单框架控制力矩陀螺低速特性分析
2017-09-15 07:17:39陈海鹏宋敬群李皓伟
哈尔滨商业大学学报(自然科学版) 2017年4期
林 臻,陈海鹏,宋敬群,李皓伟,林 云
(1. 北京宇航系统工程研究所,北京 100076;2.哈尔滨工程大学 信息与通信工程学院,哈尔滨 150001 )
单框架控制力矩陀螺低速特性分析
林 臻1,陈海鹏1,宋敬群1,李皓伟1,林 云2
(1. 北京宇航系统工程研究所,北京 100076;2.哈尔滨工程大学 信息与通信工程学院,哈尔滨 150001 )
单框架控制力矩陀螺是我国进行外层空间探索的关键技术,由于它输出力矩范围大,控制精度高,经常应用于大型机动卫星以及空间站的姿态调整中,单框架控制力矩陀螺对低速性能要求很高,研究了框架伺服系统的低速特性,主要包括摩擦力矩对伺服系统的影响.并且针对单框架控制力矩陀螺系统在位置环中进行了设计和仿真.实践证明该文讨论的设计方法的正确和有效.
短单框架控制力矩陀螺;低速特性;摩擦
单框架控制力矩陀螺框架伺服系统对低速性能[1-3]要求很高.伺服系统的低速性能是指系统工作在速度很低的情况下能否保持平稳或者出现脉动的情况.这种性能可以在速度曲线和位置曲线上得到体现.影响本系统的低速特性的因素以下几个方面[4-5]:
1)测角系统的分辨率和控制系统的采样和量化的分辨率,D/A的分辨率.对数字控制系统而言,当速度低到一定的程度时,由于给定信号是数字量,只能以一个角度分辨率台阶式的跳变.
2)系统的摩擦力矩,包括静、动摩擦力矩的差值以及Stribeck摩擦.
3)其他的干扰力矩,如电机的力矩波动等.
4)系统的参数,主要是系统的刚度与阻尼系数.
本文主要从摩擦力矩对低速性能的影响入手,计算出最低平稳速度,并做出计算机仿真,为单框架控制力矩陀螺的的研制提供参考.
1 摩擦力矩对伺服控制系统低速特性的影响
单框架控制力矩陀螺框架轴系存在很大的摩擦力矩[6](带消隙齿轮者更甚),摩擦力矩将给框架伺服系统的控制带来很大的困难.以带有测速反馈的简单伺服系统[7-8]为例,讨论摩擦干扰力矩对低速平稳性的影响. 摩擦模型采用简单的静摩擦+库仑摩擦模型[9-10],解析式表达如下:
其中:M1为静摩擦力,M2为库仑摩擦力.
图1为带有测速反馈的简单伺服系统的方框图.
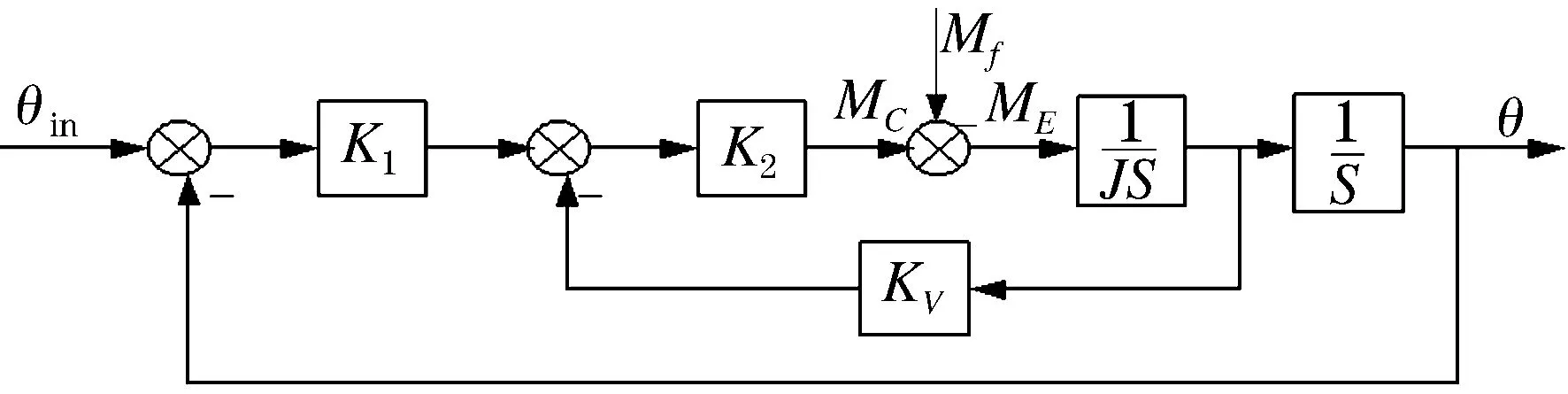
图1 带有测速反馈的伺服控制系统方框图
K1和K2为放大系数;KV为测速反馈系数.
