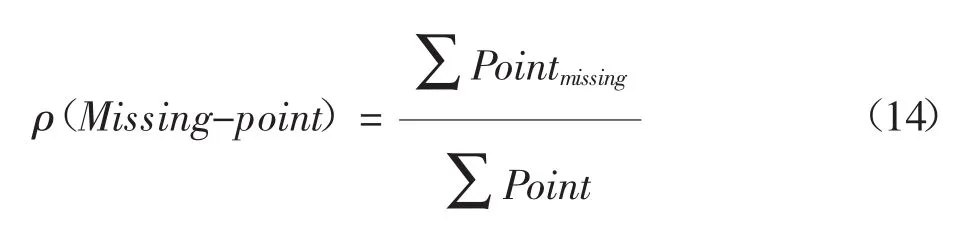
基于实测ADS-B数据的地面站覆盖性分析
2017-09-19 16:34:14白宇骏
中国民航大学学报 2017年4期
白宇骏
(中国民用航空华东地区空中交通管理局,上海 200335)
基于实测ADS-B数据的地面站覆盖性分析
白宇骏
(中国民用航空华东地区空中交通管理局,上海 200335)
根据ADS-B地面站覆盖范围的需要,考虑地形遮蔽、地球曲率、顶空盲区及设备性能等因素,计算了ADSB地面站的理论覆盖范围。基于ADS-B数据,采用Lambert投影方法,提出了一种凹包生成算法;依据实测数据计算不同高度层的ADS-B覆盖图,提出一种ADS-B连续性计算方法,并计算漏点率和连续性等级。结果表明,该方法能够提供地形遮蔽影响下的理论最大覆盖范围,可用于辅助ADS-B地面站的选址决策。
ADS-B;覆盖范围;Lambert投影方法;凹包生成算法
广播式自动相关监视技术(ADS-B,automatic dependent surveillance-broadcast)是一种能够自动对外界广播飞行信息的新一代监视系统。相比传统的监视设备,ADS-B设备重量轻、安装方便、维护费用低、电磁污染少、更新速率快,不仅可以使空中交通的安全等级得到提高,运行效率得到优化,空域容量得到增加,还能够使监视空域范围得以扩大。作为安全、经济、高效的新一代监视设备,有极大的发展前景。中国民用航空ADS-B实施规划提出,2016—2020年要实现中国范围内全空域ADS-B OUT的全面运行。并计划在这5年内完成386个ADS-B地面站新建工程,实现航线、航路及运输机场的监视覆盖。而ADS-B地面站的覆盖范围需考虑地形遮蔽、地球曲率、顶空盲区及设备性能等一系列因素,以实现最优覆盖效果。因此,为实现良好的空域覆盖并满足监视性能的相关标准,对ADS-B地面站覆盖性的研究分析十分必要。
国内外学者对ADS-B地面站的理论覆盖范围进行了研究。焦卫东等[1]通过设计ADS-B规范标准的天气模型,获得了天线空间辐射场的增益数据,在此基础上,根据信号自由空间传输距离、视距传输距离、遮蔽角导致的视距截止距离的计算结果,并结合地理高程数据,得出基站的信号覆盖情况,表明地形对ADSB基站信号的传播影响非常明显。刘文评等[2]提出一种针对不规则地形的ADS-B地面站信息覆盖分析方法,并通过实验表明,不规则地形是影响地面站覆盖的关键因素,Longley-Rice模型可以准确模拟信号衰减。沈笑云等[3]提出一种针对开阔区域ADS-B地面站信号覆盖分析方法,并做了相关实验,结果表明,开阔区域地表反射是影响地面站覆盖的关键因素,二径模型可以准确模拟信号衰减。骆敏华等[4]借鉴国内外相关的ADS-B测试评估方案,对上海浦东国际机场及其周边各个航路的不同高度层和特定区域的ADS-B信号进行了大量测试,根据实际接收的信号质量综合决策现场有效覆盖区初步评估结果。Kostic等[5]介绍了虚拟三维地理信息系统(GIS)中的雷达覆盖预测与可视化。Boci等[6]概述了用于设计和构建无线电站点布局的射频(RF)覆盖分析方法,以支持美国联邦航空管理局(FAA)的ADS-B空中交通现代化计划。
