
自适应全程滑模变结构在轨迹跟踪上的应用
2017-09-03 05:05:40王子瑜王海涛宋敬群
导弹与航天运载技术 2017年4期
王子瑜,李 君,王海涛,宋敬群
自适应全程滑模变结构在轨迹跟踪上的应用
王子瑜,李 君,王海涛,宋敬群
(北京宇航系统工程研究所,北京,100076)
针对高超声速飞行器(hypersonic reentry vehicle, HRV)轨迹跟踪问题,提出一种自适应全程滑模变结构轨迹跟踪方法。首先,基于最优化理论设计全程滑模面,使系统的轨线一开始便落在切换面上;其次,采用滑模变结构控制与自适应控制相结合的方法,根据辨识结果自动调整控制律,在保证稳定性的同时削弱抖振;最后,采用Lyapunov定理证明系统的稳定性,并在一定的干扰作用下,将所设计的跟踪算法进行数值仿真,通过与二次型调节器(linear quadratic regulator,LQR)跟踪算法进行比较,验证了控制器的有效性。
高超声速飞行器;全程滑模变结构控制;自适应控制;最优化理论
0 引 言
临近空间飞行器具有飞行速度快、飞行空域广、响应时间快的特点,不但突防能力强,而且能够实现快速机动部署,易于适应战场形势变化需要,近年来备受各国关注[1],但是飞行器的气动特性和大气环境随着飞行状态的变化将发生较大的变化[2],成为跟踪控制系统设计面临的重要问题。再入制导分为两个部分:纵向标准轨迹的设计和轨迹跟踪。Harpold在阻力加速度-速度平面设计了一个用于航天飞机的跟踪制导律,通过仅调整倾侧角完成了对标准轨迹的跟踪[3],成为再入制导发展史上的一个里程碑。
为了进一步提高系统的自主、自适应以及鲁棒性,很多学者在轨迹跟踪方面做了大量的研究。Dukeman利用线性二次型调节器(Linear Quadratic Regulator, LQR)设计了一个时变的反馈跟踪控制器,通过同时调整攻角与倾侧角在不同的初始条件下完成了对高度、速度和弹道倾角的同时跟踪[4]。但是这种方法一方面对精确数学模型依赖性大,另一方面当气动参数等发生较大变化时,鲁棒性较差。
滑模变结构控制(Sliding Mode Control,SMC)由于具有动态品质好、控制精度高、鲁棒性强、干扰抑制能力强的优点,成为一种控制不确定系统的有效方法[5]。从20世纪50年代苏联学者Emelyanov提出变结构控制方案起[6],滑模变结构以其独特的优点,广泛应用于机器人、工业控制、航空航天等控制领域[7,8]。但是,控制系统对不确定性的鲁棒性仅体现在滑动模态阶段,而系统在处于趋近模态阶段时,对系统参数摄动和外界干扰较为灵敏,同时变结构带来的抖振现象成为滑模变结构控制理论研究的重要内容。
因此,为了更好地提高系统鲁棒性,本文采用自适应全程滑模变结构控制方法进行跟踪制导,在变结构控制律中引入时变因子项,优化了滑模面的设计,消除了趋近阶段,使系统从初始状态到平衡点具有全过程鲁棒性。在此基础上,结合自适应方法对系统不确定性进行估计,大大减小了变结构的抖振现象。
1 滑动模态运动方程
考虑地球为不旋转圆球时,高超声速飞行器在航迹坐标系中相关无动力滑翔的无量纲质心运动方程为[9]
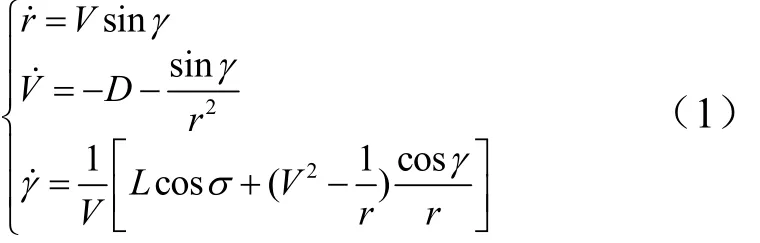
式中 r为地心距,无量纲化因子为地球半径R0=6 378 km;V为地球相对速度,无量纲化因子为侧角;L,D分别为升力加速度和阻力加速度,L=ρ(VcV)2SrefCL/(2mg0),D=ρ(VcV)2SrefCD/(2mg0),均为控制变量攻角α的函数,其中,ρ为大气密度,Sref为高超声速飞行器参考面积,m为高超声速飞行器的质量,CL,CD分别为升力系数和阻力系数。
整个滑翔阶段的标准轨迹用r*,V*和γ*表示,名义控制量攻角、倾侧角用α*和σ*表示,本文的目的就是设计一个具有鲁棒性的轨迹跟踪控制器,通过同时调整攻角与倾侧角,在气动参数发生大范围摄动的情况下完成对标准轨迹的跟踪。
定义x=[r Vγ]T−[r*V*γ*]T∈R3为状态偏差,(1)进行小扰动线性化,有:

