
基于嵌入式系统的异纤清除机设计与试验
2017-08-31 15:28孙世磊石文轩邓德祥
农业机械学报 2017年8期
张 晨 孙世磊 石文轩 曾 霖 邓德祥
(1.武汉大学电子信息学院, 武汉 430072; 2.武汉大学国际软件学院, 武汉 430072; 3.武汉大学遥感信息学院, 武汉 430072)
基于嵌入式系统的异纤清除机设计与试验
张 晨1孙世磊2石文轩3曾 霖1邓德祥1
(1.武汉大学电子信息学院, 武汉 430072; 2.武汉大学国际软件学院, 武汉 430072; 3.武汉大学遥感信息学院, 武汉 430072)
基于FPGA+DSP的嵌入式系统以其灵活的芯片选型和高功效的计算性能,适合在环境恶劣以及对系统在线实时运行有严格要求的农业分拣领域中应用。针对棉纺产线中的异纤清除机设计,从检出原理、系统软硬件和剔除系统方面讨论了基于嵌入式系统的设备设计。检出原理方面,除常见的白光和紫外光检测外,在不增加相机的情况下通过增加偏振通道来增强透明地膜检测。在系统软件设计方面,提出了基于三线阵相机亚像素空间分离量测速方案和基于统计学习的阈值检测。在系统硬件方面,设计了具有功耗和物料成本优势的嵌入式相机数据处理平台,并移植优化算法以满足系统实时性需求。在剔除系统方面,设计了基于目标实时速度的控制方案。试验结果表明,测速方案能正确获取目标速度,并能在剔除系统测试中适应风速变化,准确打击。设备对棉花带有明显差异的异纤及带有荧光粉的丙纶丝和透明薄膜的检出率高于80%,而对接近棉花颜色的淡黄色异纤检出率稍低于80%。长期试验结果显示,异纤清除机能适应产线变化,操作简便,能检出国内现有常见异纤,性能稳定。
异纤清除机; 棉花异性纤维; 机器视觉; 嵌入式系统; 亚像素空间分离校正
引言
毛发、丙纶丝、毛线、地膜、碎布等异性纤维(简称异纤)是影响棉纺产品质量的重要杂质,如何快速准确的将混杂在原棉中的异纤分拣识别并挑选出来是棉纺行业最为关注的焦点之一[1-8]。作为农业机械分拣设备中的一种,异纤清除机因能在线稳定高效地剔除高速棉流中的异纤,而成为国内生产线的主要设备。
在异纤清除机设计中,高速图像数据处理系统设计与实现占有重要地位。农业分拣设备工作现场通常高温、高湿度、高粉尘,并常有将分拣设备嵌入原产线进行升级改造的需求,所以对设备的功耗和硬件稳定性要求较高。此外图像处理系统还需在线实时处理图像数据,并控制剔除系统进行检出。针对上述应用特性,基于FPGA+DSP的嵌入式方案,因其在数学运算中突出的功耗效率比[9-12],具有支持硬实时应用(Hard real-time application)的能力,以及丰富的工业级芯片种类,适用于农业分拣设备的低成本、小型化和高可靠性设计。
关于异纤检测算法和系统设计的研究较多[1-8],但是针对在线实时性要求下的算法结构设计,以及产线适应性的研究较少。针对嵌入式系统设计的研究多为处理系统的实现细节[13],有关整机系统层面的全面研究较少[14]。
本文基于异纤检测检出原理,通过分析拍摄图像的特征,设计检测算法,并着重研究能增强生产线适应性的技术。根据算法特点设计图像处理硬件系统和剔除机构控制方案。最终将包含嵌入式系统在内的异纤清除机整机设备实现,并安装于实际生产线进行长期试验和测试。
1 基于嵌入式系统的异纤清除机系统设计
1.1 异纤清除机整体设计
异纤清除机结构如图1所示,由输棉管道、相机、光源、高压喷阀以及除杂风机等组成。相机拍摄输棉管道中被灯管从管道正反两面照射的棉流,并在每组相机对面设置背景条以生成无棉覆盖区域拍摄背景。

图1 异纤清除机结构图Fig.1 Structure diagram of foreign fiber detecting machine1.输棉管道 2.气流方向 3.除杂风机 4.背景条 5.相机 6.白光/紫外光灯管 7.羽毛 8.丙纶丝 9.塑料薄膜 10.棉花 11.高压喷阀 12.高压气流
1.2 异纤清除机检出方案设计
传统筛选感知系统由光电二极管和超声波等方式实现,随着半导体行业的发展与升级,线阵相机被越来越广泛地应用于检测。文献[4,6-7]采用高速线阵相机拍摄处于测试通道中移动的棉花。本文使用基于安森美公司KLI2113型传感器的三线阵传感器相机,该相机像元数为2 098,每通道像元点频为20 MHz。经过定制改造,在启用三线空间校正模式下,相机行频flinerate仍保持为最高的9.2 kHz[15]。
异纤的检出原理主要利用棉花和异纤在不同光谱反射特性下的差异性,在实际应用中良好的光照方案可以突出检测目标的特征,有效降低算法的复杂度。文献[1]测试并总结了异纤的检测波段,在实践中常见的检测方式为白光与紫外光[2]。本文在紫外光通道中增加偏振光通道,利用光测弹性的干涉效应提高透明薄膜的检出率。此方案为紫外光偏振通道混合检测,相机数量较原白光和紫外光方案并无增加,具体设置如图2所示。

