基于PLC系统的双容水箱液位控制*
2017-09-22 09:49张晓莉杜文玉王毅璇
网络安全与数据管理 2017年17期
张晓莉,杜文玉,王毅璇,董 岩,张 钟
(1. 华北计算机系统工程研究所,北京 100083; 2. 最高人民检察院,北京 100726)
基于PLC系统的双容水箱液位控制*
张晓莉1,杜文玉2,王毅璇1,董 岩1,张 钟1
(1. 华北计算机系统工程研究所,北京 100083; 2. 最高人民检察院,北京 100726)
以PLC系统为工具,实现了双容水箱液位控制。在对水箱模型进行数学分析的基础上,除常规PID控制方法之外,增加了分段控制和PID自整定等优化措施,达到快速且稳定的控制效果。实际控制效果表明,此方案可极大地提升控制品质。此项目的实施验证了该PLC系统可在实际应用中满足实时性、可靠性与易用性的要求。
PLC;双容水箱;液位控制;PID;自整定
0 引言
液位控制系统具有非线性、大时滞的特点,是过程控制中一种典型的控制对象。采用传统PID进行控制时,往往超调量大、响应时间长,控制效果不理想。许多先进的控制方案,例如专家系统、机器学习等,都需基于一定的数据存储空间,或大规模的数学计算,在嵌入式领域应用困难。
本文以PLC系统为工具,在对控制对象进行模型分析的基础上,采用分段控制与PID自整定技术,实现了对二阶双容水箱液位的实时控制。
1 控制方案
1.1控制模型
本文中PLC系统的控制对象是双容水箱液位,模型如图1所示。通过设置左侧抽水泵的占空比,调节进入左侧水箱的流量,从而影响水箱内的液位;两个水箱的液位差使水在连通处流动;同时右侧水箱以一定的速度往外排水。用户对右水箱输入液位目标值,控制逻辑应能够使右水箱的水位达到并稳定在此目标值。在有扰动产生时(如目标值改变,右水箱的排水速率发生变动),控制逻辑可快速响应,使系统重新回归稳定状态。
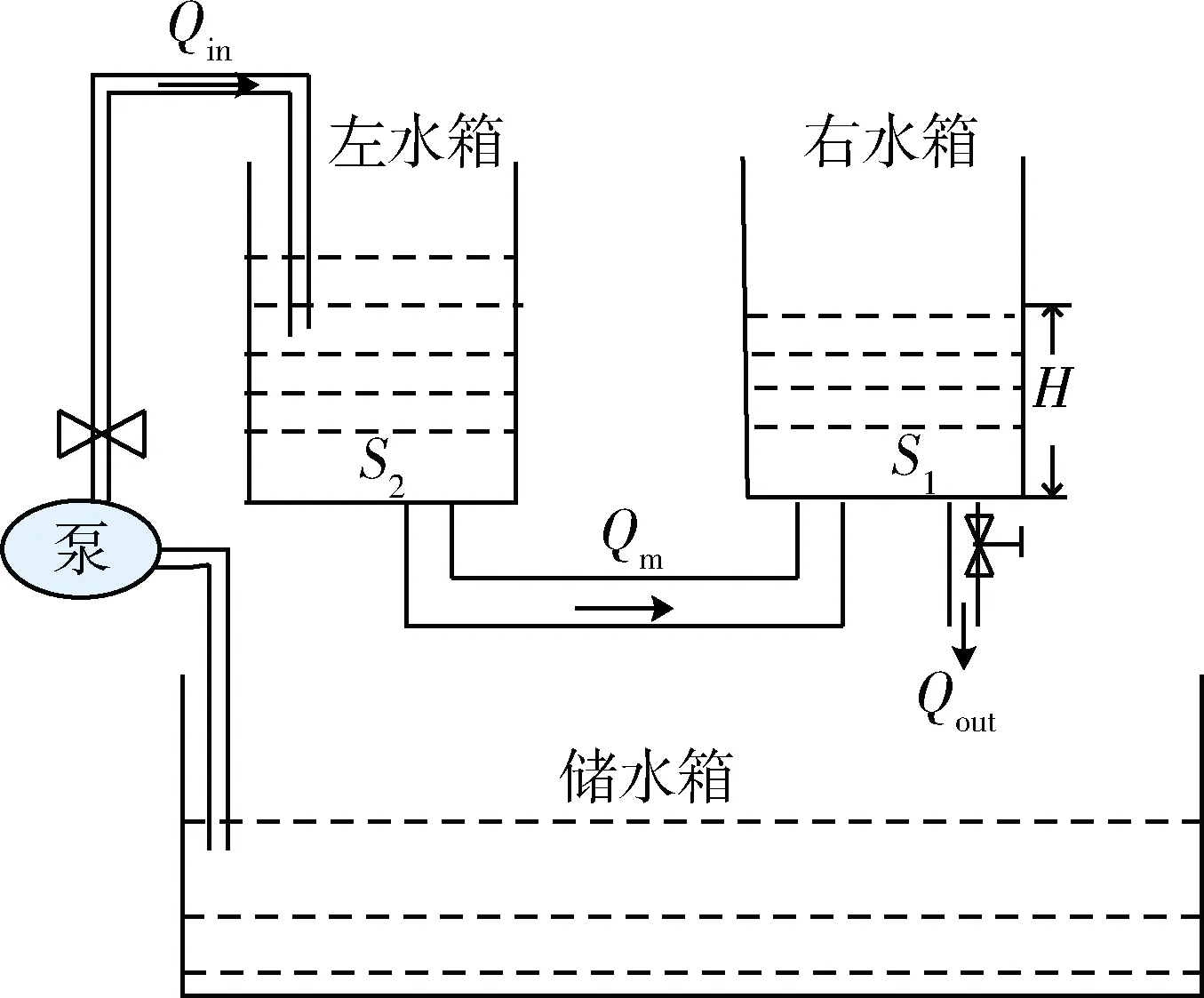
图1 双容水箱模型
1.2常规控制
1.2.1 PID控制
图1所示的双容水箱模型,有两个输入参数:用户设置的目标液位值以及右水箱的实际液位值;有一个可控的输出参数:泵的占空比。这是典型的闭环反馈控制案例,采用PID控制是最常见的方法。
双容水箱的常规PID控制策略如图2所示。