式中
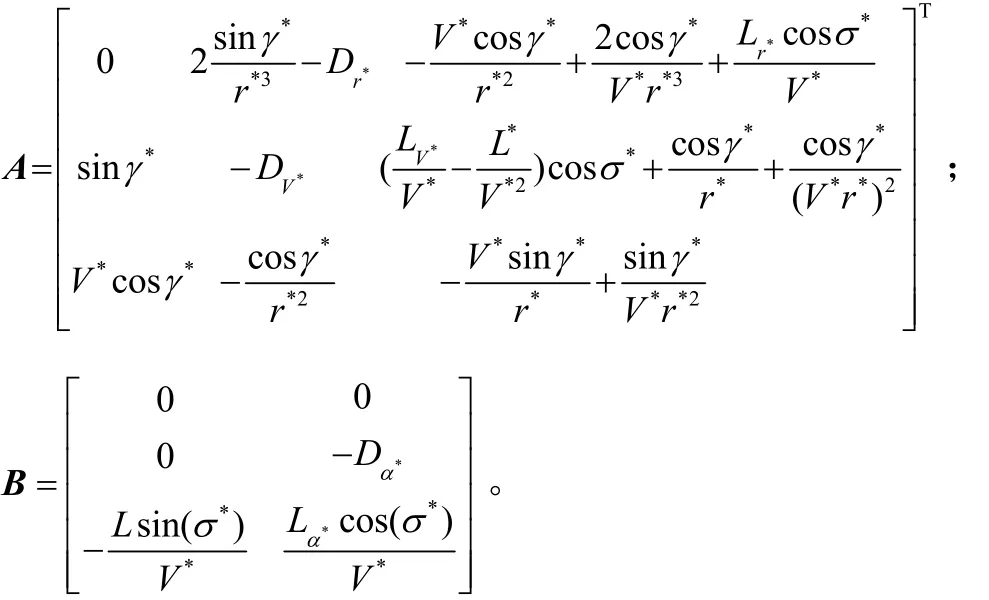
为升、阻力加速度对r,V,α的偏导数。最终纵向轨迹跟踪控制变量为

式(3)中的σ符号由类似航天飞机的横向制导方法决定,即设置随速度变化的航向角误差走廊,当航向角误差达到走廊边界时进行倾侧角符号的反向,使航向角误差有所减小。
2 控制器设计
2.1 系统描述
考虑下列非线性不确定被控系统:

式中 x(t)∈R3为状态变量;u(t)∈R2为控制变量,ΔA∈R3×3,ΔB∈R3×2为参数摄动矩阵;f为外界干扰及模型误差。
对于此系统作如下假设:
假设1:ΔA( x,t),ΔB( x,t)均为Lebesgue可测,对任意时间连续有界,ΔA˙( x,t),ΔB˙( x,t)一致有界。
假设2:存在矩阵A′,B′,f′使得ΔA=BA′,ΔB=BB′,Δf=Bf′。
假设3:存在正常数ςa,ςb,ςf,使得ΔA≤ςa,
考虑到A和B形式,式(2)可写成:

