基于工况影响的插电式混合动力汽车控制策略优化
2017-08-31 13:18高建平张磊敏孙中博郗建国
中国机械工程 2017年15期
高建平 张磊敏 孙中博 郗建国
1.河南科技大学车辆与交通工程学院,洛阳,4710032.郑州意昂电控科技有限公司,郑州,450000
基于工况影响的插电式混合动力汽车控制策略优化
高建平1张磊敏1孙中博2郗建国1
1.河南科技大学车辆与交通工程学院,洛阳,4710032.郑州意昂电控科技有限公司,郑州,450000
根据其城市公交车的运营线路、运行类型及线路覆盖区域,选取20条代表性公交线路上对应的20辆公交车,采集一个月的行驶数据,利用短行程分析法结合主成分分析及优化的K均值聚类算法实现各片段的合理分类,从而拟合出反映这一城市公交车运行特点的行驶工况。利用AVL-Cruise整车仿真平台验证该工况合成的有效性和必要性,同时引入Isight优化平台实现针对该城市公交车整车控制策略关键参数的优化标定。结果表明,控制参数优化后整车综合油耗降低8.7%,与RCP测试的仿真结果相对误差仅为2%,验证了优化后的控制策略的有效性。
主成分分析;组合优化算法;K均值聚类算法;行驶工况;Isight优化平台
0 引言
新能源汽车通常以一个典型工况来优化整车控制策略的关键参数,这会使整车在实际行驶过程中的综合性能无法得到最大发挥。行驶工况是汽车节能和排放测试评价的重要依据,对汽车产品车辆的燃料经济性、排放、舒适性和可靠性具有决定性影响[1]。构建某城市公交车的典型行驶工况对该城市公交车的整车参数匹配和控制策略优化标定具有实际的指导意义。FOTOUHI等[2]采用短行程分析法构建了德黑兰的乘用车行驶工况;NESAMANI等[3]选取6条代表性线路,构建出金奈公交车的行驶工况;杨小娟等[4]利用小波变换法处理数据并进行短行程划分,进而构建了北京市重型客车的综合工况;郝艳召等[5]基于武汉市公交车的实际运行数据,采用“短行程划分+速度/加速度+相关系数+相对误差”的方法建立了公交车的综合行驶工况。上述学者采用短行程、主成分分析和K均值聚类分析算法对行驶工况进行相关研究,但并未对特征参数进行优选,且K均值聚类算法的初始聚类中心多为随机选取,聚类中心容易陷入局部最优,进而影响工况合成的精度。王楠楠[6]利用粒子群算法对模糊C均值的初始聚类中心优化,但仍存在陷入局部最优的缺点;詹森等[7]用遗传算法对初始聚类中心进行优化,利用当前工况到各类中心的欧氏距离判别当前工况所属的类别,但该全局优化算法容易造成过早收敛,寻优效率不高;石琴等[8]利用SOFM神经网络算法和K均值聚类算法相结合的组合聚类算法来提高工况合成的精度,其中,SOFM神经网络能改进初始聚类中心,但输入节点通过权值与输出层节点相连,初始权值的设置会影响学习的结果,同样影响K均值聚类的效果。
基于上述研究,本文利用样本数据以短行程分析法划分片段后,提出基于主成分分析、模拟退火算法(simulated annealing, SA)和序列二次规划法(sequential quadratic programming schittkowski 改良版, NLPQL)组合优化算法来优化K均值聚类算法对片段进行分类,进而构建出代表该城市公交车的综合工况,并引入Isight优化平台标定该工况下的控制策略关键参数,实现该城市公交车日常运行需求功率的合理分配。
1 汽车行驶工况的试验设计
国内外各研究机构和政府部门在对汽车行驶工况进行相关研究时,尽管在数据采集方式、数据分析方法、工况解析及合成手段等方面形式多样,但技术流程大多采用图1所示的流程。

图1 汽车行驶工况开发技术流程
Fig.1 Development process of vehicle driving cycle
1.1 试验线路规划
针对公交车线路固定的特点,行驶工况的构建需预先选取有代表性的试验路线。根据对该城市公共交通总公司官网的调查,367条公交线路中有79条线路停运和未运营,288条线路正常运行。为使构建的工况能真实反映该城市的交通状况,根据公交车选取数量、公交线路强度、站点频次、公交车运行类型、公交车站点个数概率分布、公交车运行区域分布,最终选取表1中的各条线路。从表1知,选取的试验线路兼顾公交线路强度及覆盖区域,市区主干道、次干道、支路、环线及其外部区域均有所覆盖且线路重复率低。

