
水下机器人柴电动力系统可靠性研究
2017-09-11 12:35朱兴华胡志强
失效分析与预防 2017年2期
杨 翊,朱兴华,胡志强,林 扬
(中国科学院沈阳自动化研究所 机器人学国家重点实验室,沈阳 110016)
水下机器人柴电动力系统可靠性研究
杨 翊,朱兴华,胡志强,林 扬
(中国科学院沈阳自动化研究所 机器人学国家重点实验室,沈阳 110016)
大型化是未来水下机器人发展的重要趋势,大排水量水下机器人多采用柴油机作为动力系统的动力源。本研究面向水下机器人柴电动力系统在设计过程中选用单套或双套柴油机组技术方案的问题,进行系统可靠性分析,对比单套柴油机组与双套柴油机组在不同工况下的系统可靠度。结果表明:巡航状态下双套柴油机组可靠度较单套柴油机组提高25%以上;高速航行状态下双套柴油机组可靠度较单套柴油机组降低最大可达31.2%;巡航状态与高速航行状态各占全部工作流程一半时,双套机组的系统可靠度与单套机组的系统可靠度相同。
水下机器人;动力系统;柴电;柴油机;可靠性
0 引言
水下机器人(Unmanned Underwater Vehicles,UUV)是人类认识和开发海洋不可缺少的工具之一[1]。近年来,水下机器人的发展呈现出大型化的发展趋势,大排水量水下机器人(Large Displacement Unmanned Underwater Vehicle,LDUUV)成为世界水下机器人技术发展的重点。为了支撑新型水下机器人的长期作业能力,多采用具有较高能量密度和功率密度的油电混合动力系统。然而,由于水下机器人需要在无人干预的条件下长期工作,且工作环境比较恶劣,所以对于其动力系统可靠度具有较高要求。本研究结合水下机器人柴电动力系统技术研发和工程应用中积累的经验,面向水下机器人在设计过程中选用单套或双套柴油机组技术方案的问题,针对水下机器人使用过程中可能存在的各种工况,对柴电动力系统进行可靠性分析。通过分析得到水下机器人柴电动力系统在各种工况下的可靠度,并通过比较为新型水下机器人技术方案的论证提供设计依据。
