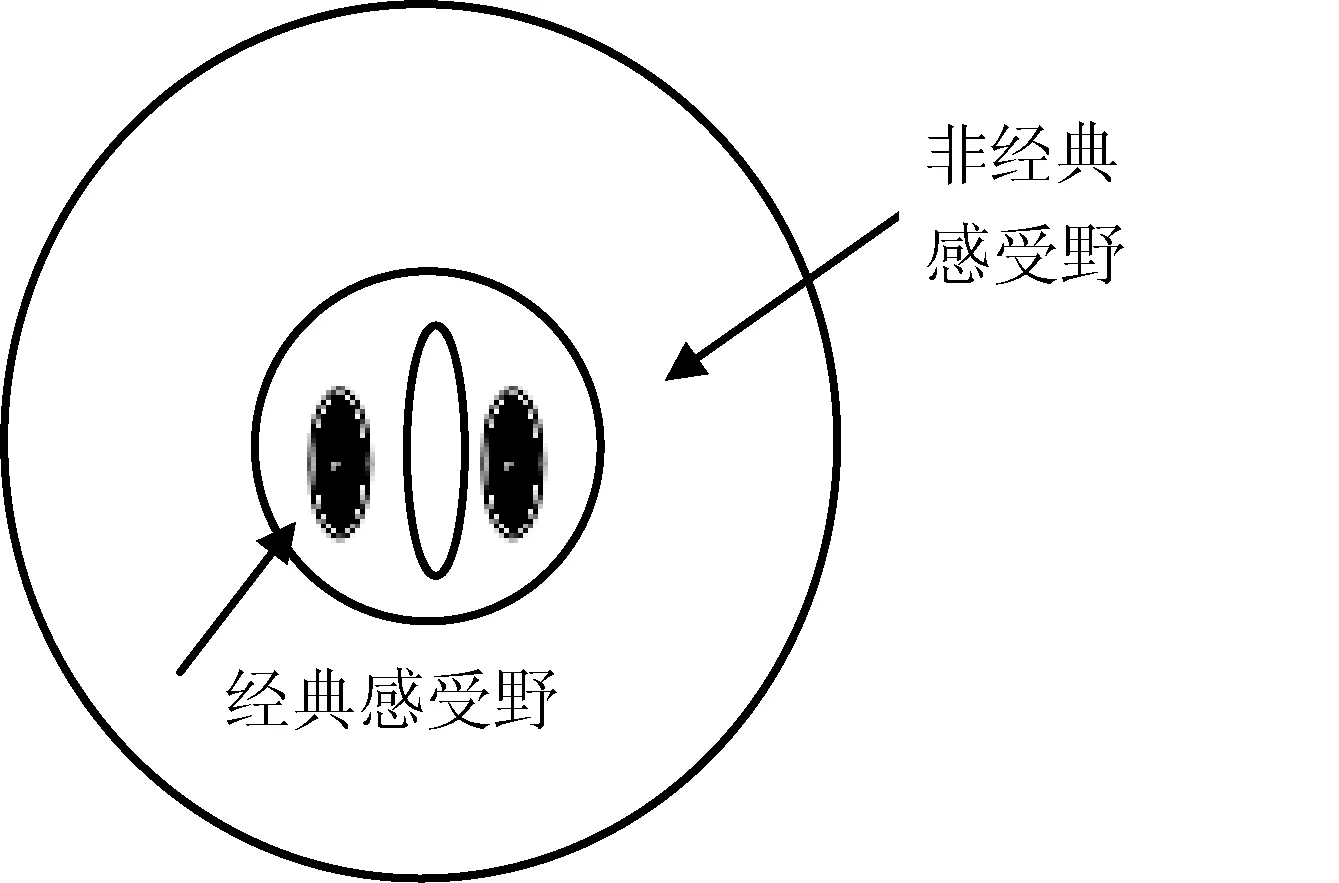
图1 非经典感受野
1.2 各向同性抑制模型
一些研究表明[10],在初级视皮层细胞中具有各向同性抑制作用的比具有各项异性抑制作用的比例大,并且各向同性抑制作用模型的模拟更容易、方便实现,计算简单,抑制效果好,因此本文的非经典感受野的基础模型选择了各向同性抑制。在各向同性的情况下,周边刺激与中心刺激的朝向的改变所带来的抑制程度并没有明显的变化,这一现象可用Gabor能量集合来模拟,该集合是由一些Gabor能量函数的最大值组成,表达式如下:
(5)