表1 选定的20条公交试验线路
1.2 试验数据采集
车辆数据采集一般有两种方法[9],本试验选取20条公交线路上分别与之对应的20辆公交车,采用自主行驶法,安装好车载终端设备后,驾驶员按照各自正常状况驾驶车辆。行驶数据由车载终端设备实时采集,采样频率为1 Hz,在正常工作状态下车载终端与整车的ECU进行通信,采集CAN总线的信息,获取车辆当前状态下的相关参数,同时通过外置的GPS天线接收时间、位置等信息,采用卫星授时方式同步时钟,同时连接GPRS网络,将采集到的信息发送到远程服务器数据库,实现对车辆数据的实时采集,车载终端硬件结构如图2所示。

图2 车载终端硬件结构Fig.2 Vehicle terminal hardware structure
1.3 数据分析
车辆从起步出发至目的地停车,受交通状况的影响,期间会出现多次停车再起步。将车辆从一个怠速开始到下一个怠速开始的运动定义为运动学片段(简称片段),见图3。在每个运动学片段中,设加速度为a,车速为v,定义以下4类工况:①怠速工况。发动机工作且v=0;②加速工况。a≥0.15 m/s2且v≠0;③减速工况。a≤-0.15 m/s2且v≠0;④匀速工况。|a|≤0.15 m/s2且v≠0。对采集到的数据进行预处理后,利用MATLAB编写程序,将数据划分片段并提取出各个运动学片段的15个特征参数,构成相应的特征参数样本库。提取的15个特征参数见表2。
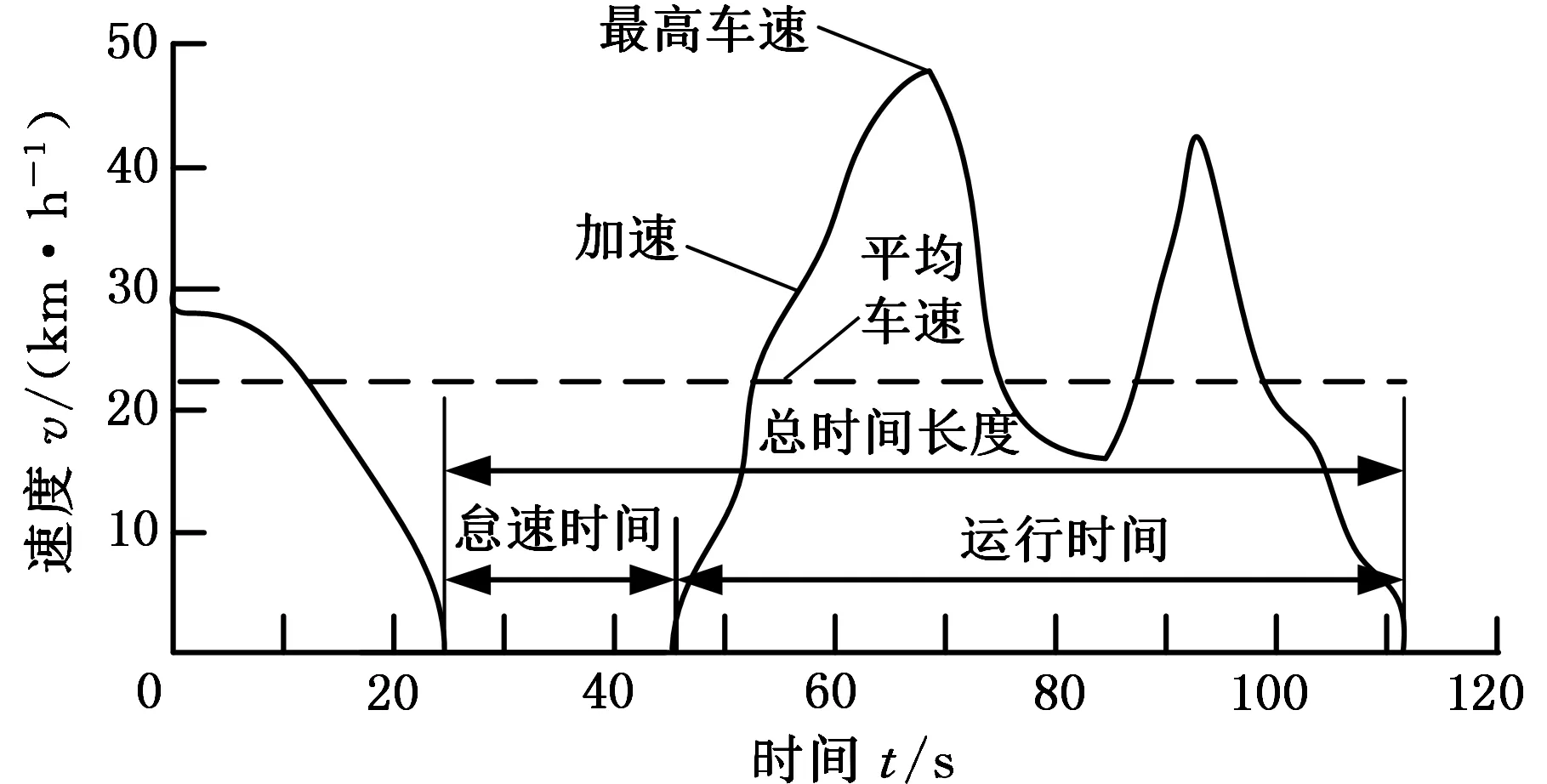
图3 运动学片段示意图Fig.3 Sketch map of kinematic segments

