智能驾驶小型电动车的设计*
2017-09-12 01:23张志锋肖世德孟祥印叶美松
汽车技术 2017年8期
张志锋 肖世德 孟祥印 叶美松
(西南交通大学,成都 610031)
智能驾驶小型电动车的设计*
张志锋 肖世德 孟祥印 叶美松
(西南交通大学,成都 610031)
设计了一种智能引导和人工驾驶两用的小型电动汽车。该电动汽车利用超声波传感器和激光传感器作为障碍探测感知传感器,通过增量式旋转编码器测量车辆车速,采用PID算法实现车速调节控制。通过样车试验表明,所设计的小型电动汽车能够在特定区域沿墙行驶或沿预设地面黑线稳定的自主行驶,同时能够主动避障。
1 前言
随着全球能源、交通、环境、安全等问题日益突出,汽车技术向低碳化、信息化和智能化的发展趋势日趋明显[12],实现智能驾驶不仅可以减少交通事故,还可以节约能源及节省人力成本。定位导航技术是智能驾驶汽车研发的关键技术之一,目前常用的包括磁导航和视觉导航等[3]。如,上海交通大学研发的CyberC3智能汽车和阿姆斯特丹国际机场的CyberCar智能汽车等采用了磁导航技术,但磁导航需在道路上埋设磁钉或电线等导航设备,整个实施过程繁琐,且变更线路需重新埋设导航设备。视觉导航虽不需要对道路进行改造,但其易受大雾、风沙等自然环境因素的影响。本文采用低成本的超声波传感器和激光传感器进行导航,搭载了基于ARM单片机的智能控制系统,设计了一款智能引导与人工驾驶两用的小型电动车,该车可在特定区域内沿着地面黑线或墙壁、台阶等自动行驶,并能够实现主动壁障。
2 车辆总体设计
智能驾驶电动车的本质是一种集环境感知、决策规划和自动驾驶等于一体的机器人,其综合运用了传感器、自动控制、单片机、信号处理等技术。所设计的智能驾驶小型电动车试验样车整车布局如图1所示。该车的驱动系统、转向系统和制动系统分别采用无刷直流电机、步进电机和直流推杆电机,车身四周安装有超声波传感器,中控系统采用两块STM32微处理器。

图1 智能驾驶小型电动车试验样车整车布局
2.1 电源配置
该车选用的无刷直流电机的额定电压为48 V,直流推杆电机和步进电机的额定电压均为24 V。由于目前国内电池成组和多电压输出技术还不完善,为了保证小型电动车运行安全可靠,分别选用如图2所示的两种锂电池独立供电。

图2 驱动电源
2.2 驱动系统设计
为节省空间和成本,所设计的智能驾驶小型电动车采用了单电机集中驱动模式[4],如图3所示。

图3 单电机集中驱动模式
驱动力是推动汽车前进的外力,是由电机输出转矩经齿轮传递到车轮并与地面相互作用形成的[5],运动过程中驱动力必须大于等于行驶阻力(包括滚动阻力、空气阻力、加速阻力和坡道阻力)。
该试验样车满载总质量m=350 kg,重力G=mg=3 430 N,车轮半径rd=0.2 m,传动效率η=0.9,主减速器传动比i0=4,滚动阻力系数f=0.02,风阻系数C0=0.33,迎风面积A=0.9 m2。由于测试场所为校园、景区等,故爬坡角度设为α=0°,测试车速为v=20 km/h,驱动电机功率p=1 kW,电机转速n=1 500 r/min,则驱动力为:

行驶阻力为:

由式(1)和式(2)可知,Ft>F ,故无刷直流电机的驱动力满足小型电动车的行驶要求。
2.3 转向机构设计
小型电动车的转向机构包括自动转向和人工转向两部分。自动转向机构由驱动控制器、步进电机和减速机构组成,与人工转向机构并联组合,可以实现手动驾驶和自动驾驶任意转换,如图4所示。由图4可看出,步进电机转动时,通过同步带带动从动齿轮旋转,从而带动转向轴旋转实现自动转向。

