
烟草打顶抑芽机无线控制系统设计与试验
2017-08-31 15:28刘双喜戚武振王金星张晓辉
农业机械学报 2017年8期
刘双喜 戚武振 王金星 张晓辉 王 震 李 伟
(1.山东农业大学山东省园艺机械与装备重点实验室, 泰安 271018; 2.山东农业大学机械与电子工程学院, 泰安 271018)
烟草打顶抑芽机无线控制系统设计与试验
刘双喜1,2戚武振2王金星1,2张晓辉1,2王 震2李 伟2
(1.山东农业大学山东省园艺机械与装备重点实验室, 泰安 271018; 2.山东农业大学机械与电子工程学院, 泰安 271018)
为改进现有智能烟草打顶机数据传输和烟草打顶高度精准识别不足等问题,增强检测算法的实用性和鲁棒性,设计了烟草打顶抑芽机无线控制系统。首先利用无线路由系统进行图像采集;然后采用MSRCR算法对图像进行预处理,消除光照对烟草高度识别的影响;再通过同心圆摄像机标定算法对烟花进行定位,确定打顶高度;最后通过单片机控制步进电动机和电磁阀分别进行打顶作业和抑芽剂的喷施。试验结果表明:该高度检测算法在静态试验下烟花识别率达到98.5%,摄像机标定精确度达96%,打顶准确率达95%。打顶准确率高,抑芽剂喷施精准,系统运行稳定可靠,满足烟草打顶的农艺要求。
烟草; 打顶机; 无线控制系统; 检测算法; 相机标定
引言
烟草打顶是烟草种植过程中的一个重要环节。烟草打顶后能够改善烟草中的营养分配,增加烟叶中的营养积累,提高烟叶质量[1]。但是,烟草打顶后腋芽的生长会影响烟叶的产量和质量,因此打顶后应在伤口处施用生长素类物质(抑芽剂)来抑制腋芽生长[2]。目前我国烟草打顶抑芽主要由人工完成,劳动强度大,生产效率低,因此,机械化打顶抑芽作业对于降低劳动强度,降低种植成本,提高生产效率有着极其重要的意义[3]。
欧美发达国家已经实现烟草打顶、抑芽和烟芽收集联合化作业,已有成熟的机械化装备[3]。我国烟草打顶抑芽机的研发还处于起步阶段,中国烟草总公司联合山东农业大学研制的烟草打顶抑芽机已经取得一定成果,但是还存在以下一些问题:检测算法不准确,易受环境光照影响;图像传输和控制部分布线复杂,系统不稳定;抑芽剂喷施模块不完善[4]。为此本文设计烟草打顶抑芽机无线控制系统,针对提出的问题进行改进:提出一种基于MSRCR算法的烟花识别算法;数据传输由有线改为无线;完善抑芽剂喷施模块,提高施药准确率。
1 控制系统整体设计与工作原理
烟草打顶抑芽机无线控制系统主要包括烟花高度检测算法和控制执行系统两部分。控制执行系统包括相同的两部分,可同时进行2行烟草打顶作业。控制系统原理图如图1所示。

图1 控制系统原理图Fig.1 Working principle diagram of control system
工作时首先由无线摄像头采集图像,由无线路由系统将图像传输给上位机,上位机通过烟花高度检测算法对图像进行处理,得到打顶高度H。然后nRF905无线通信模块将打顶高度H传输给下位机。最后下位机驱动步进电动机,调整割刀高度完成打顶作业。同时抑芽剂喷施模块通过对射式光电传感器采集烟株位置信息,将信息传输给下位机,由下位机控制电磁阀完成喷施作业。
2 检测算法设计
2.1 平台搭建与图像采集
图像采集系统所用摄像机为中国海康威视公司生产的DS-2CD3410FD型无线网络摄像机,摄像机抓拍速率为30 f/s,无线摄像机与工控机之间用WiFi传递数据,数据传输速率可达450 M/s,满足打顶作业速度要求。上位计算机为索奇T1510型工业控制机。
图像采集过程中,采集图像中通常包含多株烟草,背景复杂,造成烟花识别困难,故在2行烟株之间加装一块绿色背景板[4-5]。如图2所示,通过加装背景板,将目标烟株与其他烟株分开,对提高烟花识别速度、降低图像处理难度具有重要意义[4]。

图2 背景板影响对比Fig.2 Comparison of influence of background plate
2.2 图像分割
打顶作业是在露天环境下进行的,摄像机采集图像时会受太阳光照影响。图3所示2幅图像分别为晴天(室外照度10 000~100 000 lx)和阴天(室外照度3 000~10 000 lx)环境下采集的,可看出不同光照环境下烟花RGB色彩值不同,因此光照是影响烟花识别精度的重要因素[6-8]。