编号特征参数编号特征参数1运行时间比9匀速时间比2怠速时间比10最大加速度3平均速度11最大减速度4平均运行速度12速度标准差5运行距离13加速度标准差6最大速度14加速段平均加速度7加速时间比15减速段平均加速度8减速时间比
2 行驶工况的构建
2.1 主成分分析
各片段提取的15个特征参数之间存在一定的相关性,会造成信息之间的重叠,利用主成分分析可以用较少的变量表达较多的信息且各主成分之间均不相关。利用SPSS软件对所有运动学片段的15个特征参数进行主成分分析,15个主成分Am(m=1,2,…,15)的特征值、贡献率及累积贡献率见表3。
累计贡献率表征综合所有原始变量的能力,通常取累计贡献率80%左右的主成分代表所有原始变量进行分析。特征值可以看成主成分影响力度大小的指标,如果特征值小于1,说明该主成分的解释力度还不如直接引入一个原变量的平均解释力度大。因此,一般可以用特征值大于1作为选取标准,保留第一、第二和第三主成分,且前3个主成分与各特征参数之间的相关系数见表4。

表3 各主成分的特征值、贡献率及累积贡献率

表4 各主成分与特征参数的相关系数
2.2 组合优化算法优化的K均值聚类分析
利用K均值聚类算法对各片段进行分类,初始聚类中心的随机选取无法避免聚类陷入局部最优这一缺点,因此,本文选取SA和NLPQL构成组合优化算法优化初始聚类中心,优化前期充分发挥SA的全局优化能力,优化后期借助NLPQL快速定位全局最优区域,进行局部快速寻优,最终得到全局最优解[10]。
2.2.1 算法基础
SA来源于固体退火原理,用固体退火模拟组合优化问题,将内能E模拟为目标函数值f,温度T演化成控制参数t,即得到解组合优化问题的模拟退火算法:由初始解i和控制参数初值t开始,对当前解重复“产生新解→计算目标函数差→接受或舍弃”的迭代,并逐步衰减t值,算法终止时的当前解即所得近似最优解,这是基于蒙特卡罗迭代求解法的一种启发式随机搜索过程。
NLPQL用来解决带有约束的非线性数学规划问题,基本思想是将目标函数以二阶拉氏方程展开,并把约束条件线性化,使其转化为一个二次规划问题。二阶方程通过quasi-Newton公式得到了改进,而且加入了直线搜索,提高了算法的稳定性,该算法最主要的优点是容易和一个非常健壮的算法一起使用。SA作为优秀的全局优化算法,在寻优过程中,除了可以接受优化解外,还基于随机接收准则,有限度地接受恶化解,并使接受恶化解的概率慢慢趋近于零,这使得SA可以从局部最优解中跳出,尽可能地得到全局最优解。但重复循环的退火计算使得SA的优化过程较慢,计算效率非常低。NLPQL作为局部优化的数值型优化算法,能够解决有约束的非线性优化问题并很快地收敛到最优解。因此,充分发挥这两种优化算法各自的优点,可提高寻优效率。
2.2.2 算法设计
利用Isight优化软件结合SA、NLPQL两种算法构成组合优化算法,联合MATLAB应用于聚类中心的优化,寻优原理见图4,具体优化步骤如下。

