
一种机载火控雷达空地成像算法
2017-09-08 06:53佴俊王波
电子技术与软件工程 2017年14期
文/佴俊 王波
一种机载火控雷达空地成像算法
文/佴俊 王波
随着硬件技术的发展,现在国际上歼击机的航空电子系统具有越来越强的功能,在火控雷达的空地模式中,成像范围更大、分辨率更高、定位更准确的图像显得越来越重要。本文介绍了一种基于天线扫描的、高分辨率的、并在地理坐标下成像的算法,该算法在载机平台大机动时仍然能提供了更高的图像分辨率和更精确的目标地位,为火控系统进行目标识别提供有力条件。
机载火控雷达 成像 拼接
1 引言
目前国际上机载火控雷达“地图方式”下有“RBM”、“DBS”及“SAR”等方式,其中“RBM”和“DBS”及相应的扩展方式在成像过程中,天线处于扫描状态,能提供大范围的地面图像,但是这几种成像算法不能提供高分辨率的图像;“SAR”模式能提供高分辨率的图像,但是在成像过程中,天线与载机航向处于一个固定的夹角,不能在方位向上大范围成像。并且这几种成像方式都是基于成像平面的成像,与实际的地面目标和地形存在几何失真,不利于目标识别和精确打击。所以,在火控雷达的空地成像的模式中,特别是近距离空地成像模式中,迫切需要一种算法,能在扫描方式下,提供基于地理坐标系下大范围的高分辨率图像。
本文将文献[1][2][3]的环视“SAR”算法应于机载火控雷达的空地成像中,该方法在近距离、载机平台大机动条件下、大范围成像时有利于提高成像的分辨率,并同时校正成像过程中存在的几何失真。本文描述了该算法的流程,并用实测数据进行了成像处理的验证。

图1:成像信号处理流程图
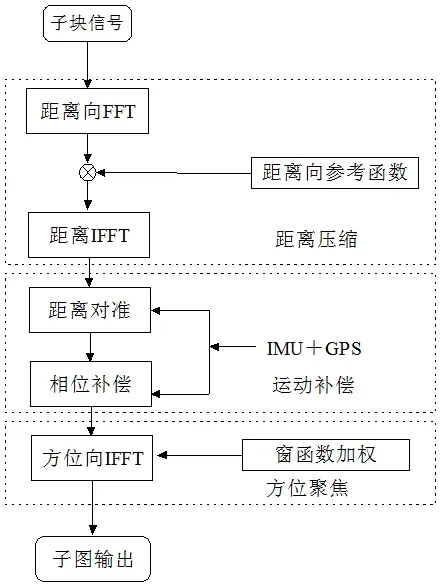
图2:单个子块图形成像信号处理流程

图3:单个子图几何失真校正中的地面校正网格点分布
2 成像算法流程及其特点
与目前国际通用的火控雷达的高分辨率“SAR”成像模式相比,天线扫描模式成高分辨率图像有其自身特点。雷达波束匀速旋转扫描的过程中,信号的多普勒中心值变化非常快,给直接大区域成像带来了很大困难。文献[1][2][3]提出了基于子块成像拼接的处理方法完成最后扫描成像处理,并做了仿真和实际验证,结果表明,该成像处理算法在扫面模式下成高分辨率图像是有效的。该算法是一个基于子块成像和图像拼接的处理流程,处理流程如图1所示。
从图1中可以看出,整个信号处理流程主要分三个主要部分:子图成像处理,几何失真校正,图像的拼接。下面对成像的步骤进行逐步分析。