图3 不同光照环境下烟草图像Fig.3 Tobacco images under different illumination conditions
本文从图像形成机理出发,采用MSRCR算法对图像进行预处理。该理论认为一幅图像是由入射分量和反射分量构成的,分离入射分量可以剔除光照的影响,从而获得能反映烟花本来面貌的高频增强图像[9-14]。
针对烟花图像增强,MSRCR算法步骤为:
(1)读取烟花图像并转化为单通道double类型图像IR、IG、IB,分别对3幅图像进行处理,下面以IR为例。
(2)选取3个不同尺度,利用高斯函数计算出相应高斯模板。
(3)将IR先转换到对数域然后再转换到频域,分别用3个高斯模板对IR进行卷积,得到低频图像IRL1、IRL2、IRL3即烟花图像中的光照部分。
(4)用IR分别减去IRL1、IRL2、IRL3得到3个尺度下的高频增强图像IRH1、IRH2、IRH3,此时便消除了图像中大部分光照影响。
(5)取权重系数分别为(0.34,0.33,0.33)对IRH1、IRH2、IRH3进行加权平均,得到多尺度增强后的图像IRMSR。
(6)计算彩色恢复因子,计算出色彩恢复后的图像IRMSRCR,并对图像做进一步的修正得到I′R。
(7)最后将I′R、I′G、I′B合并获得完整的烟花增强图像I,具体算法流程图如图4所示。
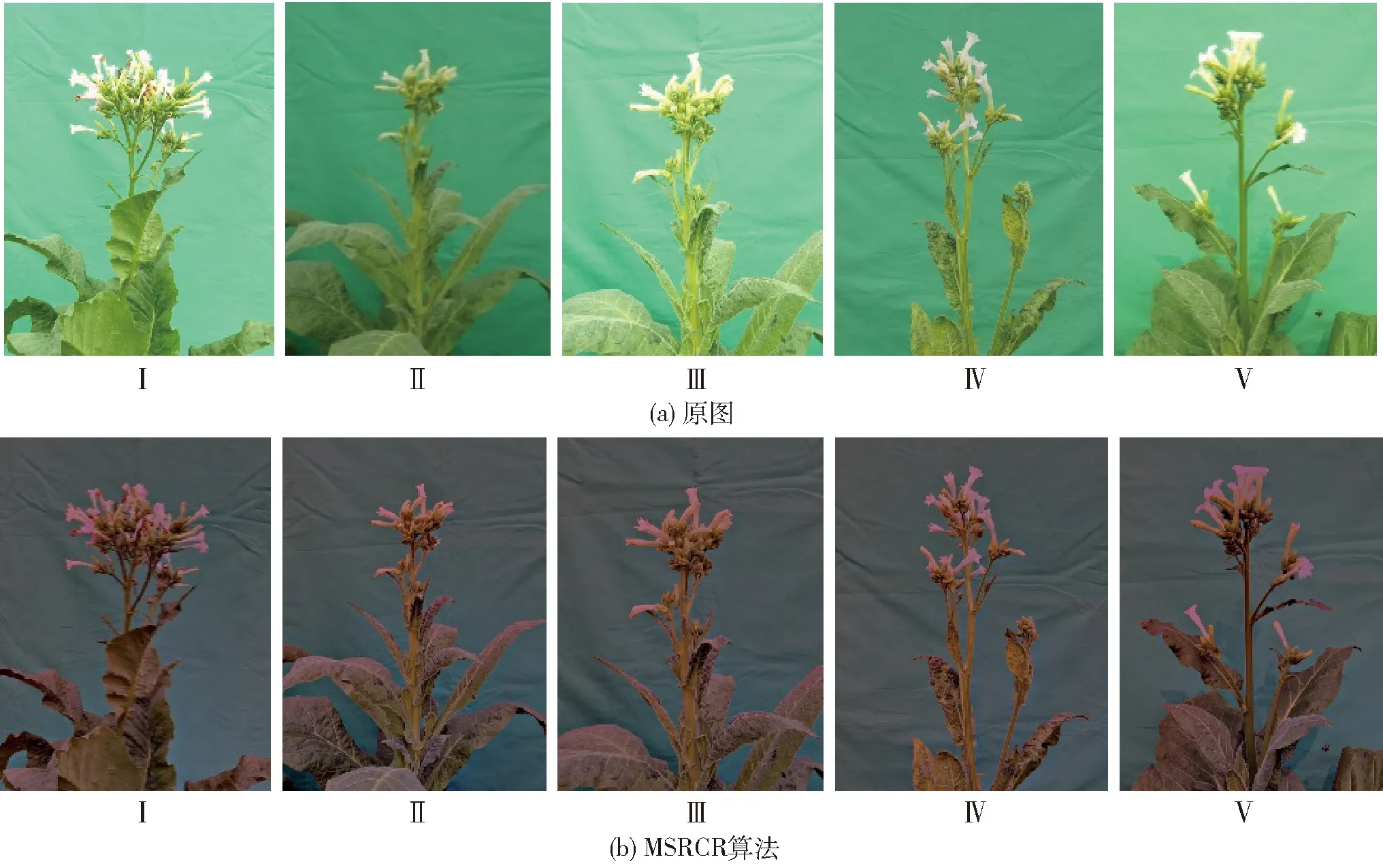
图5 图像处理效果Fig.5 Effect of image processing
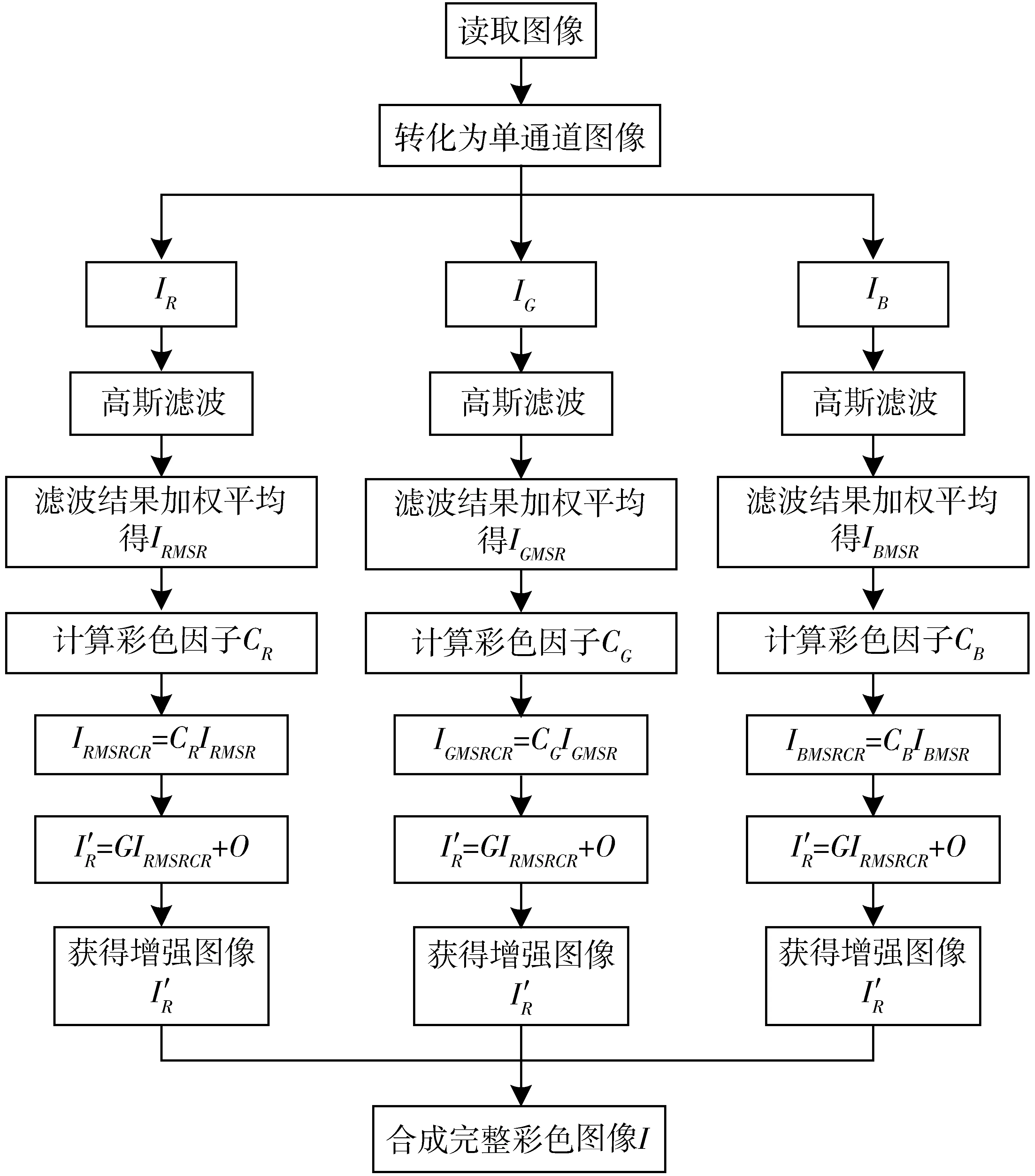
图4 MSRCR算法流程图Fig.4 Flow chart of MSRCR algorithm