图2 紫外光及偏振光路设置Fig.2 UV and polar illumination system1.相机 2.检偏器 3.紫外光灯管 4.输棉管道 5.被摄物体 6.起偏器 7.偏振光源
其中,紫外光灯管布置在输棉管道两侧;偏振灯管布置在相机拍摄的中线上,并与相机间设置起偏器、检偏器2块偏振玻璃;被摄物体与相机只间隔检偏器。此光路设计中,原紫外检测相机仍旧能透过检偏器检测荧光反应异纤,相对于文献[16]中紫外与偏振相机分离方案,可在不增加相机数量的条件下增加透明薄膜的检出率。增加偏振光路设计后,异纤检出类型将覆盖我国大部分常见异纤种类。
1.3 异纤检测算法设计
典型目标检测算法流程图如图3所示。

图3 目标检测算法流程图Fig.3 Flow chart of target detection algorithms
为快速准确地提取目标,检测算法通常采取由粗到精,算法复杂度由简单到复杂的策略。图3中前2步用于从全图中快速提取出候选区域并初步确认,在计算上利用最明显且简单的方式,例如灰度统计、边缘信息等确认目标的可能区域。后2步中,先利用精细特征,如尺寸、纹理、面积、不变矩、统计特征等对较小的候选区域进行运算量稍大的分析,去除误判虚景后,得到检测目标区域,然后根据特征提取分类方式如神经网络分类器等复杂算法对目标进行分类识别,从中挑选有价值目标。
根据检测算法流程分析,目标确认算法输出的检测信息已经能够保证检出效果,即使只有少量运用复杂度最高的目标分类识别算法,系统在安装调试后也能达到较好的检出率。按此思路设计的检测算法并行度高,复杂度较低,较适合嵌入式方案实现,但是算法设计时将更加依赖实际拍摄特征。所以设计算法时应从拍摄图像特征出发,设计算法流程,并着重增强算法对实际拍摄环境适应性。根据设备实际拍摄情况特性,可以得到下列图像特征,用于算法流程设计:
(1)在白光、紫外光和偏振光设置中,异纤与棉花有色差或边缘梯度差异。
(2)异纤数量相对于棉花数量为较小值,所以在统计上占主要部分的是棉花与背景值,经过调试后,棉花与背景间的梯度和色差都较小。
(3)棉花种类变化时,拍摄图像中棉花部分会发生变化,但异纤数量在总量中占比仍较小。
(4)根据异纤材质不同,以及风速和附着棉团尺寸不同,实际速度会有差异。
基于上述4点图像特征,本文设计的算法流程如图4所示。
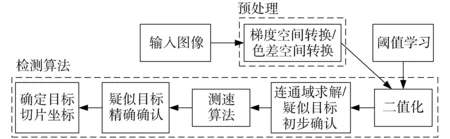
图4 异纤检测算法流程图Fig.4 Flow chart of fiber detection algorithms
算法在设计时分为非实时性的阈值学习部分,以及有实时性要求的梯度空间及色差空间检测部分。通过开机后的阈值学习,完成算法对生产线状态的适应,然后进入检测状态完成异纤检出,并定时重新学习阈值和统计棉速均值以适应生产线变化。
1.3.1 基于色差和梯度空间的目标检测算法
根据检出原理分析以及设备图像特征,检测算法可利用异纤与棉花在色差空间和梯度空间的特征区别进行设计[8]。在色差检测中,可选择将原始RGB空间的图像数据转化至较符合人眼感受的Lab空间进行色差分析。基于国际照明学会(CIE)的Lab均匀颜色空间定义,两点间色差可表示为
(1)
式中 ΔL——两点间L通道差值 Δa——两点间a通道差值 Δb——两点间b通道差值
为更好适应异纤清除机实际工作情况,分别对式(1)中的各变量差值增加权重系数。
(2)
其中
α+β=1
(3)
式中α、β——权重系数,取值为0~1
通过式(2)、(3)调整各分量在色差计算中所占比例。
梯度空间转化可用梯度算子实现。鉴于图片中异纤的方向是随机的,在设计中采用拉普拉斯算子提取梯度信息。该算子具有实现简单、为同性微分算子且具有旋转不变性的特点。一个二维图像函数的标准拉普拉斯变换是各向同性的二阶导数,其离散形式为
f(x,y-1)-4f(x,y)
(4)

为保证检出率,需对图像中R、G、B3通道全部进行梯度空间转化。
1.3.2 阈值选取算法设计
通过二值化对图像进行分割时,阈值选取是难点,传统研究的对象是挑选过的包含异纤的切片检测数据,此时大津法是最常用的计算图像阈值的方法。但是在实际应用中棉花和背景在统计中占绝对主体部分,异纤仅占非常小的部分,若棉花与背景融合较好,则直方图分布中只有一个波峰,此时需要直方图中有2个波峰的大津法进行阈值提取效果不明显。若采用更复杂的算法,计算量会有明显的上升。为解决上述问题,在算法设计中可通过统计特性求取梯度或色差通道阈值。
图5为安装调试背景与棉花亮度后,产线正常走棉工况下的典型图像。背景(红点处)R、G、B值为112、113、112,棉花根据厚度可分为接近边缘的较薄部分(绿点处)以及靠近中央较厚部分(蓝点处),其R、G、B值分别为121、119、120和112、108、115。背景部分的梯度及色差差异接近于零,并且棉花与背景的交界处有较小的梯度及色差变化,此外棉花开松后的厚度是向中心逐渐缓慢增加,上述现象导致棉花表面图像产生连续的变化,所以棉花及背景图片的直方图统计特性体现为:接近灰度值零点附近呈现概率分布较高的“尖峰”。实现中采用统计的方式,将梯度和色差检测最末尾固定百分比的点对应值设定为阈值,并且根据工程经验设置最小保护值。在棉花发生变化后,虽然棉花与背景梯度及色差发生变化,但是异纤所占比例仍旧是一较小值。此方法在实践中,能在大量无效的棉花和背景数据中高效率挑选疑似目标,通过调整阈值对应的百分比数值,即可保证不漏掉检测目标。

