多适应性轮履复合载物移动系统的设计
2017-08-31 13:18:47王淑坤曹晓捷张连青朱人杰
中国机械工程 2017年15期
王淑坤 曹晓捷 张连青 朱人杰 张 博
长春理工大学机电工程学院,长春,130022
多适应性轮履复合载物移动系统的设计
王淑坤 曹晓捷 张连青 朱人杰 张 博
长春理工大学机电工程学院,长春,130022
针对复杂的非结构化工作环境,为提高载物移动能力,提出了一种具有多适应性的新型轮履复合式移动系统。该移动系统由变径步行轮和履带系统组成,既发挥了轮式结构平地行走的转弯灵活性和运动高效的特点,又结合了履带式结构爬坡时良好的稳定性和适应性。同时,为进一步提高爬坡时货物的安全性,设计了自适应载物升降平台,通过陀螺仪运用卡尔曼算法进行平台倾角的闭环控制,实现了平台的水平载物。运用RECURDYN软件进行动力学仿真,并制作了实物模型实施了验证,结果表明:该移动系统具有较好的复杂工作环境的适应性和载物的平稳性。
轮履复合机构;变径步行轮;自适应升降平台;载物
0 引言
目前国内外研究的移动机器人的移动机构主要有轮式、履带式和腿式移动机构,其中以轮式移动机构的效率最高。轮式移动机构运动速度快、结构简单、控制方便,但越野性能不强。随着各种各样的车轮底盘的出现,如日本NASDA的六轮柔性底盘月球漫游车LRTV[1],俄罗斯TRANS-MASH的六轮三体柔性框架移动机器人Marsokohod[2],美国CMU的六轮三体柔性机器人Robby系列[3]以及美国JPL的六轮摇臂悬吊式行星漫游车Rocky系列[4],轮式机器人的越野能力得到显著提高。另外,履带式机构稳定性好、越障能力强且使用寿命长,适合在崎岖的地面上行驶。近年来,国内学者们充分结合了轮式、履带式及腿式运动机构的优点,研发出能够适应多种复杂路面条件的移动机构,如中国科学院沈阳自动化研究所的NEZA-I机器人[5]等复合式运动机构。