2.2 全程滑模面的设计
为了使系统轨迹一开始就落在滑模面上,因此引入一个随时间变化的全程滑模因子()tW,设计滑模切换函数为

式中 C1,C2为滑模设计参数,保证滑模面上系统状态稳定,C1>0,C2>0。不失一般性,选择C2=I2。Re(βi)>0(i =1,2,3)是全程滑动因子,使得系统状态开始就能处于滑模面上。
2.2.1 滑模参数矩阵C的设计
在滑模面上,将S=0代入式(7)得:则,系统的滑模运动方程为


式(9)描述的系统标称方程为

为了优化滑模面上状态的动态特性,设计性能指标为

式中 Q为状态加权矩阵。
由于在滑动模态优化问题中,滑动模的运动与控制量无关,因此取=R0,则式(11)可写成:

为了将最优滑动模设计问题写成二次性能指标下的一般形式,引入新的变量:

则,性能指标改写为

相应的标称滑动模方程为

由最优控制理论,在滑动模方程式(13)中,作为控制作用的向量υ其最优选择为
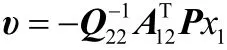
式中 P为下列Riccati方程的唯一解:

则有:

2.2.2 滑模移动参数iβ的设计
在全程滑模变结构系统中,1x的运动特性由滑模参数矩阵C的设计来保证,而2x的期望运动特性由滑模移动参数iβ来确定。
由式(7)以及=S0,有:

由式(10)可知系统期望的滑动模态运动为

式中 λ1为矩阵(A11−A12C1)的特征值。
结合式(15)、式(16),故而设计:

可以通过选择合适的2β和3β,使2x按照所期望的运动特性运动。
2.3 全程滑模态结构控制律设计
第2.2节中,滑模面的设计保证了系统在滑模面时具有鲁棒性。此节中将设计一个控制律在系统受到外界干扰及由于参数摄动而偏离滑模面时,能够在有限的时间内重新回到并且可靠地保持在滑模面上。
将假设2代入式(4),有:

式中 E为系统不确定性总和,E=A′ x+B′ u+f′。
设计自适应全程滑模变结构控制律为

式中 H=diag [−β1−β2−β3];ε为一个很小的正常数;K为常数对角阵;Eˆ为对不确定性总和E的估计,自适应控制律设计为

式中 η=diag[η1η2η3],ηi>0(i=1,2,3)
定理:对于不确定系统式(4)与切换函数式(7),如果满足假设1至假设3,在控制律式(19)的作用下渐进稳定。
证明:选择Lyapunov函数,有:

式中 E~=Eˆ−E。
由式(7)、式(18)至式(20)得:
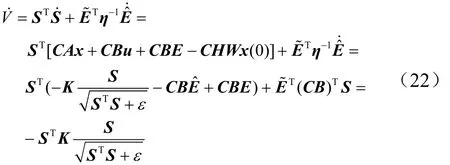
所以,有V˙<0(∀S≠0)
由式(22)可见Eˆ能够收敛到E,S能够收敛到0。
从S的定义式(7)可以看出,在有限时间内不确定系统的跟踪误差x能够渐近收敛至0。
因此,系统在Lyapunov意义下渐近稳定。
3 仿真分析
为了验证上述控制方法的有效性,分别利用自适应全程滑模变结构与LQR方法进行仿真,滑翔段射程为5 000 km。
初始以及终端条件为