(6)
式中,Eλ,σ,θ(x,y;θ)为Gabor能量函数。Eλ,σ,θi(x,y)为N个不同朝向θi的Gabor能量滤波函数,其中:

(7)
eσ,λ,φ(x,y;θ)=I(x,y)*
(8)
同时获得方向集合θj,即梯度方向为:
j=argmax{Eλ,σ,θi(x,y)|i=1,…,N}
(9)


(10)
则图像梯度幅值▽σI(x,y)经过抑制后的响应为:
(11)

2 新的轮廓检测算法
由于上面提到的检测算法都是单一模式下的,由式(11)可知,单水平抑制时,当α取值较小时,虽然能够较好地保护目标轮廓,但是纹理性边缘不能得到充分的抑制;反之,当α取值较大时,虽然可以充分地抑制纹理性边缘但目标轮廓会部分丢失。为克服上述缺陷,将文献[13]中的多级抑制思想引入到改进的各向同性周边抑制模型中,同时进一步提高轮廓的检测性能,提出一种新的轮廓检测算法。
2.1 基于多级抑制的各向同性周边抑制的改进
2.1.1 各向同性周边抑制参量的改进
由于上述输出的响应仍存在自抑制现象,因此我们需要对各向同性周边抑制参量进行改进,将文献[14]中改进的蝶形抑制模型理论应用到该算法中,改进的蝶形抑制模型是将非经典感受野分为四个区,即两个抑制侧区和两个易化端区。易化区位于沿最优朝向轴的两侧,且其上的刺激对神经元响应产生增强作用,抑制侧区位于轴向垂直方向的两侧,该区上的刺激对神经元响应产生抑制作用。易化量过大会使更多的纹理输出,若过小,弱轮廓得不到增强,产生自抑制现象,所以应该选择合适的抑制参量。根据式(10)外区抑制量和易化量分别定义为:
(12)
(13)
令易化因子与抑制因子的值1[14],得到本文需要的改进的各向同性周边抑制参量为:
(14)
则梯度幅值经过改进的周边抑制作用后的响应为:

(15)

(16)
式中,T为像素的最大值,这样保证所取得像素点在最大像素点之内。
2.1.2 图像的后处理
对上述改进的各向同性周边抑制输出后的响应C(x,y)进行图像的后续处理操作,此过程包括非极大值抑制和迟滞抑制。通过非极大值抑制能够将抑制输出后的响应边缘细化为相应的候选轮廓。接着使用迟滞抑制对得到的轮廓进行二值化处理,在迟滞阈值的过程中需要设置两个阈值th和tl。th的设定与分位数p满足以下关系:

(17)
式中,Card为求取非零集合中元素的个数;m表示候选像素的点数。一般取tl=0.5th,响应中大于等于th点的候选轮廓像素,可以直接认为是轮廓点输出到二值图b(p,α)中,而位于两阈值之间的像素点,若能通过一些方法与某一轮廓像素链接上,则保留下来将其加入到b(p,α),剩下的像素点被认为是噪声点将被丢弃。
2.1.3 基于多级抑制的组合方法的改进
图2显示了通过不同抑制参数处理后的二值图像b(p,αk),从图像中可以发现,随着αk的取值不同,图像轮廓也跟着变化。有些检测到轮廓的同时也保留了噪声点,还有一些抑制噪声点和纹理性边缘的同时也抑制了需要检测的轮廓。为了能够很好地解决这一问题,本文定义了集合运算,即交集和并集,公式如下:
(18)
(19)

