基于遗传编程的无量纲指标在行星齿轮箱故障诊断中的应用
2017-09-03 10:24胥永刚马伟峰马朝永
噪声与振动控制 2017年4期
胥永刚,马伟峰,马朝永,付 胜
(北京工业大学 机电学院 先进制造技术北京市重点实验室,北京 100124)
基于遗传编程的无量纲指标在行星齿轮箱故障诊断中的应用
胥永刚,马伟峰,马朝永,付 胜
(北京工业大学 机电学院 先进制造技术北京市重点实验室,北京 100124)
针对传统的信号处理方法较难获取行星齿轮箱故障特征和有量纲指标在变工况情况下诊断失效的问题,提出将无量纲指标应用于行星齿轮箱故障诊断的方法。首先分别计算行星齿轮箱在不同故障模式下振动信号的七个无量纲指标,然后用遗传编程的方法构建新的复合诊断指标,最后将该复合诊断指标在变载荷、变转速工况下对不同的故障模式进行区分。实验结果表明,该方法可以识别行星齿轮箱在不同工况下的故障状态,验证了其有效性。
振动与波;行星齿轮箱;遗传编程;无量纲指标;复合诊断指标;模式识别
行星齿轮箱具有体积小、重量轻、承载能力强、传动比大、传动平稳、效率高等优点,被广泛应用于航空航天、船舶、冶金、风力发电等机械行业[1]。但行星齿轮箱一般工作环境恶劣,承载载荷冲击较大,且需连续运转,其零部件极易出现损坏[2]。一旦出现故障将会给企业的生产带来极大影响,甚至产生巨大的经济损失。因此,行星齿轮箱的故障诊断成为本领域亟待解决的一个关键性问题。
行星齿轮箱由太阳轮、行星轮、行星架和内齿圈等部分组成。通常情况下,太阳轮绕自身的中心轴旋转,内齿圈与外箱体连接固定不动,行星轮固定于行星架上绕太阳轮公转的同时也绕自身的中心轴旋转并同时与内齿圈和太阳轮啮合[3]。其中,行星轮-太阳轮和行星轮-内齿圈的啮合点都是随着行星架的转动相对于传感器的位置时刻改变,因此传感器采集到的振动信号存在路径调制现象[4]。当内齿圈存在故障时,传感器采集到的振动信号被故障冲击所调制;当太阳轮存在故障时,传感器采集到的振动信号不仅被故障冲击所调制,还被太阳轮转频所调制;当行星轮存在故障时,传感器采集到的振动信号不仅被故障冲击所调制,还被行星架转频所调制;此外,行星齿轮箱的振动信号传递表现为明显非线性;因此行星齿轮箱的振动信号显得异常复杂。鉴于行星齿轮箱运动特性较为复杂,很难找出振动信号与故障模式之间的映射关系,因此传统的故障特征频率提取方法很难有效判别出故障模式。