经过MSRCR算法处理后的图像如图5所示。
烟花图像经MSRCR算法预处理后,提取各图像的灰度曲线,以图5中的5幅图像为例,得到图6所示的灰度曲线。
从灰度曲线可以看出,经过MSRCR算法处理后的图像,虽然出现失真明显、对比度降低等情况,但是像素的灰度绝大多数集中在80左右,减小了光源对图像的影响,增强了算法通用性,便于进行图像分割。根据灰度不同,像素点大致分为3部分,灰度在0~55范围内的少部分点主要是烟草茎秆和烟叶;灰度在55~105范围内的占绝大多数像素点,是图像中的背景部分和少部分烟叶;灰度大于105的是烟花和部分烟叶上的高亮点。对灰度曲线图局部放大,如图7所示,图中A区域中各图像的灰度曲线都出现了明显的跳变,说明这个区域就是背景和烟花区分的灰度值,为了过滤噪点,阈值取为偏大的115,就可以把烟花从图像中分割出来[15-16],算法分割效果如图8所示。
2.3 烟花定位
通过对烟花二值图像进行逐行遍历,以单行白点数目大于15个点作为烟花信息部分,将存在烟花信息的第一行到最后一行之间的高度区域确定为烟花区域。
由于光学成像系统存在畸变现象,导致图像中每个像素点所代表的实际距离不一致,需要对摄像机进行标定[17-19]。本文采用同心圆摄像机标定方法对摄像机进行标定,摄像机标定模板如图9所示。
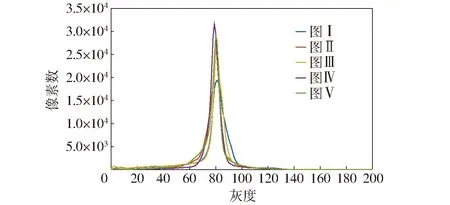
图6 灰度曲线Fig.6 Grayscale curves
如图10所示,本文所拍图像大小为640像素×480像素,第j1行到第j2行之间为烟花区域。将图像划分为3个同心圆,同心圆半径分别为实际长度100、200、400 mm。测得圆Ⅰ的半径所占像素数为N1=90,则C1区域内的图像标定常系数为