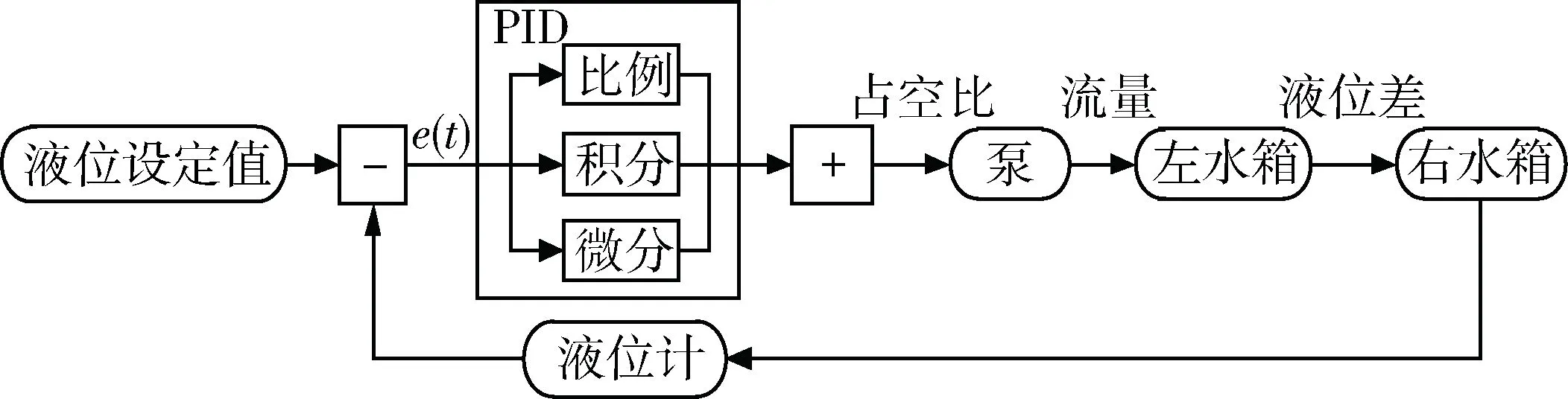
图2 液位PID控制策略
利用右水箱液位设定值与液位计测量得到的实际值相减,得到偏差值,经过PID计算后控制泵的占空比。如果是开关泵,可通过PWM模块产生相应占空比的脉冲,微秒级地控制泵的启停。如果是变频泵,可利用计算结果直接设置泵的运行频率。
由于双容水箱属于二阶惯性对象,具有一定的滞后性,而实验用的泵功率有限,所以此方案在实际控制的过程中,虽然常规的控制方法也可以完成控制目的,但过程耗时较长,振荡范围大。
针对这类大时滞的控制对象,也通常会在设定值与控制输出之间寻找中间对象,采用串级PID的方式进一步提升控制效果。
为了达到更好的控制效果,本文设计并实现了优化控制方法。
1.2.2数学模型控制
除了PID控制这种适应性很广的方案,基于对控制对象的数学建模与参数求解,是一种具有很强针对性的方案。
根据系统的动态平衡原理,分析两侧水箱的进出水,可建立以下方程组:
(1)
其中,S1、S2分别表示左、右水箱的底面积;H1、H2分别表示左、右水箱的液位值;Qin表示系统的入水流量;Qm表示两水箱之间连通处的流量;Qout表示右水箱的排水流量。
由流体力学知识可知,液位高度与出水流量的关系可表示为:

(2)
其中系数k与出口阀开度等有关。将式(2)代入方程组(1),可得式(3):
(3)
其中函数f表示此泵频率与流量的线性转换函数:
f(μ)=a·μ+b
(4)
可通过查阅设备说明书或实验确定参数a与b,参数k1、k2也可通过若干次实验,然后采用最小二乘法工具确定其数值。
泵的频率参数μ是具体实施时采用的控制策略,根据两侧液位值计算得到泵此时应处在怎样的频率下运行,可表示为液位值的函数。
若用户设置的右水箱液位目标值为x0,并希望在此点达到平衡。则此系统的控制目标可表达为:
(5)
将式(5)代入方程组(3)可解出此平衡点附近左水箱液位和泵的频率应满足:
(6)
基于数学模型的控制,优点是具有确定性,缺点是过于依赖模型的准确度。即使在调试时对模型进行了精确的整定,若设备或环境在运行过程中发生变化,例如设备在运行过程中发生了磨损、排水阀的开度发生了变化,则原本控制策略可能会无法达到预期的应用效果。所以在实际应用时,会在分析对象模型的基础上,结合一些自适应的手段来实现控制目标。