基于ADS-B数据,采用Lambert投影方法,将采集的ADS-B数据中的航迹点等信息投影到以ADS-B地面站为原点的平面坐标系中,利用凹包生成算法,依据给定高度层上的实测ADS-B航迹计算不同高度层的ADS-B覆盖图。在给定高度层下,通过ADS-B连续性计算,依据漏点率结果确定连续性等级,得到不同连续性级别的ADS-B信号在航段上的分布覆盖结果。
1 ADS-B地面站理论覆盖范围计算
ADS-B地面站的覆盖半径不仅受到机载ADS-B发射机信号最大辐射距离的限制,还受地球曲率的影响。ADS-B信号以空间波形式传播,即视距传播:电波沿视线直接传播到接收点。因此在建立ADS-B地面站覆盖模型时有必要考虑地形遮蔽对ADS-B信号的影响。基于ADS-B通讯链的传播特点,当有障碍物(如山峰、丘陵等)存在于电波的传输路径上时,机载ADS-B发射器所发出的信号就无法被地面站接收到,形成一个信号盲区。如图1所示,沿ADS-B地面站接收天线与障碍物顶端做一条射线,该射线与水平面夹角为θ2,这时在山峰后面会形成一个盲区,当飞机的下滑角小于θ2时,其机载ADS-B发射器所发出的信号无法被地面站接收到。
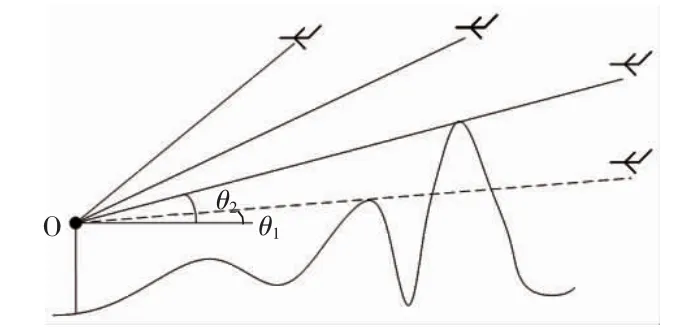
图1 仰角对覆盖盲区的影响Fig.1 Influence of elevation angle on coverage blind zone
遮蔽角是指障碍物顶点和地面站天线之间的连线与地平线之间的夹角,即

其中:ht为地表某点的海拔高度;ds为地表某点与地面站的斜距;hr为地面站天线高度;Re为等效地球半径(这里取Re=8 496 km)。将{θi}的最大值作为基准遮蔽角θ0。实际应用中需对遮蔽角加入修正因子,即

其中:λ为ADS-B系统工作波长;dsmax为基准遮蔽角对应的斜距。将遮蔽角的相应DEM网格点可视信息储存起来,作为视点与目标点是否通视的判定依据之一。
所得修正遮蔽角可用于计算不同方位ADS-B的视线截止距离,即

进一步计算该遮蔽角下某高度层H0上的ADS-B信号的视线截止距离,如图2所示,即

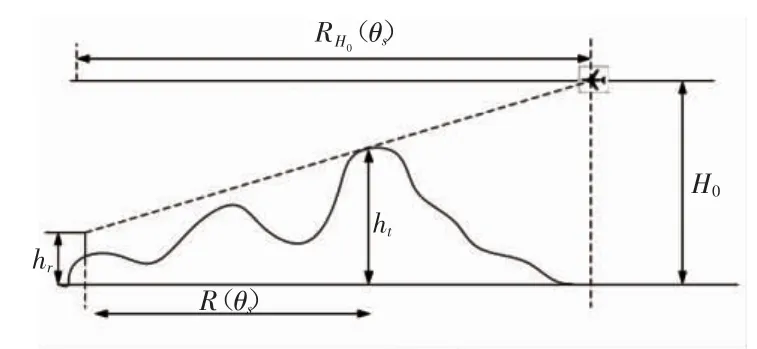
图2 遮蔽角计算模型Fig.2 Calculation model of defilade angle
根据视线截止距离所形成的一系列视线截止点,将所有方向上的视线截止点拟合成一条封闭曲线,则该曲线所形成的区域即为ADS-B的实际覆盖范围。
2 ADS-B地面站实际覆盖范围计算
通过采集不同高度的ADS-B航迹点,并将航路点采用Lambert投影方式投影至平面,计算投影平面上航路点的最小凹包,由此得到ADS-B地面站在不同高度层上的覆盖范围。
2.1 ADS-B航迹投影方法
如图3所示,Lambert投影是一种等角圆锥投影,设想用一个正圆锥割于球面两标准纬线,应用等角条件将地球面投影到圆锥面上,然后沿一母线展开,即为Lambert投影平面。Lambert等角投影后纬线为同心圆弧,经线为同心圆半径。