图7 灰度曲线局部放大Fig.7 Local enlargement of grayscale curves

图8 图像分割效果Fig.8 Effect of image segmentation

图9 摄像机标定模板Fig.9 Camera calibration template

图10 摄像机标定示意图Fig.10 Schematic diagram of camera calibration
(1)
式中R1——圆1半径实际物理长度N1——圆1半径所占像素数
同理测得另外2个区域内的图像标定常系数分别为K2=1.25,K3=1.33。
根据机械结构设计,割刀的初始位置是摄像机视场最顶端位置,即正对着图像的上侧边缘,因此割刀到达切割位置需要下降的高度H为
H=150K3+K2(j2-150)+60
(2)
为验证这种同心圆摄像机标定方法的可行性和精确度,取10株烟草进行验证。试验结果如表1所示,本算法的有效检测范围为1 600~2 000 mm。从表中可以看出试验中出现的最大误差为16 mm,精确度达到96%,符合设计要求。
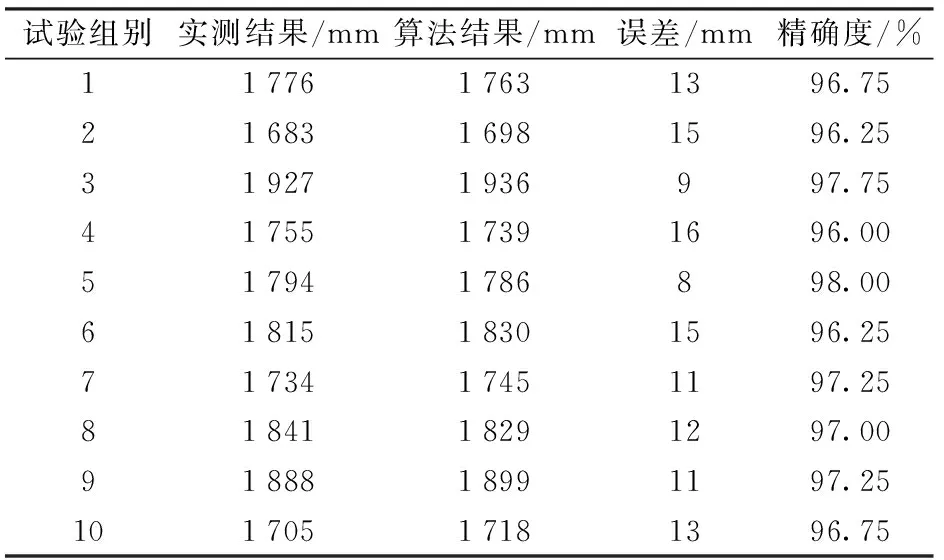
表1 摄像机标定精度测试Tab.1 Camera calibration accuracy test
3 控制系统
3.1 控制系统程序流程
控制系统程序流程如图11所示,软件运行界面如图12所示。首先加载对应的无线摄像机,摄像机抓拍的每一张图片都会输送至程序处理,直到程序检测到存在烟花的图像,摄像机停止抓拍。然后程序对烟花图像进行处理,通过识别算法找到烟花在图像中的位置,并且结合摄像机标定技术计算出割台要移动的实际距离H。由nRF905无线数据传输模块将距离信息传输至下位机[20],通过下位机执行打顶动作和抑芽剂喷施。最后返回图像采集环节进行下一次打顶作业。
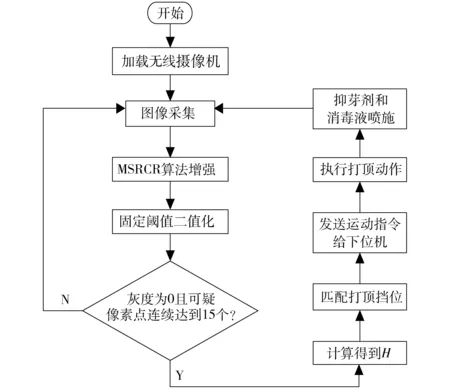
图11 控制系统程序流程图Fig.11 Flow chart of program of control system