图5 背景、棉花与墨绿色异纤的现场拍摄图Fig.5 Live shot of background, cotton and foreign fiber
1.3.3 目标测速算法设计
现场应用时疑似的目标速度与其所附着的棉团尺寸有关,为一变化值,并且目标速度影响图像数据中检出目标的实际纵向尺寸计算,如不能将每个检出目标的速度信息及时更新,会造成大量误判。文献[17]描述了一种利用上下重叠放置的2台相机,通过图像匹配进行测速的方法。但是此方案需要增加一台相机进行测速,并且叠放的2台相机拍摄数据相同,无法提供更多信息。本文选用的三线阵相机含有空间分离的3条传感器,通常在使用中,采用人工或测速装置输入速度信息,用以调整3条传感器间的数据修正量,即空间分离量[18]。但是棉纺产线实际应用中,棉花在管道中高速运动,不能通过接触式测量获取速度,如简单采用平均速度,不能准确体现目标信息,所以需要研究针对每个疑似目标的测速方案。
通过理论可推导目标速度V与三线阵相机空间分离量n、相机行频flinerate以及光学放大率M的关系式为
(5)
式中u——物距,mmv——镜头焦距,mmΔd——三线阵传感器中两通道间距,文中取112 μm
当相机设置完毕后光学放大率和行频为固定值,若能估算出两通道间亚像素级空间校正值,即可计算得出拍摄目标的精确速度,并推知准确的目标纵向分辨率。
亚像素级三线分离量估算可以通过对相机拍摄图像中不同谱段的数据,使用基于灰度空间的归一化相关系数(Normalized correlation coefficient, NCC)和鲁棒性强的二次曲线拟合相结合的亚像素匹配算法推得,计算步骤如下:
(1)图像I1和I2间相同大小,但是互相有位移的数据间归一化相关系数的计算式为
(6)
式中F1、F2——图像I1和图像I2中区域面积相同的图像数据
p——图像区域的中心坐标点
wp——位移
(2)求取归一化相关系数Φ(p,wp)的极值点,可首先对其最大值点及附近点使用二次曲面f(x,y)进行拟合估计。
f(x,y)=α5x2+α4y2+α3xy+α2x+α1y+α0
(7)
式中α0、α1、α2、α3、α4、α5——二次曲面拟合系数
引入拟合系数向量X,并结合式(7)可得
AX=B
(8)
其中X=[α5α4α3α2α1α0]T
(9)
(10)
B=[f0f1f2f3f4f5]T
(11)
向量X通过式(8)~(10)的伪逆矩阵法求得
X=(ATA)-1ATB
(12)
求得拟合系数向量X后,利用求导法,即可得到二次曲面f(x,y)的极值坐标(xmax,ymax),该坐标数值即为亚像素三线分离量。
(13)
由式(13)可推得极值点(xmax,ymax)与拟合系数的关系为
(14)
基于二次曲面拟合的亚像素匹配方法精度在文献[19]中有讨论,最大有0.1个像素点的误差。
1.4 基于嵌入式系统的图像数据处理系统设计
在相机数据处理板卡中,核心数据处理芯片的选型占重要地位。较常见的核心芯片构架有:CPU/ARM、GPU、FPGA、DSP等。针对上述各芯片构架的讨论和应用,近年研究观点如下:
(1)相较于CPU/ARM,DSP和GPU更适合进行大规模数学运算。在运算速率指标上,GPU高于DSP,但是在功耗效率指标上,DSP占有优势[9]。
(2)GPU相较FPGA在开发难度和高性能运算领域应用中优势明显,而FPGA则能以较低的频率实现如中值滤波等运算,功耗效率较GPU有优势[10]。
(3)在最新的报道中,也有使用GPU实现实时目标检测的研究[11]。但是该报道中也存在如下问题:嵌入式GPU在开发时,只能以Nvidia TX1板卡套件或核心板形式进行,并不单独提供GPU芯片供用户自行设计电路系统。此外GPU应用时必须基于大型操作系统例如Linux,而Linux在硬实时应用中通常还需要额外改造[12]。
综上所述,为了在线实时处理相机三通道输出的60 MB/s的数据,并考虑到设备功耗以及驱动剔除系统的硬实时需求,本文设计了如图6所示的基于FPGA+DSP方案的嵌入式处理板卡,其中FPGA选用工业级EP3C55F23I7,DSP选用文献[13]中DSP DM642的后续升级版本(工业级DM648),并使用轻量级硬实时TI-RTOS作为板卡操作系统。嵌入式板卡高速数据输出选用千兆网口接口,增强板卡间组网能力,能简易适配多相机方案,并能完成原始高速图像数据输出或算法检测结果输出。上述嵌入式板卡单块功耗小于12 W。设计方案使用全工业级芯片实现,并通过看门狗功能防止死机现象产生,在同样可实时目标检测的条件下系统功耗和成本相较其他方案有成本低和稳定性好优势。

