基于Modelica的纯电动客车建模仿真研究*
2017-09-12 01:23程雷秦东晨王耀凯王迎佳
汽车技术 2017年8期
程雷 秦东晨 王耀凯 王迎佳
(郑州大学,郑州 450001)
基于Modelica的纯电动客车建模仿真研究*
程雷 秦东晨 王耀凯 王迎佳
(郑州大学,郑州 450001)
为实现纯电动客车多领域统一建模与仿真分析,采用模块化划分方法对纯电动客车进行了结构划分,利用面向对象的多领域物理系统一建模语言Modelica构建了纯电动客车动力系统主要部件模型、底盘总成核心机械部件模型及整车控制模型。参照某城市公交车设置仿真模型参数,对纯电动客车多领域模型的综合性能进行了标准工况下的跟随性仿真与分析。结果表明,所建立的纯电动客车模型具有良好的跟随性,且动力性和经济性与参照公交车基本一致。
1 前言
纯电动汽车是一个涉及机械、电子、液压、控制等多个领域的复杂物理系统[1],在其研究与开发过程中,广泛采用Advisor、Cruise、PAST和HEVC等软件进行建模与仿真,但这些软件只侧重于单个部件或单一系统的建模与仿真,很难实现多领域统一建模与仿真,因此在对整车进行建模与仿真时,大多采取多个软件建模后再进行联合仿真的方法,这将导致仿真结果与实际结果偏差较大[2]。目前,多领域统一建模与仿真技术得到了快速发展,如逐渐发展成熟的多领域统一建模语言Modelica已应用于航空、航天、船舶、车辆等各行各业[3],基于Mod⁃elica建立的模型库已经囊括了电学、车辆动力学、热动力学以及模糊控制等诸多领域[4],为实现纯电动汽车的统一建模与仿真提供了基础。
本文以纯电动客车为研究对象,采用Modelica建模语言分别建立纯电动客车的动力电池、永磁同步电机、机械系统部件、控制器等各系统模型及整车仿真模型,并参照某城市纯电动公交车的实际运营情况设置仿真参数,在MWorks仿真平台中对所建整车模型进行了标准试验工况及特定城市工况下的跟随性仿真分析,通过仿真结果验证了所建模型的正确性。
2 纯电动客车结构及模块划分
2.1 结构分析
纯电动客车以电池为动力系统的能量来源,采用电动机进行动力驱动,通过电池管理系统((Battery Man⁃agement System,BMS)和电机控制器实现电能与机械能的能量转化和信息传递[5],以满足整车的动力需求。纯电动客车的悬架、制动系统等底盘机械部件与传统客车基本相同;对于纯电动客车的整车控制,是通过CAN控制总线及各通讯串口来实现各子系统信息的交换与控制。纯电动客车结构(简化)如图1所示。

图1 纯电动客车结构(简化)示意
2.2 模块划分
依据纯电动客车各系统所属学科领域的不同,采用模块化划分的方法将整车划分为动力系统模块、机械部件模块、控制模块及其它附件模块,如图2所示。其中,动力系统模块包括动力电池、驱动电动机;机械部件模块包括轮胎、悬架、制动系等底盘总成部件;控制模块主要包括BMS、电机控制系统等;附件模块包括道路、环境等。

图2 电动客车模块划分结果
3 动力系统模型
3.1 电池模型
目前,电池模型主要包括等效电路模型、电化学模型、神经网络模型等,其中等效电路模型以电池充、放电的工作原理为基础,能够准确地模拟出电池工作时的基本特性。现有的等效电路模型如Thevenin电池模型、PNGV电池模型、GNL电池模型中,PNGV电池模型更贴近实际[6],其电路方程推导如下:

荷电状态方程为:

式中,SOC0为电池SOC的初始值;C0为电池额定电量。
考虑到电池放电过程中的极化现象、热效应等对电池电压、电流及SOC值的影响,基于电池的PNGV电路方程和Modelica的电学基础库Electrical中的电器组件,建立如图3所示的电池单体模型。
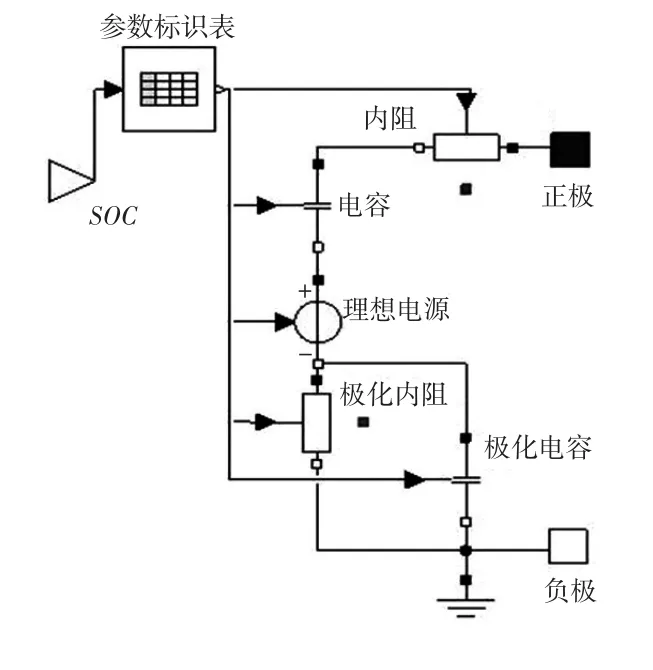
图3 电池单体的等效电路模型
在该电池单体模型中,各可变组件的参数值通过参数表进行参数标识,电池的SOC值通过对电路模型中电流数值积分计算获得。在建立了电池单体的PNGV等效电路模型后,通过Modelica标准库中Gain组件进行电池单体的串/并联构成电池组,并建立控制总线(Control⁃Bus)接口的子控制总线(BatteryControlBus),进行封装后得到具有基本管理系统的完整电池箱。
3.2 电动机模型
目前,纯电动客车所使用的电动机主要有异步电机、永磁同步电机和开关磁阻电机等3种类型[7],其中永磁同步电机因具有较高的能量密度和效率以及较宽的调速范围而被广泛应用[8],所以本文采用Modelica标准库中的永磁同步电机作为驱动电机模型本体,并根据永磁同步电动机的逆变器、控制器等部件的物理结构,进一步构建出电动机的DC/AC逆变器模型、矢量控制(FOC)模型等,得到永磁同步电机及控制器模型,如图4所示。
4 机械部件与控制模型
4.1 轮胎模型
轮胎模型采用被广泛认可的“魔术公式(MagicFor⁃mula)”轮胎特性模型,也就是荷兰Delft理工大学H B Pacejka教授所描述的HBPacejka轮胎模型[9],该模型利用一套形式相同的函数方程描述轮胎在不同行驶状态下的纵向力、侧向力以及回正力矩,其方程如下:


图4 永磁同步电机及控制器模型
式(4)中,对应于轮胎在行驶状态下受到的纵向力、侧向力以及回正力矩等不同情况,Y()X可分别代表侧向力、纵向力与回正力矩,X则可以代表轮胎的纵向滑移率或侧偏角;B为刚度因子;C为y曲线形状因子;D为巅因子。表示y曲线的最大值;E为y曲线的曲率因子;SV、Sh分别为车轮垂直方向和水平方向的偏移量。
根据“魔术公式”所描述的轮胎特性方程,将组件Revolute(转动副)、BodyShape(‘体’形状)、WorldForce(相对力)、Torque(绝对力矩)、WorldTorque(相对力矩)等通过方程建立关系,构建轮胎模型如图5所示。

图5 轮胎模型
4.2 悬架模型
在建立悬架模型时,依据悬架系统结构的拓扑关系,采用Modelica的机械基础库Mechanics中的基本组件,按照悬架结构的层次关系[10]先建立双横臂独立悬架1/2的双横臂独立悬架模型,然后根据悬架在纵向平面上的对称性,通过坐标对称的方法得到整个双横臂悬架模型并进行编译和求解,所建悬架模型如图6所示。