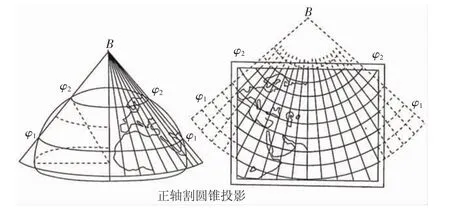
图3 Lambert投影Fig.3 Lambert projection
以图幅的原点经线L0(一般是图幅中央经线)作纵坐标x轴(向北为正),原点经线L0与原点纬线B0(一般是图幅最南端纬线)的交点作为原点O,过此点的切线作为横坐标y轴(向东为正),构成Lambert平面直角坐标系,如图4所示。
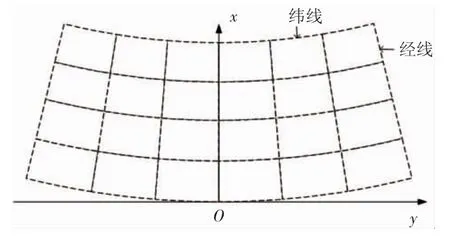
图4 平面直角系坐标Fig.4 Lambert coordinate system
将地理坐标(Bd,Ld)转化为Lambert投影下的平面坐标(xd,yd),Lambert等角投影正解公式为
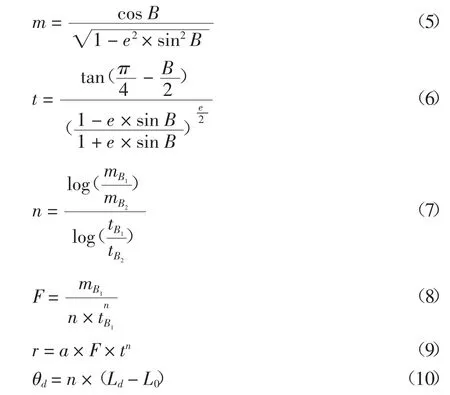
纵坐标为

横坐标为

其中:a为地球长半轴;e为第一偏心率;B1为第一标准纬线纬度;B2为第二标准纬线纬度;r0为原点维度处的 r值;rd为 Bd纬度处的 r值;mB1、mB2分别为标准纬线B1和 B2处的m 值;tB1、tB2分别为标准纬线 B1和 B2处的t值。
2.2 ADS-B航迹覆盖范围凹包
依据给定高度层上的实测ADS-B航迹计算不同高度层的ADS-B覆盖图。即基于步骤2中得到的给定高度层上所有ADS-B航迹点在平面上的投影坐标,计算信号覆盖凹包,如图5所示。
凹包计算步骤如下:
步骤1首先以ADS-B地面站为原点O(xd,yd),将水平面分为n个扇区,因此每个扇区的夹角为2π/n。
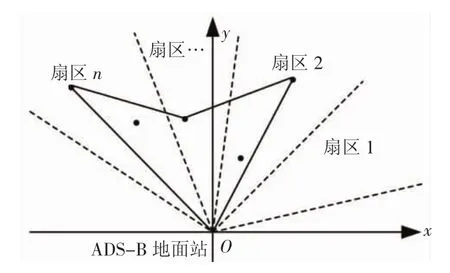
图5 凹包生成算法示意图Fig.5 Diagram of concave hull algorithm
步骤2对于每个ADS-B航迹点Pi在平面上的投影坐标(xd,yd),计算向量 OPi与 x轴的夹角,即
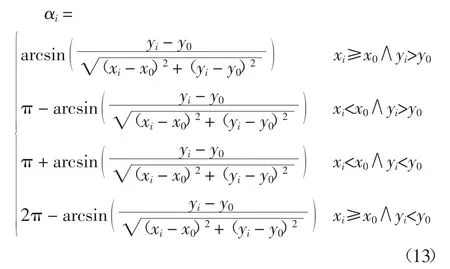
步骤3计算第k个扇区中包含的航迹点集合Sk,对于每个ADS-B航迹点Pi,判断向量OPi是否位于扇区 k,判断依据为(k+1)2π/n > αi≥ k2π/ni。
步骤4若第k个扇区中包含的航迹点集合Sk不为空,则计算点集Sk中距离ADS-B地面站最远的航迹点 Pk,即任意反之,若Sk为空,则令该扇区离ADS-B地面站最远的航迹点为P0。
步骤5将每个扇区离ADS-B地面站最远的航迹点构成多边形,所得凹多边形即为覆盖所有航迹点的凹包。
3 ADS-B信号连续性在航段上的分布
3.1 ADS-B信号连续性的计算
在正常情况下为了保证缩小航空器间隔和运行的安全性,ADS-B的更新时间间隔应为0.5~2 s。但无论如何,在计算正确的情况下,每1 s都应该有位置报文信息的存在。基于这样的原理可以判定,只要每1 s有位置报文,则认为报文不存在漏点,假若某1 s没有位置报文,则判定报文数据丢失,认为报文存在1次漏点,连续多秒不存在报文数据,则判定ADS-B多个报文数据丢失,判定为多个漏点。