给系统加入信号θin(t),其中θin(t)=at,a=const.电机在输入信号θin(t)作用下产生力矩为M(t),则电机运动的三个力矩方程为:
制动状态方程:
启动状态方程:

运动状态方程:
有:

对上式进行拉氏反变换,得到


表1ωmin(ξ)和ξ的关系表

ξ0.10.20.40.50.60.70.80.9ωmin(ξ)(°/s)0.6170.3680.1080.01780.01780.00460.555×10-30.625×10-5
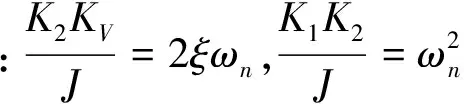
由表1可见,ξ越大,ωmin越小.当ΔM,J,ωn为确定值时,则β确定,ωmin=βωmin(ξ)即为系统的最低平稳速度.
如果J,ωn和β为确定值时,ΔM与ωmin呈线性关系.显然ΔM越小,ωmin越小.对框架伺服控制系统而言,在原理样机可以测量的参数值如下:
J=0.25 kg·m2,ΔM为5 N·m.在假设ωn=10 Hz的情况下,可以计算出β=2,最低平稳速度的参考值可由表1得到.
因此为了得到系统的最低平稳速度,一是减小动静摩擦之差,二是提高系统的阻尼系数.如果校正环节采用其他的方式,系统输出含有高频分量.但是这样的分析给我们定性的启示,采用合适的串联或者并联校正改善系统的阻尼;采用机械手段降低摩擦都可以降低最低平稳速度.
同时,需要指出的是,由于模型的精度低,这里所用的计算方法在实际系统的调试中仅具有数量级上的参考意义.
2 系统仿真结果
系统采用直流无刷力矩电机带动转轴运动,包括电流环、速度环和位置环三环控制.为简化讨论,系统的电流环和速度环的设计在这里略去,直接引用结果[11].位置环的作用是保证位置系统精度.位置环的动、静态指标直接决定了系统的最低平稳速度.对位置环进行计算机仿真,以验证前述的理论推导结果.
2. 1位置环设计
摩擦部分采用简单的静摩擦+库仑摩擦模型.根据实际测量,静摩擦为10 N·m,估计动摩擦为8N·m.系统摩擦主要来源于轴承,如何克服大摩擦干扰,取得良好的低速性能是位置环设计的关键.
取位置环的带宽为10 Hz.
在SGCMG框架伺服控制系统中,系统要求调速范围大,速率平稳性要求高.而且由于滚珠轴承以及无刷直流力矩电机定位力矩造成的系统综合摩擦力矩很大,对良好的低速控制性能将造成很大的影响[12].因此在数字PID控制器中采用改进的PID技术.
1)对积分项的改进
积分环节的作用主要是消除静差,提高控制精度.在SGCMG框架伺服控制系统中,数字控制器的输出uk受到元件的约束,如果uk超出元件约束范围,将于预计结果不相符,引起饱和效应.在电机启动、停车或者速率范围变化比较大的时候,输出的控制量将变化很大,饱和效应将引起系统振荡或者调节时间延长等后果.