图6 悬架多体模型
4.3 制动器模型
客车制动方式包括盘式制动和鼓式制动两种,由于鼓式制动器抗热衰退性能较差,会影响纯电动客车的再生制动功能,所以纯电动客车中多使用盘式制动。根据盘式制动器的物理结构和制动原理,利用Modelica标准库中的基本组件Brake、FlangeWithBear⁃ing、ConstantTorque、Mounting1D等构建盘式制动器模型,如图7所示。

图7 盘式制动器模型
4.4 底盘模型
在建立底盘的Modelica模型时,首先需要将所建立的悬架模型、制动模型和轮胎模型之间的接口定义为通讯接口[11],然后再基于纯电动客车的动力学特性,跟据定义的通讯接口进行悬架模型、制动模型和轮胎模型的集成和封装。所建立的纯电动客车底盘模型如图8所示。

图8 底盘模型
4.5 控制模型
整车控制模型主要包括仿真工况曲线数据读取、电池的充/放电控制、电动机转速/转矩控制、行驶与制动状态控制等。其中制动踏板和油门踏板的控制是通过驾驶员对制动力矩和电机转速/转矩信号的控制实现的,由此基于Modelica语言建立的整车控制模型如图9所示。

图9 整车控制模型
根据纯电动客车的结构特点及各物理系统的耦合特性,将建立的动力系统模型、机械部件模型、控制模型以及其它附件模型通过建模时定义好的接口进行耦合连接,得到完整的纯电动客车多领域仿真模型,如图10所示。

图10 整车仿真模型
5 仿真与分析
5.1 仿真参数
参照在某城市运营的纯电动公交车的实车参数,设置整车仿真模型参数,如表1所列。

表1 仿真参数设置
5.2 仿真结果分析
采用NEDC(New European Drive Cycle)标准循环工况和特定城市工况对整车模型进行跟随性仿真。NEDC循环工况包括4个市区循环工况(1部)和1个市郊运行工况(2部),图11为NEDC循环工况仿真结果。由图11可看出,市区循环中,平均车速为19 km/h,最高车速为50 km/h,每个市区循环的有效行驶时间是195 s,行程为1.013 km;市郊循环中,有效行驶时间为400 s,平均车速为62.6 km/h,行程为6.955 km。整个NEDC循环工况仿真时间为1 180 s,行程为9.3 km,最高车速为92.41 km/h,仿真结果表明,整车模型的跟随性较好,其中市郊循环时最高车速偏差是由于设计时最高车速限制导致的。

图11 NEDC工况跟踪性仿真结果
图12为特定城市工况的仿真结果。由图12可看出,在269.20 s、300.40 s和368.08 s三个时刻,仿真车速依次为42.36 km/h、21.46 km/h和30.52 km/h,对应的特定城市工况下的车速分别为61.53 km/h、44.14 km/h和47.69 km/h,车速偏差较大,其中300.40 s时刻时车速偏差最大,为22.68 km/h,这是因为客车质量较大且在较短时间内启停过于频繁导致的,但在随后的304.40 s时刻,仿真速度曲线与城市工况曲线接近重合;在其余的仿真时间(269.20 s、368.08 s时刻)车速偏差均小于3 km/h,偏差比率基本在5%以内,由此表明所建客车模型的整体跟随性较好。