图6 嵌入式处理板卡结构框图Fig.6 Structure diagram of embedded board
基于1.3节算法设计思路,可将算法中属于数据预处理的部分:梯度空间转换及色差空间转换代码,使用FPGA实现,而将从二值化开始,包括游程编码、基于连通域大小的特征提取、速度测算以及外接矩等算法部分由DSP实现。
原始数据分通道在FPGA内完成由梯度算子卷积完成梯度转换,并通过查找表转换成Lab空间数据。上述两类转换数据加上原始相机数据总共为 180 MB/s数据传输至DSP。DM648系统共提供5路VPORT接口,本系统使用3路VPORT通道作为传输通道,其每路能提供最高为108 MHz的16 bit数据位宽。DSP与FPGA之间的配置信息不需要实时性传输,所以系统可选择接口简单的EMIF作为低速数据通路,FPGA在此接口下可作为DSP的外部存储器使用。
在算法移植实现中,应充分发挥线阵相机数据流以行为单位输出的特点。在梯度转换处理中,FPGA端进行了缓存一行数据的处理,在Lab空间转换中采用并行转换方式,最终将数据按照DSP端接收协议格式摆放,并通过VPORT接口输出数据至DSP进行算法处理。最终检测数据通过DSP板千兆接口和交换机汇总于设备状态显示用简易工控机,将检测数据上传云端服务器,供后续处理。
1.5 基于目标实时速度修正的剔除系统设计
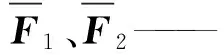
分拣设备的执行部分是机电结合部件,根据用途不同可有多种形式,文献[13]中的果物分选设备需控制电磁铁驱动的翻板,而本文设计的异纤清除机和常见的大米分拣机都使用电磁高压气阀作为吹出异物的执行机构,其中喷阀启动时机的选择是关键问题。在喷阀启动时机计算中,相机和喷阀间距由实际机械尺寸决定。风速、管道长以及各个步骤用时关系如图7所示。
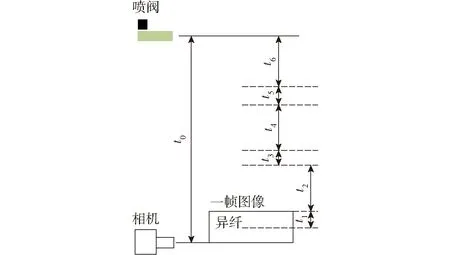
图7 喷阀启动时间计算示意图Fig.7 Diagram of valve delay time calculation
图7中总时长t0可用相机和喷阀间距除以检测目标速度得出;t1用来表示异纤在图像中的位置;t2为嵌入式板卡计算时间;t3表示信号从嵌入式板卡出发时刻与喷阀驱动信号发出的时间差;t4为喷阀启动延时,用以建立气压,与喷阀本身属性有关;t5用来增加小部分提前量以防拍摄的异纤只是部分暴露;喷阀启动修正量t6为从总时长t0中除去之前所有分步耗时(t1~t5)的剩余时间。喷阀开启时长可通过异纤实际长度和速度计算。
2 系统实验与分析
2.1 阈值选取算法实验与分析
设备设定开机后等待灯管预热5 min为学习状态,并将50行数据作为一帧图像,通过统计学习色差和梯度阈值,共学习55.2 k帧图像,实际使用阈值通过统计得出,并设定最低值保护算法以免当无棉花情况下计算获得过低阈值。学习时间结束后软件进入检测状态。
图8是现场3条产线正常运行时的归一化梯度曲线。3条曲线对应的产线走棉量相当,都约为400 kg/h。由图8可知,占图像中主体部分的梯度都小于10。可将梯度10作为学习最小保护值,并取固定百分比的梯度作为二值化阈值,如在图8中归一化频数取0.2时,产线2对应阈值为14,产线1和3对应为13。可见棉花和图像背景调节的不同会造成统计时有少量差异,但是基于阈值学习后的阈值相近。阈值选取百分比可以通过软件主界面灵敏度设置成比例调整,即可保证异纤基本不漏判。在更换棉花或光路照明稍有变化后,变化较多的是棉花与背景之间的绝对值变化,而背景、棉花、异纤之间统计关系不会有剧烈变化,异纤在棉花中所占比例仍是一个较小的值,设备通过学习新阈值即可初检出所有疑似目标。

图8 归一化梯度曲线Fig.8 Curves of normalized gradient
2.2 目标测速算法实验与分析
目标测速算法将分为滚筒实验台实验和产线实际运行实验两部分。滚筒实验台可定量验证测速算法的可行性,实验装置如图9所示。架设在架子上的相机使用50 mm焦距镜头垂直拍摄贴于滚筒上的测试靶纸;滚筒由变频器控制的交流电动机带动转动,其转速可以通过旋转编码器读出。滚筒周长多次测量取平均值为833.2 mm,测量相机物距为717 mm,依据光路计算得式(5)中光学放大率M为14.34。实验中典型校正效果如图10所示。
图9 滚筒实验平台Fig.9 Roller experiment platform1.相机 2.电动机 3.滚筒 4.测试靶纸 5.旋转编码器 6.变频器
图10中楼房窗户处的细节可以看出在正确校正后,图像中色散现象基本消除。实验结果如表 1所示,并通过相机测速均值Vcam与编码器测速均值Vrot之差除以编码器测速均值Vrot计算误差。