气动参数摄动为

图1至图3为在气动参数摄动时采用自适应全程滑模变结构控制方法的参考轨迹与实际轨迹的对比。从图中可以看出即使气动参数存在大范围的不确定性,实际轨迹仍能较好跟踪标准轨迹。
图1 高度跟踪曲线
图2 速度跟踪曲线
图3 弹道倾角跟踪曲线
表1给出了分别采用自适应全程滑模变结构控制方法与LQR控制方法的终端误差对比。从表中数据可以看出自适应全程滑模变结构控制方法具有更好的跟踪效果,尤其是在速度状态的跟踪方面具有更强的适应能力与鲁棒性。
图4、图5给出了采用自适应全程滑模变结构控制方法的控制变量曲线,从图中可以看出采用上述的控制策略使得由变结构带来的抖振现象大大减小。
表1 仿真数值结果
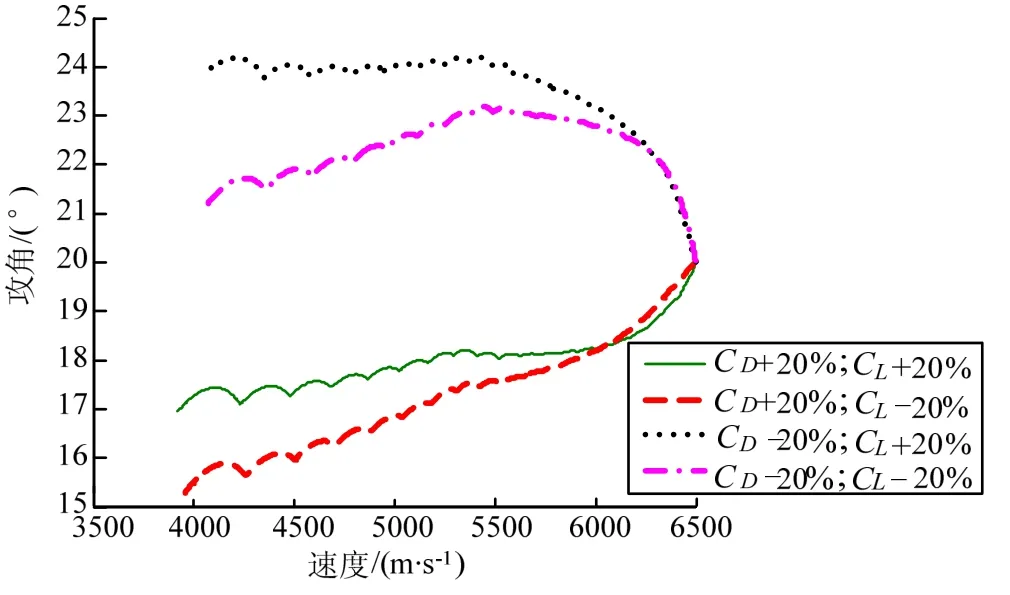
图4 攻角曲线
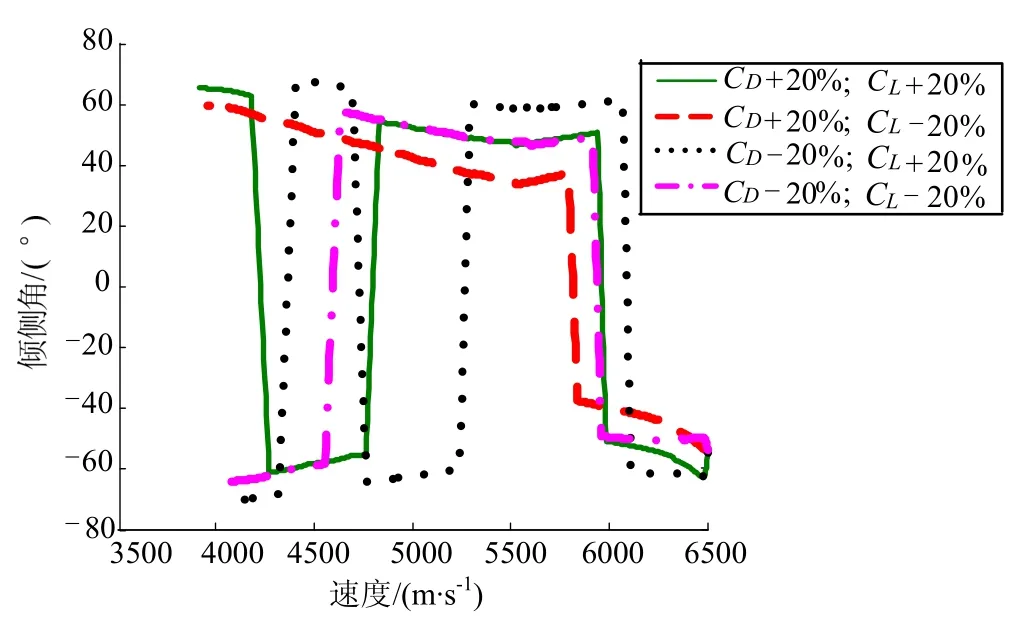
图5 倾侧角曲线
4 结 论
针对滑翔段轨迹跟踪问题本文提出了一种新型的自适应全程滑模变结构控制方法,采用自适应控制器在线辨识系统的不确定性误差,有效地减小了系统的抖振现象,在此基础上,利用Lyapunov稳定性理论证明了在存在参数摄动以及模型不确定性的情况下系统渐近稳定,并通过数值仿真,得到以下结论:a)在存在气动参数大范围摄动的情况下,采用自适应全程滑模变结构跟踪控制方法能较好的跟踪标准轨迹,与LQR方法相比,跟踪误差大大减小,鲁棒性大大增强。
b)采用自适应控制理论,系统抖振得到有效减弱,使跟踪控制器更易于实现。
[1] 张海林, 周林, 等. 临近空间飞行器发展现状及军事应用研究[J]. 飞航导弹, 2014(07): 3-7.
[2] Chaudhary A, Nguyen V, Tran H, Poladian D, Falangas E. Dynamics and stability and control characteristics of the X-37[C]. Montreal: AΙAA Guidance, Navigation, and Control Conference and Exhibit, 2001.
[3] Harpold J C, Graves C A. Shuttle entry guidance[J]. The Journal of the Astronautical Sciences, 1979, 25(3): 239-268.
[4] Dukeman Greg A. Profile following entry guidance using linear quadratic regulator theory[C]. Montreal: AΙAA Guidance, Navigation, and Control Conference and Exhibit, AΙAA 2002.
[5] Young K, Ozguner U. Sliding-mode design for robust linear optimal control[J]. Automatic-Oxford, 1997(33): 1313-1324.
[6] Hung J Y. Gao W, Hung J C. Variable structure control: a survey[J]. ΙEEE Transactions on Ιndustrial Electronics, 1993, 40(1): 2-22.
[7] Jing Y W, Mao Y E. Adaptive global sliding mode control strategy for the vehicle antilock braking systems[C]. St. Louis: American Control Conference, Hyatt Regency Riverfront, 2009.