图12 软件运行界面Fig.12 Software running interface
3.2 执行系统设计
执行系统由STC89C52RC单片机作为核心控制单元,主要由控制器电路、nRF905无线通信模块、对射式光电传感器、电动机和电磁阀等模块组成,核心功能是通过单片机控制电动机和电磁阀,完成打顶切割以及抑芽剂喷施等动作。
3.3 步进电动机选型
(1)步进电动机启动频率与工作频率计算
规范化种植的烟田烟草株距是0.5 m,进行打顶作业的机车车速为1.1 km/h,则完成一次打顶作业所用时间为

(3)
割台运动最大行程为400 mm,所用链轮为17齿,分度圆直径为71 mm,则割台运行完最大行程需要的转数为

(4)
选取的步进电动机的步距角θ为1.8°,由于转速较低,为保证电动机运行稳定,设定细分数为20。则最大行程所需的脉冲数为

(5)
考虑到极端情况是在1.6 s内割台要完成整个行程。则电动机的平均驱动速度为
(6)
由于是大惯量负载下的高速运动(割台总质量为40 kg),必须采用升频提速的方式来启动步进电动机[21-22]。设置步进电动机的启动频率为平均驱动速度的20%,即895 Hz,设置加速/减速时间为总时间的10%,则满足
m=(f0+f1)×1.6×0.1+1.6×0.8f1
(7)
式中f0——步进电动机启动频率f1——步进电动机工作频率
解得步进电动机工作频率为

(8)
综上可知,1.6 s内完成一个行程时,步进电动机的启动频率、运行频率和停止频率分布如图13所示。

图13 电动机脉冲频率折线图Fig.13 Curve of starting speed of motor
(2)步进电动机的启动力矩计算
步进电动机不同于一般电动机,步进电动机启动时的启动力矩等于负载力矩和负载惯性力矩之和。负载力矩即电动机提升重物所用力矩;负载惯性力矩包括输出轴上的链轮和提升的重物两部分产生的惯性力矩。因割台升降机构中设计有配重系统,因此负载力矩为零,只需计算负载惯性力矩[23]。
由力学知识可知,负载惯性力矩方程式为
M=Jα
(9)
其中
J=JL+JZ
(10)
(11)
式中J——负载的转动惯量JL——链轮转动惯量JZ——重物折算至电动机的转动惯量α——负载绕电动机主轴转动的角加速度r——链轮半径m0——链轮质量,为0.44 kg
重物折算至电动机的转动惯量JZ可根据能量转换原理求得
(12)
式中ω——转动角速度m1——提升的重物质量m2——平衡配重质量v——重物运动速度g——重力加速度,取9.8 m/s2h——重物上升高度
又因为m1=m2,解得JZ为
JZ=2m1r2
(13)
角加速度α为
(14)
式中T——步进电动机加速过程所用时间ω0——启动角速度ω1——工作时角速度
综上可求得