图10 三线分离图像与校正效果图Fig.10 Diagram of triple-line separation image and correction effect
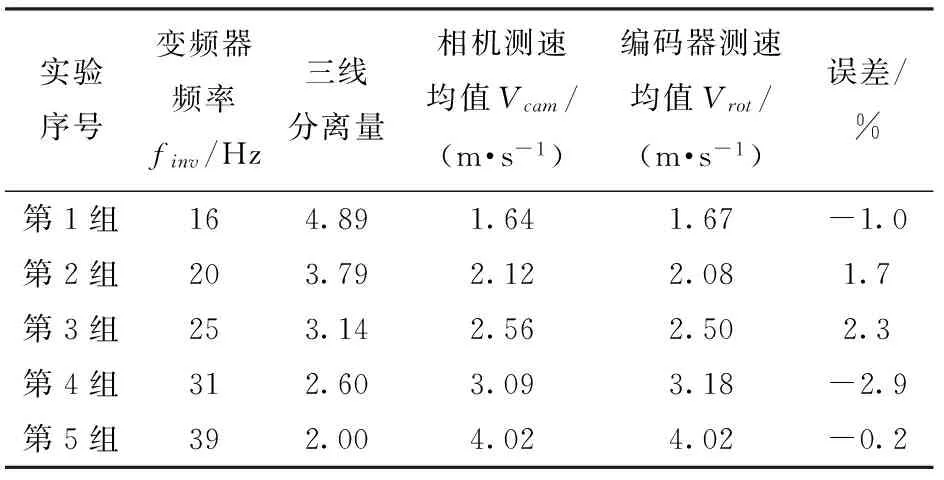
实验序号变频器频率finv/Hz三线分离量相机测速均值Vcam/(m·s-1)编码器测速均值Vrot/(m·s-1)误差/%第1组164.891.641.67-1.0第2组203.792.122.081.7第3组253.142.562.502.3第4组312.603.093.18-2.9第5组392.004.024.02-0.2
测试结果显示,三线测速方案基本能反映被拍摄物体真实的运行速度。将三线分离量测速方案在产线中使用,所得典型速度统计如图11所示,此处以512个测速结果为例。其中96%的测量速度分布在8~15 m/s,均速为10.8 m/s,与工程经验相符。
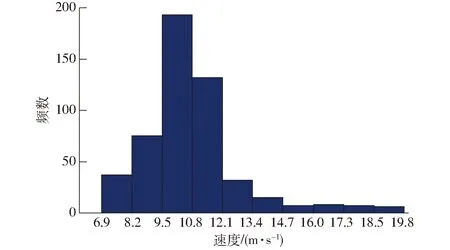
图11 异纤速度测试结果直方图Fig.11 Histogram of foreign fiber velocity measurement result
2.3 目标检测算法实验与讨论
图12为合作厂房产线一个班次内上传白光通道检出图像。其中图12a~12h为异纤,图12i~12l为棉花本身所带有的杂质。

图12 白光通道典型检出物Fig.12 Typically detected substances of white light channel
紫外光和偏振光检出效果如图13所示,棉花在紫外光偏振光通道呈现较低灰度,通过固定阈值设定即可满足检出需求,本文在此不再赘述。

图13 紫外光和偏振光检出物Fig.13 Detected substances of fluorescence and polarization channel
图14为高级用户界面的设置界面,界面包括喷阀打击时间、喷阀个数、丝状异纤最小检测长度、块状异纤最小检测面积以及紫外光灵敏度。

图14 高级用户界面Fig.14 Advanced user interface
软件主界面只保留给普通用户灵敏度设定,用于成比例增加阈值选取的百分比数值,如图15所示。设备开机后自动进入学习状态,在学习完毕后,进入检测状态,并定时自动重学习阈值。

图15 软件主界面Fig.15 Main user interface
2.4 嵌入式硬件实验与分析
嵌入式硬件实验应分为2个步骤:①系统运行实时性实验,通过使用模拟图片检测系统运行时间。②使用原始图像数据长期实验,用于检验板卡运行长期稳定性。
验证系统运行实时性,将选取的图像在PC仿真平台上使用VC仿真运行,并与使用测试设备中的图像模拟源将数据发送至检测板卡运行进行比对。运行时间分算法步骤如表2所示,其中PC平台配置为i5-4210@2.4 GHz,8 GB DDR3,算法以Release方式编译运行;嵌入式平台为FPGA EP3C55和DM648@900 MHz,256 MB DDR2,其中DSP以“-O3”优化设置编译运行。
检测板卡中FPGA完成梯度空间转换和色差空间转换等图像预处理工作。其中梯度转换需计算当前行与上一行和下一行数据的关系,需要缓存一行数据,而色差空间转换可在一行内完成,不需要缓存数据,所以FPGA总共耗时只有梯度空间转换所需的缓存一行数据的时间,即表2中108 μs。DSP运算时,算法通过连通域大小初步确定疑似目标,然后对疑似目标进行测速,得到准确的目标尺寸,最后进行长宽比面积等精确细节检测。DSP平台试验中,设计时将梯度和色差检测利用DSP平台提供的基于单指令多数据操作(Single instruction multiple data, SIMD)指令的相关内联函数(Intrinsic function)提升数据处理并行能力,并使用基于汇编优化的数学库对细节检测的计算步骤加速,得到了较好的优化效果,使DM648在主频低于PC平台的情况下得到了相当的运算时间。实验结果表明:嵌入式板卡处理一帧的图像数据耗时为3 127 μs,该值小于共50行数据的一帧图像所需的采集时间5 400 μs,板卡数据处理能力满足系统实时性需求。