传统的积分项的改进方法是在大偏差时取消积分项,用PD控制.但是针对SGCMG系统的摩擦力矩很大,单纯的PD控制难以取得良好的抗干扰效果,需要加入积分项加强控制作用.因此根据误差量的大小合理的选择积分速度,既发挥积分项克服摩擦扰动消除静差的作用,又减小积分项最动态性能的破坏.
改进的积分项采用分段积分方法,将误差量分段,在每一段内采取固定的积分常数.其表达式如下:

其中β为衰减系数.
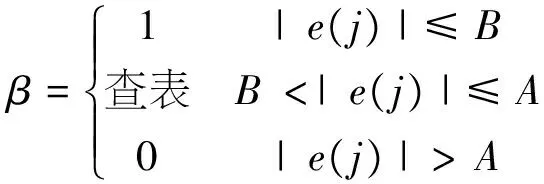
其中参数β,A,B需要根据实际系统运行状况调试决定.
2)对微分项的改进
3)变参数控制
SGCMG框架伺服控制系统的调速范围很大,在不同的速率下,摩擦特性对系统的影响是不同的,一组PID参数很难做到在整个调速范围内的良好控制性能.因此,针对不同的速度信号,可以现场调试不同的PID参数.
2.2仿真结果
选取PID参数KP=1 200,TI=0.01 s,TD=1 s,Tf=0.001 s,针对斜坡输入信号进行系统仿真.
1)对0.1 rad/s的斜坡输入信号位置环响应如图2所示.通过局部放大图可以看到系统没有稳态误差,没有出现爬行.
2)对0.000 1 rad/s的斜坡输入信号位置环响应如图3所示.通过局部放大图可以看到系统没有稳态误差,没有出现爬行.
3)在更低的0.000 01 rad/s速度信号下,系统出现爬行,如图4所示.在实际系统中,这样的速率范围已经达到要求.
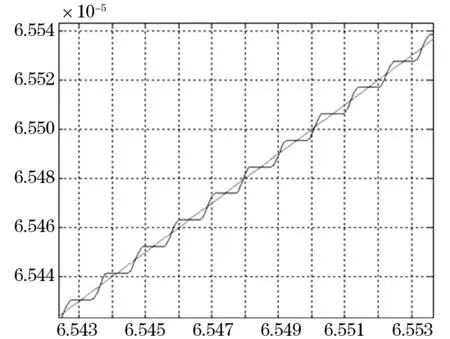
图2 0.1rad/s位置环响应
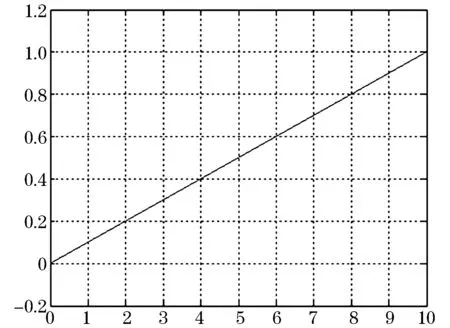
图3 0.000 1rad/s位置环响应
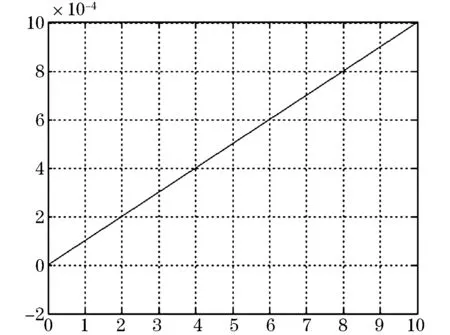
图4 0.0000 1rad/s位置环响应
3 工程实际情况分析
前述理论分析针对的是简化摩擦模型和简化的带有速度环的反馈系统,前述仿真也仅仅是在具有理想摩擦模型情况下的仿真.根据原理样机项目经验,在单框架控制力矩陀螺系统中,带有减速齿轮环节所引起的摩擦特性是相当复杂的,是一种与位置有关的带有随机性质的现象,并且系统的低速特性还与电机控制和系统控制参数有关.针对这样的系统如何进行高精度控制,在工程样机项目中采用的技术包括以下几个方面.