目前,针对智能型机器人的机构和运动研究较多,但缺乏针对实际应用的小型移动系统的探索。笔者以物流行业所需的小型移动系统为背景,设计了一款新型轮履复合式移动系统。该移动系统采用轮履切换式结构,有效地发挥了履带式和轮式行走机构的优点,并通过自适应控制,使其具有多种复杂路面的适应性和较好的载物平稳性。
1 移动系统总体设计
1.1 结构组成
如图1所示,轮履复合载物移动系统由自适应可倾斜升降平台模块、脚踏板转向模块及轮履复合模块组成。可倾斜升降平台模块设计成可升降、抽拉式结构。升降台由两套分别驱动的丝杠、剪叉机构支撑,可通过控制两个剪叉机构的伸缩长度实现平台的任意高度调节和倾斜角度;同时,在平台底部安装陀螺仪,用以实现平台的自适应平衡,保持复杂路面下的平台水平姿态,从而提高运输货物的安全性。作为机器人的行走部分,每个轮履复合模块由变径轮单元和履带底盘单元构成,其中每个轮履复合模块分别由一个直流电机独立驱动,变径轮和履带通过花键拨叉控制转换,能实现轮式和履式两种不同的运动模式,以适应平地和爬坡的不同路面需求。为保证该移动系统能进入建筑物内并可实现越台阶、爬楼梯等要求,需要对一般楼梯的结构尺寸、履带长度、履带轮直径、变径轮撑开直径和收缩直径、车体长度以及整个机身的总体尺寸等进行综合考虑,以保证其功能的顺利实现。
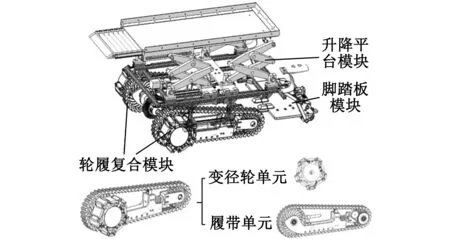
图1 轮履复合移动系统整体结构示意图Fig.1 Overall structural schematic diagram of wheel-track composite locomotion system
1.2 运动模式
轮履复合移动系统具有轮式和履带式两种运动模式。图2a所示为轮式平地运动状态,即变径步行轮伸展接触地面,同时放下脚踏板,万向轮着地,履带悬空,减少与地面的摩擦,实现灵活快速行走。图2b所示为履带爬楼运动模式,即变径步行轮收缩,同时收起脚踏板,万向轮脱离地面,履带着地,增大摩擦力,实现平稳爬楼。脚踏板转向模块由齿轮齿条、连杆机构组成,通过双滑块机构控制万向轮转向,如图2c所示。