1 发展趋势与问题
美国将超过36 in(0.914 4 m)的大直径水下机器人或排水量超过20 000 lb(9.0718 t)的大排水量水下机器人统称为LDUUV[2]。大排水量水下机器人的代表是波音公司正在研制的Echo系列水下机器人。为了支持大排水量水下机器人的研究,波音公司分别于2001年和2015年开发了长约6 m的Echo Ranger和长约10 m的Echo Seeker。2016年,波音公司研发的Echo Voyager(图1)完成样机试制,该系统长约15 m,重达50 t,采用柴电混合动力,设计续航力达6个月或12 000 km[3]。
为支撑新型水下机器人的长航时作业能力,涌现出了燃料电池、半燃料电池、热机、斯特林机等动力源技术[4]。其中,柴油机能够以相当高的热效率将热能转变为电能,是很有发展前途的水下机器人动力源[5],适合应用于大排水量水下机器人。波音公司研发的Echo Voyager即采用柴油机作为其动力源。

图1 Echo Voyager大排水量水下机器人Fig.1 Echo Voyager LDUUV
然而,由于水下机器人的工作环境恶劣,工作强度高,时间长,因此具有较高的可靠度要求[6]。动力系统是水下机器人的重要组成部分,因此具有更加严格的可靠度要求。普通的船用柴油机对于日常养护和维修都有非常具体而细致的要求,应用于大排水量水下机器人需要应对在无人维护状态下长期工作的问题。并且由于水下机器人结构非常紧凑,柴油机的发热和振动不仅会影响动力系统的可靠度,还会降低水下机器人其他零部件的可靠度[7]。在设计过程中,通常采用双机并联的冗余系统方式(以2套功率为0.5 PkW的柴油机组并联代替1套功率为PkW的柴油机组)提高动力系统的可靠度。然而,由于水下机器人工作于复杂恶劣工况之下,环境等因素对柴油机组也会产生影响;在这种状况下,并联系统会增加水下机器人系统的复杂度,并进一步恶化工作环境,导致冗余系统可靠度的降低。