(15)
根据以上频率和力矩的计算,结合图14的步进电动机矩频特性曲线,选取型号为86BYG250B的步进电动机即可满足要求。

图14 步进电动机矩频特性曲线Fig.14 Torque frequency characteristic curves of stepping motor
3.4 抑芽剂喷施模块
抑芽剂喷施模块采用对射式光电传感器作为触发开关进行控制。将对射式光电传感器的收、发器两部分分别设置在割台的烟株喂入口两侧,电磁阀设置在喂入口后方500 mm位置。当有烟株喂入时,收发器之间被遮挡获得信号。单片机接收到传感器信号后,根据电磁阀和喂入口相对位置以及当前机车行进速度,计算延时T,经过T时间延时,打顶完成的烟株移动到电磁阀喷口,单片机控制电磁阀打开,完成抑芽剂喷施作业。
4 试验与结果分析
试验包括2部分:静态试验,机车不动,人工向烟花检测装置喂入带有烟花的植株,主要是检验识别算法的准确性、电动机机动性和定位的精确度;田间动态试验,对整机的综合性能进行测定。
4.1 静态试验
本试验在山东农业大学农机实验站进行,试验时开启无线摄像头、上位机和割台升降系统。由人工喂入烟花,试验分为晴天和阴天两组。试验时记录下算法计算出的割台移动位移,然后用高精度红外测距仪测量出割台实际的运动距离,并计算出定位误差。同时用秒表测量每一次试验用时,计算出平均耗时。
在晴天和阴天两种不同自然环境下试验结果如表2所示,可看出烟花识别率分别达到99%和98%,天气对识别算法的影响较小。烟花定位系统平均定位误差为5.35%,一次打顶作业平均耗时为1.60 s/株,整体满足烟草打顶农艺要求。

表2 静态试验结果Tab.2 Static test results

图15 田间动态试验Fig.15 Photo of field experiment
4.2 动态试验
田间动态试验在山东省诸城市舜旺烟农专业合作社烟田进行(图15)。该合作社具有大规模标准化种植的烟田(株距500 mm,行距1 200 mm),为机械试验的顺利进行提供有利条件。试验时间为7月中旬。机器动力为66 kW高地隙拖拉机,行车速度为1.1 km/h。试验样本为两行共1 000株烟草,试验结果如表3所示,打顶效果图如图16所示。
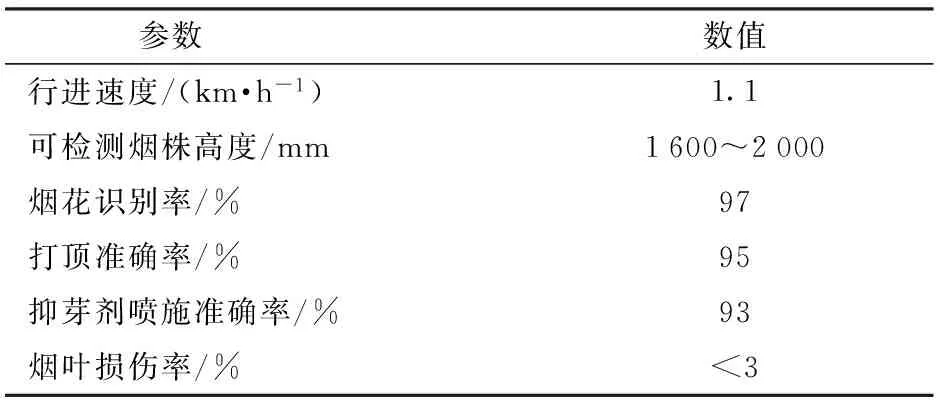
表3 田间动态试验结果Tab.3 Field experiment results