指标作为机械设备运转过程中健康与否的衡量依据,被广泛应用于机械设备的在线监测和故障诊断[5]。然而,有量纲指标特征值的大小不仅与机械设备的运行状况有关,还与机械设备的载荷、转速、测点位置等参数有关。无量纲指标与机械设备的运行参数基本无关,对转速和负载的变化不敏感,因此是一种较好的诊断指标[6]。
为了弥补传统信号处理方法较难获取行星齿轮箱故障特征和有量纲指标在变工况情况下诊断失效的缺陷,提出了无量纲指标应用于变载荷、变转速行星齿轮箱的故障诊断中。在无量纲指标的基础上,运用遗传编程方法构建复合诊断指标,将该复合诊断指标应用于行星齿轮箱变载荷、变转速工况下的模式识别中。实验结果表明,通过无量纲指标构建的复合诊断指标可以有效区分出行星齿轮箱的故障模式。
1 遗传编程的原理
1.1 遗传编程概述
遗传编程是由遗传算法演化而来,是一种全局搜索寻优技术,是上世纪90年代由斯坦福大学的Koza J R首先提出[7]。遗传编程以不同层次的“树”型结构表达每一个个体,根据待求解的问题随机产生一系列的“树”,然后分别计算每棵“树”的适应度值,根据达尔文进化论优胜劣汰的原则,运用遗传算子(交叉、复制和变异)对种群不断迭代更新,直到达到预先设定的终止准则,得到给定问题的最优解。
1.2 遗传编程实现过程
遗传编程有三个主要的遗传算子,即复制、杂交和变异。其中复制操作是选择群体中适应度值较高的个体“树”直接进入下一代作为父代继续繁殖;杂交操作是产生下一代增加新个体的一种方式,扩大种群的搜索空间;变异操作是为了维持种群的多样性,增加获得更高适应度个体的机会,变异的方式有两种,分别是终端符变异和运算符变异。
图1为实现遗传编程算法的流程图,其中i表示个体计数器,N表示种群规模,Gen表示遗传代数。
2 无量纲指标的构建
2.1 运算符集和终止符集的构建
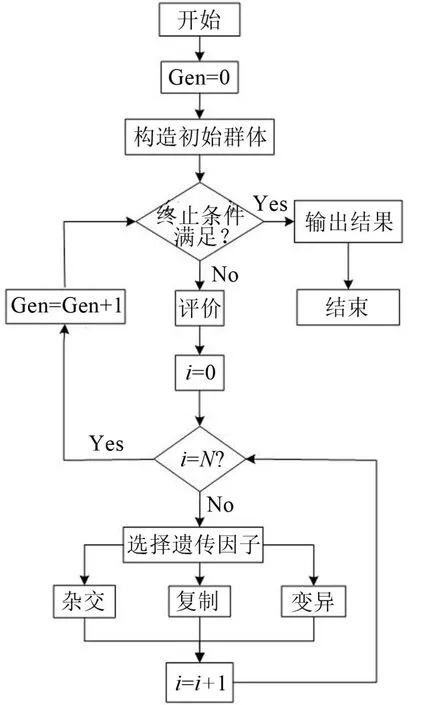
图1 遗传编程流程图
运算符集是处理各种终止符的操作函数的集合,文中采用加(plus)、减(minus)、乘(times)、除(Mydivide)、对数(Mylog10)、正弦(Sin)、余弦(Cos)方根(Mysqrt)等数学基本运算作为运算符的函数集。