1.3优化控制
PID控制应用方便,适应性良好,但是实际控制效果取决于P、I、D参数的选择,所以与调试者的能力和经验有很大关系。
进一步地分析对象模型与控制手段之间的关联,细分控制阶段和控制策略是一种途径;使用先进控制手段来实现PID参数的自动整定是另一种有效途径。本文将两种方法做了结合的实践。
1.3.1分段控制
首先,在传统水箱模型(图1)的基础上,增加了一个液位计测量左水箱液位。利用左右水箱的两个液位值使控制者可以对控制对象有深入的掌握,从而通过改进控制策略来加快响应速度。在两个水箱的液位值均已知的基础上,可以估算出两个水箱中总的水容量,判断此刻系统水容量是否接近所需总量。以此为依据可将整个控制流程分成两个阶段:
(1) 全速阶段
在左右水箱的液位和小于设定液位的两倍时,意味着水箱里的液体总和没有达到所需要的值,此时输出的指令不需经过PID计算,直接设置让泵全速运转,如图3所示。
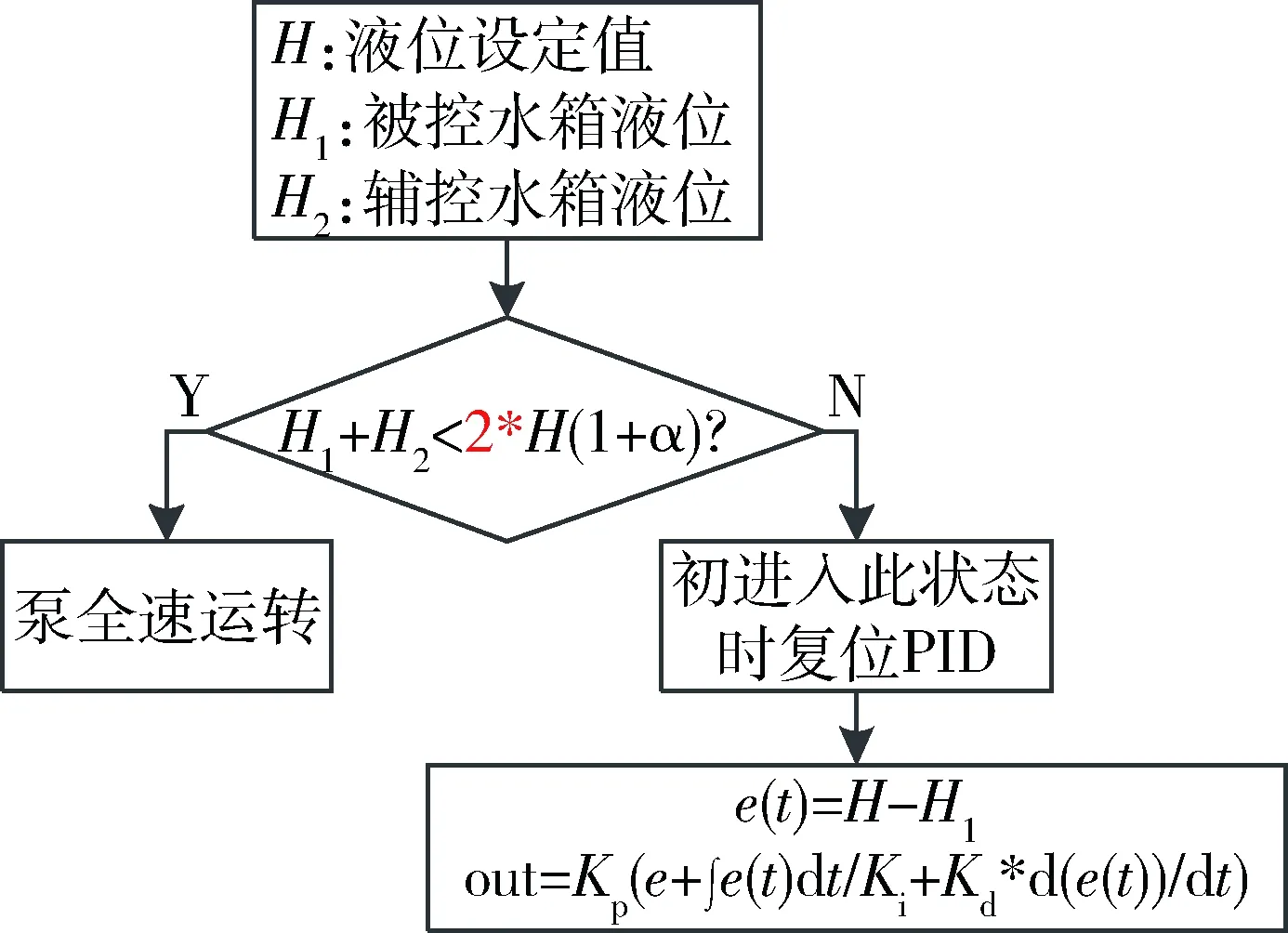
图3 分段控制流程图
(2) 微调阶段
微调阶段仍采用常规控制方案,根据设定值与实际值的偏差,计算出泵的占空比,控制入水流量。
在判断状态切换时,增加了参数α,目标是从泵不再全速运行而采用PID控制开始,直到左右水箱液位达到平衡为止,系统的总排水量大致趋近于2Hα,即右水箱液位只需在设定值H附近进行微调即可。实际使用中α可根据连通管道的位置和宽度、往外排水阀门开度、PID参数等进行适当调整。本项目投运时,此参数设定为0.15。
1.3.2 PID自整定
基于阶跃辨识对象模型方法,是给设定值一个阶跃,观察对象的响应曲线确定提取特征值,然后根据模型特征参数计算出合适的PID参数。这种方式要求有一个较大的阶跃,且易受噪声干扰。Astrom提出基于继电反馈的理论,基本思路是在继电反馈下观测过程的极限环振荡,然后由极限环的特征值来确定过程的基本性质,继而计算出PID调节器的参数[1-4]。这种方法避免了阶跃辨识的一次性尝试,使用同一阶跃反复若干次交互和反馈,可减少噪声对结果的影响,也可降低阶跃所需的幅度。
在微调阶段,P、I、D参数起了重要的作用。所以在本实验系统的实施过程中,利用PLC系统内置算法库,实现了继电整定过程。修改之后的控制方案如图4所示。