表2 算法分步测试结果Tab.2 Test results of algorithm step by step μs
不同于基于上位机的系统开发,嵌入式方案在开发中需要将算法程序跨语言跨平台进行移植并深度优化,在工程实现中易造成嵌入式板卡算法程序运行结果和原算法结果不一致的问题。在系统测试中,应以相机专用测试设备录制现场数据后,通过相机数据模拟源将所录制的原始数据以相机接口格式输送至嵌入式板卡,并对检测数据进行长期验证,文献[20]中有具体测试设备实现方法的讨论。在使用模拟源进行的长期测试中,FPGA+DSP板卡始终稳定可靠,实验中检测效果与原算法保持一致,并且无运行超时记录。
2.5 剔除系统实验与分析
剔除系统实验时,需测试系统对不同速度目标的剔除效果。实验时使用变频风机连接异纤机主管道,并通过设定不同频率的方式,改变管道风速,通过测试系统对异物的击出率,测试系统对产线风速变化的适应能力。实验中使用80 mm×5 mm的彩色皱纹纸,喷阀时长设定为13 ms。实验时待风机工作稳定后,投放20朵粘上测试纸条的棉团进行测试,实验结果如表3所示。
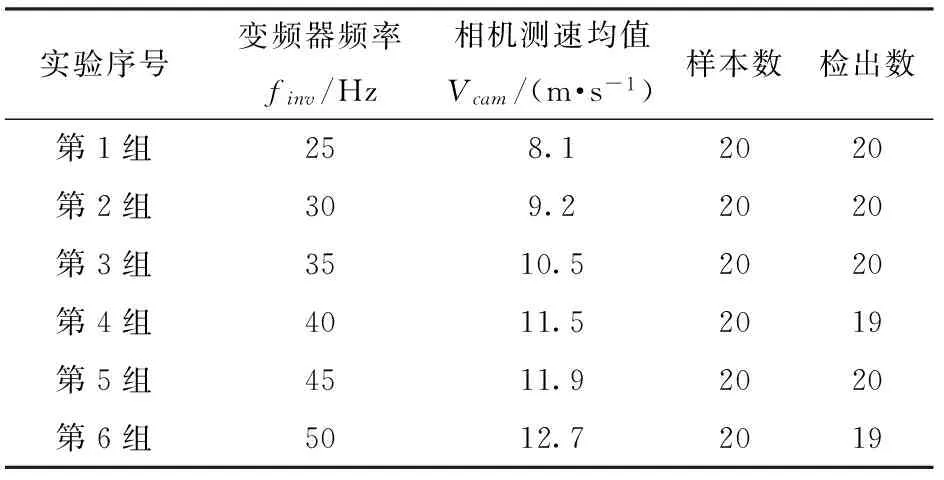
表3 变速剔除实验结果Tab.3 Test results of variable speed detection
上述实验结果显示,因为异纤附着在棉花上,速度和棉速一致,通过准确的目标测速,系统检出效果良好。
2.6 异纤检测实验与分析
安装于实际产线的设备如图16所示。在现场设计样本测试及现场扎袋比对测试2种方案对设备异纤检测能力进行测试。表4为设备运行状态时使用样本测试的典型检测报告。产线测试条件为:支别J40,产量348 kg/h,测试棉速均值为10.8 m/s。投放时需保证投放口接近相机检测区域,以避免测试样本被棉流覆盖。开阀时长设置为白光20 ms,紫外光、偏振光50 ms,在异纤清除机管道投放口投放40 mm×2 mm的模拟异纤样本,进行测试。

图16 实际产线安装照片Fig.16 Installation photo of machine in cotton mill1.除杂气路 2.异纤清除机 3.混棉机 4.精细开棉机

