
一种综合时空域背景分离的运动目标检测方法
2017-09-22 01:11:45,,
武汉船舶职业技术学院学报 2017年2期
,,
(1.武汉船舶职业技术学院,湖北武汉 430050; 2.海军工程大学电气与信息工程学院,湖北武汉 430033)
一种综合时空域背景分离的运动目标检测方法
吕金华1,江汉红2,姜春良2
(1.武汉船舶职业技术学院,湖北武汉 430050; 2.海军工程大学电气与信息工程学院,湖北武汉 430033)
针对单时域高斯模型在目标检测中易受光照、噪声等因素的影响,单一时域或空域识别方法又各有其局限性,本文提出一种背景分离的运动目标时空域检测方法;该方法充分利用运动目标在时域和空域中与背景的区别,利用相关系数的差异,通过最小内差法确定阈值门限。通过实验验证,该方法能够在光照突变等复杂背景下,能有效消除光照、噪声等因素影响,实现对运动目标的检测。
运动目标检测;时空域
1 研究背景
运动目标检测是目标运动分析、行为理解等智能活动的基础,目的是从序列图像中将变化区域从背景图像中提取出。运动目标检测在安全监控、车牌识别、目标探测与跟踪中有广泛的应用[1~3]。目前视频中运动目标检测的主要方法有三种:帧间差分法[4]、光流法[5]和背景减除[6]。这些算法有着各自的优缺点,如帧间差分法,算法简单,运行速度快,但很难获取运动物体的完整形状,只能保留轮廓,形成“空洞现象”。光流法是利用图像序列中的像素强度数据的时域变化和相关性来确定各自像素位置的“运动”,光流法主要缺点是计算耗时,实时性和实用性都较差;背景减除法利用背景的参数模型来近似背景图像的像素值,将当前帧与背景图像进行差分比较实现对运动区域的检测,背景减除法的主要缺点是背景的扰动(树枝、水波、光照)对背景的获取影响很大。这三种算法中应用最为广泛的是背景减除法。背景减除法的关键是如何适应背景变化对背景进行动态更新。在这种思路下,后续发展了均值滤波法、中值滤波法、码书模型、隐马儿科夫模型、单高斯模型、混合高斯模型、内核密度估计和均值替换法等多种背景更新算法[7,8]。本文采用联合时域和空域的背景检测方法,利用目标和背景的时空信号相关性差异,实现对目标和背景的分离。
2 高斯背景模型
高斯背景模型最初是由单高斯模型发展起来的,单高斯背景模型是基于假设每个背景像素的亮度在时间域上的一个高斯分布,即背景图像B中任意一点(x,y)的灰度分布服从高斯分布:I(x,y)~N(μ,σ2),因此图像B中任意一点(x,y)的统计属性可以由平均值μ和方差σ2来描述,平均值μ由该像素对应空间点的光反射强度决定,σ2由摄像头CCD的采集噪声水平以及该像素对应空间点反射强度的随机特性决定。将图像I与背景图像相比较,设置比较的阈值T。如果满足
(1)
则该点(x,y)是背景点,反之则是前景点。
采用单高斯背景模型在图像采集装置固定和背景静止时能够取得比较好的效果。但由于在更多的情况下,背景场景通常在不断改变,颜色和光照发生变化,单高斯背景模型不能及时反映背景变化,容易产生错误的检测结果。基于上述考虑,有学者提出基于混合高斯的背景模型。混合高斯模型是将每个像素按照多个高斯模型进行建模,在单高斯的基础上增加高斯模型的个数,由多个高斯模型线性组合成一个混合高斯模型,每个高斯模型有均值、方差和权值三个参数。假设每个背景像素点B(x,y)的值用K个高斯分布来描述,则像素B(x,y)值的概率函数可用式(2)表示:
(2)
其中ωi,xy为点(x,y)上第i个高斯分布的权值,表示在点(x,y)上第i高斯分布在K个高斯分布的重要程度,μi,xy为点(x,y)上第i个高斯分布的均值,σi,xy为点(x,y)上第i个高斯个的历史分布的标准差。各个高斯分布按照出现的频率进行排序,每个像素点上历史数据符合某个高斯模型的频率越多,这个高斯分布越可能属于背景。通常选取优先级较大的几个高斯分布组合成背景模型:
(3)
γ为阈值,当点(x,y)上某一时刻值满足该点背景模型中的任何一个高斯背景,即可认定该点为背景。混合高斯模型的K的值通常取3-5个,当背景相对稳定时,K取值1-2个模型即可,当背景变化较为频繁时,K取值3-5个或者更多。
混合高斯模型首先利用视频的第一幅图,以该图的值作为均值,赋予一定的方差和权值,建立第一个高斯分布。此后下一帧图像用同样的方法建立第二、第三个高斯模型,当模型数量达到K个以后,新图像创建一个新的高斯分布,替代原来优先级低的那个高斯分布,均值、方差、权限均进行更新。