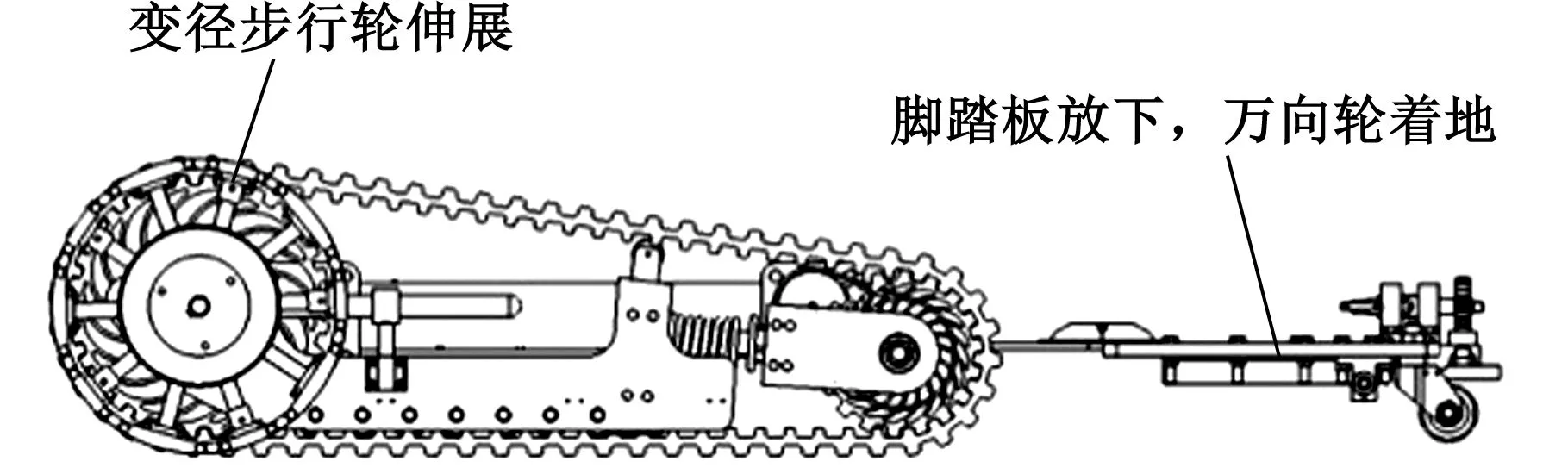
(a)轮式平地运动状态
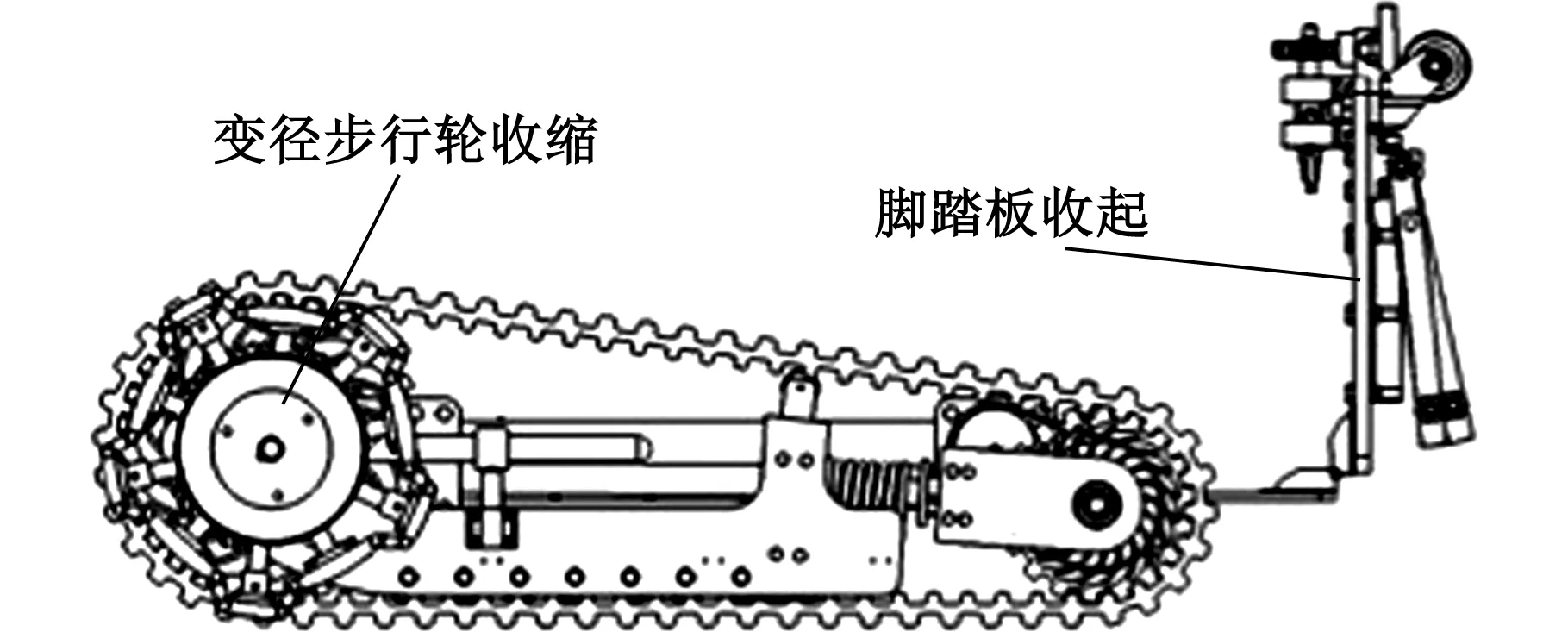
(b)履带爬楼运动状态
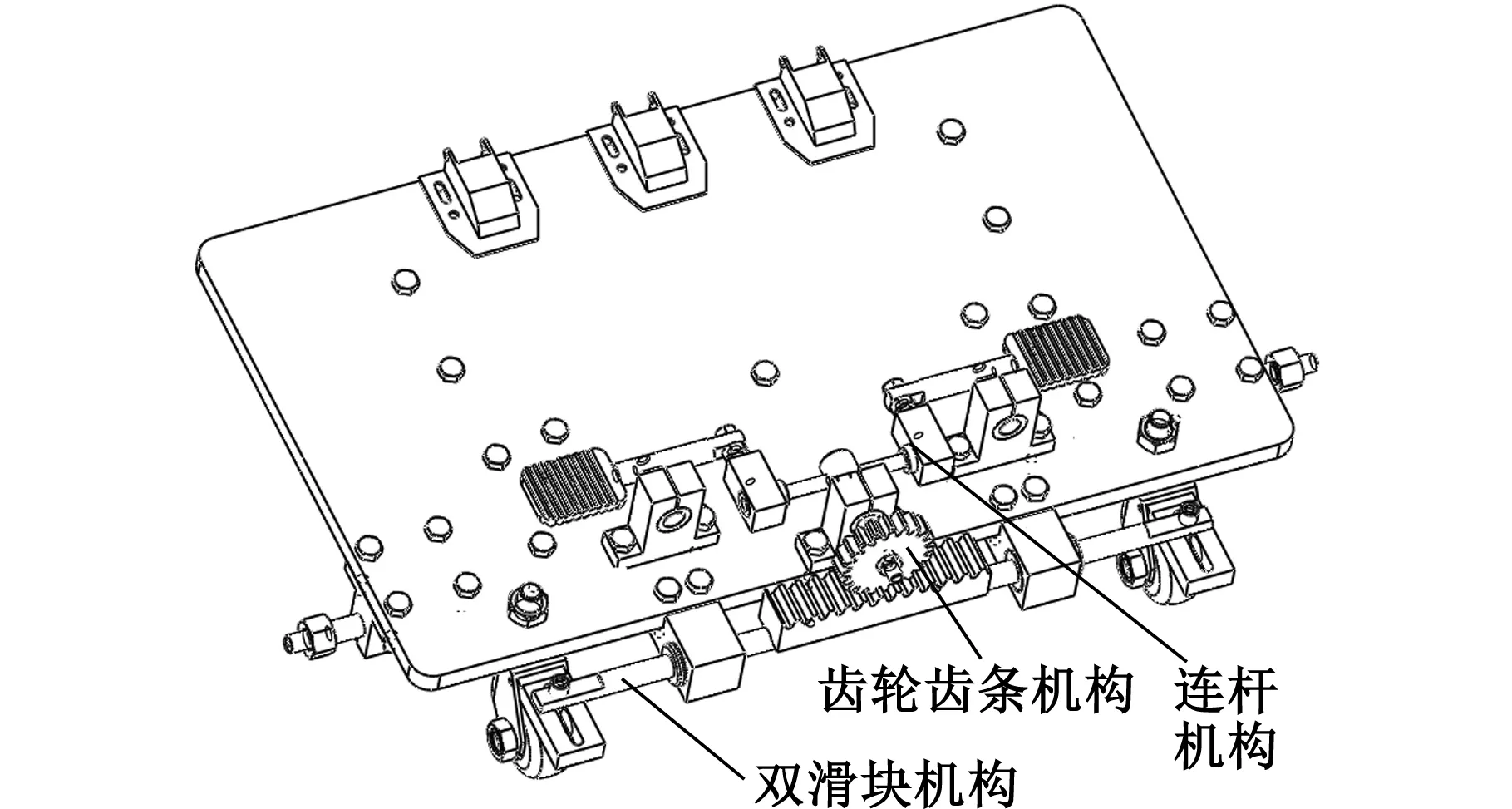
(c)脚踏板转向控制模块图2 轮履复合移动系统的两种运动模式Fig.2 Two movements’ patterns of wheel-track composite locomotion system
2 轮履复合结构设计
2.1 变径步行轮结构设计
图3a为变径步行轮的机构运动简图,该机构主要由5组并联的曲柄滑块机构组成,变径盘的转动带动5个曲柄同步转动,驱动小径轮片向外伸展或向内收缩,从而改变轮子的工作半径。图3b为变径步行轮展开后的模型图。
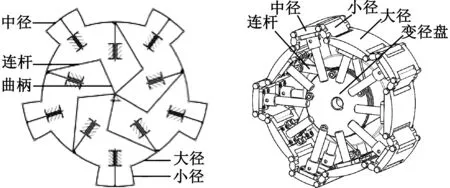
(a)原理图 (b)模型图图3 变径步行轮机构运动简图及模型图Fig.3 Kinematic and structural diagram of diameter-alternative wheels
2.2 履带结构设计
如图4所示,履带由前轮、后轮、履带、承重轮、拖链轮、承重护板和张紧装置构成。采用支重轮均布的方式保证履带在工作时不会出现跳齿行为,张紧装置保证整个履带工作在最佳状态。
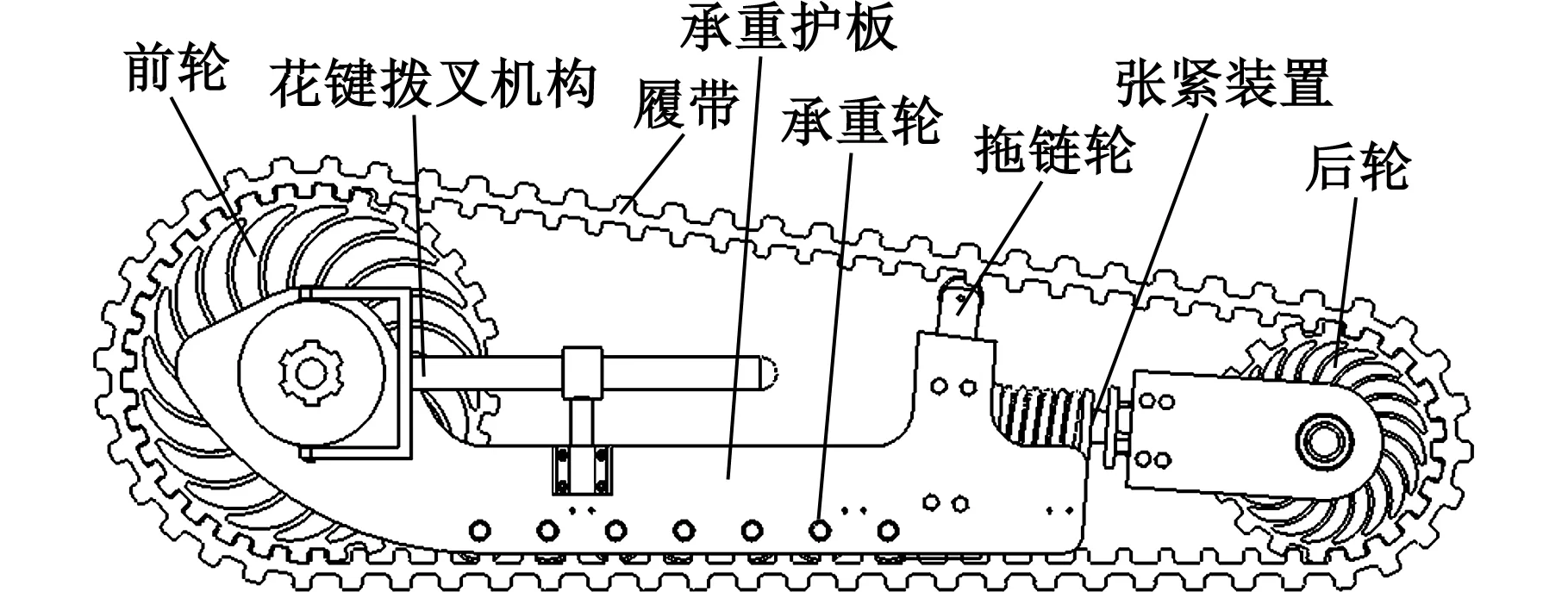
图4 履带结构示意图Fig.4 Structural diagram of track
2.3 拨叉结构设计
为了实现平地快速行走功能和爬楼功能的快速切换,设计了一种可实现轮履自由切换的花键拨叉结构,如图5所示。外花键与变径轮左固定盘脱开,内花键通过拨叉左移与右固定盘相连,使固定盘固定,前轮轴驱动转动盘实现步行轮变径;外花键与左固定盘相连,内花键通过拨叉右移与脱开,使固定盘与前轮轴锁定;前轮轴驱动步行轮定轴转动,实现平地行走。