图4 转向机构
在转向过程中,转向阻力矩与路面摩擦系数、地面与轮胎接触面上的载荷分布以及轮胎的横向运动情况有关。转向阻力可通过半经验公式[6]计算,但因摩擦系数和轮胎压力在不同情况下变化较大,利用半经验公式计算出的转向阻力矩与实际情况有一定差距,为此通过实际测试的方法来计算转向力矩。
原地转向所需力矩远大于车辆行驶过程中所需的力矩,所以首先利用弹簧测力计在普通的沥青路面上测试小型电动车原地转向时所需的最大切向力,并以此作为计算转向力矩的依据。经测试,在沥青路面原地转向时转向盘的最大切向力F=50 N,实测转向盘直径为34 cm,则实测转向力矩T=50×0.17=8.5 N·m。
当小型电动车在车速较高的情况下急转弯时,需要车轮有较大转角及较快的转向速度。参考文献[7]并结合实际试验道路条件,规定转向盘最小转向角速度为270°/s,即转速n=0.75 r/s。
根据实际测得的原地转向时转向盘的最大切向力和所需转速,可计算出转向功率p=40.04 W。
本文选用的步进电机型号为57BYGH7601,其额定功率为110 W,额定电压为24 V,额定转矩为1.8 N·m,减速比为1:3,额定转速为400 r/min(6.7 r/s),转向系统同步带减速比为1:2.5。利用该步进电机作为转向电机时,转向盘达到的最大转速,转向轴能达到的最大转向力矩pmax=1.8×3×2.5=13.5 N·m。因nmax>0.75 r/s,pmax>8.5 N·m,所以该步进电机可满足小型电动车转向时转速和转向力矩的要求。
2.4 自动制动机构设计
自动制动机构利用直流推杆电机实现自动制动,如图5所示。其工作原理为:直流推杆电机将电机的旋转运动转变成推杆的直线运动,利用电机正反转完成推杆伸缩动作[8],推杆外伸时推动制动挡板运动达到制动效果。自动制动机构与人工制动机构采用并联模式,互不干扰。

图5 自动制动机构示意
3 中控系统设计
整车中控系统是由感知信息传感器、计算机和电机驱动控制器等组成,总体结构如图6所示。

图6 中控系统组成
3.1 计算机
为了提高控制系统的处理速度,选用两块STM32F103ZET6微处理器组成分布式控制计算机。一块作主控计算机(NO.1-CPU),主要实现人机交互、决策控制、主从通信等;另一块(NO.2-CPU)实现信息采集和处理,同时将处理结果传给主控计算机。
3.2 传感器
该智能小型电动车寻迹方式主要是沿墙行走和黑线引导两种方式,采用的传感器包括用于测距的超声波传感器,用于车速测量的旋转编码器,用于黑线检测的激光传感器,用于测量前轮转角的红外反射传感器,具体型号如表1所列。
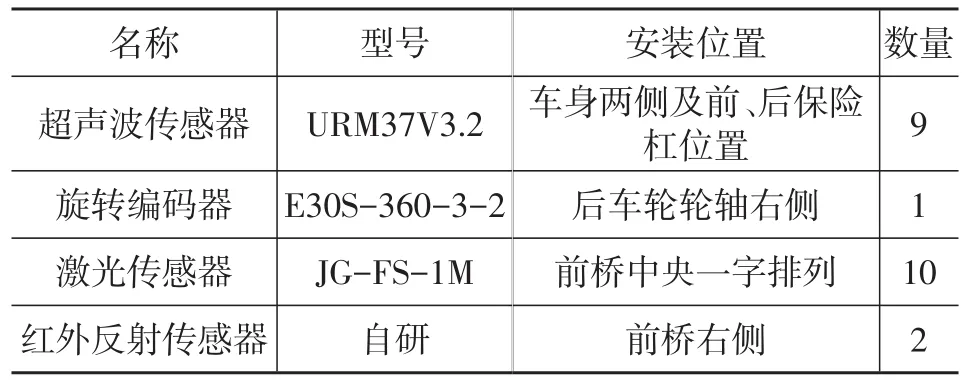
表1 传感器类型及数量
3.3 电机驱动控制器
电机驱动控制器主要包括无刷直流电机驱动控制器、直流推杆电机驱动控制器和转向步进电机驱动控制器。步进电机驱动控制器和直流推杆电机驱动控制器由单片机通过I/O端口进行控制,无刷直流电机驱动控制器由单片机通过I/O和D/A模块控制[9]。不同D/A值对应的车速见表2。

表2 不同D/A值对应的车速
4 控制策略及软件设计
该智能小型电动车分别采用超声波传感器和激光传感器实现两种自动行驶模式,即沿墙壁或台阶自动行驶,及在特殊路段沿地面黑线自动行驶,其控制策略流程如图7所示。

图7 驱动控制流程
4.1 沿墙行驶模式
沿墙行驶模式的实现方式为:利用车身一侧前、后两个超声波传感器实时检测车身距墙壁或台阶等的距离,根据两个传感器采集的距离差值信息控制转向电机的运动,使车辆与墙壁或台阶等保持在恒定的距离范围内。如图8所示,车身一侧距墙壁的距离范围可分为3种情况,图中区域B为拟定的电动车行驶区域,区域A和区域C为非合理区域;车身姿态在每个区域可分为3种状态;前轮位置在每种车身姿态下又分为3种状态,其程序流程如图9所示。

图8 沿墙行驶模式示意
4.2 黑线引导模式
在没有墙壁或不宜设台阶的位置用黑线引导小型电动车行驶,该模式通过激光传感器[10]检测黑线位置,然后判断小型电动车是否偏离预定轨迹,其程序流程如图10所示。
4.3 驱动速度控制
采用数字PID控制算法,通过D/A模块对无刷直流电机实现闭环控制,在控制软件中采用移动平均滤波法来降低采样过程中的信号干扰,增加了系统稳定性。PID控制系统基本原理如图11所示。数字PID控制系统的差分方程[11]为:

式中,ΔUn为第n次输出增量;en为第n次偏差;en-1第为n-1次偏差;en-2为第n-2次偏差。

图9 沿墙行驶模式程序流程

图10 黑线引导模式程序流程
4.4 主动避障
采用拟人思维模拟驾驶员避障操作,主要原理为:利用安装在前保险杠中间位置的超声波传感器检测车辆正前方是否有障碍物,距障碍物3 m时控制车辆减速,距障碍物1.5 m时控制停车;利用安装在前保险杠左右两端的超声波传感器检测斜方向的障碍物,根据所测得的距离控制转向步进电机的旋转速度、旋转角度以及驱动电机的转速;倒车时,利用安装在车辆后保险杠左右两端的超声波传感器检测车辆后方障碍物,由于倒车速度较慢,所以设定距离障碍物1 m时控制停车。

图11 PID控制原理框图
5 测试试验
完成小型电动车样车设计后,将传感器、控制器等安装在小型电动车上进行了实车测试,测试场景如图12所示,沿墙行驶模式测试的超声波传感器数据结果如图13所示,图14为加速测试结果。
如图13所示,在小型电动车沿墙行驶时,由超声波传感器测得的该车距墙面的距离始终在1.1 m左右,表明在设计时速内小型电动车能够按照预定设计保持直线沿墙行驶。如图14所示,该小型电动车加速到最大速度需要16.9 s,加速性能一般,但是整个加速过程平稳,乘坐舒适,能够满足小型电动车低速行驶需求。

图12 样车沿墙行驶模式测试场景

图13 沿墙行驶模式测试结果

图14 小型电动车加速曲线
6 结束语
本文设计了一款智能引导和人工驾驶两用的小型电动车,确定了智能小型电动车的驱动机构、转向机构和制动机构的方案,以STM32F103VET6微处理器为核心,以MDK5.0为开发平台,研制了整车驱动控制器,实现了对驱动、制动和转向三大系统的自动控制。该车利用超声波传感器和激光测距传感器实现循迹引导和障碍感知,在特定领域能够满足低速导航需求,整车设计简单,成本较低,具有一定的工程实用价值。
1 制造强国战略研究项目组.制造强国战略研究领域卷(一).北京:电子工业出版社,2015.
2 中国汽车工程学会.中国汽车技术发展报告.北京:北京理工大学出版社,2015.
3 乔维高,徐学进.无人驾驶汽车的发展现状及方向.上海汽车,2007(7):40~43.
4 Chan C C,Chau K T.An advanced permanent magnet motor drive system for battery-powered electric vehicles.IEEE Transactions on Vehicular Technology,1996,45(1):180~188.
5 陈军.电动汽车电池能量管理系统及整车控制平台的研究与开发:[学位论文].杭州:浙江大学,2005.
6 王旭斌.汽车转向阻力矩的分析.机电技术,2015(6):132~134.
7 谢宪毅.电动汽车自动驾驶平台及其技术研究:[学位论文].青岛:青岛理工大学,2015.
8 彭平,李华峰,李万明.电动推杆在无人飞艇舵面控制系统中的应用.航空科学技术,2010(1):21~24.
9 储江伟,施树明,王荣本,等.视觉导航智能汽车试验平台总体设计.汽车工程,2004,26(2):214~219.
10 王瀛洲.智能车自主寻迹系统硬件的设计分析.仪器仪表用户,2011,18(1):60~62.
11 曾星星.基于摄像头的路径识别智能车控制系统设计.湖北汽车工业学院学报,2008,22(2):72~76.
(责任编辑 文 楫)
修改稿收到日期为2017年2月13日。
Design of Small Intelligent Driving Electric Car
Zhang Zhifeng,Xiao Shide,Meng Xiangyin,Ye Meisong
(Southwest Jiaotong University,Chengdu 610031)
A small electric car with intelligent guide and manned driving was designed,which uses ultrasonic sensors and laser sensors as obstacle detection sensors,and uses incremental rotation encoder to measure vehicle speed,and adopts the PID algorithm to control vehicle speed.The prototype car test results show that the designed small electric car can travel stably and automatically,and avoid obstacles automatically in specific areas along the wall or preset black-and-white line on the ground.
Small electric car,intelligent driving,Automatic tracking,PID control
小型电动汽车 智能驾驶 自动寻迹 PID控制
U462.2 文献标识码:A 文章编号:1000-3703(2017)08-0001-05
四川省应用基础研究基金资助项目(2014JY0212)。
猜你喜欢
消费电子(2022年7期)2022-10-31
中国典型病例大全(2022年7期)2022-04-22
闽江学院学报(2021年5期)2021-11-19
建材发展导向(2021年6期)2021-06-09
兵器装备工程学报(2020年12期)2021-01-12
汽车与驾驶维修(汽车版)(2020年5期)2020-07-24
21世纪商业评论(2020年12期)2020-01-14
小天使·六年级语数英综合(2018年10期)2018-10-15
科技创新导报(2016年4期)2016-11-19
军事文摘·科学少年(2016年7期)2016-09-20