图4 组合优化算法寻优原理Fig.4 Principle of combination optimization algorithm
(1)设计参数,给定初始温度t=t0,根据选定的初始参数值,计算产生一个目标函数值,根据此值,再次随机产生初始状态的参数值,令k=0。
(2)重复以下部分操作:
① 产生新状态sj=Gente(s);
②if min(1,exp[-C(S′)-C(S)/tk])≥random[0,1],s=sj;
③直到Metropolis抽样稳定准则满足。
(3)退火温度tk+1=update(tk),并令k←k+1;在退火寻优过程中伴随温度的下降,寻找到局部最优解后,概率性地跳出,并寻找最优解。
(4)直到满足算法终止准则。
(5)输出全局搜索的最优结果。
以综合评价指标F为优化目标,兼顾同类相似性和异类差异性的评价指标,利用组合优化算法优化初始聚类C中心,优化的数学模型如下:
(1)

优化变量、约束条件等见表5,其中,c(j)表示第j类的初始聚类中心。具体优化界面及流程如图5所示。同时从图6中发现迭代到423代时得到目标函数最大值,而图6中的离散趋势为聚类结果局部最优所造成。图7为优化初始聚类中心后各片段的聚类结果。

表5 优化条件及内容
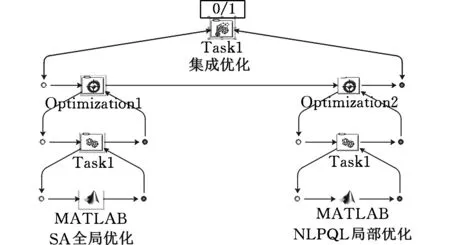
图5 具体优化界面及流程Fig.5 Optimize interface and process

图6 初始聚类中心迭代寻优Fig.6 Initial clustering center iterative optimization

图7 优化初始聚类中心后各片段的聚类结果Fig.7 After optimizing the initial cluster center, the clustering results of each fragment are obtained
3 工况的合成与验证
3.1 工况的合成
据国外工况合成经验,行驶工况时间长度一般为1200~1500 s,利用同一类中的欧氏距离大小来选择备选片段,由各类在整体数据中所占的时间比例来确定各类片段在最终工况合成中所占的时间。第i类在工况合成中所占的时间
(2)

构建出基于该城市公交车时间为1274 s、长度为5.28 km的行驶工况,如图8所示。

图8 某城市公交车的行驶工况Fig.8 Driving cycle of a city bus
3.2 工况的验证
速度-时间曲线不够平滑使得一些曲线不能很好地被跟踪复现,必须对原始数据进行光滑处理,从而使瞬态工况的加速度变化更接近于实际情况。平滑处理前后的行驶工况如图9所示。

图9 平滑处理前后工况对比Fig.9 Comparison of driving cycle before and after smoothing
利用AVL-Cruise整车仿真平台搭建一辆以单轴混联为驱动系统的12 m插电式混合动力公交车,与MATLAB/Simulink基于中国典型城市公交工况优化的规则控制策略进行联合仿真试验,该PHEB的整车结构模型和主要参数分别如图10和表6所示。

图10 单轴混联系统结构Fig.10 Structure of single axis hybrid system

整车整备质量(kg)12500满载质量(kg)18000长,宽,高(mm)11900,2550,3150车轮静态半径(mm)452迎风面积(m2)6.6空气阻力系数0.55滚动阻力系数0.018发动机功率(kW)147ISG功率(kW)80主电机功率(kW)144主减速器速比6.17
为充分利用电网的电能,将整车的基本运行模式分为PED+HDCD(电量消耗阶段)和HDCS(电量维持阶段)[11],车辆工作过程中的转矩分配方式见表7。