此外,在高速航行状态下,系统要求双机全部以最高功率运行,2套机组之间为串联关系,反而会降低水下机器人的可靠性。因此,为了对比单套柴油机组和双套柴油机组的可行性和优劣性,需要对两种技术方案进行可靠性的分析和对比。
2 柴电动力系统可靠度建模
2.1 系统组成
采用柴油机组的水下机器人动力系统包括进排气系统、柴油机组及其控制系统、机油供给系统、冷却系统、燃油系统5部分,单套柴油机组的动力系统构成如图2a所示。巡航状态下,可将双套柴油机组视为并联系统。此时,单套柴油机组和双套柴油机组所涉及的区别主要在于机组及其控制系统、机油供给系统、冷却系统3个方面。在进排气系统、燃油系统方面,单套柴油机组和双套柴油机组两套方案并不会改变相关分系统的组成。双套柴油机组并联的动力系统构成如图2b所示。
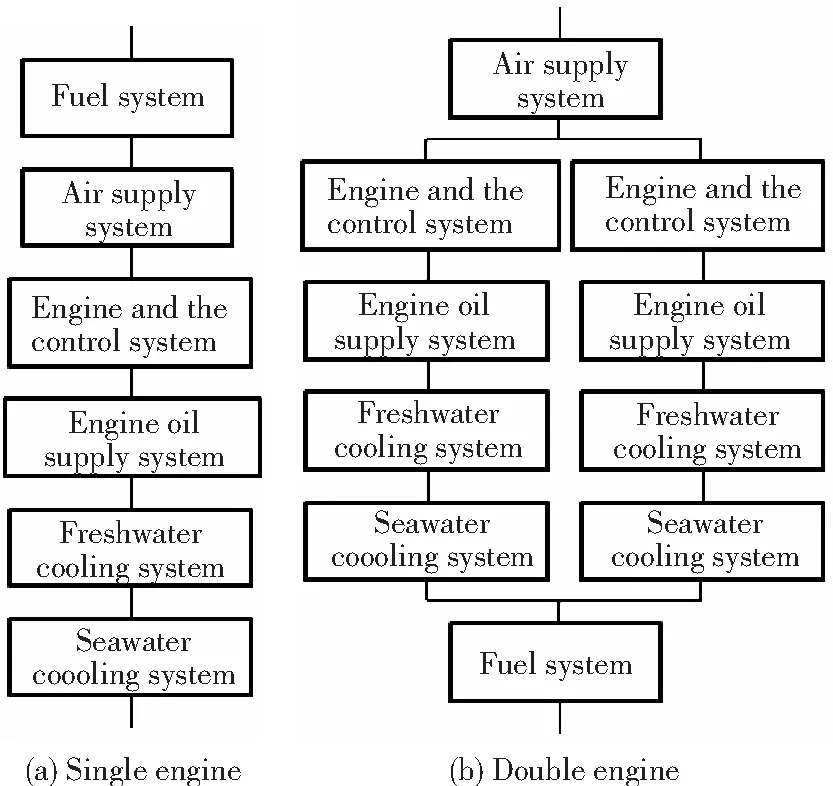
图2 单机和双机系统构成框图Fig.2 Single engine and double engine system
机组及其控制系统的构成如图3a所示,将柴油机视为一个整体组件,与柴油机控制器共同构成柴油机部分;电动机与电动机控制器共同构成一个部分。机油供给系统包括机油预供泵和管路(图3b)。柴油机组的冷却系统组成如图3c所示,包括泵、流量计、球阀、温度计和管路。由于进排气系统和燃油系统并不会因单套和双套柴油机组而发生变化,因此在分析过程中将二者各视为一个整体。
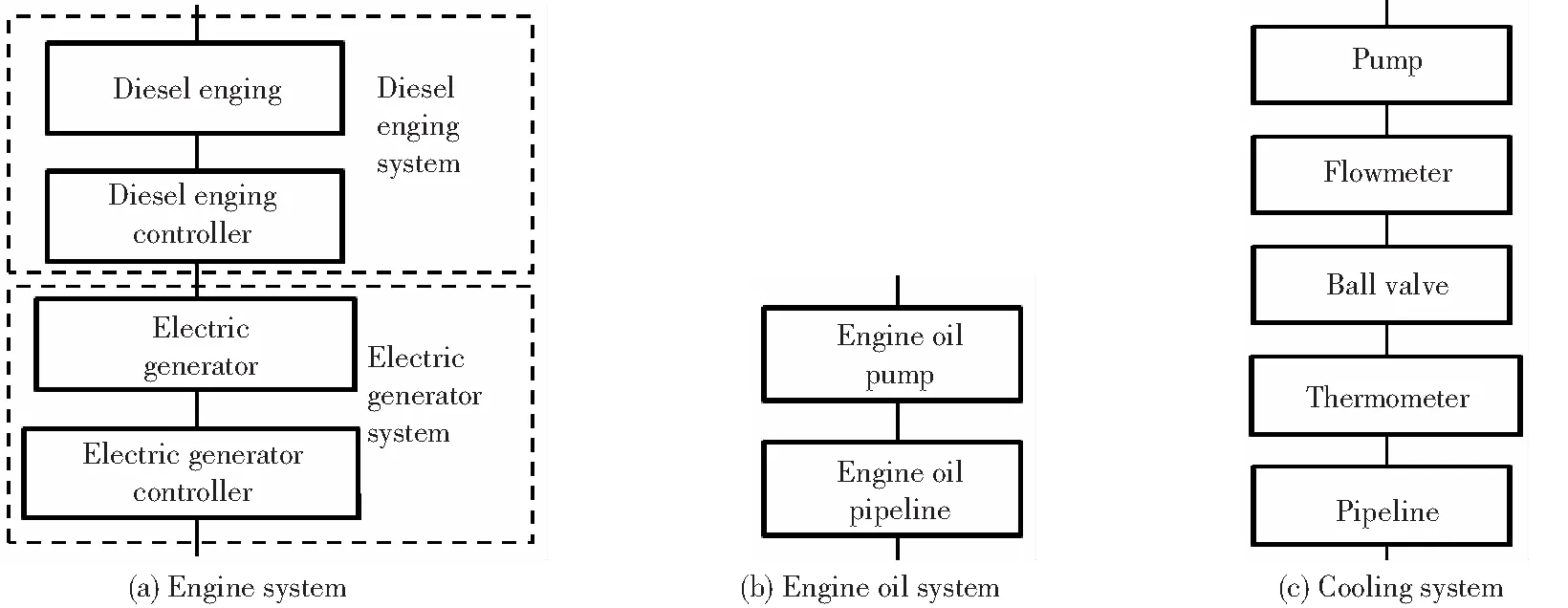
图3 系统框图Fig.3 System diagram
将各分系统的组成带入单套和双套柴油机组系统中。单套柴油机组动力系统的详细系统构成如图4所示。巡航状态下双套柴油机组并联的动力系统如图5a所示;在高速航行状态下,由于双柴油机组满功率工作,要求2套柴油机组必须同时可靠工作,则2套柴油机组由并联关系转换为串联关系,如图5b所示。