图16 打顶效果图Fig.16 Sketch of topping
从表3可以看出,机器的打顶准确率高,抑芽剂喷施精准。机器能够在烟草打顶过程中根据烟草植株的实际高度,实时调节打顶高度,实现烟草打顶和抑芽剂喷施一体化作业,满足设计要求。
机器在试验过程中也出现一些问题:有些烟花被识别到却没有打顶或没有在准确的位置打顶;烟叶损伤率较高。针对这些问题,分析其原因主要有:有的烟株花期较晚,花蕾还没有开放,呈黄绿色,引起算法误判;机器行进时相机偶尔发生抖动,使拍摄的图像模糊失真;个别烟株过高或过矮超出割台的行程,造成烟叶误伤或漏打。
5 结论
(1)设计了一种烟草打顶抑芽机无线控制系统。该系统采用无线摄像头采集图像,用基于nRF905的无线数据通信系统进行上位机与下位机之间的数据传输。
(2)提出了一种基于同心圆相机标定法的烟花定位算法,试验证明,用该算法进行烟花定位精确度达96%。
(3)提出一种基于MSRCR图像增强算法的烟花识别算法,该算法可克服环境光线对烟花识别的影响,静态试验中识别率达98.5%,田间动态试验识别率达97%。
1 林桂华, 周冀衡, 范启福,等. 打顶技术对烤烟产质量和生物碱组成的影响[J]. 中国烟草科学, 2002, 23(4):8-12. LIN Guihua, ZHOU Yiheng, FAN Qifu, et al.Effects of topping technology on leaf yield, quality and alkaloid content of flue-cured tobacco[J]. Chinese Tobacco Science, 2002, 23(4): 8-12.(in Chinese)
2 杨洁, 胡日生, 童建华,等. 打顶对烟草腋芽生长及植物激素含量的影响[J]. 烟草科技, 2013(10):72-75. YANG Jie, HU Risheng, TONG Jianhua, et al.Effects of topping on axillary bud growth of and plant hormone contents in tobacco[J]. Tobacco Science and Technology, 2013(10):72-75.(in Chinese)
3 WORSHAM A D, BURCH T B. Method and apparatus for simultaneously topping tobacco and controlling suckers with chemicals applied to cut stems by mechanical means: US, 6446420[P]. 2002-09-10.
4 刘双喜,李伟,王金星,等. 双行智能烟草打顶抑芽机检测控制系统设计与试验[J/OL]. 农业机械学报,2016,47(6):47-52.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160607&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2016.06.007. LIU Shuangxi, LI Wei, WANG Jinxing, et al. Design and test of testing control system for double rows intelligent tobacco topping machine[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016,47(6):47-52.(in Chinese)
5 范国强,杨庆路, 张晓辉, 等. 烟草夹持式智能打顶机的设计与试验[J/OL]. 农业机械学报,2017,48(7):121-126. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20170715&flag=1.DOI:10.6041/j.issn.1000-1298.2017.07.015. FAN Guoqiang, YANG Qinglu, ZHANG Xiaohui,et al.Design and experiment of clamping type intelligent tobacco topping machine[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2017,48(7):121-126. (in Chinese)
6 屠珺,刘成良,李彦明,等. 基于光照无关图的苹果图像识别方法[J]. 农业工程学报,2010,26(增刊2):26-31. TU Jun, LIU Chengliang, LI Yanming, et al. Apple recognition method based on illumination invariant graph [J]. Transactions of the CSAE, 2010, 26(Supp.2): 26-31. (in Chinese)
7 熊俊涛, 邹湘军, 陈丽娟,等. 基于机器视觉的自然环境中成熟荔枝识别[J]. 农业机械学报, 2011, 42(9):162-166. XIONG Juntao, ZOU Xiangjun, Chen Lijuan, et al. Recognition of mature litchi in natural environment based on machine vision[J].Transactions of the Chinese Society for Agricultural Machinery,2011,42(9):162-166.(in Chinese)
8 龚爱平. 基于嵌入式机器视觉的信息采集与处理技术研究[D].杭州:浙江大学,2013. GONG Aiping.Study of the information acquisition and processing technology based on embedded computer vision [D].Hangzhou:Zhejiang University,2013. (in Chinese)
9 安秋,李志臣,姬长英,等.基于光照无关图的农业机器人视觉导航算法[J].农业工程学报,2009,25(11):208-212. AN Qiu, LI Zhichen, JI Changying, et al. Agricultural robot vision navigation algorithm based on illumination invariant image[J].Transactions of the CSAE, 2009, 25(11): 208-212. (in Chinese)
10 冯亚丽, 黄静. 一种新的基于MSRCR光照补偿算法[J]. 计算机系统应用, 2012, 21(9):187-191. FENG Yali, HUANG Jing. Light compensation algorithm based on MSRCR [J].Computer Systems & Applications, 2012, 21(9):187-191. (in Chinese)
11 熊俊涛,邹湘军,王红军,等.基于Retinex图像增强的不同光照条件下的成熟荔枝识别[J]. 农业工程学报,2013,29(12):170-178. XIONG Juntao, ZOU Xiangjun, WANG Hongjun, et al. Recognition of ripe litchi in different illumination conditions based on Retinex image enhancement[J].Transactions of the CSAE, 2013, 29(12): 170-178. (in Chinese)
12 邹滨, 刘翱. 轮廓波变换与改进MSRCR的图像增强[J]. 计算机工程与设计, 2016, 37(6):1560-1566. ZOU Bin, LIU Ao. Image enhancement based on contourlet transform and improved MSRCR [J]. Computer Engineering and Design, 2016, 37(6):1560-1566.(in Chinese)
13 徐一初. 基于颜色恒常性的彩色目标检测[D].南京:南京理工大学,2013.
14 李锦, 王俊平, 万国挺,等. 一种结合直方图均衡化和MSRCR的图像增强新算法[J]. 西安电子科技大学学报:自然科学版, 2014, 41(3):103-109. LI Jin, WANG Junping, WAN Guoting, et al. Novel algorithm for image equalization enhancement with histogram and MSRCR[J]. Journal of Xidian University, 2014,41(3):103-109.(in Chinese)
15 周竹,黄懿,李小昱,等. 基于机器视觉的马铃薯自动分级方法[J]. 农业工程学报,2012,28(7):178-183. ZHOU Zhu, HUANG Yi, LI Xiaoyu, et al. Automatic detecting and grading method of potatoes based on machine vision[J].Transactions of the CSAE, 2012, 28(7): 178-183. (in Chinese)