表7 整车转矩分配方式
注:Sbat、SHDCD_in、SHDCS、Ssup均为电池荷电状态。
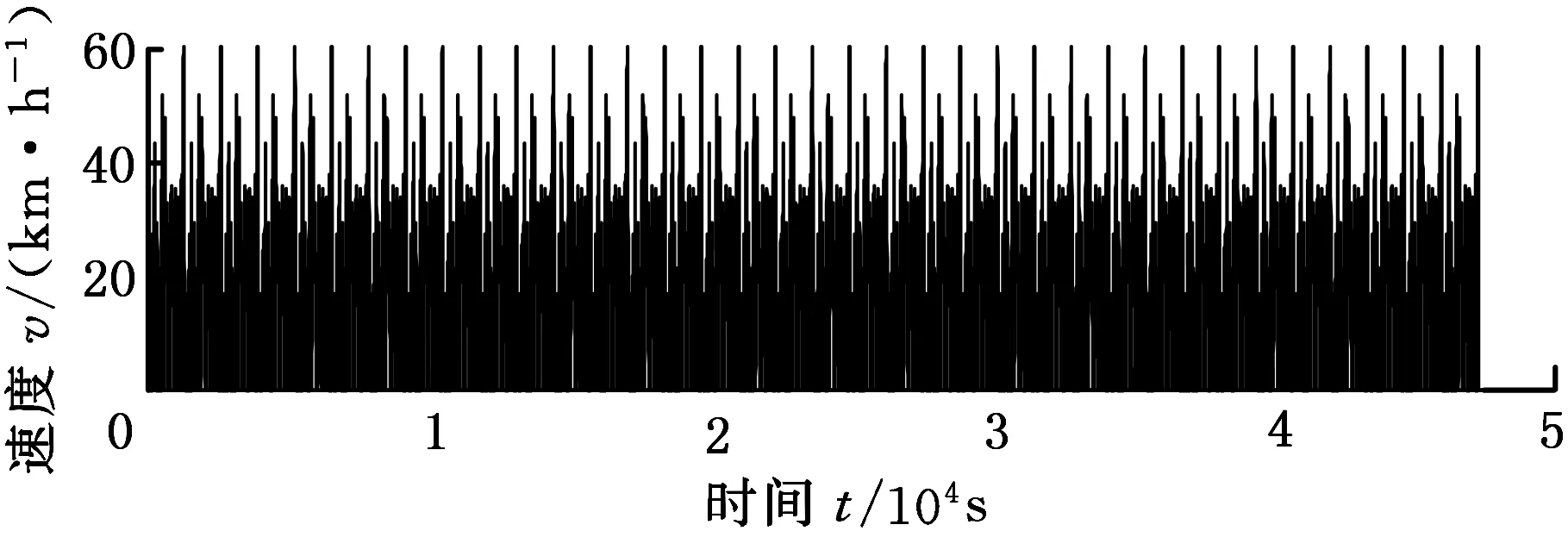
将行驶里程均为200 km的中国典型城市公交工况、基于主成分分析和组合优化算法优化的K均值聚类合成的某城市公交工况及某城市随机选取的一条未参与工况合成的公交线路(图11)行驶数据分别加载到整车模型中,整车控制策略利用Interface接口调用Cruise进行联合仿真试验。车辆在三种工况下的整车功率分配如图12所示,仿真结果见表8。
(a)中国典型城市公交工况

(b) 拟合的公交工况

(c)测试用实际工况图11 整车模型加载用行驶工况Fig.11 Driving cycle of vehicle model loading

(a)中国典型城市公交工况功率分配

(b)拟合的公交工况功率分配
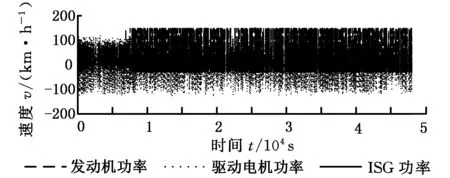
(c)测试用实际工况功率分配图12 3种不同工况下的整车功率分配Fig.12 Vehicle power allocation under 3 different driving cycle
4 整车控制策略的优化和验证
4.1 基于Isight平台的整车控制策略优化
利用Isight优化平台,选用组合优化算法优化PHEB,在拟合的该城市公交工况下优化整车控制策略关键参数,优化的数学模型如下:

表8 整车不同工况下的仿真结果
(3)