首先将ADS-B的漏点数初始化为0,然后在一段时间间隔内提取某架飞机的ADS-B报文数据,如果连续m个系统周期内未收到航迹点,则认为ADSB探测出现漏点,并为ADS-B漏点数加m,否则继续提取数据,直到时间间隔结束。最后根据情况有
3.2 ADS-B信号连续性在航段上的分布
给定高度层下,通过ADS-B信号连续性计算,依据漏点率结果确定连续性等级,得到不同连续性级别的ADS-B信号在航段上的分布覆盖结果。按民航划分的飞行高度层,将不同高度层上航班的ADS-B实测数据进行分类,并根据距离误差和角度误差准则将ADS-B实测数据匹配到对应的航路。某航空器的ADS-B实测数据输出位置为Pi(xi,yi),直线航段两端的坐标分别为 A(xa,ya)、B(xb,yb)。可求得 ADS-B 实测数据到航段的距离为
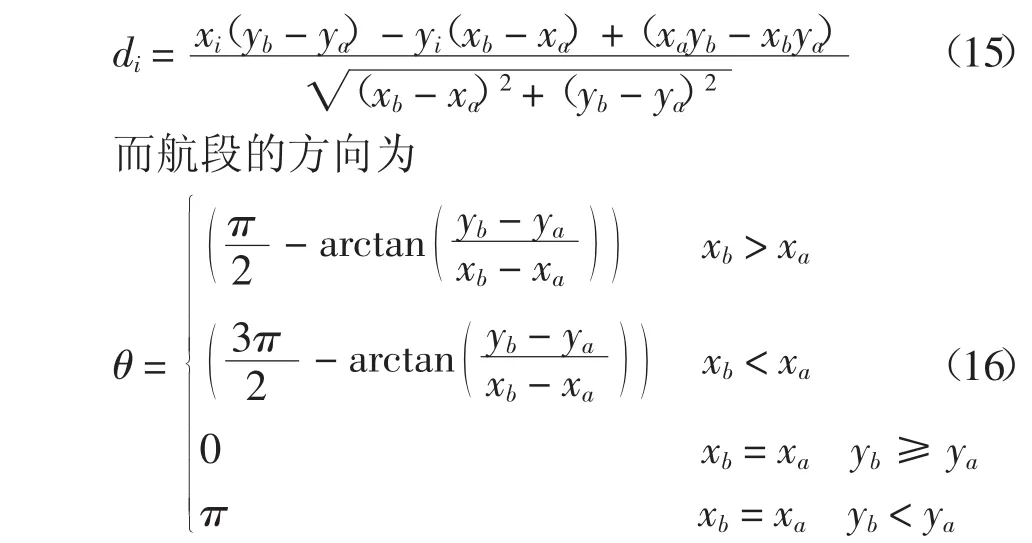
假设ADS-B实测数据的航迹角为φi,则ADS-B实测数据与航段的夹角为

当ADS-B实测数据到航段的距离di≤δ,且ADS-B实测数据与航段的夹角Δθi≤α时,该数据匹配到该航段,否则不能匹配到该航段,其中δ与α为给定的阈值。
对上述分段航路,统计在一段时间间隔内,该航段上所有航空器出现的漏点数,依据ADS-B信号连续性计算原理,通过漏点率结果确定连续性等级。选定任意一架航空器,连续m秒内未收到航迹点,则判断为ADS-B的航迹漏点,上述航段上所有航空器出现的漏点数,根据漏点率计算公式得到丢失点百分比计算结果。依据事先设置的连续性等级辨别表,判断不同航段上漏点率所处的范围,确定该航段的连续性等级,得到给定高度层下不同连续性级别的航段在航路上的分布,如表1所示。
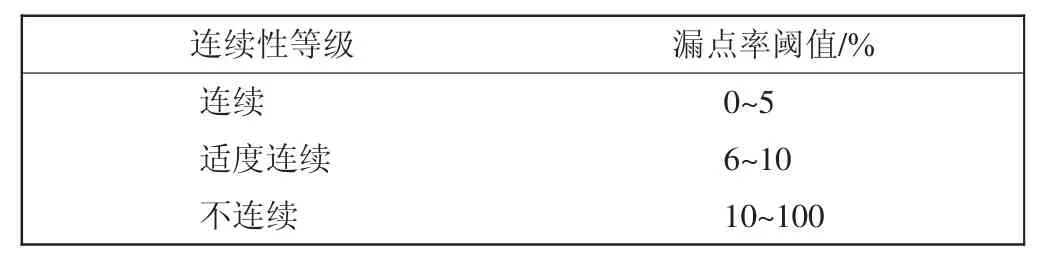
表1 连续性等级判别表Tab.1 Continuity grade
4 案例研究
为验证本文所提方法的正确性,以南京某ADS-B地面站获取的数据为例进行分析,该ADS-B地面站天线所处位置为:东经118.786 111°、北纬31.939 167°、高度50 m。采集2017年3月22日上午9:00—12:00的航迹数据,在NASA World Wind地理信息系统平台上开发了ADS-B地面站覆盖性分析软件,结果如图6~图8所示。

图6 ADS-B地面站5 400 m高度理论覆盖范围Fig.6 Theoretical coverage of ADS-B station atheight of 5 400 m
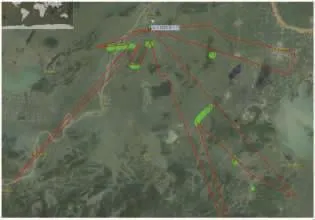
图7 ADS-B地面站5 400 m高度实际覆盖范围凹包及ADS-B航迹连续性分布图Fig.7 Concave hull of actual coverage of ADS-B station at height of 5400 m and ADS-B track continuity