图2 不同抑制参数处理后的二值图像,p=0.2
集合运算的结果在图2中显示,交集中去掉了很多纹理性边缘和噪声点但同时也去掉了一部分的轮廓点,所以交集中含有很多不连续的轮廓片段,并集中包含了所有的像素点,既有整体的轮廓又包含了所有的噪声边缘。为了选出完整轮廓同时抑制纹理性边缘排除噪声,本文根据交集和并集理论,结合边缘生长过程控制思想,提出了一种改进的组合方法。即首先循环遍历并集Bp,u中的所有像素点,之后将得到的弱轮廓像素点与Bp,i做并集运算。具体步骤:

(20)

Step2建立长度可变的堆栈。从集合Bp,u中任一点作为起始点进行像素扫描,如果发现卷积比TS大,但该点还没有标记为轮廓像素就将该点放入栈中,之后将后一个像素的位置进行保存并转到Step3。
Step3判断堆栈是否为空,如果不为空,则转到Step4,否则返回到Step2,从所保存得位置开始继续进行像素扫描。
Step4将栈顶的像素Q出栈并标记为轮廓点。在Q的8邻域中查找卷积大于零,Q邻域极大且标记为轮廓像素,如果找到就将该点放入栈中。当Q的邻接像素均被访问后转到Step3。
Step5最后输出所有轮廓点为Bp,a。
组合后的结果公式为:Bp,c=Bp,i∪Bp,a-Bp,i。组合后的结果Bp,c去除了大部分的噪声和纹理边缘,同时保留了较为连续完整的轮廓,如图2所示。由于最后的结果中还包含一些噪声片段,需要进一步处理,下面提出了根据马尔可夫随机场理论建立了一种模型来排除噪声片段而保留轮廓片段。
2.2 基于马尔可夫随机场理论的轮廓概率图模型
近年来,基于马尔可夫随机场理论的视觉信息处理得到了各界广泛关注,由于人类视觉感知过程存在很多不确定性,而马尔可夫随机场理论正是通过概率论的方法能够很好地解决上述存在的问题。所以,本文根据马尔可夫随机场理论提出了一种判断方法来区分噪声片段和轮廓片段这种视觉上的不确定性。如图3所示,f1是轮廓片段,f2是噪声片段,由于它们的长度相差很小,但位置不同。如果直接除去较短的边缘片段,那么想要保留的弱轮廓片段f1也被排除了,从而造成结果图的不连续。马尔可夫随机场是由随机变量构成的无向图,描述了像素点之间的空间相关性,马尔可夫随机场定义如下:首先给定无向量图G(V,E),指明变量间的连接关系。再设随机变量集合X={Xv,v∈V},状态空间∧={1,2,…,L},Xv∈∧,状态解空间:
Ω={ω=(Xv1,Xv2,…,Xvn):Xvi∈∧,1≤i≤n,则称X是一个马尔可夫随机场,只有[16]:
(1)P(X=ω)>0时,对所有ω∈Ω;
(2)P(XiXj,j≠i)=P(XiXj,j∈N(Xi))。
式中,N(Xi)代表点i的邻域点的集合。变量Xi,j的概率分布独立于其他点只取决于它相邻点。在这里我们把图像看作马尔可夫随机场,建立图像概率模型,则图像中任何一点的像素都可以通过该点的邻域来进行计算。具体地,对于Bp,c中的每一条轮廓f,其轮廓概率定义为:

(21)
式中,length(·)代表求取轮廓长度,fmax表示Bp,c中的最长轮廓。之后定义轮廓点概率,表示为:

(22)
(23)
式中,U(x,y,q)代表轮廓点(x,y)的q邻域。由此可知该点周围所有轮廓概率的加权平均为该点的轮廓概率。图3中的边缘f2的附近周围没有其他轮廓存在,因此f2上的轮廓点的概率值比较低。相反f1周围存在着长轮廓,因此点的概率高。f1和f2的长度虽然几乎相同但是它们点的概率值完全不同,所以可以去除f2,进而保留f1。
通过式(22)得到p(x,y,q)后,根据实际情况设定阈值Tp来对p(x,y,q)进行最后的处理,最终轮廓输出为:
Bp,c=p(x,y,q)>Tp
(24)
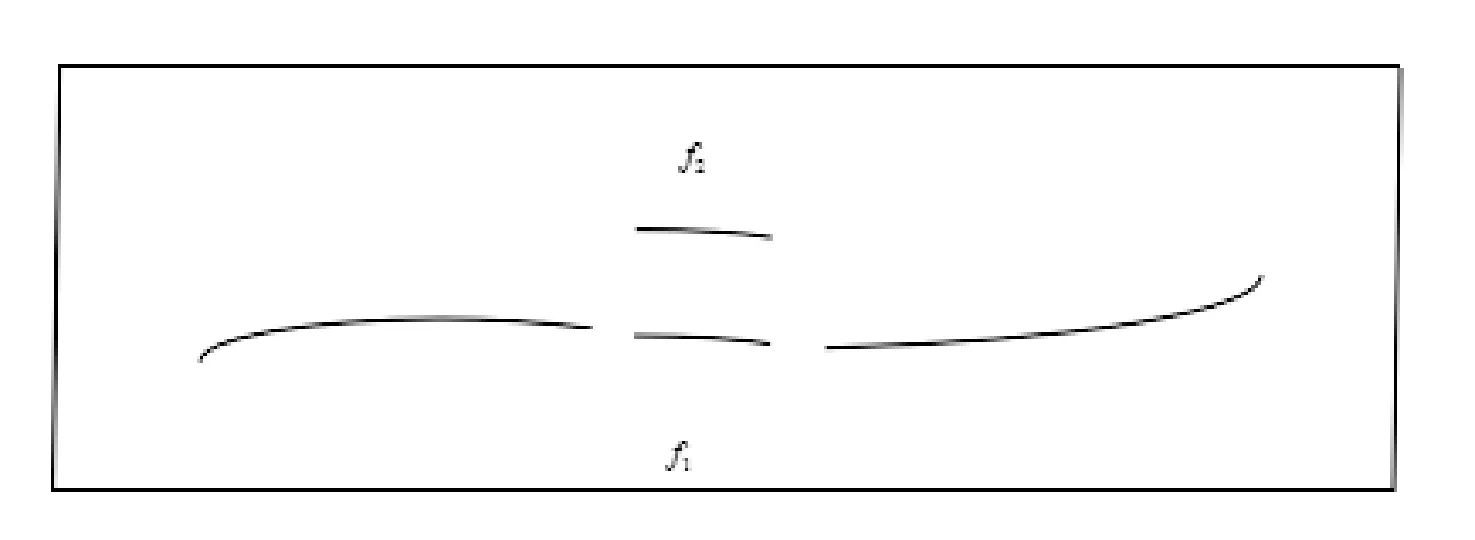
图3 轮廓和噪声片段的比较
2.3 算法流程
轮廓检测算法流程如图4所示。首先利用式(1)计算灰度图像的高斯梯度,得到梯度幅值,再根据式(10)得到各向同性周边抑制参量,并通过不同的抑制参数作用各向同性周边抑制参量上,根据式(15)得到输出响应,接着对输出的各级响应进行后处理,得到边缘响应集合;之后计算所有边缘响应的交集和并集,根据交集和并集理论,结合边缘生长过程控制思想,提出了一种改进的组合方法;最后根据马尔可夫随机场理论建立轮廓概率模型,对输出的图像进行最后的优化处理。