优化变量、约束条件等内容见表9,其中,优化参数CD_clutch为CD阶段离合器的接合转速,CS_clutch为CS阶段离合器的接合转速,discharge为超级电容放电系数,e_high为发动机最优工作区域上限,e_low为发动机最优工作区域下限。集成到Isight优化平台的优化流程如图13所示。

表9 优化参数及条件

图13 Isight平台优化流程图Fig.13 Isight Platform optimization flow chart
控制参数优化前后见表10。寻优迭代过程见图14。整车基于拟合的工况优化前后的仿真结果见表11。

表10 基于拟合的工况优化前后控制参数变化

图14 综合油耗的寻优迭代过程Fig.14 Iterative process of optimization of comprehensive fuel consumption

百公里油耗(L)百公里电耗(kW·h)百公里综合油耗(L)差(%)优化前23.72-2.1823.00优化后20.650.9920.98RCP测试20.831.7221.40
4.2 基于RCP测试的半实物仿真验证
为验证控制策略的有效性,引入基于RCP的半实物仿真平台进行验证。该平台硬件系统主要由dSPACE实时仿真系统、CANoe及驾驶员模拟装置组成,软件系统主要包括MATLAB、AVL-Cruise及dSPACE自带的数据监控软件ControlDesk。通过dSPACE丰富的I/O接口连接控制对象,其中,Simulink模块及S函数编写的C代码通过RTI与RTW协作自动将快速控制原型转化为可执行的C代码,经过编译并下载到dSPACE实时处理器中。试验采用两路模数转换通道引入真实驾驶员的油门踏板和制动踏板信号,一路控制器局域网(CAN)通道实现整车控制策略关键参数与整车模型的通信。真实驾驶员跟随目标车速踩下油门和制动踏板,使该仿真试验更接近于实车,同时C代码的高效性及高速USB的物理接口保证了该仿真的实时性。半实物仿真平台硬件如图15所示。