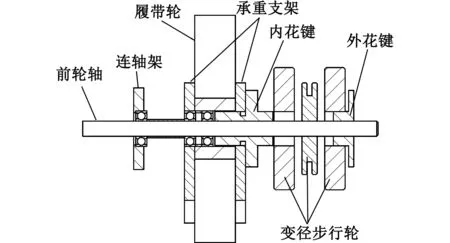
图5 拨叉结构示意图Fig.5 Structural diagram of fork
3 主要结构参数设计及分析
3.1 履带运动过程分析
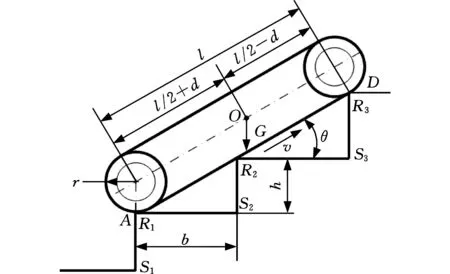
在分析爬楼姿态前,假设履带轮廓为长圆形,即中段为长度为l的直线履带,两端为半径为r的半圆履带,履带的质量分布均匀,重心在几何对称中心,单级楼梯高度为h,宽度为b,如图6a所示。
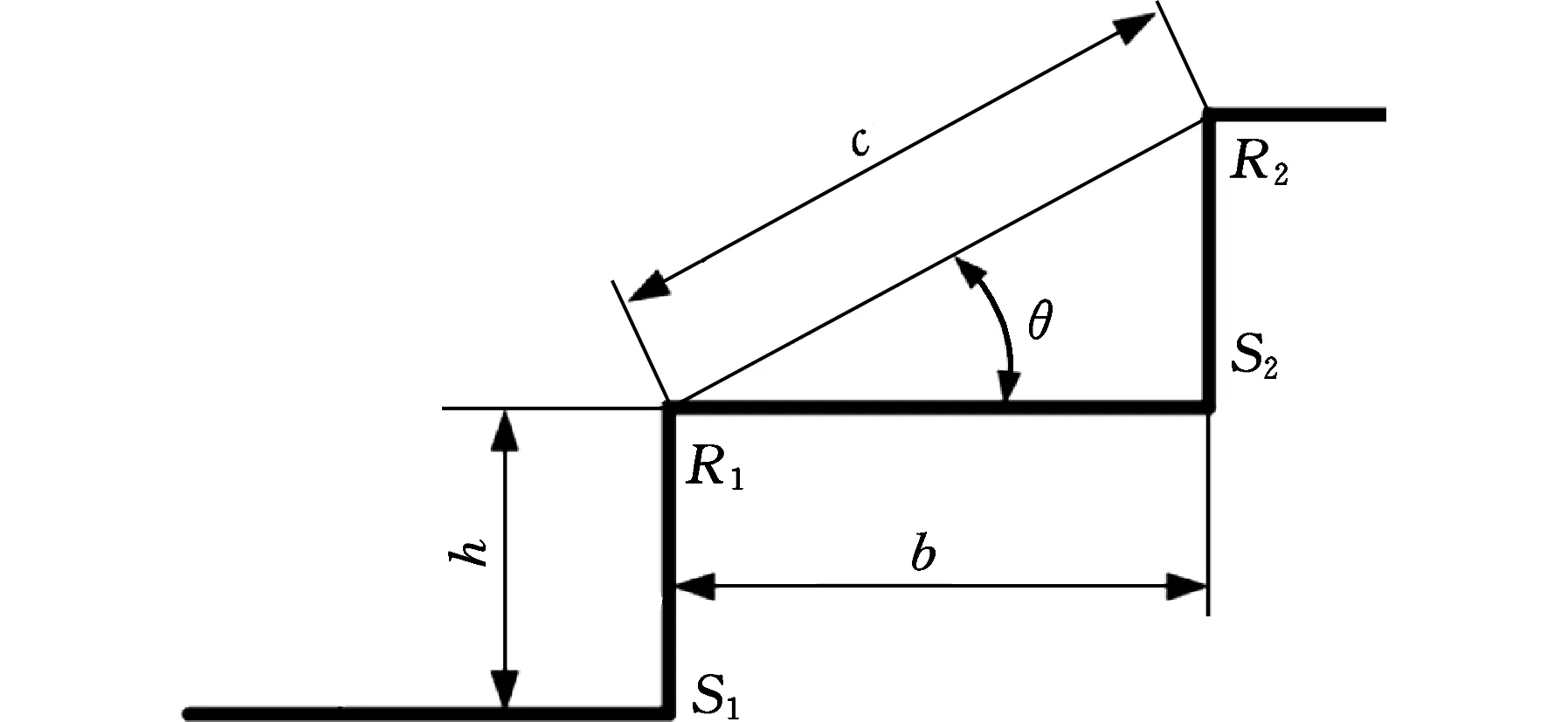
(a)楼梯参数
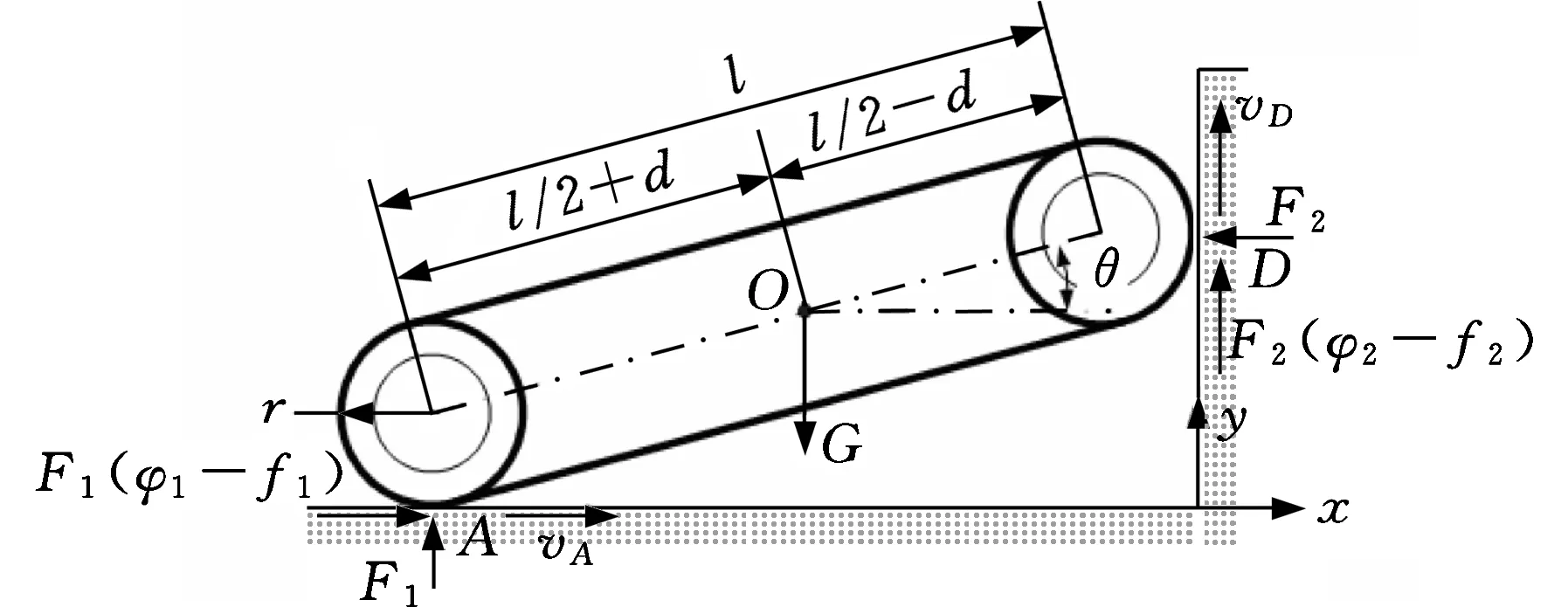
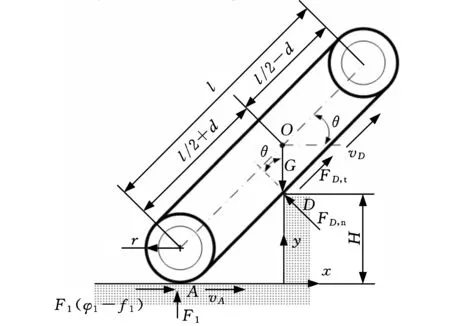
(b)履带参数图6 履带爬楼受力示意图Fig.6 Force diagram of track climbing
3.1.1 爬楼第一阶段
爬楼姿态由水平态变为爬坡态[6],履带前端与楼梯接触后,在地面摩擦推力和前端摩擦举力的作用下,重心不断升高,履带的中心轴线与地面夹角不断变大,重心缓慢前移。
根据图6b中坐标系,当履带爬坡时,D点在y轴方向上的偏移量关于θ角随时间变化量的关系式为
式中,l为前后轮中心距。
则履带系统绕质心旋转角、角速度和角加速度分别为
履带系统质心位移和加速度方程分别为
xG=-r-(l/2-d)cosθ
yG=r+(l/2+d)sinθ
式中,d为前后轮中心距算术平均值与质心位置的差值;r为后轮半径。
考虑到沿x轴和y轴力平衡方程,得
(1)
(2)
式中,F1为楼梯地面对履带支持力;F2为楼梯侧面对履带的支持力;m为履带质量;G为履带重力。
记