终止符集是各种运算符操作对象的集合,文中选取的是对机械设备运行参数无关的七种无量纲指标,即X1、X2、X3、X4、X5、X6、X7,分别代表改进2阶原点矩[8]、偏斜度指标、峭度指标、波形指标、峰值指标、脉冲指标、裕度指标。其表达式如下
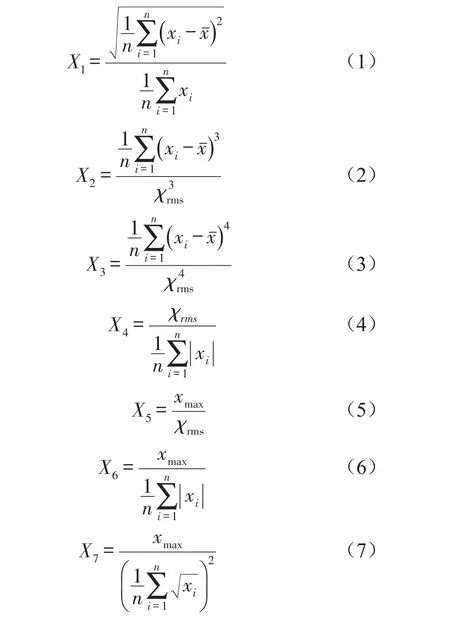
其中n为振动信号的数据长度,为振动信号的平均值,xmax为振动信号的最大值,χrms为振动信号的均方根值,且
2.2 适应度函数的确定
适应度函数[9]是用于评价在通过遗传编程构建复合诊断指标的过程中产生的每一个“树”型个体的适应度值,依据生物进化论优胜劣汰的观点,适应度值较低的个体将会被淘汰,适应度值较高的个体将会被保留作为新一代的父本。在故障诊断模式识别中,应使得各模式的类内离散度达到最小,类间离散度达到最大,即

式(8)中用方差Dw表示各个模式间的类内离散度,用模式m和n之间的平均距离Dmn表示两个模式间的类间离散度。为了得到最好的模式分辨效果,在遗传编程计算过程中,只要保留适应度函数值较大的个体,即可使得各模式间的类内离散度取得较小值,类间离散度取得较大值,进而实现最优分类。
2.3 终止准则的确定
在遗传编程计算过程中,通过复制、交叉和变异等遗传算子产生新的个体,在层次化的“树”型结构中不断迭代寻优,必须设立一定的停止准则作为程序运行的结束条件。文中终止准则有两条[8]:
(1)连续两代的最大适应度值变化小于设定的一个极小值δ,即

(2)进化到预先设定的最大进化代数。
其中达到任意一条终止准则,程序运行结束。
2.4 其他参数的确定
遗传编程作为迭代寻优的计算方法之一,需要人为设定一些参数来控制群体规模和种群多样性,选择合适的生长方式和生存方式来筛选出符合本次应用的最优复合诊断指标。在计算过程中的一些参数设定如表1所示。
表1中,种群个体的生长方式为Fullinit,即以饱满方式进行生长,个体“树”在生长过程中每一支达到最大树深后才会选择终止符集中的元素作为叶子节点。个体的生存方式为Keep best,即选择适应度值最高的个体进入下一代。

表1 遗传编程参数设置
3 应用实例