图8 ADS-B地面站5 400 m高度理论覆盖范围与实际覆盖范围凹包叠加结果Fig.8 Concave hull overlap of theoretical coverage and actual coverage of ADS-B station at height of 5 400 m
图6所示为ADS-B地面站5 400 m高度理论覆盖范围,其中圆形区域为仅考虑地球曲率影响下的理论最大覆盖范围,而多边形区域为考虑地形遮蔽影响下的理论最大覆盖范围。该结果可用于辅助ADS-B地面站的选址决策。
图7所示为将空域分为60个扇区后ADS-B地面站5 400 m高度实际覆盖范围凹包,该凹包可用于ADS-B运行阶段,为判断航空器是否即将飞出ADS-B地面站覆盖范围提供依据。
图8所示为ADS-B地面站5 400 m高度考虑地形遮蔽因素时理论覆盖范围与实际覆盖范围凹包叠加结果。从图中可以看出,ADS-B实际数据的最远距离验证了ADS-B理论覆盖模型的结果,但由于实际ADS-B数据较少,二者覆盖的区域差别较大,需要进一步增加实测数据来提高实际覆盖范围的精确性。
5 结语
考虑地形遮蔽、地球曲率及设备性能对ADS-B地面站覆盖范围的影响,以南京某ADS-B地面站为例计算了ADS-B地面站的理论覆盖范围,测得不同高度层下ADS-B的实测覆盖图,计算并匹配得到不同连续性级别的ADS-B信号在航段上的分布覆盖结果。该研究可为ADS-B地面站的选址和运行辅助决策提供有效的依据和支持。
[1]焦卫东,周 波,沈笑云.ADS-B地面站信号覆盖分析及选址应用[J].计算机仿真,2014,31(4):51-55.
[2]刘文评,曹 博,刘志刚,等.不规则地形对ADS-B地面站信号覆盖影响分析[J].电光与控制,2016(6):84-89.
[3]沈笑云,曹 博,张思远,等.开阔区域ADS-B地面站信号覆盖仿真分析[J].计算机仿真,2015,32(3):94-99.
[4]骆敏华,周禄华,毛 建.浦东ADS-B覆盖测试与分析方法研究[J].网络安全技术与应用,2015(6):115-116.
[5]KOSTIC A,RANCIC D.Radar Coverage Analysis in Virtual GIS Environment[C]//TELSIKS 6th International Conference on Telecommunications in Modern Satellite,Cable and Broadcasting Service,IEEE,Serbia and Montenegro,2003:721-724.
[6]BOCI E,SARKANI S,MAZZUCHI T.Optimizing ADS-B RF Coverage[C]//Integrated Communications,Navigation&Surveillance Conference,Arlington,VA,USA,2009:1-10.
(责任编辑:刘佩佩)
Coverage analysis on ADS-B station based on measured data
BAI Yujun