A0=φ[r+(l/2+d)sinθ]-(l/2+d)cosθ
A1=r+(l/2+d)sinθ
A2=-(l/2+d)cosθ
B0=φ[r+(l/2-d)cosθ]-(l/2-d)sinθ
B1=r+(l/2-d)cosθ
B2=-(l/2-d)sinθ
同时,在楼梯地面与侧面表面具有相同的接触条件下,在A处忽略履带相对地面的滑动影响,定义:
φ=φ2-f2=φ1-f1
式中,f1、f2分别为楼梯地面和侧面的摩擦因数;φ2-f2、φ1-f1分别为楼梯地面与楼梯侧面的驱动摩擦因数。
则质心绕质心力矩平衡方程为
(3)
式中,Js为履带系统转动惯量。
结合式(1)~式(3),可得F1的表达式:
(4)
记
由式(4)可得
Pφ2+Qφ+W=0
可确定履带在地面行驶的摩擦因数
在履带爬坡状态结束时,即履带前端部分以第一阶楼梯的尖角D点为支点,能够翻越第一阶楼梯(图7a)的最大高度
H=r+(l/2+d)sinθ-r/cosθ
翻越最大高度时的爬坡角满足下式:
3.1.2 爬楼第二阶段
履带姿态保持不变,为了稳定运行,履带长度一般保证能够同时与楼梯的3个尖角接触(图7b),故要求[7]:
3.2 履带参数的确定
设常用楼梯h=100 mm,b=200 mm,为保证履带能顺利攀越楼梯,计算分析显示:在利用传统长圆节线履带结构实现爬楼时,履带中心长度不得小于450 mm,故履带整体长度设计为L0=800 mm,履带中心长度l=517 mm,可满足爬楼要求。
(a)第一阶段
(b)第二阶段图7 履带爬楼过程Fig.7 Process of climbing stairs with track
3.3 履带运动仿真分析
为了分析履带爬楼时移动系统的运动平稳性,运用RECURDYN软件的自带模块进行运动仿真分析,将移动系统简化为工程车模型,代入上述参数,得到移动系统爬楼仿真过程,如图8所示。
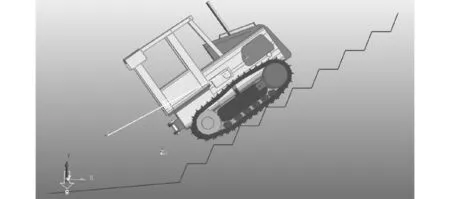