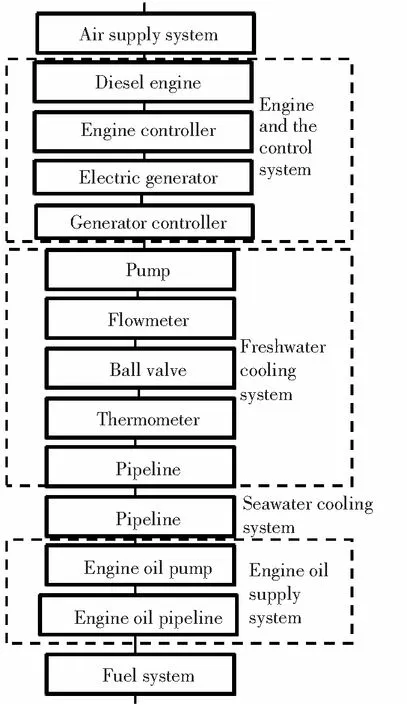
图4 单机系统模型Fig.4 Single engine system model
2.2 可靠性建模
根据图中柴油机组的系统构成模型,建立柴电动力系统的可靠性模型。设进排气系统可靠度为R1,机组及其控制系统可靠度为R2,机油供给系统可靠度为R3,冷却系统可靠度为R4,燃油系统可靠度为R5。
设柴油机可靠度为R21,柴油机控制器可靠度为R22,发电机可靠度为R23,发电机控制器可靠度为R24。设机油预供泵管路为R31,机油管路为R32。设泵可靠度为R41,流量计可靠度为R42,球阀可靠度为R43,温度计可靠度为R44,管路可靠度R45。则单套柴油机组的动力系统模型如图6a所示,巡航状态下双套柴油机组并联的动力系统模型如图6b所示。
在工程应用中,通常可以将系统可靠度与各单元可靠度的关系保守地考虑为极端载荷下的可靠度(即可能出现的最恶劣载荷代替载荷随机变量,这时组件之间没有失效相关性)[8]。此时,单机系统和双机并联系统的可靠度可通过式(1)、式(2)计算。
(1)
(2)
然而,双套柴油机组可能会造成进排气量、载体内部振动和温度发生变化,进而造成系统的环境发生变化。进排气量增加会造成进排气系统可
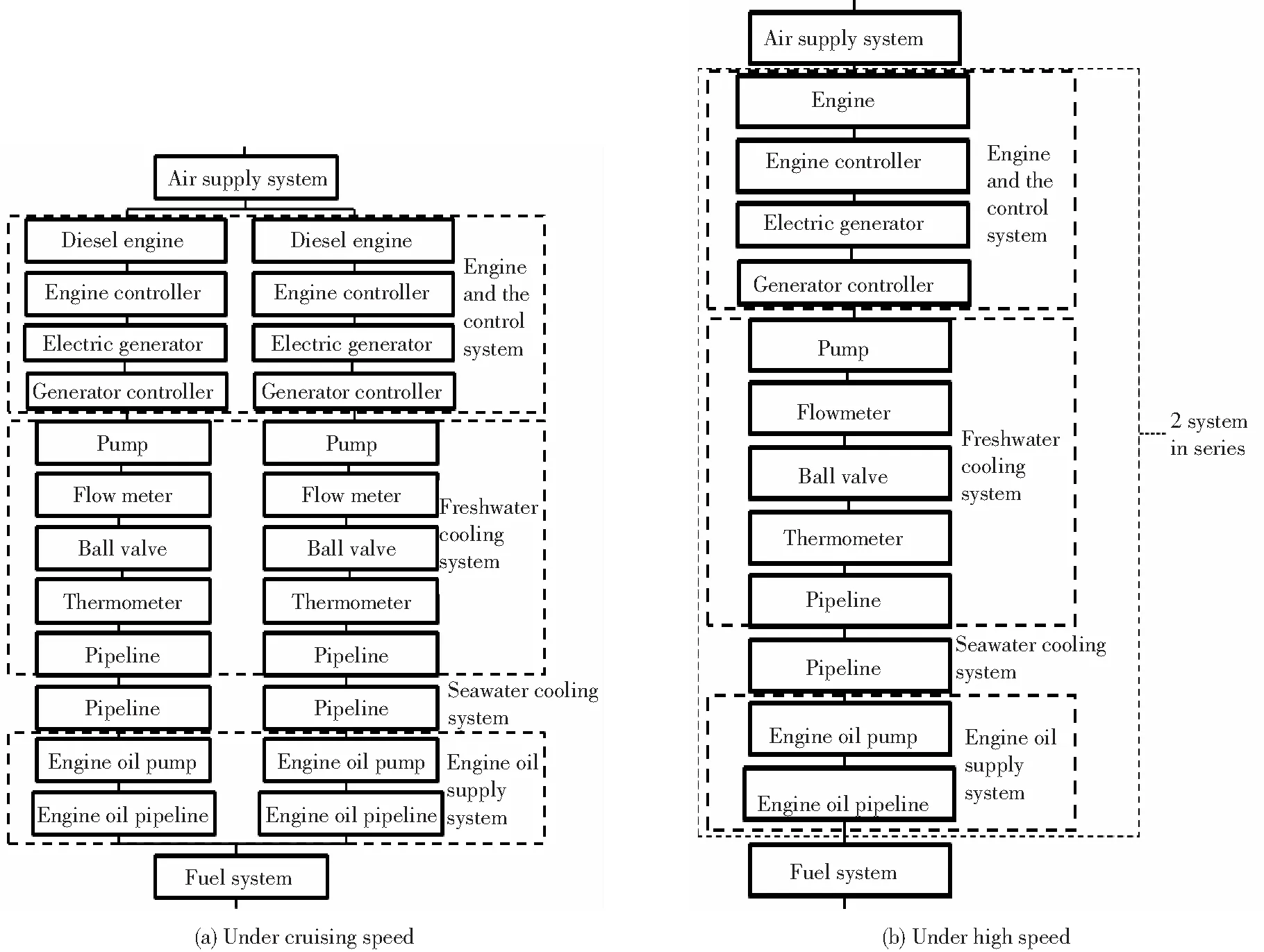
图5 双机系统模型Fig.5 Double engine system model
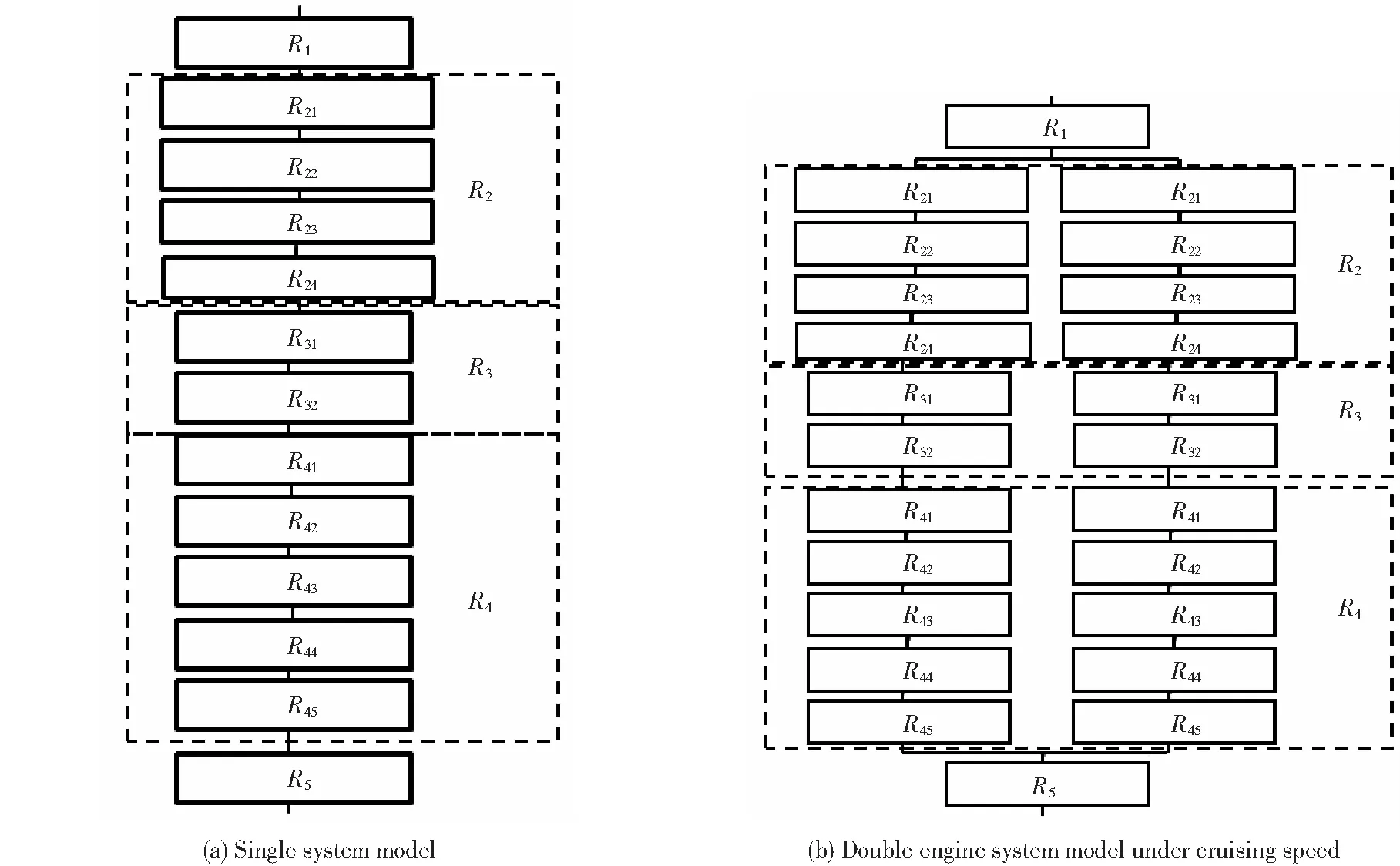
图6 系统模型Fig.6 System model
靠度降低,振动加大会造成系统连接处更容易松动、结构件更容易发生疲劳失效,温度升高会降低电子元器件、密封件等零部件的寿命[9-10]。在计算时通过加乘系数来表述此类影响。设进气量变化对进排气系统造成的影响因子为β1,振动对整个系统造成的影响因子为β2,温度对整个系统造成的影响因子为β3。则双柴油机组并联的动力系统可靠度为