颜色样本数发现数检出数检出率/%绿色20181890淡黄色20161575白色20181785透明薄膜20181890
注:检出率为检出数目与样本数目的比值。
实验中淡黄色异纤检出率较低,与其和棉花色彩差异较小有关。检测时各组击出率相较之前变速击出实验有少量下降,与输棉管道风压和剔除系统除杂风机风压匹配有关。
异纤清除机在合作棉纺厂测试运行期间,由合作厂商独自通过扎袋比对方式对设备进行异纤检出测试,测试条件为:支别J50,产线产量390 kg/h,测试时间56 min。测试时,国外异纤清除机A和本文异纤清除机处于一线两机并行的工作状态,国外异纤清除机B安装于本文异纤清除机后方,用于检测本文异纤清除机漏过的异纤。测试完毕后对总喷出物称量(出花量)和异纤称量,然后将两者相除得到异纤出花比。测试结果表明:本文异纤清除机出花量为212.4 g,异纤质量为0.4 g,异纤出花比为0.189%;国外异纤清除机A的出花量为466.4 g,异纤质量为0.3 g,异纤出花比为0.064%;国外异纤清除机B的出花量为344.4 g,异纤质量为0.09 g,异纤出花比为0.026%。本文异纤清除机在检出异纤质量和异纤出花比2个参数上都有优势,原因是准确的异纤检测算法和喷阀控制。
异纤清除机在如图16所示的合作棉纺厂已运行超过2年,整体检测效果一直保持稳定,合作厂方认可本设计中异纤清除机的检测效果和对异纤种类的覆盖率。
3 结论
(1)针对透明薄膜在传统紫外光和白光检测中难以发现的问题,在紫外光路上通过增加偏振光源,在不增加相机的情况下,增强对透明薄膜的检出。
(2)针对异纤检测算法讨论对产线适应性问题研究较少的现状,提出基于归一化相关系数和二次曲面拟合的三线阵相机的亚像素空间分离量估算的测速方案,设计滚筒实验进行验证。最终将测速应用于剔除系统控制方案,并设计变速实验进行验证。
(3)基于FPGA+DSP嵌入式系统,设计一套计算量合适,利于嵌入式实现的,包括白光、紫外光及偏振光检测在内的算法。在嵌入式系统中实现算法,并优化运行速率至满足系统实时性需求。
(4)设计样本测试及现场扎袋比对测试2种方案来验证现场检测效果。样本测试显示设备在与棉花有明显差异的异纤及带有荧光粉的丙纶丝和透明薄膜的检出率高于80%,而接近棉花颜色的淡黄色异纤检出率稍低于80%。扎袋比对测试显示,基于准确的异纤检测算法和喷阀控制,本文设备相较同类设备有异纤落花率优势。
1 杨文柱,李道亮,魏新华,等. 基于光谱分析的棉花异性纤维最佳波段选择方法[J]. 农业工程学报, 2009, 25(10):186-192. YANG Wenzhu, LI Daoliang, WEI Xinhua, et al. Selection of optimal band for detection foreign fibers in lint cotton using spectroscopic analysis[J]. Transactions of the CSAE, 2009,25(10):186-192 (in Chinese)
2 王欣. 基于机器视觉的棉花伪异性纤维识别研究[D]. 北京:中国农业大学, 2015 WANG Xin. Detection of pseudo-foreign fibers based on computer vision[D]. Beijing: China Agricultural University, 2015.(in Chinese)
3 杨文柱,李道亮,魏新华,等. 棉花异性纤维图像分割方法[J].农业机械学报,2009,40(3):156-160. YANG Wenzhu, LI Daoliang, WEI Xinhua, et al. Toward image segmentation of foreign fibers in lint[J].Transactions of the Chinese Society for Agricultural Machinery,2009,40(3):156-160. (in Chinese)
4 杨文柱,李道亮,魏新华,等. 基于自动视觉检测的棉花异性纤维分类系统[J].农业机械学报,2009,40(12):177-181. YANG Wenzhu, LI Daoliang, WEI Xinhua, et al. AVI system for classification of foreign fibers in cotton[J]. Transactions of the Chinese Society for Agricultural Machinery,2009,40(12):177-181. (in Chinese)
5 赵学华,李道亮,杨文柱,等. 基于改进蚁群算法的棉花异性纤维目标特征选择方法[J].农业机械学报,2011,42(4):168-173. ZHAO Xuehua, LI Daoliang, YANG Wenzhu, et al. Feature selection for cotton foreign fiber objects based on improved ant colony algorithm[J].Transactions of the Chinese Society for Agricultural Machinery,2011,42(4):168-173. (in Chinese)
6 赵学华, 李道亮, 于合龙. 基于费舍尔评分与离散粒子群优化的棉花异性纤维在线检测[J].农业工程学报, 2014, 30(6):107-115. ZHAO Xuehua, LI Daoliang, YU Helong. Online detection for cotton foreign fiber based on fisher score and binary particle swarm optimization[J]. Transactions of the CSAE,2014,30(6):107-115. (in Chinese)
7 王欣,李道亮,杨文柱,等.基于可见光机器视觉的棉花伪异性纤维识别方法[J/OL].农业机械学报,2015,46(8):7-14. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150802&journal_id=jcsam.DOI: 10.6041/j.issn.1000-1298.2015.08.002. WANG Xin, LI Daoliang, YANG Wenzhu, et al. Lint cotton pseudo-foreign fiber detection based on visible spectrum computer vision[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(8):7-14.(in Chinese)
8 郑文秀,王金星,刘双喜,等.棉花异性纤维的动态识别技术研究[J].仪器仪表学报,2009,30(10):2203-2207. ZHENG Wenxiu, WANG Jingxing, LIU Shuangxi, et al. Reaserch on dynamic identification technology of cotton foreign fibers[J]. Chinese Journal of Scientific Instrument,2009,30(10):2203-2207. (in Chinese)
9 RAMESH B, BHARDWAJ A, JUSTIN R. Optimization and evaluation of image- and signal- processing kernels on the TI C6678 multi-core DSP[C]∥IEEE High Performance Extreme Computing Conference (HPEC),2014:1-6.
10 PAUWELS K, TOMASI M, JAVIER D, et al. A comparison of FPGA and GPU for real-time phase-based optical flow, stereo, and local image features[J]. IEEE Transactions on Computers,2012,61(7):999-1012.
11 LEE S H, YANG C S. A real time object recognition and counting system for smart industrial camera sensor[J]. IEEE Sensors Journal,2017,17(8):2516-2523.
12 BARBALACE A, LUCHETTA A, MANDUCHI G, et. al. Performance comparison of VxWorks, Linux, RTAI, and Xenomai in a hard real-time application[J]. IEEE Transactions on Nuclear Science,2008,55(1): 435-439.
13 陈铭明. 基于FPGA与DSP的棉花异纤检测系统研究[D]. 南京:南京理工大学, 2015. CHEN Mingming. Research on cotton foreign fiber detection system based on FPGA and DSP[D]. Nanjing: Nanjing University of Science & Technology,2015. (in Chinese)