(East China Regional Air Traffic Management Bureau of Civil Aviation of China,Shanghai 200335,China)
According to the factors such as topography,earth curvature,headspace blind zone and equipment performance,theoretical coverage of ADS-B ground station is calculated.Based on ADS-B data,Lambert projection method is used to project the generation algorithm of concave hull.Based on measured data,the coverage of ADS-B under different layers of height is calculated.An ADS-B continuity calculation method is proposed to calculate the leakage rate and continuity level.Results show that the proposed method can provide theoretical maximum coverage under the influence of terrain shelter and can be used to assist ADS-B ground station’s location decision.
ADS-B;coverage;Lambert projection method;generation algorithm of concave hull
V243
:A
:1674-5590(2017)04-0011-05
2017-04-15;
:2017-05-23
:中国民用航空局空中交通管理局科技项目(KJ1506)
白宇骏(1975—),男,广东清远人,工程师,工学博士,研究方向为空管通信导航监视设备规划与运行管理.
猜你喜欢
航空工程进展(2019年5期)2019-11-05 02:32:08
重庆交通大学学报(自然科学版)(2018年8期)2018-07-30 10:12:22
电脑与电信(2018年11期)2018-02-16 05:41:24
职工法律天地·下半月(2016年9期)2016-11-30 09:48:18
电子制作(2016年23期)2016-05-17 03:54:06
大社会(2016年5期)2016-05-04 03:41:45
科技视界(2016年9期)2016-04-26 09:14:10
中国民航大学学报(2014年3期)2014-11-27 02:03:00
中国民航大学学报(2014年5期)2014-03-14 03:36:30
新华月报·下(2008年3期)2008-03-24 01:17:34