[8] Li H M, Ye X. Sliding-mode PΙD control of DC-DC converter[C]. Taichung : Ιndustrial Electronics and Applications, 2010 the 5th ΙEEE Conference, 2010.
[9] Shen Z. On-board three-dimensional constrained entry flight trajectory generation[D]. Dissertation Abstracts Ιnternational, The Florida State University, 2002.
Application of Adaptive Global Sliding Mode Control Method in Trajectory Tracking
Wang Zi-yu, Li Jun, Wang Hai-tao, Song Jing-qun
(Beijing Ιnstitute of Astronautical System Engineering, Beijing, 100076)
A trajectory tracking guidance control law is proposed based on the theory of adaptive global sliding mode control, which can help solve the problem of trajectory tracking for HRV. Firstly, a global sliding mode surface is designed based on optimization theory, which guarantees the sliding mode motion of the system lie on the sliding surface at the beginning. Secondly, an adaptive reaching law is incorporated to estimate the system uncertainties, so that the chattering phenomenon is effectively relaxed. Finally, the robustness of the system is proofed by Lyapunov theory. Numerical simulations demonstrated the capability and effectiveness of the proposed method under the condition of aerodynamic data perturbations.
Hypersonic vehicle; Global sliding mode control; Adaptive control; Optimization theory
V448.235
A
1004-7182(2017)04-0059-05
DOΙ:10.7654/j.issn.1004-7182.20170414
2016-09-06;
2016-09-28
王子瑜(1985-),男,工程师,主要研究方向为电气系统总体设计
猜你喜欢
小雪花·小学生快乐作文(2021年1期)2021-05-17 19:52:36
建材发展导向(2021年23期)2021-03-08 01:05:34
农业机械学报(2020年2期)2020-03-09 07:35:30
中华建设(2019年7期)2019-08-27 00:50:18
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
项目管理技术(2016年12期)2016-06-15 20:29:33
西南交通大学学报(2016年6期)2016-05-04 04:13:11
Coco薇(2015年1期)2015-08-13 02:22:23