混合高斯模型能够模拟复杂的背景,能够有效地抑制动态背景对目标检测的影响,缺点是收敛速度慢,容易产生虚警点,对亮度的突然变化比较敏感,每个像素需要建立多个高斯分布,存储量相对较大,降低了实施性,对速度相对较慢的运动目标检测效果较差,容易识别为背景。
3 时空域背景检测
针对混合高斯模型检测背景的缺点,可以通过基于像素的时域信息和空域信息的检测法进行背景判断。对于判断图像中一个像素点是否为背景,在时域和空域上基于背景变化平缓假设,即背景中任意一点在时域上不会存在大的跳变,或者在空域上没有大的跳变, 前后图像灰度上存在一定的相关性。因此利用前后帧图像信号之间的相关性可以将目标和背景区别开。当没有目标运动时,前后帧相同像素区域信号之间存在很强的相关性,当有目标在像素点周围运动时,由于前后帧灰度之间发生了变化,信号之间的相关性相比之前,大大降低,如果设定一个阈值,当相关性大于该阈值,则认定为背景,反之为目标。
假设点(i,j)的时域信号为fr(i,j,k),其8邻域像素点时域信号为fr(i+m,j+n,k),(m,n,k=-1,0,1),令fr(i,j,k)=ak,fr(i+m,j+n,k)=bk,两像素点间时域信号的相关系数为:


根据上述描述,可以将算法步骤归纳如下:
(1)在当前帧取大小为3×3的滑动窗口,以点(i,j)作为中心取出窗口图像。
(2)按图1所示沿着8个相邻像素的方向,分别进行窗口滑动,并进行时域信号相关检测。
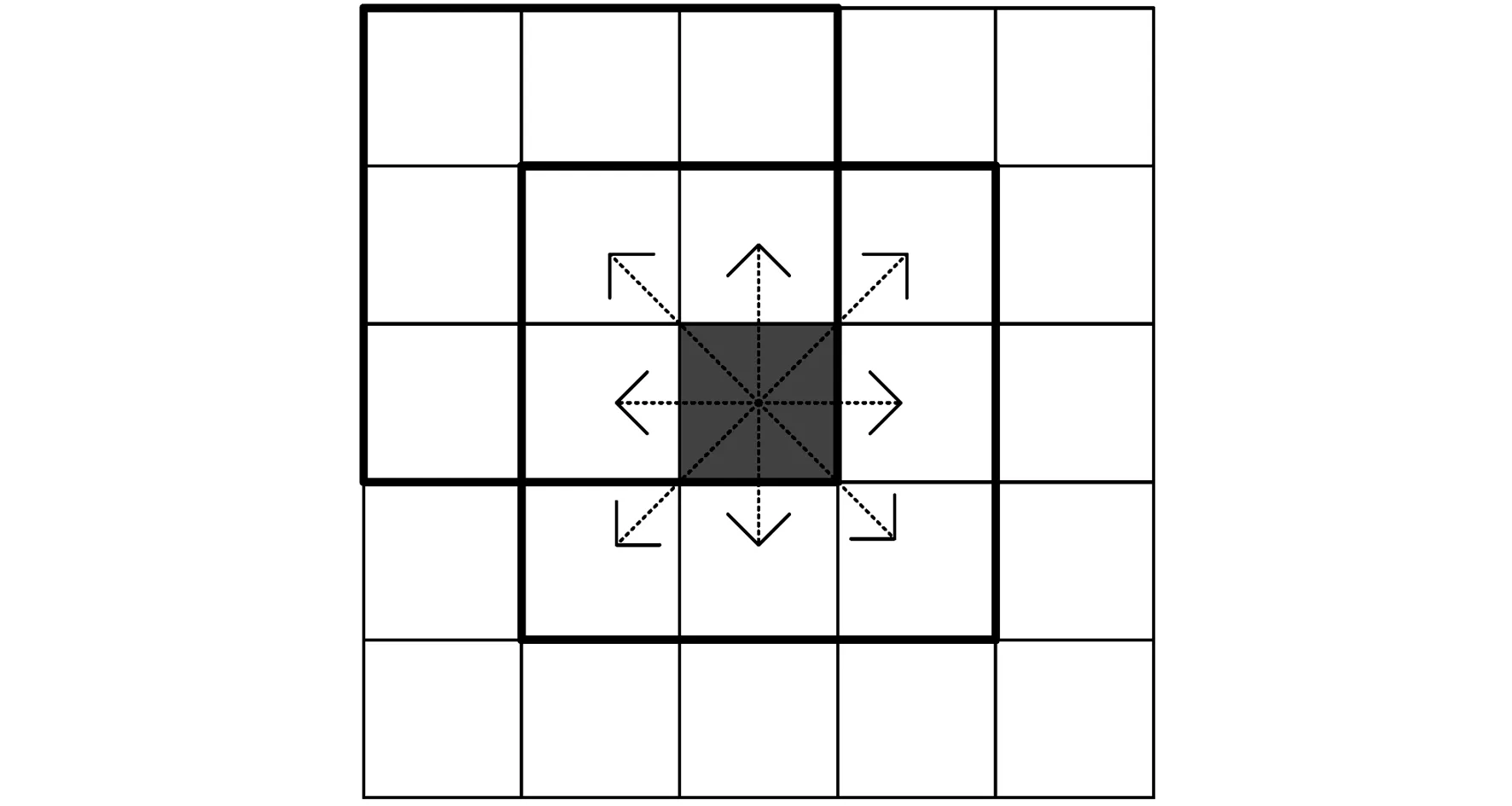
图1 时空域目标检测搜索示意图
(3)依据OSTU确定相关性门限。
(4)依据相关性确定点(i,j)为目标以及目标的运动轨迹。
(5)将将时域窗口移动至K+1帧,释放上一时间窗口的首帧,循环以上步骤完成目标检测。
4 实验与分析
为了验证目标检测效果,本文对江面监测图像序列进行目标检测,检测的背景为江面(图2.a),检测目标为江面行驶的船只(图2.b)。分别采用单高斯模型、混合高斯模型、时空域目标检测算法进行运动目标检测验证。图3.a、图3.b、图3.c分别为上述三种算法进行目标检测的结果。

(a) 背景图像 (b) 船只航行图像图2 背景及目标运动图像

(a) 单高斯模型 (b) 混合高斯模型 (c) 时空域目标检测图3 三种目标检测算法对比
从检测结果中不难看出,由于江面起伏的随机性,导致监控画面中江面的图像灰度起伏不定,背景变化较大,采用单高斯模型目标检测的结果较差,江面的噪声点较多,对船只的检测效果一般,存在很多空洞。相比较单高斯模型,多高斯模型在江面检测上有了较大的进步,噪声点明显变少,船艏部分检测效果较好,但船艉部分也存在较多空洞。检测效果最好的为时空域目标检测算法,江面噪声点几乎没有,船只的检测连续,基本消除了空洞。
5 结 论
在混合高斯模型的基础上提出了一种基于空间信息的运动目标检测方法。利用了像素及其周围区域,以及前后帧局部图像的相关性,对运动目标进行检测。通过实验,时空域目标检测算法能够有效的降低复杂噪声对目标检测带来的影响。
1 Kanade Takeo,Collins R T,Lipton Alan J,et al.A system for video surveillance and monitoring CMU VSAM final report[R].Carnegie Mellon University,2000.
2 Kim J B,Kim H J.Efficient region-based motion segmentation for video monitoring systerm[J].Pattern Recognition Letters,2003,24:113-128.
3 Collins R T,Lipton A J.Introduction to the special section on video surveillance[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2000,22(8):745-746.
4 Strings E,Regazzoni C S.Real-time video-shot detection for scene applications[J].IEEE Transactions on Image Processing,2000,9(1):6 979-6 982.
5 David A S.Optical flow analysis and kalman filter tracking in video surveillance algorithms[D].Monterey:Duke University,2006.