图4 轮廓检测方法
3 实验分析与性能评估
3.1 轮廓检测图的比较
从图5中看出,新算法检测的轮廓最好,含有的背景冗余信息最少,而传统的轮廓检测算法,例如Canny算法检测的是图像中几乎所有的边缘,因为其并没有考虑空间上点与点之间的相互作用,因此不能区分出纹理性边缘和目标轮廓。DOG算法使用的滤波器的结构是圆环型的,会造成本身的自抑制现象,虽然去除了部分的背景纹理,但是由于自抑制现象使其目标轮廓不连续。改进的各向同性算法一定程度上避免了自抑制现象,在抑制纹理性边缘和保护若轮廓方面的性能有了很大提高,但是该算法的组合方法任然存在改进的地方,且对噪声边缘没作进一步的处理。新算法的轮廓检测图中,在抑制纹理、保护弱轮廓和去除噪声等方面的效果明显优于其他算法,轮廓边界更清晰,检测效果最好。
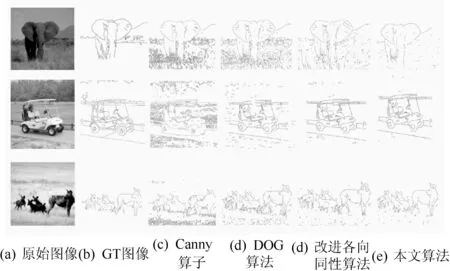
图5 四种算法的轮廓检测比较图
3.2 轮廓检测性能的评估
为客观地评价本文算法与其他三种算法的优越性,便于定量分析,定义了轮廓检测性能[14],公式如下:
(25)
M=max(card{DC},card{GT})
(26)
式中,DC表示检测到的轮廓像素集合,GT为真实轮廓像素集合,card{*}用来计算*中集合的点数,dGT为GT的距离变换,d0是一个尺度参数,由于人类可以绘制轮廓的位置精度为2个像素,所以本文设置d0=2。该算法的检测性能是采用Grigorescu图像库[11]中的50幅图像来衡量的,检测性能F限定在0到1之间,F的值越大检测性能越好,所检测出的轮廓越接近真实轮廓。本算法中主要涉及到抑制水平α和分位数p两个参数,下面绘制α-F和p-F曲线来观察本算法和其他算法[5,7,9,13]的检测性能,见图6、图7。