文中的研究对象为行星齿轮箱,实验台如图2所示。
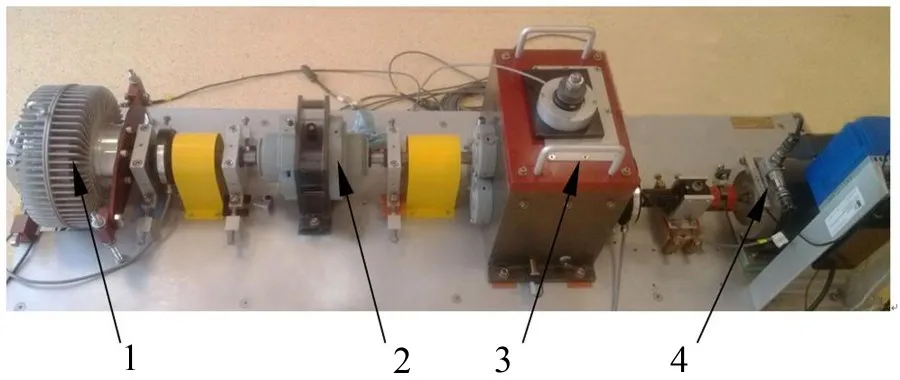
图2 故障模拟实验台
该实验系统由调频电机、二级减速箱、行星齿轮箱、磁粉制动器、振动加速度传感器、笔记本电脑等组成。其中调频电机用于改变行星齿轮箱输入轴的转速,磁粉制动器用于给该传动系统施加载荷。通过更换行星齿轮箱不同的故障部件,可以分别实现行星齿轮箱在不同转速、不同载荷下,不同部位的故障模拟。
3.1 复合诊断指标的构建
在驱动电机转速为2 700 r/min,磁粉制动器通电电流为1.76 A(载荷比例为80%)条件下,通过振动加速度传感器分别采集行星齿轮箱正常状态、行星齿轮箱太阳轮缺齿状态、行星齿轮箱行星轮缺齿状态三种模式下各50组振动信号,采样频率为12 800 Hz。根据式(1)至式(7)分别计算三种状态下振动信号的七种无量纲指标,各个原始指标对三类状态的分类曲线图如图3所示。
图3各个分图中0~50、50~100、100~150各个数据段分别表示行星齿轮箱正常状态、太阳轮缺齿和行星轮缺齿的无量纲指标。图3中(a)、(e)、(f)、(g)所示的无量纲指标在三种状态下的变化幅度存在较大程度的重叠或者无明显区别,不能用来正确区分行星齿轮箱的工作状态;图(b)代表的偏斜度指标可以明显区分出行星齿轮箱正常状态和太阳轮故障两种模式,而太阳轮-行星轮故障模式、正常-行星轮故障模式则分别混合到一起;图(c)代表的峭度指标可以区分出行星齿轮箱正常和故障两种模式,而两种故障模式之间却不能准确区分;图(d)代表的波形指标在三种状态下幅度有一定差别,但三种状态的类间离散度不够大,在模式识别过程中容易造成误判。
将上述各个指标通过遗传编程方法进行优化组合,最终筛选出分类效果最佳的组合“树”,见图4,根据图4得到新的复合诊断指标X,如式(10)所示。
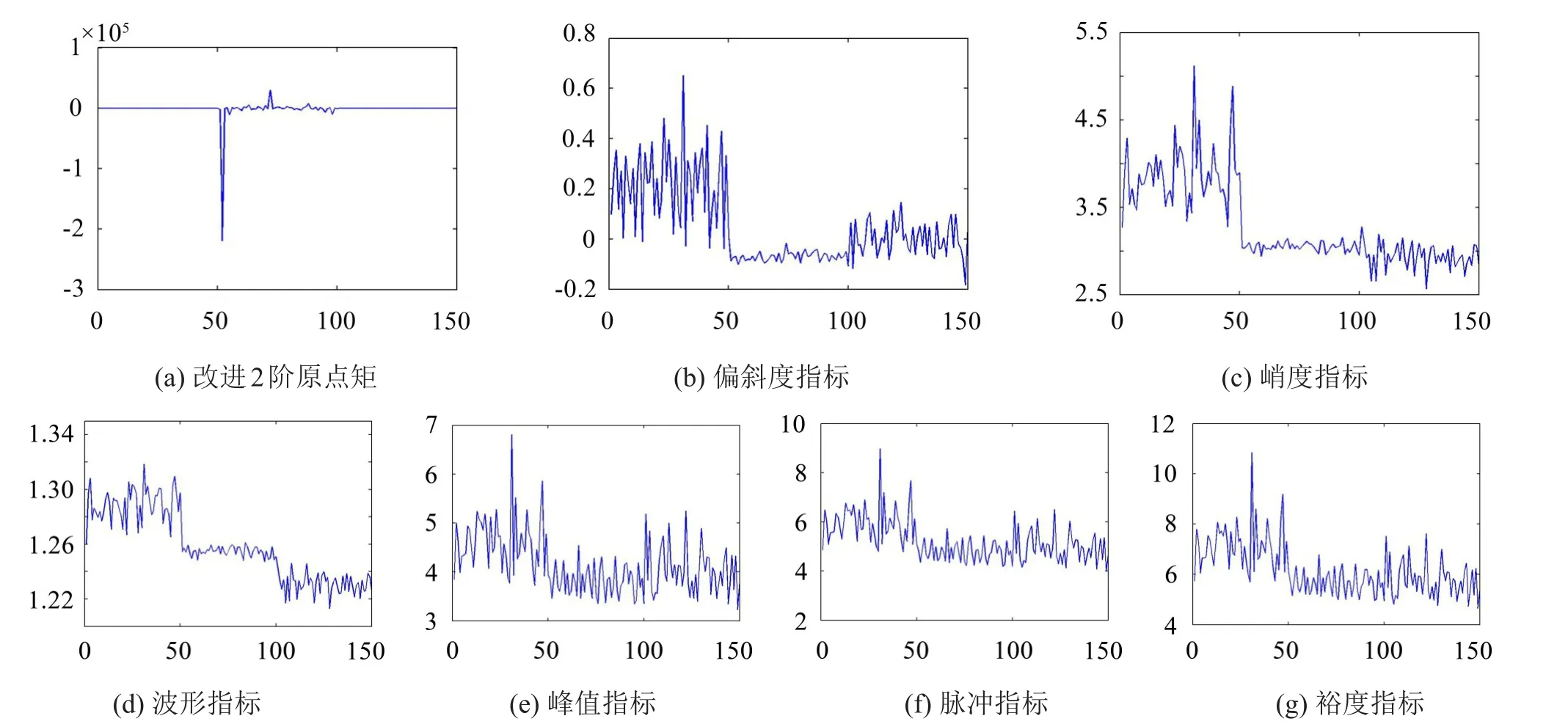
图3 不同模式下原始统计指标的曲线图
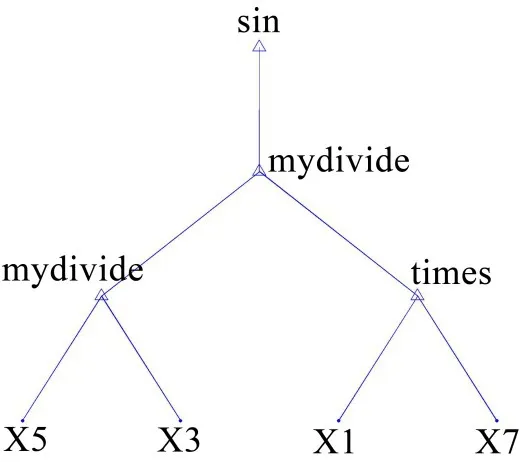
图4 新特征X树型结构

利用式(10)所示的复合诊断指标,对前述行星齿轮箱三种状态下的振动信号进行分类,效果如图5所示。