1)精确的调节减速齿轮的消隙结构,实际经验证明恰当的消隙结构能大幅度的减小摩擦力矩;
2)在电机控制中采用正弦波驱动方案,减小换相影响;
3)减小电机定位力矩影响;
4)提高系统刚度和阻尼系数.
4 结 语
单框架控制力矩陀螺对低速性能要求很高,本文研究了框架伺服系统的低速特性,主要包括摩擦力矩对伺服系统的影响.并且针对单框架控制力矩陀螺系统在位置环中进行了设计和仿真.实践证明该文讨论的设计方法的正确和有效.
[1] 金 磊, 徐世杰. SGCMG框架伺服系统动力学建模与低速控制[J]. 中国空间科学技术, 2010, 30(6): 1-10.
[2] 鲁 明, 李耀华, 张激扬, 等. 控制力矩陀螺框架伺服系统的超低速测速方法[J]. 中国惯性技术学报, 2012, 20(2): 234-238.
[3] 刘宝玉, 金 磊, 贾英宏. 谐波齿轮对大型SGCMG框架转速控制的影响分析[J]. 航天控制, 2014, 32(2): 23-28.
[4] 孙丹峰, 申友涛, 周华俊. 单框架控制力矩陀螺框架伺服系统扰动因素分析[C]//高分辨率对地观测学术年会.北京: 2013.
[5] 曾庆双, 秦嘉川. 转台伺服系统低速性能分析[J]. 中国惯性技术学报, 2001, 9(2): 64-69.
[6] 吴 忠, 吴宏鑫. SGCMG框架伺服系统扰动力矩的分析与抑制[J]. 航天控制, 1998, 4: 9-18.
[7] 李 宁, 眭法川. 一种新的锁相测速方法[J]. 工业仪表与自动化装置, 2003(6): 12-14.
[8] 刘植桢, 何克忠. 提高伺服系统快速性的探讨[J]. 清华大学学报:自然科学版, 1980(1): 99-109.
[9] 章仁为. 静止卫星的轨道和姿态控制[M]. 北京: 北京航空航天大学出版社, 1987.
[10] 章仁为. 卫星轨道姿态动力学与控制[M]. 北京: 北京航空航天大学出版社, 1998.
[11] 汪木兰, 顾绳谷. 无刷直流力矩电机驱动高性能伺服系统研究[J]. 电气传动, 2001, 31(3):23-25.
[12] 陆 骏, 杨建国, 任瑞荣. 基于数字PID控制器的伺服控制系统[J]. 科技创新导报, 2009(26): 82-82.
Lowvelocitycharacteristicanalysisinsinglegimbalcontrolmomentgyroscope
LIN Zhen1, CHEN Hai-peng1, SONG Jing-qun1, LI Hao-wei1, LIN Yun2
(1. Beijing Aerospace System Engineering Institute, Beijing 100076, China; 2. School of Information and Communication Engineering, Harbin Engineering University, Harbin 150001, China)
Single gimbal control moment gyroscope (SGCMG) is the key technique of exploring the deep space. Due to the large output torque and high control precision, SGCMG is widely used in the attitude control on large maneuvering satellite and apace station. Low velocity characteristic is the key demand of SGCMG. In this paper, low velocity characteristic analysis was investigated, consisting of influence of friction moment to servo system. The improved PID control method was also provided and simulated in position loop. It could be demonstrated by engineering practice that the method provided in this paper was correct and effective.
single gimbal control moment gyroscope; low velocity; friction
2016-12-12.
国家自然科学基金项目(61301095)
林 臻(1986-),男,硕士,工程师,研究方向:电气设计.
V241
:A
1672-0946(2017)04-0488-04
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
学生天地(2019年6期)2019-03-07 01:10:46
军事文摘(2018年24期)2018-12-26 00:58:18
测控技术(2018年12期)2018-11-25 09:37:44
快乐语文(2018年36期)2018-03-12 00:56:02
山东青年(2016年12期)2017-03-02 18:22:48
光学精密工程(2016年6期)2016-11-07 09:08:02
航天制造技术(2016年6期)2016-05-09 08:32:51
北京航空航天大学学报(2016年4期)2016-02-27 06:32:11