16 李恺,杨艳丽,刘凯,等. 基于机器视觉的红掌检测分级方法[J]. 农业工程学报,2013,29(24):196-203. LI Kai, YANG Yanli, LIU Kai, et al. Determination and grading of Anthurium based on machine vision[J]. Transactions of the CSAE, 2013, 29(24): 196-203. (in Chinese)
17 王耀南, 陈铁健, 贺振东,等. 智能制造装备视觉检测控制方法综述[J]. 控制理论与应用, 2015, 32(3):273-286. WANG Yaonan, CHEN Tiejian, HE Zhendong, et al. Review on the machine vision measurement and control technology for intelligent manufacturing equipment [J]. Control Theory & Applications, 2015,32(3):273-286.(in Chinese)
18 苏洁. 光照变化下的视觉跟踪算法研究[D].哈尔滨:哈尔滨工程大学,2010.
19 BAIGVAND M, BANAKAR A, MINAEI S, et al. Machine vision system for grading of dried figs[J]. Computers & Electronics in Agriculture, 2015, 119:158-165.
20 曾明如,罗浩,徐小勇,等.基于ARM和nRF905组网的智能家居系统设计[J]. 计算机测量与控制, 2015, 23(4):1418-1420. ZENG Mingru, LUO Hao, XU Xiaoyong, et al. Design of a smart home system based on ARM and Network communication by nRF905 [J].Computer Measurement & Control,2015,23(4):1418-1420.(in Chinese)
21 荣盘祥, 何志军. 步进电机数字控制系统设计[J]. 电机与控制学报, 2009, 13(2):272-275.
22 马利强, 王金星. 烟草打顶消毒联合作业装置的设计[J]. 农机化研究, 2010, 32(5):136-138. MA Liqiang, WANG Jinxing. Design of device for tobacco topping and disinfecting[J]. Journal of Agricultural Mechanization Research,2010,32(5):136-138. (in Chinese)
23 杨旭海, 张茜, 胡斌. 棉花打顶机打顶高度自动控制系统的设计[J]. 农机化研究, 2009, 31(7):129-131. YANG Xuhai, ZHANG Qian, HU Bin.Design of automatic height control system for cotton’s top cuter[J]. Journal of Agricultural Mechanization Research,2009,31(7):129-131. (in Chinese)
Design and Test of Wireless Control System for Tobacco Topping Machine
LIU Shuangxi1,2QI Wuzhen2WANG Jinxing1,2ZHANG Xiaohui1,2WANG Zhen2LI Wei2
(1.ShandongProvincialKeyLaboratoryofHorticulturalMachineriesandEquipments,ShandongAgriculturalUniversity,Taian271018,China2.CollegeofMechanicalandEngineering,ShandongAgriculturalUniversity,Taian271018,China)
Tobacco topping operation was an important link during tobacco planting process. In order to solve the existing problems such as data transmission problem and tobacco topping height recognition problem of intelligent tobacco topping machine, and enhance the practicability and robustness of detection algorithm, a wireless control system for tobacco topping machine was designed. The system could control tobacco topping operation of two rows at the same time, meanwhile complete the integrated operation of tobacco flower identification, tobacco flower location, tobacco topping and sprout inhibitor spraying. The system working principle was as follows: firstly, wireless routing system was used for image acquisition on the machine. Then MSRCR algorithm was used to preprocess the image, so as to eliminate the illumination effect on the tobacco height identification. Then locating the tobacco flower area in the image by a concentric circle camera calibration algorithm and determining the tobacco topping height. Finally, through the control of single-chip microcomputer, stepping motor and pump were used to complete the tobacco topping operation and sprout inhibitor spraying operation, respectively. The test result showed that the tobacco flower recognition rate of the height detection algorithm under the static test can reach 98.5%; camera calibration accuracy reach around 96%, topping accuracy can reach 95%. The tobacco topping machine had a high topping accuracy rate, precise sprout inhibition, and high system stability, which met the agronomic requirement of tobacco topping.
tobacco; topping machine; wireless control system; detection algorithm; camera calibration
10.6041/j.issn.1000-1298.2017.08.005
2016-11-14
2017-02-22
中国烟草总公司科技重点项目(110201302019)
刘双喜(1978—),男,副教授,主要从事图像处理和模式识别研究,E-mail: shuangxiliu168@163.com
王金星(1970—),男,教授,博士生导师,主要从事精密工程与科学仪器研究,E-mail: jinxingw@163.com
S224
A
1000-1298(2017)08-0053-08
猜你喜欢
儿童时代·快乐苗苗(2022年10期)2022-12-09
作文周刊·小学二年级版(2020年44期)2020-12-03
汽车维修与保养(2020年11期)2020-06-09
趣味(数学)(2019年3期)2019-06-12
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
中国惯性技术学报(2017年1期)2017-06-09
中国公共安全(2017年11期)2017-02-06
电子制作(2017年23期)2017-02-02
办公自动化(2016年18期)2016-12-17