图4 自整定控制方案
在整定阶段,泵的占空比不由PID控制,而由测试模块直接给定。例如在占空比50%时投入整定,记录此时的液位为Ha,设继电器幅值d为40%,则继电器模块的功能是:
当液位小于Ha时,设置泵的占空比为50%+40%=90%;
当液位大于Ha时,设置泵的占空比为50%-40%=10%;
经过几个周期的适应,可观察到液位反馈曲线呈现规律的周期振荡环,如图5所示。
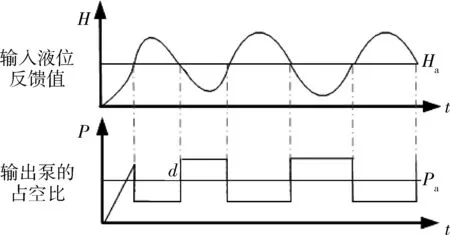
图5 继电反馈测试信号
形成周期振荡环之后,再根据采集得到的历史数据,计算出此振荡环的幅值A和周期Tu。将控制过程使用傅里叶级数展开,可见振荡幅值A能被认为是继电输出的一次谐波分量的作用结果,因此临界增益就能被近似为:

(7)
其中d为继电的幅度,A是液位反馈周期振荡的幅值[4]。
然后按经验公式换算出相应的PID参数,转换方式有很多,常用的是Z-N经验公式,如表1[5]。也可根据实际应用的需求选择不同的参数。例如在某些应用场合要求无超调,有时要求累积误差最小、响应时间最短等。
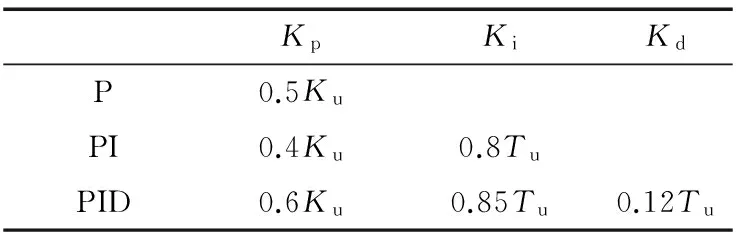
表1 Z-N经验公式
2 实践效果
本文使用新研发的PLC系统完成了项目实施,其中采用的硬件模块包括控制器模块、DI、DO、AI、PWM等,其中采用了双控制器模块的冗余配置以提高系统可靠性。整体集成效果图如图6所示。

图6 集成效果图
经过软硬件的调试配合,项目投运后,取得了较好的控制效果。实际控制曲线如图7所示,其中三条曲线的含义分别为:①-液位设定值;②-左水箱液位值;③-右水箱液位值。
曲线分为三个阶段:
(1) 全速阶段,由于系统内液体总量偏少,泵以100%

图7 控制效果曲线
负荷运转,此阶段所需时间长度完全取决于泵的功率,无法通过算法改进;
(2) 微调阶段,使用PID自整定得到的参数进行控制,可看出几乎无超调,且最大误差不超过5%;
(3) 扰动阶段,设定值发生了从7~10的阶跃变化,被控对象也能快速且稳定地响应变化。
从实际控制过程曲线可以看出,此方案满足了快速响应、平稳控制的需求。
3 结论