(3)
双套柴油机组还可能有另一种交替运行的使用方法,既先开启一套柴油机组,另一套机组作为备份。例如一套柴油机组出现故障,则可开启备用柴油机组,以此达到提高系统可靠度的目的。但是,备用柴油机组很可能会受到另一台柴油机组运行的影响,导致其自身可靠度下降。设在交替运行状态下一套柴油机组对另一套柴油机组的影响为γ,则在这种状况下双套柴油机组并联的动力系统可靠度可表达为
(4)
最后,根据图5b可建立高速航行状态下双柴油机组串联的动力系统可靠性模型,如图7所示。此时的系统可靠度、考虑环境影响的动力系统可靠度分别为
(5)
(6)
3 可靠度计算
3.1 可靠度数据估计
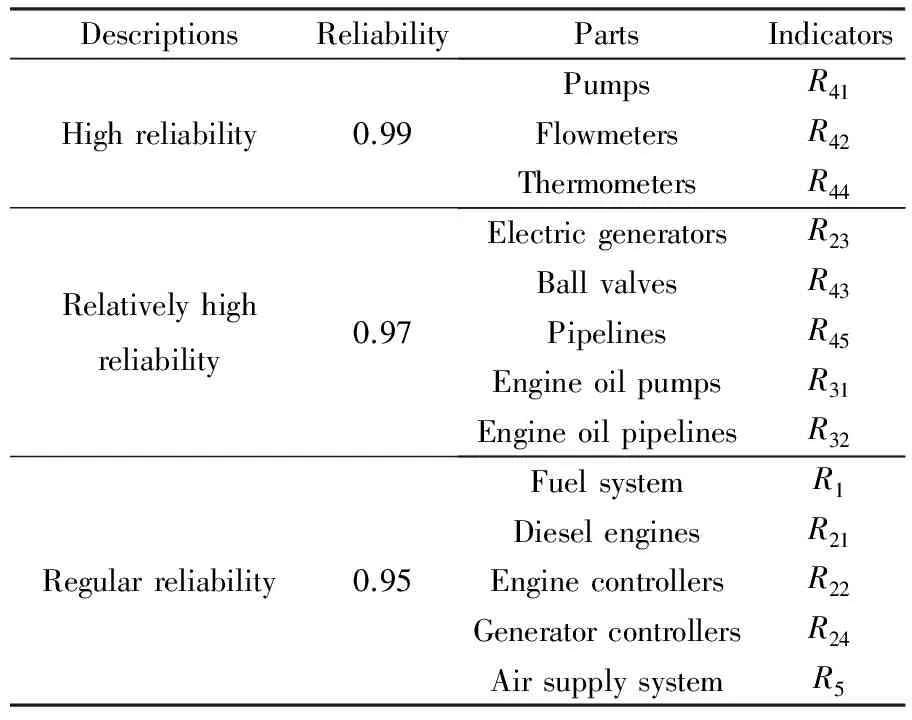
由于缺乏柴电动力系统相关组部件的可靠性数据,同时因为本研究的分析着重对单套和双套柴油机组可靠性的对比,而不强调计算出每套柴油机组可靠度的准确性,因此,通过初步的估计给出各组部件的可靠度,同时假设组部件的可靠度不会随着系统运行功率的改变而改变。通过将组部件按照产品类型、结构复杂度以及使用经验等因素划分为3类,即可靠度高、可靠度较高、可靠度一般,并分别赋予对应的可靠度数值,如表1所示。

图7 高速状态下双机系统模型Fig.7 Double engine system model under high speed表1 柴油机组组部件可靠度估计Table 1 Reliability evaluation
DescriptionsReliabilityPartsIndicatorsHighreliability0.99PumpsR41FlowmetersR42ThermometersR44Relativelyhighreliability0.97ElectricgeneratorsR23BallvalvesR43PipelinesR45EngineoilpumpsR31EngineoilpipelinesR32Regularreliability0.95FuelsystemR1DieselenginesR21EnginecontrollersR22GeneratorcontrollersR24AirsupplysystemR5
3.2 可靠度计算
将表1中数值带入式(1)中可得单柴油机组的动力系统可靠度为Rs1=0.64。
将以上数值带入式(2)中可得巡航状态下双柴油机机组的动力系统可靠度Rs2=0.83。

在双套柴油机组交替运行情况下,设一台柴油机组对另一套柴油机组的可靠度影响因子为γ=0.95。将以上数据带入式(4)中可得动力系统可靠度为Rs3=0.82。

经初步分析,单柴油机组和双柴油机组的可靠度数值及其对比如表2所示。通过分析可知,在水下机器人巡航状态下,双柴油机组确实可以显著提高动力系统的可靠度,至少可以提高25%以上的可靠度。然而,如果要求系统高速航行,必须实现满功率运行,则由于双柴油机组增加了系统的复杂度,会大幅降低系统的可靠度,最大可能会使系统的可靠度下降31.2%。

表2 单双柴油机组可靠度对比
4 混合工况下双机动力系统可靠度分析
通过以上分析可得到单套柴油机组的可靠度、双套柴油机组在巡航和高速航行等工况下的系统可靠度。为了进一步了解双套柴油机组在包括高速航行状态和巡航状态的混合工况下对系统可靠度的影响,需要进行进一步的分析。
4.1 可靠度模型
对于双套柴油机组,在混合工况下,巡航状态下两套机组可视为并联关系,此时系统可靠度为Rs2;高速航行状态下两套机组可视为串联关系,此时系统可靠度为Rs4。设大排水量水下机器人的航行总时长为t0,在巡航状态下航行时间为t1,则在高速航行状态下航行时间为t2=t0-t1。
为了简化分析过程,设机组的故障率为常数,既故障率不会随工作时间而变化,机组的条件可靠度也与时间t无关。设双机组并联系统的故障概率函数fs1(t)和双机组串联系统的故障概率函数fs2(t),则在混合工况航行条件下,水下机器人柴电动力系统的故障率为