图4:正前视方向子图与校正图对照

图5:45度斜视方向子图与校正图对照
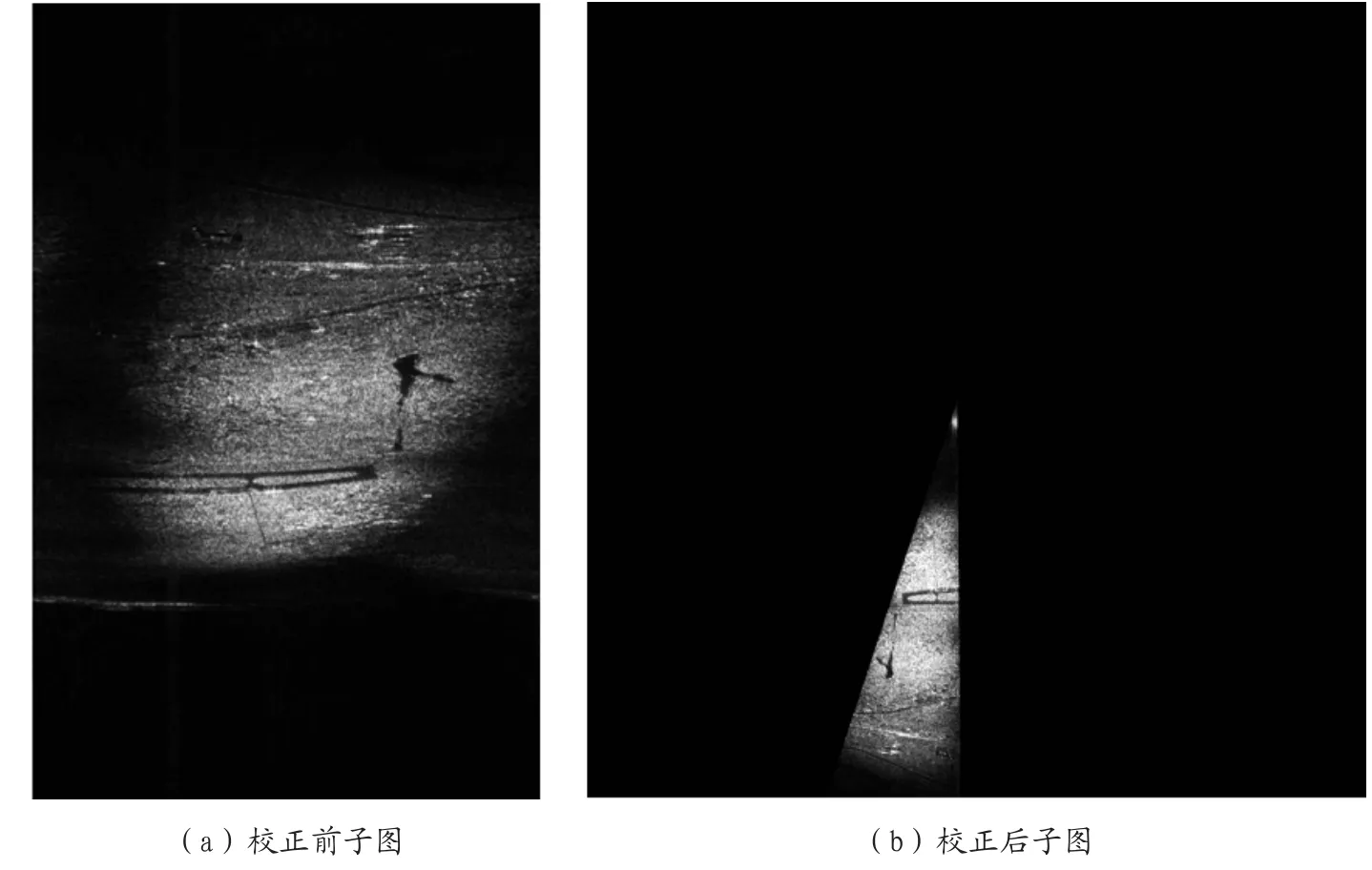
图6:大侧视方向的子图校正前后的对照
2.1 子块成像
单个子图的成像采用基于转台成像的线形RD算法。该算法计算量小,实时性好,简单有效等特点,适合工程实现。
整个信号处理流程由距离压缩、运动补偿和方位向聚焦三个步骤构成,如图2所示。该算法的关键步骤是运动补偿,包括距离对准和相位补偿。距离对准是以给定的参考距离为参考,并按照天线相位中心(APC)距离进行逐个脉冲补偿。这种以固定点为参考的空不变运动补偿使得线性RD算法具有一定局限性。
(1)成像区内除中心点外各点的运动补偿存在剩余误差,该剩余误差具有空变性,且成像区尺寸越大,或斜视角越大,空变效应越严重;
(2)线性RD算法对成像区域大小有限制,对成像区域直径d0的限制为