本文在对控制对象进一步分析的基础上,根据其特性将控制过程分成若干阶段,然后有针对性地使用不同控制手段,最后使用PID自整定理论与经验公式,计算出适合控制对象的参数。本文使用的控制策略可在以水箱液位为代表的多阶对象上取得理想的应用效果。
[1] ASTROM K J, HAGGLUND T. PID controllers: theory design and tuning[M]. Instrument Society of America, 1995.
[2] ASTROM K J, HAGGLUND T. Automatic tuning of simple regulators with specification on phase and amplitude margins[J]. Automatica, 1984,20(5):645-651.
[3] HANG C C, ASTROM K J, HO W K. Relay auto-tuning in the presence of static load disturbance[J]. Automatica, 1993,29(2):563-564.
[4] 陈叶. 基于DCS平台PID参数自整定算法研究及软件包开发[D]. 杭州:浙江大学,2007.
[5] 曹刚. PID控制器参数整定方法及其应用研究[D]. 杭州:浙江大学,2004.
Double-tank water level control based on PLC system
Zhang Xiaoli1, Du Wenyu2, Wang Yixuan1, Dong Yan1, Zhang Zhong1
(1. National Computer System Engineering Research Institute of China, Beijing 100083, China;2. The Supreme People’s Procuratorate, Beijing 100726, China)