(7)
则柴电动力系统在混合工况下的系统可靠度R0(t)为
(8)
由于系统的故障概率函数未知,在工程应用中可通过简化计算得到柴电动力系统可靠度。
(9)
通过式(9)可以在工程中比较简单地估计混合工况下双柴油机组动力系统可靠度。
4.2 可靠度计算
不考虑环境对双套机组的影响,将Rs2=0.83、Rs4=0.46带入式(9)中,取t1为0~t0范围内的一个数,则系统可靠度Rs0的数值范围如图8所示。水下机器人巡航状态占整个工作流程的百分比对应的系统可靠度Rs0数值如表3所示。

表3 系统可靠度Rs0

表4 系统可靠度
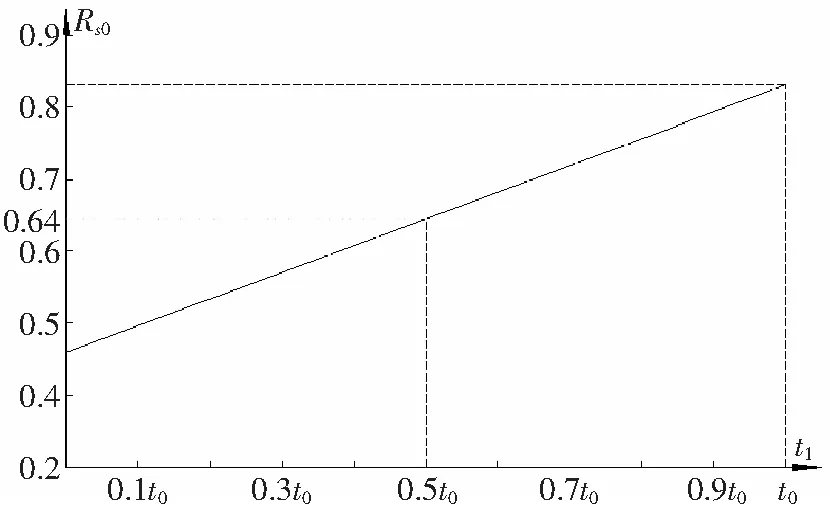
图8 系统可靠度变化曲线Fig.8 System Reliability Variety
通过以上分析可知,在理想状况下,巡航状态与高速航行状态各占全部工作流程一半(t1/t0=50%)时,双套机组的系统可靠度与单套机组的系统可靠度相同(Rs0=Rs1)。当巡航状态大于全部工作流程50%时,双套机组的系统可靠度Rs0大于单套机组的系统可靠度Rs1。

5 结论
1)在巡航状态下,双柴油机组确实可以显著提高动力系统的可靠度,至少可以提高25%以上的可靠度。然而,如果要求高速航行,则由于双柴油机组增加了系统的复杂度,会大幅降低系统的可靠度,最大可能会使动力系统的可靠度下降31.2%。
2)若双套柴油机组需要在巡航状态和高速航行状态下交替运行,则巡航状态与高速航行状态各占全部工作流程一半(t1/t0=50%)时,双套机组的系统可靠度与单套机组的系统可靠度相同。当巡航状态大于全部工作流程50%时,双套机组的系统可靠度大于单套机组的系统可靠度。
[1] 封锡盛,李一平. 海洋机器人30年[J]. 科学通报,2013,58(s2):2-7.