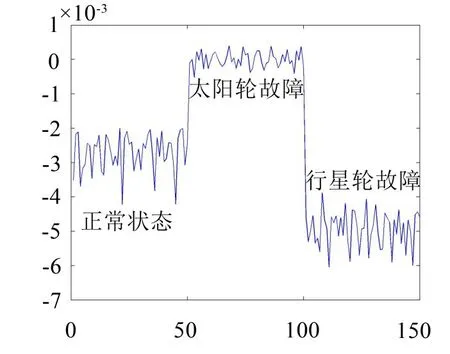
图5 不同模式下复合诊断指标的曲线图
由图5可见,该复合诊断指标使得各模式间类内距离达到最小,类间距离达到最大,三种状态一目了然,分类效果明显优于单个无量纲指标。
3.2 复合诊断指标在变载荷工况下的应用
在上述实验的基础上,保持电机转速不变,仍为2 700 r/min,磁粉制动器通电电流增大至2.2 A(载荷比例为100%),用图4所示“树”型结构所表达的复合诊断指标对测得的振动信号进行模式识别,分类效果如图6所示。
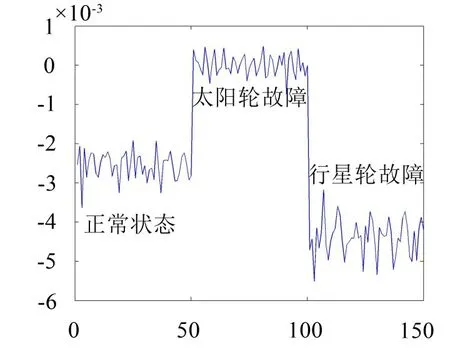
图6 变载荷工况下复合诊断指标在不同模式下的曲线图
显然,当载荷增大后,三种状态的类间距离依然比较明显,通过原来构造的复合诊断指标依然能够识别出行星齿轮箱在变载荷工况下的三种模式。
3.3 复合诊断指标在变载荷、变转速工况下的应用
将上述实验台电机的转速由2 700 r/min改变为2 100 r/min,磁粉制动器的通电电流仍为2.2 A(载荷比例为100%)。通过图4计算各个模式下采集到的振动信号的复合诊断指标并进行分类,结果如图7所示。
当改变行星齿轮箱的转速和载荷后,太阳轮故障和其余两种模式的距离依然比较大,易于区分;正常状态和行星轮故障两种模式的聚集中心有所靠近,但依然可分。因此,原来的复合诊断指标依然可以区分出行星齿轮箱在变载荷、变转速工况下的三种模式。
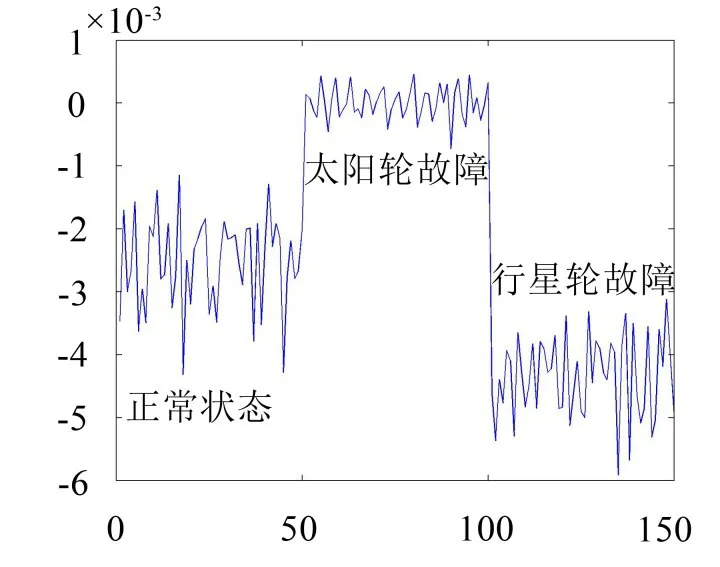
图7 变载荷、变转速工况下复合诊断指标在不同模式下的曲线图
4 结语
(1)在无量纲指标的基础上,运用遗传编程方法构造复合诊断指标,克服了常规的某一种指标对一种故障模式分类效果明显、对其他类故障模式分类无效的缺陷,降低了无量纲指标中次敏感指标在复合诊断指标中的权重,成功用于行星齿轮箱故障模式识别中。
(2)在行星齿轮箱故障模式识别过程中,复合诊断指标明显优于单个诊断指标。
(3)由无量纲指标构建的复合诊断指标对于机械设备的运行参数不敏感,可用于行星齿轮箱在变转速、变载荷工况下的故障诊断。
[1]雷亚国,何正嘉,林京,等.行星齿轮箱故障诊断技术的研究进展[J].机械工程学报,2011,47(19):59-67.