图8 履带移动系统爬楼仿真过程Fig.8 Simulation process of climbing stairs with track
仿真结果如图9所示,移动系统质心位移随时间增加而增大,在爬楼第一阶段由于需克服重力作用爬楼,此处曲线抖动较大;随着爬楼第二阶段的到来,曲线较平缓;当重心超过最后一个台阶的右铅垂线时,移动系统在重力的作用下,翻向台阶上端平面,质心下降。
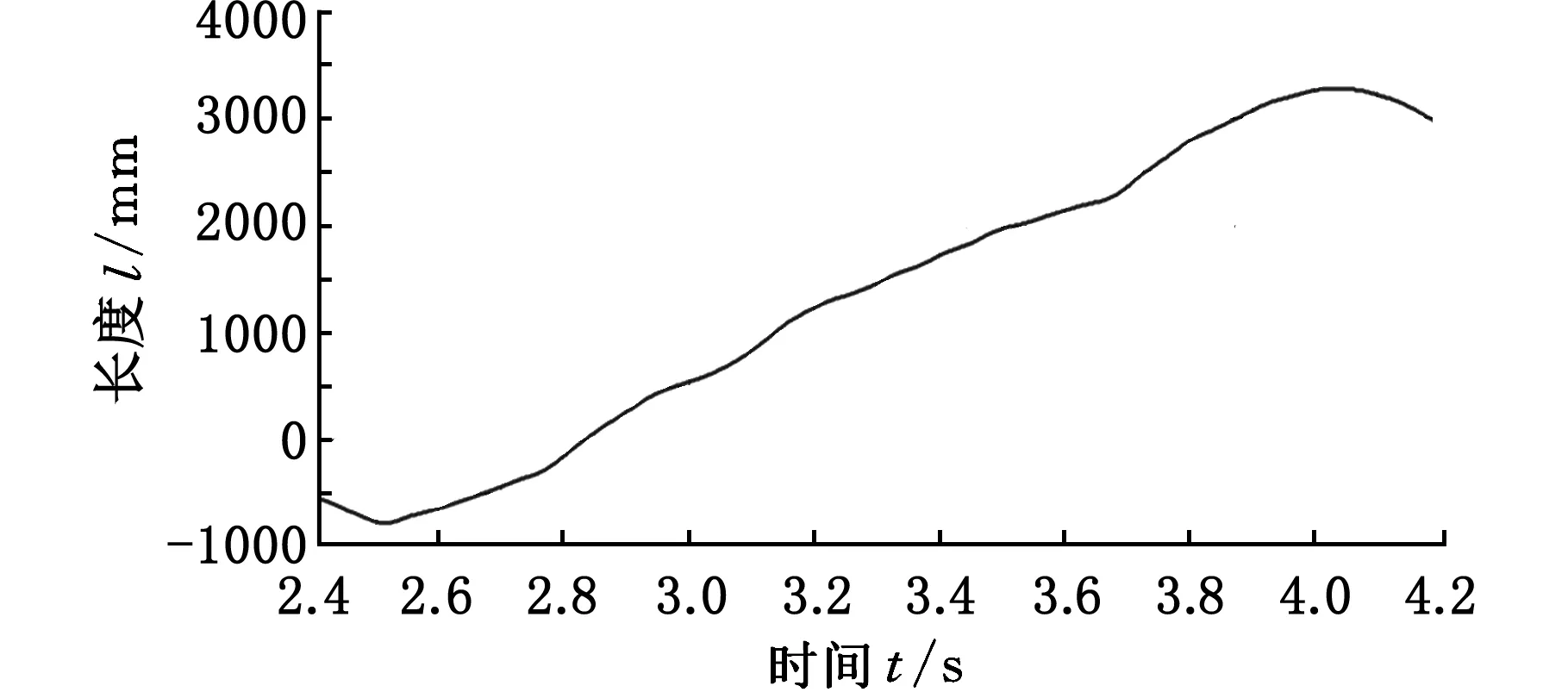
图9 履带移动系统的质心位移图Fig.9 Centroid displacement diagram of track
此外移动系统质心的最大偏转角度也出现在爬楼的第一阶段,其值为0.3°,如图10所示。随着进入爬楼第二阶段,质心的偏转角逐渐减小,摆动幅度在±0.1°之间,运动平稳性较好,满足了货物爬楼运输高安全性的要求。图11所示为履带前轮质心在爬楼过程在不断接触台阶前沿的偏转角变化曲线,结果大体呈周期性变化,其变化范围在±2°之间,符合运动规律,体现出整个底盘在爬楼过程中运动的高平稳性,保证了货物的安全。
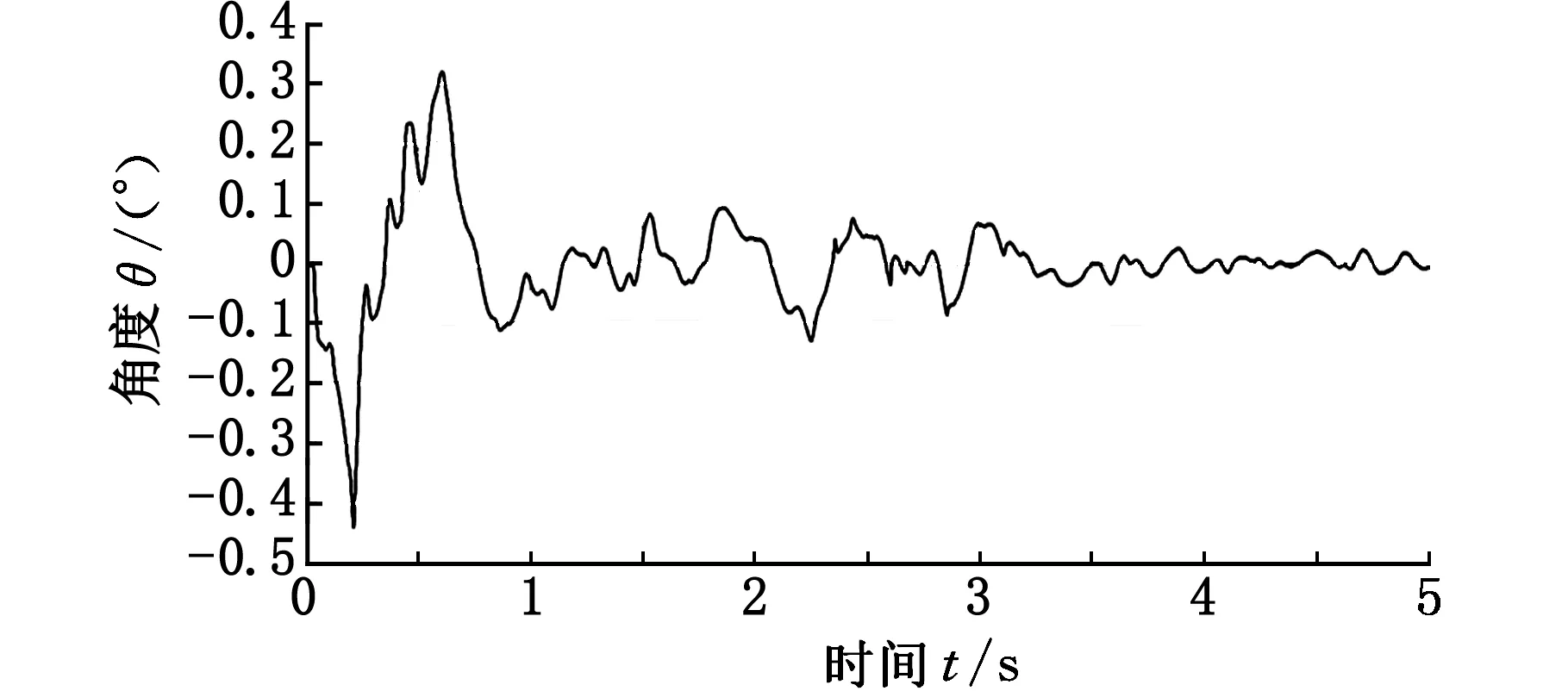
图10 履带移动系统的质心偏转角位移图Fig.10 Centroid displacement diagram of deflection angle of track
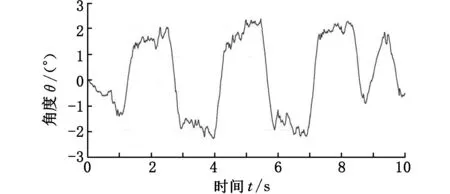
图11 履带前轮的质心偏转角位移图Fig.11 Centroid displacement diagram of deflection angle of track’s front wheels
3.4 变径步行轮参数设计
变径轮的设计必须满足以下条件:①步行轮张开时直径大于履带轮直径;②步行轮收起时直径小于履带轮直径。
由于采用普通花键与变径轮连接,变径轮的伸缩旋转角为60°,则变径轮的最大伸展直径为220 mm,最小收缩直径为195 mm。