图15 半实物仿真平台硬件Fig.15 Hardware in the loop simulation platform
利用Interface接口实现整车加载拟合的行驶工况与基于MATLAB搭建的优化后的整车控制策略联合仿真,并利用半实物仿真平台进行实时仿真,仿真结果见表11。
5 结论
(1)针对某城市的公交车选取20条有代表性的公交线路,采集相关数据并利用主成分分析和组合优化算法优化后的K均值聚类算法拟合出基于该城市公交车的行驶工况。
(2)利用AVL-Cruise整车仿真平台构建的整车模型分别加载不同的行驶工况并与相同的整车控制策略进行联合仿真,验证了该城市公交车行驶工况构建的有效性和必要性。针对该城市PHEB的整车控制策略优化后,由联合仿真结果知,百公里综合油耗降低了8.7%,控制参数优化后的联合仿真结果与RCP测试的仿真结果相对误差为2%,验证了优化后的整车控制策略的有效性。
[1] 郑天雷. 全球车辆循环工况调查与对比[R]. 天津:中国汽车技术研究中心,2011. ZHENG Tianlei. Research and Comparisons of Vehicle Driving Cycle in the World[R]. Tianjin: China Automotive Technology & Research Center,2011.
[2] FOTOUHI A, MONTAZERI-GH M. Tehran Driving Cycle Development Using the k-means Clustering Method[J]. Scientia Iranica,2013,20(2):286-293.
[3] NESAMANI K S, SUBRAMANIAN K P. Development of a Driving Cycle for Intra-city Buses in Chennai,India[J].Atmospheric Environment,2011,45(31):5469-5476.
[4] 杨小娟, 王建. 北京市重型客车行驶工况的构建与研究[J]. 环境工程技术学报,2015,5(6):455-463. YANG Xiaojuan, WANG Jian. Construction and Research of Heavy-coach’s Driving Cycle in Beijing City[J]. Journal of Environmental Engineering Technology,2015,5(6):455-463.
[5] 郝艳召, 张洁, 王生昌,等. 武汉市公交车典型行驶工况的构建[J].交通信息与安全,2014,32(6):139-144. HAO Yanzhao, ZHANG Jie, WANG Shengchang, et al. Construction of Typical Driving Cycle for Public Buses in Wuhan City[J].Journal of Transport Information and Safety,2014,32(6):139-144.
[6] 王楠楠. 城市道路行驶工况构建及油耗研究[D]. 合肥:合肥工业大学,2012. WANG Nannan. Construction of the Urban Road Driving Cycle and Research of the Fuel Consumption[D]. Hefei: Hefei University of Technology,2012.
[7] 詹森,秦大同,曾育平. 基于遗传优化K均值聚类算法工况识别的混合动力汽车能量管理策略[J]. 中国公路学报,2016,29(4):130-137. ZHAN Sen,QIN Datong, ZENG Yuping. Energy Manangement Strategy of HEV Based on Driving Cycle Recognition Using Genetic Optimized K-means Clustering Algorithm[J]. China Journal of Highway and Transport,2016,29(4):130-137.
[8] 石琴,仇多洋,周洁瑜. 基于组合聚类法的行驶工况构建与精度分析[J]. 汽车工程,2012,34(2):164-169. SHI Qin, QIU Duoyang, ZHOU Jieyu. Driving Cycle Constrution and Accuracy Analysis Based on Combined Clustering Technique[J]. Automotive Engineering,2012,34(2):164-169.
[9] 陈全世, 朱家琏, 田光宇. 先进电动汽车技术[M].2版.北京: 化学工业出版社,2014:21-27. CHEN Quanshi, ZHU Jialian, TIAN Guangyu. Advanced Electric Vehicle Technology [M]. 2th ed.Beijing:Chemical Industry Press,2014:21-27.
[10] 赖宇阳. Isight参数优化理论与实例详解[M]. 北京:北京航空航天大学出版社, 2012. LAI Yuyang. Isight Parameter Optimization Theory and Examples[M]. Beijing: Beijing University of Aeronautics and Astronautics Press, 2012.
[11] WANG Ximing, HE Hongwen, Sun Fengchun. Comparative Study on Different Energy Management Strategies for Plug-in Hybrid Electric Vehicles[J].Energies,2013,6(11):5656-5675.
(编辑 陈 勇)
Control Strategy Optimization of Plug-in Hybrid Electric Vehicle Based on Driving Cycles
GAO Jianping1ZHANG Leimin1SUN Zhongbo2XI Jianguo1
1.Vehicle & Transportation Engineering Institute, Henan University of Science and Technology,Luoyang, Henan,471003 2.EonControls Co., Ltd., Zhengzhou,450000
According to the operation types and operation line, the city bus coverage area, 20 representative bus lines on the 20 bus driving data acquisition for a month were selected, a reasonable classification analysis method combined with theKmean clustering algorithm of principal component analysis and optimization of the implementation of each segment of the short stroke, thus the driving cycle that reflects the running characteristics of the city bus was fitted. The effectiveness and necessity of the Isight simulation platform was verified by the AVL-Cruise simulation platform, and the optimization of the key parameters of the vehicle control strategy for the city bus was introduced. The results show that the overall fuel consumptions of the vehicles are reduced by 8.7% and the relative errors of the simulation results with the RCP tests are only 2%, which verifies the effectiveness of the optimized control strategy.
principal component analysis; combinatorial optimization algorithm;Kmean clustering algorithm; driving cycle; Isight optimization platform
2016-11-14
国家自然科学基金资助项目(U1604147);河南省科技攻关计划资助项目(152102210073);河南省高等学校青年骨干教师资助计划资助项目(2015GGJS-046)
U469.7
10.3969/j.issn.1004-132X.2017.15.002
高建平,男,1976年生。河南科技大学车辆与交通工程学院副教授。主要研究方向为新能源汽车系统匹配与控制策略。发表论文20余篇。E-mail:gjpcar@gmail.com。张磊敏,男,1990年生。河南科技大学车辆与交通工程学院硕士研究生。孙中博,男,1989年生。郑州意昂电控科技有限公司工程师。郗建国,男,1978年生。河南科技大学车辆与交通工程学院讲师。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
能源工程(2022年2期)2022-05-23
现代电力(2022年2期)2022-05-23
民间故事选刊(2021年11期)2021-11-12
学苑创造·A版(2019年5期)2019-06-17
消费导刊(2018年10期)2018-08-20
消费导刊(2018年10期)2018-08-20
山东工业技术(2016年15期)2016-12-01
小学生·多元智能大王(2014年8期)2014-08-28
客车技术与研究(2014年1期)2014-03-20