6 Li L,Huang W M,Gu Y H,et al.Foreground Object Detection from Videos Containing Complex Background[J].ACM Multimedia conf,Berkeley,USA,2003:358-362.
7 郑江滨,张艳宁,冯大金,等.视频监视中运动目标的检测与跟踪算法[J].系统工程与电子技术,2002,10(24):35-38.
8 杨威,张田文.复杂景物环境下运动目标检测的新方法[J].计算机研究与发展,1998,35(8):724-728.
9 万磊,白洪亮,戴军. 扩展的Otsu最优阈值图像分割的实现方法[J].哈尔滨工程大学学报,2003, 24(3):326-329.
(责任编辑:谭银元)
AMovingObjectDetectionMethodBringingTogetherSpatio-temporalDomainBackgroundSeparation
LVJin-hua1,JIANGHan-hong2,JIANGChun-liang2
(1. Wuhan Institute of Shipbuilding Technology, Wuhan, 430050, 2.College of Electrical Engineering Naval University of Engineering, Wuhan, 430033,China)
Amoving object detection method bringing together spatio-temporal domain background separation is proposedto solve the problem that single time domain Gauss model tends to be influenced by illumination and noise in object detection as the single identification methodonly withtime or spacedomain has its limitation respectively.In this method, the difference between the moving object in space domain and time domain is analyzed, some related coefficient difference is used to determine the threshold through the minimum internal difference method. The experiment proves that this method, under complex background such as illumination mutation, can effectively eliminate the influence of illumination,noiseand other factors, and achievequick detection of a moving object.
moving object detection; spatio-temporal domain
2017-01-26
吕金华,男,副教授,主要从事自动控制理论方面的教学和科研工作。
TP39
A
1671-8100(2017)02-0031-03
猜你喜欢
数字通信世界(2021年3期)2021-04-09 02:05:00
军民两用技术与产品(2021年10期)2021-03-16 06:05:22
湖北理工学院学报(2020年4期)2020-08-22 06:43:26
测控技术(2018年11期)2018-12-07 05:49:02
计算机应用与软件(2017年4期)2017-04-24 10:39:07
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
西南交通大学学报(2016年4期)2016-06-15 20:29:36
海峡科技与产业(2016年3期)2016-05-17 04:32:11
中国农业文摘-农业工程(2016年5期)2016-04-12 05:38:14
西北工业大学学报(2015年4期)2016-01-19 03:31:55