图12 特定城市工况仿真结果
图13为特定城市工况下纯电动客车电池电流及电压仿真曲线。由图13可看出,随着车速及加速度的增大,放电电流逐渐增大,电池电压降低;在制动时,电池的放电电流变为负值(图13a),即电池处于充电状态,此时电机转为发电状态,电压曲线有升高趋势(图13b),表明电池能量消耗速率降低,说明所建立客车模型的经济性良好。
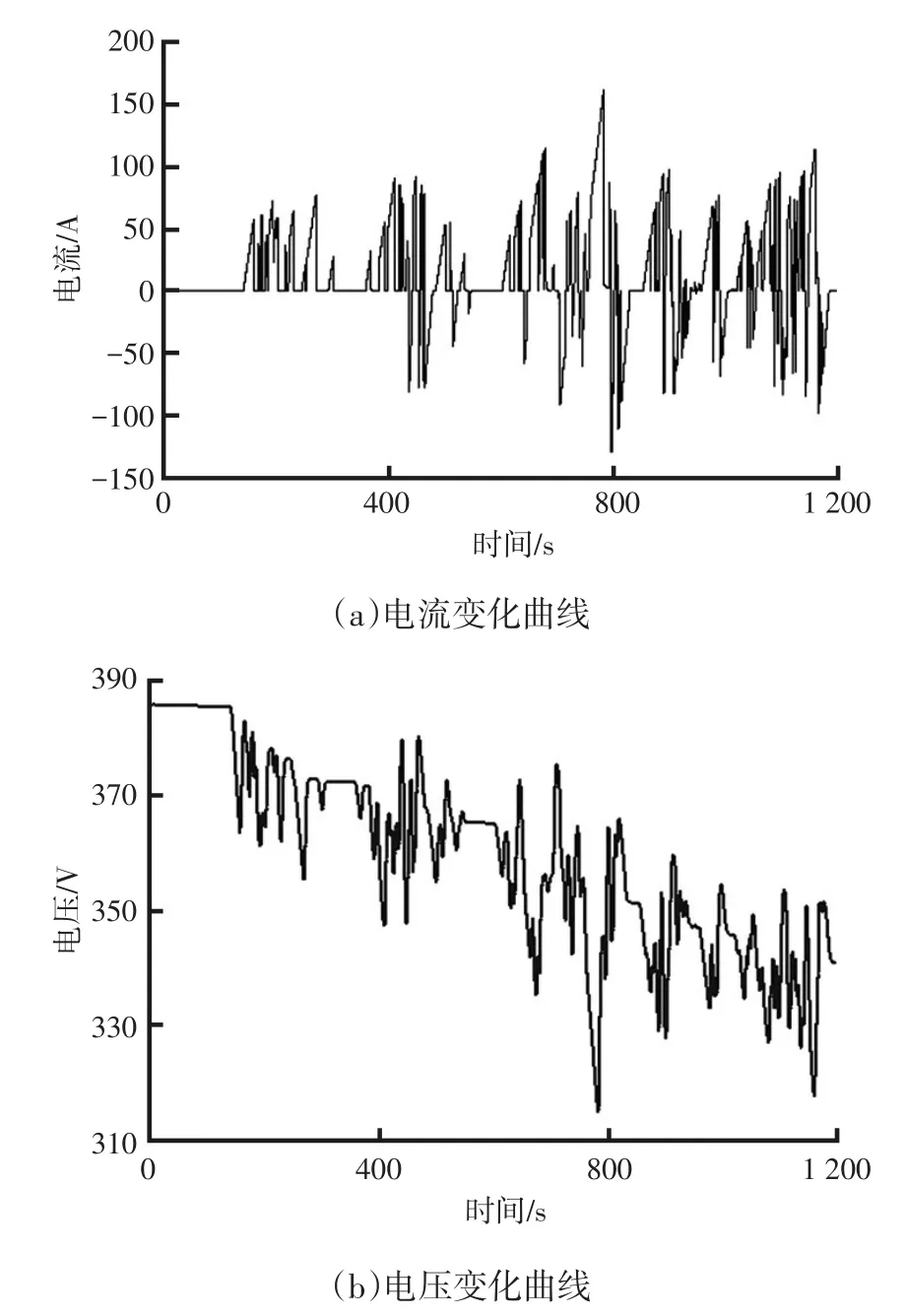
图13 电池电流、电压仿真曲线
图14为特定城市工况下行驶里程仿真曲线。由图14可看出,仿真所行驶路程为8.3 km,最高车速为82.3 km/h(城市公交车行驶的最高车速一般不超过80 km/h),说明所建立客车模型动力性较好。

