智能施肥机的设计
2017-09-14 06:48滨州学院电气工程学院李宏俊贾荣丛
电子世界 2017年17期
滨州学院电气工程学院 李宏俊 贾荣丛
智能施肥机的设计
滨州学院电气工程学院 李宏俊 贾荣丛
我国为农业较发达国家,人均占有的耕地面积不足,化肥施用存在很大的问题,因此我国应尽快发展精细农业,特别是变量施肥技术。本文提出了智能施肥机的设计方案,以单片机为控制核心,步进电动机为执行机构的智能施肥机的控制体系。本控制系统主要是单片机输出变频脉冲信号改变步进电机转速,进而改变排肥器排肥速度,最终实现智能施肥的目标,提高了化肥使用效率,提供更加高效的施肥方法。
精细农业;智能施肥;单片机;步进电动机
1 引言
智能施肥技术在中国的发展还处于不成熟阶段,然而在外国却有很多地区开始使用了,我国的智能施肥技术发展还不成熟的原因在于粮食产量的充足忽视了智能施肥的重要性。我国目前的施肥方式除了秸秆还田等可持续的施肥方法外,主要的施肥方法仍然是以人工抛洒的方式进行,不仅占用了大量的劳动力,而且对我国耕地造成盐碱化,结块化的影响[1]。人工施肥不能很好的控制施肥量,过量的施用化肥会对土地和水源造成极大的污染。结合国外先进的智能施肥机研究经验以及国内的施肥现状,研发适宜本国国情的智能施肥技术已经是刻不容缓。
2 智能施肥机的结构及工作原理
2.1 施肥机结构
机具主要由机具住架、浮动仿形机构、开沟器、播种单体、排肥器、步进电机、地轮、机具速度传感器和单片机控制系统等组成,结构如图1所示。
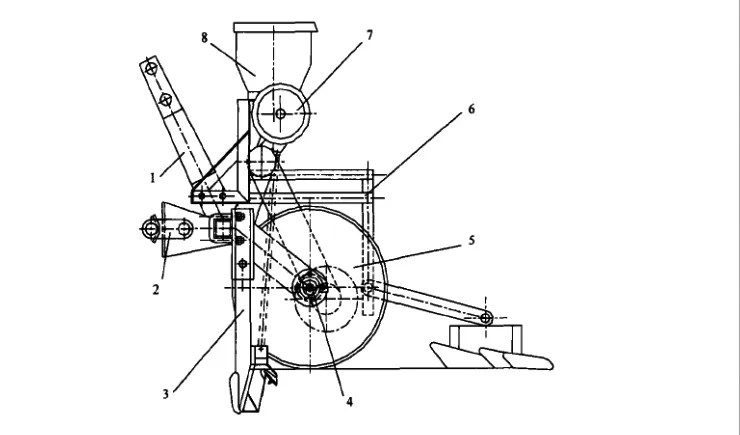
图1 手动智能施肥机结构简图
2.2 系统设计方案
本文主要研究智能施肥技术的四个方面:以单片机为核心的智能施肥系统,步进电动机的速度控制系统,机具速度传感器以及BCD拨码盘输入。机具速度传感器是用来收集机具前进速度。基于单片机的控制系统是施肥机的控制中心,步进电动机是施肥机的执行机构,BCD拨码盘作为施肥量的输入机构。本文采用的编程语言为C语言,核心控制器选用AT89系列单片机。单片机通过速度传感器获得施肥机的实时前进速度,单片机结合施肥量以及肥料箱剩余肥料发出变频脉冲改变步进电动机转速从而改变施肥机实时排肥量,达到智能施肥的目的。在目前来说,现代控制理论中的控制方式有很多,例如自适应控制、模糊控制、切换控制等好多类。因为本论文采用步进电机作为执行机构,且步进电动机的驱动要求较低,所以本文最终选择开环控制。系统控制框图如图2所示。