根据上述要求,确定变径轮的各部件参数:步行轮半径110 mm;大径、中径和小径的弧度范围分别为32°、20°和10°;曲柄长38.38 mm;连杆长50 mm。
3.5 变径步行轮运动分析
步行轮在伸展过程中会接触地面,地面对它的支撑力对大径和中径上的杆件产生不可忽略的作用,而杆件正是整个变径步行轮的最薄弱环节,故用RECURDYN软件对杆件进行受力分析[8],其模型如图12所示。
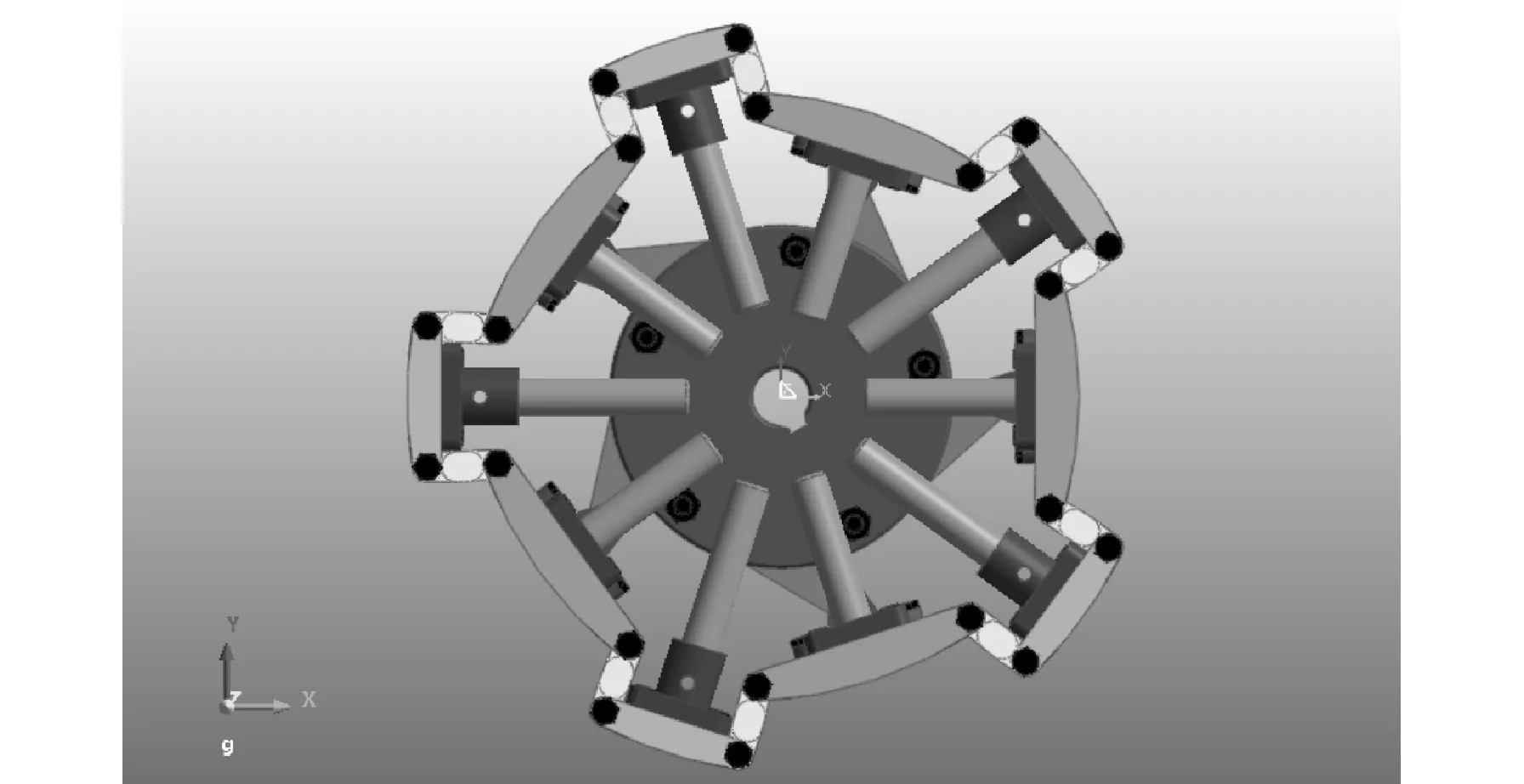
图12 RECURDYN中变径步行轮模型Fig.12 Diameter-alternative wheel in RECURDYN
由于步行轮和履带通过花键进行连接,步行轮在伸展过程中以固定姿态接触地面,即接触地面为固定位置,故找到最佳的着地位置会使整个伸展过程受力最小且更加稳定。而考虑到变径轮伸展过程的稳定性,则有两种与地面接触的方式:①大径与地面接触;②中径与地面接触。
假设承受货物20 kg,则变径步行轮的模拟受力为200 N,分别对两种接触方式进行多体动力学仿真,得到中径着地某一瞬时受力方向,如图13所示,此时支撑杆受到较小的正压力,而中径和小径均受到较大的横向力。
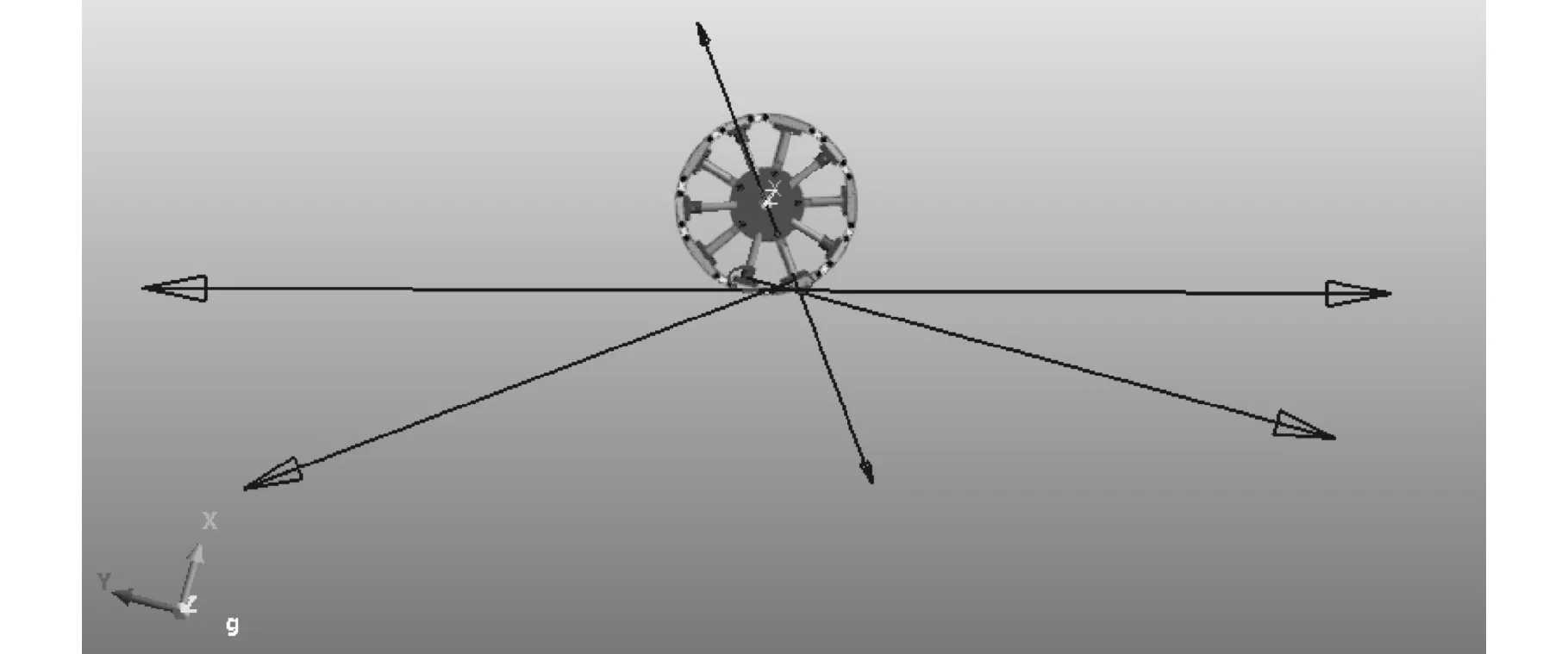
图13 中径受力结果Fig.13 Force results of intermediate diameter
由图14可知,大径接触地面的伸展方式仅有连杆受力,中径和小径均不受力,且变化量很小,其受力曲线如图15所示,其受力随着伸展而减小,最大值为175 N。
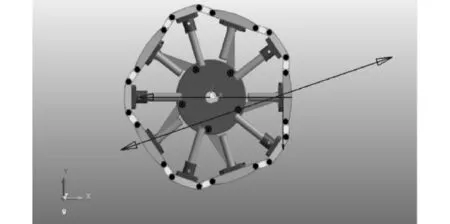
图14 大径受力结果Fig.14 Force results of large diameter
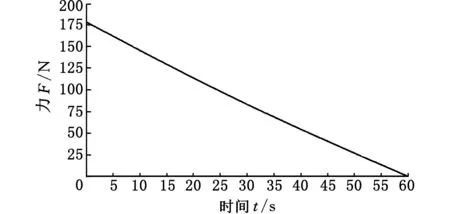