[2] Department of the Navy. The navy Unmanned Undersea Vehicle (UUV) master plan[R]. Washington D.C.,2004:67-77.
[3] Kira Coley. Echo Voyager: New frontiers in Unmanned Technology[J]. Marine Technology Reporter,2016:22-27.
[4] 陈强. 水下无人航行器[M]. 北京:国防工业出版社,2014:189-191.
[5] 蒋新松,封锡盛,王棣棠. 水下机器人[M]. 沈阳:辽宁科学技术出版社,2000:72-76.
[6] Yang Y, Yi R W, Zhu X H, et al. Reliability allocation for the mechanical system of autonomous underwater vehicles[C]. Oceans,2016,Shanghai,2016:1-4.
[7] 杨翊,朱兴华,胡志强,等. 自主水下机器人的封闭式柴油机舱传热分析[J]. 内燃机工程,2015,36(4):85-89.
[8] 谢里阳,王正,周金宇,等. 机械可靠性基本理论与方法[M]. 北京:科学出版社,2009:14-15.
[9] Lall P, Pecht M, Hakim E B. Characterization of functional relationship between temperature and microelectronic reliability[J]. Microelectronics Reliability,1995,35(3):377-402.
[10] 吴松华,秦蓬波,王景鹤,等. 聚硫密封剂在高温空气中的老化行为研究[C]. 北京:北京国际粘合技术研讨会暨第二届亚洲粘合技术研讨会论文集,2007:18-01-18-06.
Reliability Studies for Diesel-Electric Dynamic System ofUnmanned Underwater Vehicles
YANG Yi,ZHU Xing-hua,HU Zhi-qiang,LIN Yang
(StateKeyLaboratoryofRobotics,ShenyangInstituteofAutomation,ChineseAcademyofSciences,Shenyang110016,China)
Unmanned underwater vehicles will develop towards large displacement. And large-displacement unmanned underwater vehicles (LDUUV) usually use diesel engines for power supply. In order to solve the problem of choice between single and double diesel engines in the design process, the system reliabilities under different working conditions were analyzed and compared in this paper. The following conclusions were drawn: 1) the reliability of double diesel engine systems is 25% higher than single engine systems under the cruising speed; 2) the reliability of double diesel engine systems can be 31.2% lower than single engine systems under the highest speed; 3) when the states of the cruising speed and the highest speed take the same time in the working process, the reliability of double diesel engine systems equals the single engine systems.
unmanned underwater vehicle; dynamic system; diesel-electric; diesel engine; reliability
2017年1月16日
2017年3月28日
中国科学院科技创新重点部署项目(KGFZD-125-014)
杨翊(1987年-),男,硕士,主要从事水下机器人结构设计、水下机器人总体技术等方面的研究。
TP202.1
A
10.3969/j.issn.1673-6214.2017.02.004
1673-6214(2017)02-0087-07
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
疯狂英语·新读写(2021年6期)2021-08-05
中学生英语(2017年6期)2017-07-31
科学与财富(2017年18期)2017-07-09
青年歌声(2017年6期)2017-03-13
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
环球时报(2014-07-07)2014-07-07
军事历史(1999年2期)1999-08-21