图14 行驶里程仿真曲线
图15为电池SOC仿真曲线。由图15可看出,仿真时电池的SOC值从理想状态1.0下降到0.871,耗能为3.504 kW·h,可计算得能耗为465.48 Wh/km,与所参照的纯电动公交车实测的能耗平均值480 Wh/km相比,误差为3%,经济性与实车相近,说明所构建的多领域模型是正确的。

图15 电池SOC仿真曲线
6 结束语
为实现纯电动客车多领域物理系统的统一建模与仿真,本文分析了纯电动客车与传统热动力客车的结构差异,并采用模块化划分的方法将纯电动客车划分为动力系统模块、机械部件模块、控制模块以及其它附件模块,同时基于多领域统一建模语言Modelica分别建立了纯电动客车各系统模型,搭建了纯电动客车的仿真模型。参照某城市纯电动公交车实际运行参数,对所建模型进行了NEDC工况和特定城市公交工况下的跟随性仿真分析,仿真结果表明,所建模型的动力性和经济性与实际公交车相符,验证了所建模型的正确性。
1 王俊兰,吴义忠,熊会元.纯电动汽车整车建模仿真研究.计算机仿真,2015(10):190~195.
2 王淑慧.汽车馈能式悬架性能仿真分析:[学位论文].武汉:武汉理工大学,2013.
3 王祺.面向Modelica的多体系统笛卡尔方法建模:[学位论文].武汉:华中科技大学,2011.
4 田丽娟.纯电动轿车多领域统一建模与操控稳定性仿真分析:[学位论文].广州:广东工业大学,2014.
5 Clemens Satzger,Jonathan Brembeck.Framework for the Evaluation of Wheel Torque Blending Algorithms.IFAC Proceedings Volumes,2013,4621.
6 李思.电动汽车锂离子电池等效电路模型的参数辨识研究:[学位论文].北京:北京理工大学,2015.
7 戴彦.电动汽车永磁同步电机直接转矩控制策略研究.机械设计与制造,2016(4):102~106.
8 裴素荣.面向电动汽车的永磁同步电机驱动控制方法研究:[学位论文].东北大学,2011.
9 王先云,刘艳华,马斌,刘志敏,刘立国.基于魔术公式的轮胎特征函数计算方法.科学技术与工程,2016(7):265~269.
10 刘炜,吴义忠,陈立平,熊会元.基于Modelica的电动汽车悬架系统建模与仿真分析.汽车技术,2014(9):43~47.
11 杨俊杰.基于Modelica的纯电动客车动力系统建模与仿真研究:[学位论文].郑州大学,2016.、
(责任编辑 文 楫)
修改稿收到日期为2017年6月6日。
Modeling and Simulation of Pure Electric Bus Based on Modelica
Cheng Lei,Qin Dongchen,Wang Yaokai,Wang Yingjia
(Zhengzhou University,Zhengzhou 450001)
In order to realize multi-domain unified modeling and simulation analysis of pure electric buses,structure of the pure electric bus was divided by the modularization method.Modelica,the unified modeling language of multidomain physics for object oriented,was used to build the model of main power system parts,model of other core mechanical parts of the chassis assembly and the control model of the vehicle.Following performance simulation and analysis of the synthetic performance of the multi-domain model of pure electric buses were carried out with reference of simulation model parameters of a city bus.The results show that the model of pure electric bus has good following performance,and the power and economy are basically identical with the reference bus.
Pure electric bus,Module division,Multi-domain modeling,Modelica
纯电动客车 模块划分 多领域建模 Modelica
U469.7 文献标识码:A 文章编号:1000-3703(2017)08-0043-06
国家重大科技成果转化项目(财建[2012]258)、2014年河南省重点科技攻关项目(142102210103)和郑州市科技领军人才项目(10LJRC188)。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
汽车实用技术(2022年16期)2022-08-31
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年13期)2022-07-19
汽车实用技术(2022年12期)2022-07-05
时代汽车(2021年1期)2021-03-03
北京汽车(2019年4期)2019-09-17
汽车维修与保养(2019年1期)2019-05-05
汽车电器(2018年12期)2019-01-04