该系统要求施肥量由BCD拨码盘输入到单片机,单片机发出变频脉冲改变步进电动机转速从而改变施肥机实时排肥量,达到智能施肥的目的。
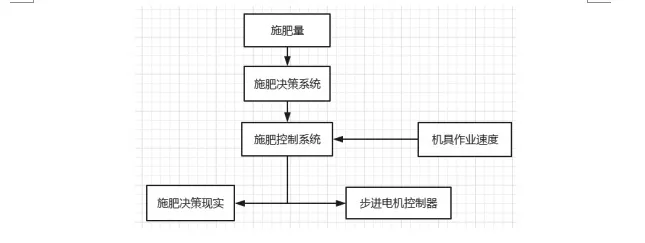
图2 系统控制框图
3 软件设计
单片机内的应用系统软件主要上采用顺序结构的设计方法,一步一步设计出智能施肥机的控制程序。控制程序由主程序和中断服务程序组成,整个程序由C语言编写。根据控制系统要达到的要求,制定每一步程序应达到的要求,并设计中断服务程序,设置中断优先级。控制流程图如图3所示。
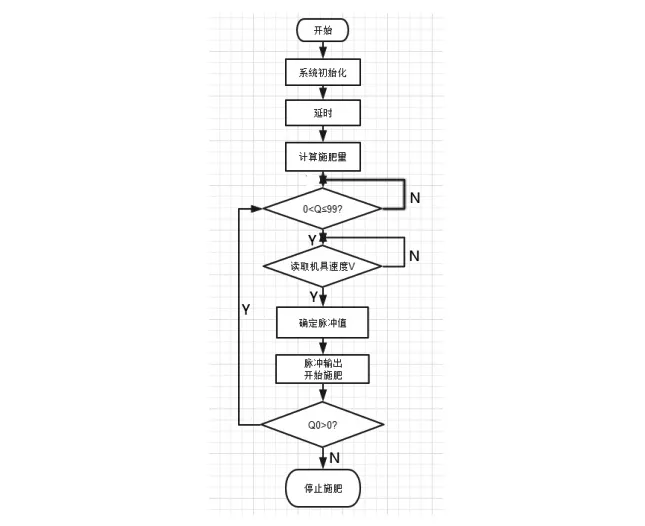
图3 程序流程图
4 结论
本文以单片机为控制核心、步进电动机为执行机构设计了一款智能施肥机。本次设计中用户通过拨码盘的输入以及从速度传感器的信号输入给单片机从而实现对步进电动机的控制,最终实现控制整个施肥机的目标,从而达到对肥料的节约以及肥料播撒的均匀度,从而提高了化肥使用效率。
[1]郭树满.智能控制变量施肥技术的研究[D].河南农业大学,2006.
[2]齐虎春.3S技术在精细农业中的应用及发展[J].农村牧区机械化,2011(03).
[3]董克强,王智辉.精准农业——未来农业发展的趋势[J].民营科技,2012(04).
[4]梁文甲,胡晓丽,陈艳辉,袁洪印.步进电机智能施肥系统及施肥方案研究[J].安徽农业科学,2012(31).
[5]马旭,马成林,桑国旗,庄俭.变量施肥机具的设计[J].农业机械学报,2005(01).
[6]吴舟,邓芳.基于WCDMA网络的农业大棚智能监控系统的设计与实现[J].科技创新与应用,2012(34).
国家级大学生创新训练计划项目:智能施肥机器人的设计(项目编号:201610449076)。
猜你喜欢
现代农村科技(2022年9期)2022-08-16
机械设计与制造(2022年4期)2022-04-28
农业工程学报(2022年1期)2022-03-25
装备维修技术(2021年42期)2021-03-15
科技视界(2019年11期)2019-06-20
新疆农机化(2015年4期)2015-03-10
湖南有色金属(2014年3期)2014-07-02
湖南农业科学(2014年20期)2014-02-27
湖南农业科学(2014年8期)2014-02-27
湖南农业科学(2014年5期)2014-02-27