[2]冯志鹏,秦嗣峰.基于Hilbert振动分解和高阶能量算子的行星齿轮箱故障诊断研究[J].振动与冲击,2016,35(5):47-54.
[3]冯志鹏,褚福磊.行星齿轮箱齿轮分布式故障振动频谱特征[J].中国电机工程学报,2013,33(2):118-125.
[4]雷亚国,汤伟,孔德同,等.基于传动机理分析的行星齿轮箱振动信号仿真及其故障诊断[J].机械工程学报,2014,50(17):62-68.
[5]黄昭毅.对我国无量纲诊断的历史回顾与今后的期望[J].中国设备管理,2000(10):37-44.
[6]丁康,李巍华,朱小勇.齿轮及齿轮箱故障诊断实用技术[M].北京:机械工业出版社,2005:29-30.
[7]KOZA J R.Genetic programming:on the programming of computers by means of natural selection[M].Cambridge:MIT Press,1992.
[8]李良敏,屈梁生.遗传编程在无量纲指标构建中的应用[J].西安交通大学学报,2002,36(7):736-739.
[9]轩建平,史铁林,廖广兰,等.利用遗传编程提取齿轮多重故障分类特征[J].振动工程学报,2006,19(1):71-74.
Application of Dimensionless Parameters Based on Genetic Programming to Fault Diagnosis of Planetary Gearboxes
XU Yong-gang,MA Wei-feng,MA Chao-yong,FU Sheng
(Key Laboratory ofAdvanced Manufacturing Technology,Beijing University of Technology,Beijing 100124,China)
Due to the difficulty of obtaining the fault characteristics of the planetary gearbox through the traditional signal processing methods and the failure of the dimension parameters in the case of variable working condition,a method based on dimensionless parameters is proposed for the fault diagnosis of planetary gearboxes.First of all,seven dimensionless parameters in different failure modes are calculated,and the genetic programming is used to construct a new hybrid diagnostic parameter.Then,the hybrid diagnostic parameter is used to distinguish the different failure modes under the condition of variable load and variable speed.Experimental results show that,this method can identify the fault state of the planetary gearboxes under different working conditions.The validity of this method is verified.
vibration and wave;planetary gearbox;genetic programming;dimensionless parameters;hybrid diagnostic parameter;pattern recognition
TH165+.3
:A
:10.3969/j.issn.1006-1355.2017.04.034
1006-1355(2017)04-0175-05
2017-01-26
国家自然科学基金资助项目(51375020);北京市优秀人才培养资助项目(2011D005015000006)
胥永刚(1975-),男,河北省定州市人,博士,副教授,主要研究方向为机电设备状态监测与故障诊断。
E-mail:xyg@bjut.edu.cn
猜你喜欢
山东冶金(2022年3期)2022-07-19
空气动力学学报(2020年4期)2020-11-04
艺术品(2020年8期)2020-10-29
百科探秘·航空航天(2020年6期)2020-07-09
中学生数理化·八年级物理人教版(2019年5期)2019-06-25
宝藏(2019年2期)2019-03-20
读者(2018年20期)2018-09-27
传记文学(2017年9期)2017-09-21
制造技术与机床(2017年4期)2017-06-22
少儿科学周刊·儿童版(2016年1期)2016-03-14