(3)成像结果存在几何失真,失真程度随斜视角和成像区尺寸增大而恶化。
2.2 图像几何失真校正
由于单个子图存在严重的几何失真,所以在进行图像拼接前必须做几何失真校正。由于图像几何变形程度受雷达波束视角、平台飞行高度及斜视角等诸多因素影响,对线性RD成像结果的几何失真校正必须建立在逐点校正的基础上。天线扫描如图所示,校正步骤如下:
第一步:在成像区范围内人为设置等间隔分布的散射点,称为地面校正网格点,见图3。网格分布平行于 x-y坐标系,相邻点间隔按照图像分辨率要求设置,即△x=ρα、△y=ργ。
第二步:首先应根据载机雷达系统的几何参数,确定波束在地面的投影区域,得到子块的取值范围,在该范围内逐点计算散射点在对应的成像结果中的位置。
第三步:通过插值操作将信号取出,放入以x-y坐标系为图像坐标系中的二维数组中,完成几何失真校正。
设任意地面校正网格P点的x-y坐标p(xp,yp,0),孔径中心雷达APC的坐标为c(xc,xy,0),则APC到成像区中心O(xof,yof,0)点的距离|OC|和APC到P点的距离|CP|分别为
P点在线性RD成像结果中的距离向坐标Nγp为:

P点的多普勒频率fdp取决于该点相对于孔径中心APC的距离变化率。即
为P点空间斜视角,见图3。同理,成像中心点O点的多普勒频率fdo为

因此,P点在线性RD成像结果中的方位向坐标Nfdp为
如上的散射点坐标定位换算要在每幅线性RD成像结果中逐点地进行,直到获得成像区内全部分辨率单元的对应关系。在理论上,得到地面校正P点在各幅图像中的对应位置后,就可以将其值取出来。由于通常得到的在绝大部分情况下不是整数,需要通过插值得到。
2.3 图像拼接
在天线扫描过程中,随着天线扫描过程中,对前面的图像要进行实时输出,满足大区域成像要求。方法如下:
(1)根据系统参数预先计算出波束扫描每个波束所能覆盖的地面范围,确定最终输出图像的大小和像素点对应的地理坐标值,在校正图像几何失真的同时,逐点将校正后的图像放入对应的坐标中,输出结果;
(2)设计系统时,定义成像区圆心转角大小恰为波束地面投影宽度的一半,在实测数据成像中,要消除子块之间的接缝,相邻子块间存在一定的复用;
随着相邻的单个扇形成像得到校正、存储与输出,最终可以在任何时刻成像过程的中间结果都可实时输出;
3 成像实例
根据上述算法分别进行子块成像和校正后的子块成像。首先进行子块成像和校正后的子块成像对比,具体如下:
(1)天线扫描至正前视方向子图与校正图对照,如图4所示。
(2)天线扫描至斜视方向子图与校正图对照,如图5所示。
(3)天线扫描至侧视方向子图与校正图对照,如图6所示。
5 总结
本文将环视“SAR”算法应于机载火控雷达的空地成像中,由于该方法是基于子块的成像拼接处理,所以在近距离、载机平台大机动条件下、大范围成像时有利于提高成像的分辨率,并同时校正成像过程中存在的几何失真,有利于进行目标的精确定位和识别。
[1]Yong Li,Daiyin Zhu.The Geometric-Distortion Algorithm for Circular-SAR Imaging,IEEE GEOSCIENCE AND REMOTE SENCING letters,VOL 7,NO.2,APRIL 2010:376-380.
[2]李勇.基于子孔径处理的机载与弹载的合成孔径雷达成像算法的研究[D].南京航空航天大学,2005.
[3]熊红林.机载双模SAR成像处理及硬件实现 [D].南京航空航天大学,2007.
[4]毛新华,朱岱寅,李勇,朱兆达.环视SAR几何失真校正误差分析及补偿技术研究[J].电子与信息学报,2008(11):2706-2709.
作者单位 南京电子技术研究所 江苏省南京市 210039
佴俊(1979-),男,江苏省扬州市人。大学本科学历。工程师。主要研究方向为机载雷达总体技术和机载雷达售后服务综合管理。
王波(1983-),男,湖北省武汉市人。工学硕士。工程师。主要研究方向为雷达系统技术。
猜你喜欢
智能计算机与应用(2022年10期)2022-11-05
航天电子对抗(2022年4期)2022-10-24
南京航空航天大学学报(2022年2期)2022-04-27
现代计算机(2021年36期)2021-03-14
同济大学学报(自然科学版)(2019年2期)2019-04-02
计算机应用(2018年12期)2019-01-07
电子科技大学学报(2016年2期)2016-08-31
火控雷达技术(2016年2期)2016-02-06
化工学报(2015年11期)2015-09-08
华东师范大学学报(自然科学版)(2014年1期)2014-04-16