This paper takes PLC system as a tool to control the liquid level of the double-tank water system. In addition to the regular PID control method, this project also fulfills some optimize methods, such as the phase control and auto-tuning PID, so as to control it rapidly and steadily. The actual control results show that this scheme can greatly improve the quality of control. This project proves this PLC system can achieve the requirements of real-time, reliability and usability.
PLC; two-tank water system; level control; PID; auto tuning
核高基重大专项(2017ZX01030202)
TP273
:A
10.19358/j.issn.1674- 7720.2017.17.001
张晓莉,杜文玉,王毅璇,等.基于PLC系统的双容水箱液位控制[J].微型机与应用,2017,36(17):1-3,7.
2017-05-01)
张晓莉(1985-),女,硕士,工程师,主要研究方向:工业控制算法、嵌入系统信息安全。杜文玉(1984-),男,硕士,高级工程师,主要研究方向:信息化建设与国产化。王毅璇(1984-),女,硕士,工程师,主要研究方向:工控上位机软件、计算机网络。
猜你喜欢
石油工业技术监督(2022年7期)2022-08-18
湖北农机化(2021年7期)2021-12-07
天津教育·下(2018年9期)2018-07-13
自动化仪表(2017年8期)2017-08-30
自动化仪表(2015年5期)2015-06-15
汽车维修与保养(2015年6期)2015-04-17
质量技术监督研究(2015年1期)2015-04-09
汽车维护与修理(2015年2期)2015-02-28
自动化博览(2014年12期)2014-02-28
探测与控制学报(2012年1期)2012-08-27