14 邓继忠,李山,张建瓴,等.小型农产品分选机设计与试验[J/OL].农业机械学报,2015,46(9):245-250. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150936&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2015.09.036. DENG Jizhong, LI Shan, ZHANG Jianling, et al. Design and test of small-scale sorting machine for agricultural products[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2015,46(9):245-250. (in Chinese)
15 张晨, 孙世磊, 石文轩,等. 工业线阵CCD相机系统测试与噪声评估[J].光学精密工程,2016,24(10):2532-2539. ZHANG Chen, SUN Shilei, SHI Wenxuan, et al. Linear CCD camera system for industry measurement and its noise evaluation[J].Optics and Precision Engineering,2016,24(10):2532-2539. (in Chinese)
16 贾小秋. 超越M型异纤分拣机的应用[J]. 棉纺织技术,2016,44(8):48-51. JIA Xiaoqiu. Application of Chaoyue M foreign fiber cleaner [J]. Cotton Textile Technology,2016,44(8):48-51. (in Chinese)
17 陆文凯,张雷,刘磊.异性纤维分拣系统中用视频测速的棉流速度在线估计方法:中国,10065192.4[P]. 2008-10-08.
18 李晓帆. 线阵CCD信号处理系统及处理算法研究[D]. 南京:南京理工大学, 2015. LI Xiaofan. Research on linear CCD signal processing system and algorithms[D]. Nanjing: Nanjing University of Science & Technology, 2015. (in Chinese)
19 潘兵,谢惠民,戴福隆.数字图像相关中亚像素位移测量算法的研究[J].力学学报,2007,39(2):245-252. PAN Bing, XIE Huimin, DAI Fulong. An investigation of sub-pixel displacements registration algorithms in digital image correlation[J]. Chinese Journal of Theoretical Applied Mechanics,2007,39(2):245-252. (in Chinese)
20 夏巧桥,汪鼎文,张立国,等.高速多通道遥感相机快视系统的实现[J].光学精密工程,2013,21(1):158-166. XIA Qiaoqiao, WANG Dingwen, ZHANG Liguo, et al. Realization of fast-view system for high-speed multi-channel remote sensing camera [J]. Optics and Precision Engineering, 2013,21(1):158-166. (in Chinese)
Design and Test of Foreign Fiber Removal Machine Based on Embedded System
ZHANG Chen1SUN Shilei2SHI Wenxuan3ZENG Lin1DENG Dexiang1
(1.SchoolofElectronicInformation,WuhanUniversity,Wuhan430072,China2.InternationalSchoolofSoftware,WuhanUniversity,Wuhan430072,China3.SchoolofRemoteSensingandInformationEngineering,WuhanUniversity,Wuhan430072,China)
The embedded system based on FPGA+DSP was suitable for the agricultural sorting field, due to its flexible chip selection and high power efficiency. The embedded system was designed based on the principle of detection, software and hardware design and rejection system design. In principle of detection, a polarization channel was added to the UV channel to resolve the problem of transparent film detection without increasing camera. In software design, a speed measurement based on spatial correction and a learning algorithm for threshold detection was proposed to improve the adaptation of the equipment. An embedded solution was put forward which had advantages in both material cost and power consumption. After optimization, the DSP embedded board could stably process camera image data in real time. In rejection system, a control scheme was designed based on target real-time speed. The experiment result showed that the speed measurement scheme was verified via roller platform, and cotton speed can be obtained in the production line test. The embedded system could meet the real-time requirement, and the system was stable under varying foreign fiber numbers in long-term test. Concerning the test of rejection system, an impact test was performed by changing the wind speed. Finally, two typical foreign fiber detection tests of the system were implemented. The results showed that the detection rates of foreign fibers and polypropylene filaments as well as transparent films were higher than 80%, while the detection rate of yellowish foreign fibers was slightly lower than 80%. In the comparison test with similar equipment, the present equipment revealed superior detection rate. Long-term test result showed that the present equipment was easy to operate and had stable performance.
foreign fiber removal machine; foreign fiber of cotton; machine vision; embedded system; sub-pixel spatial separation correction
10.6041/j.issn.1000-1298.2017.08.004
2017-03-02
2017-06-05
国家自然科学基金青年科学基金项目 (61501334)
张晨(1983—),男,博士生,主要从事机器视觉和嵌入式系统研究,E-mail: chen.zhang@whu.edu.cn
孙世磊(1981—),男,副教授,主要从事机器视觉和嵌入式系统研究,E-mail: sunsl@whu.edu.cn
S24; TS112.7
A
1000-1298(2017)08-0043-10
猜你喜欢
少儿科学周刊·儿童版(2022年10期)2022-06-27
数学物理学报(2022年1期)2022-03-16
数学物理学报(2021年6期)2021-12-21
数学物理学报(2021年5期)2021-11-19
家庭影院技术(2021年7期)2021-08-14
小读者(2020年4期)2020-06-16
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
电子制作(2019年7期)2019-04-25
铁道通信信号(2018年2期)2018-04-18
红领巾·萌芽(2015年6期)2015-08-14