图6 抑制参数对检测性能的影响

图7 分位数p对检测性能的影响
从图6可以看出,本文算法的检测性能明显优于各向同性算法,同时可以观察到对于各向同性算法当α>2.5时自抑制明显,而对于本文算法α>3时,自抑制作用才明显。图7是在σ不变的条件下绘制的F随p
的变化。图像中的边缘点的个数由p决定,p越大轮廓点数也越大。从图7观察到,大多数情况下本文的算法明显比其他3种算法的检测性能好。由于p接近零时,大部分弱轮廓被舍弃,而强轮廓被保留,所以本文算法的轮廓检测性能略有下降。但在实际应用中,p的这种极端取值情况一般不予考虑。
4 结 语
新的轮廓检测算法,将多级抑制引入到改进的各向同性抑制模型中,同时利用改进的组合方法对单级抑制水平进行整合,去除了大量的强纹理,克服了人为输入抑制参数和自抑制的问题。之后根据马尔可夫随机场理论建立轮廓概率模型,很好地保护了弱轮廓。这样有效地去除了强纹理同时保护了弱轮廓,使得自然图像轮廓更加清晰连续,轮廓检测性能得到了优化。新算法简单、高效,通过定量和定性实验分析,该算法是可行的,并且优于其他3种轮廓检测算法。
[1] Lui L M,Zeng W,Yau S T,et al.Shape Analysis of Planar Multiply-connected Objects using Conformal Welding[J].IEEE Transactions on Pattern Analysis & Machine Intelligence,2014,36(7):1384-1401.
[2] Li H,Yezzi A.Local or global minima:flexible dual-front active contours[J].IEEE Transactions on Pattern Analysis & Machine Intelligence,2007,29(1):1-14.
[3] Kovesi P.Image features from phase congruency[J].Journal of Computer Vision Research,1999,1(3):1-26.
[4] 沈志熙,代东林,赵凯.基于多特征分步模糊推理的边缘检测算法[J].电子科技大学学报,2014,43(3):381-387.
[5] Grigorescu C,Petkov N,Westenberg M A.Contour detection based on nonclassical receptive field inhibition[J].IEEE Transactions on Image Processing,2003,12(7):729-739.
[6] Ursino M,La Cara G E.A model of contextual interactions and contour detection in primary visual cortex[J].Neural Networks Archive,2004,17(5-6):719-735.
[7] Sang N,Tang Q L,Zhang T X.Contour detection based on inhibition of primary visual cortex[J].Journal of Infrared and Millimeter Waves,2007,26(1): 47-51.
[8] Long L,Li Y.Contour detection based on the property of orientation selective inhibition of non-classical receptive field[C]//IEEE Conference on Cybernetics and Intelligent Systems.IEEE,2008:1002-1006.
[9] Grigorescu C,Petkov N,Westenberg M A.Contour and boundary detection improved by surround suppression of texture edges[J].Image and Vision Computing,2004,22(8):609-622.
[10] Zeng C,Li Y,Yang K,et al.Contour detection based on a non-classical receptive field model with butterfly-shaped inhibition subregions[J].Neurocomputing,2011,74(10):1527-1534.
[11] Daugman J G.Uncertainty relation for resolution in space,spatial frequency,and orientation optimized by two-dimensional visual cortical filters[J].Journal of the Optical Society of America A Optics & Image Science,1985,2(7):1160-1169.
[12] Kruizinga P,Petkov N.Nonlinear operator for oriented texture[J].Image Processing IEEE Transactions on,1999,8(10):1395-1407.
[13] Papari G,Petkov N.An improved model for surround suppression by steerable filters and multilevel inhibition with application to contour detection[J].Pattern Recognition,2011,44(9):1999-2007.
[14] 杜晓凤,李翠华,李晶.基于复合感受野的轮廓检测算法[J].电子与信息学报,2009,31(7):1630-1634.
[15] 王捷,莫灿林,曹国惠.一种基于种子生长的可控边缘检测法及评价方案测法及评价方案[J].浙江理工大学学报,2010,27(5):738-744.
[16] Xu X M,Qiao Y L.Dynamic Textures Segmentation Based on Markov Random Field[C]//Second International Conference on Instrumentation,Measurement,Computer,Communication and Control.IEEE Computer Society,2012:940-943.
CONTOURDETECTIONALGORITHMBASEDONMARKOVMODELOPTIMIZEDNON-CLASSICALRECEPTIVEFIELD
Hu Yulan Liu Yang
(SchoolofInformationScienceandEngineering,ShenyangLigongUniversity,Shenyang110159,Liaoning,China)
We present a new algorithm based on isotropic inhibition effect of non-classical receptive field. First, the proposed algorithm introduced multilevel surround suppression into isotropic detection method. Secondly, an improved combination method based on set theory and the idea of edge growth control was proposed, which had solved the influence of the suppression parameter on contour detection. Finally, according to the theory of Markov random field, we established contour probability model, and got the output contour. The experimental results show that the new algorithm has high precision and is superior to the traditional method.
Contour detection Non-classical receptive field Markov random field theory Multilevel surround inhibition
TP391
A
10.3969/j.issn.1000-386x.2017.09.057
2016-07-08。国家自然科学基金项目(61373089)。胡玉兰,教授,主研领域:图像信息处理,模式识别,人工智能。刘阳,硕士生。
猜你喜欢
计算技术与自动化(2019年3期)2019-11-05
时代英语·高一(2019年5期)2019-09-03
智富时代(2019年6期)2019-07-24
智富时代(2019年6期)2019-07-24
科技创新导报(2019年31期)2019-04-07
财会学习(2018年6期)2018-03-07
通信产业报(2016年44期)2017-03-13
大灰狼(2009年7期)2009-08-26
舒适广告(2008年9期)2008-09-22
雕塑(1999年2期)1999-06-28