图15 杆件受力曲线Fig.15 Force curve of lever
因为变径步行轮在行走过程中时刻都受地面接触力的影响,且每个杆件受交变应力的影响,故对变径步行轮行走过程进行多体动力学仿真,结果如图16所示,应力最大值为500 N,车体质量设定为货物的总质量40 kg,满足运动要求。
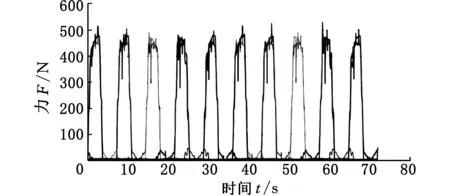
图16 变径步行轮行走过程杆件所受交变应力曲线Fig.16 Alternating stress curve of levers in diameter-alternative wheel in walking process
4 自适应平衡载物平台设计
为了进一步提高移动系统在爬楼过程中的货物安全性,设计了双剪叉式可倾斜载物升降平台,平台安装陀螺仪运用卡尔曼算法,使得载物平台在爬楼过程中始终保持平台自适应水平,从而提高了对于特殊货物的安全适用性。
4.1 载物平台设计
自适应平衡载物平台采用双剪叉机构实现其倾角可调性,如图17所示。将差动螺旋机构作为双剪叉机构驱动机构,差动螺旋机构由两条滚珠丝杠与直动滑轨组成,通过两个步进电机独立控制,将电机的转动量转换为丝杠螺母的直线运动,两侧直动滑轨起到方向的控制与承重的作用。
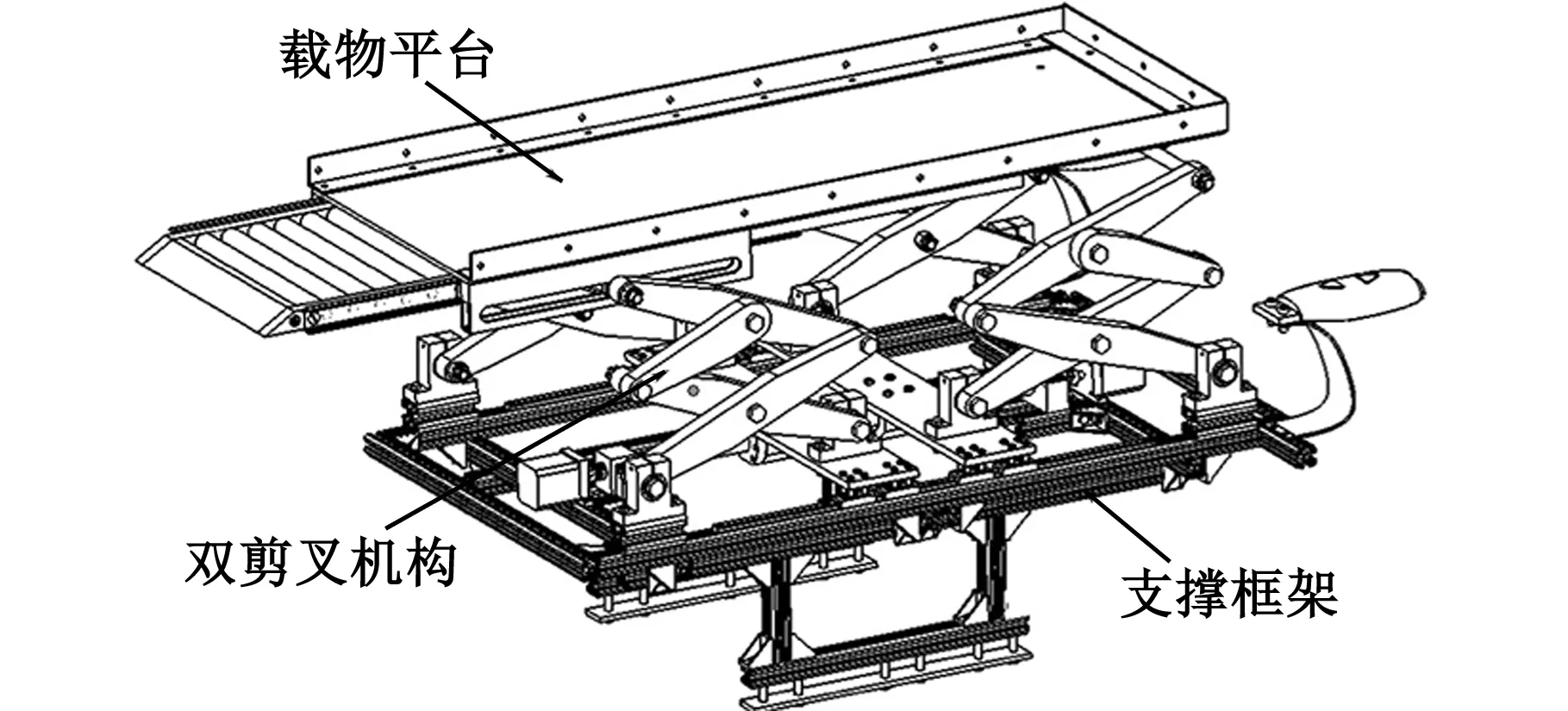
图17 升降平台示意图Fig.17 Schematic diagram of lifting platform
4.2 卡尔曼滤波算法[9-10]
卡尔曼滤波算法的具体过程见文献[9]。
4.3 陀螺稳定平台闭环控制
根据所设计的单轴载物陀螺稳定平台,由安装在其上的陀螺仪作为测量反馈元件,构建闭环控制系统,如图18所示,通过单片机对陀螺仪和加速度计进行AD采样,将采集的数据进行滤波处理并计算姿态参数,得到控制量以驱动两个丝杠步进电机实现平台自适应平衡。
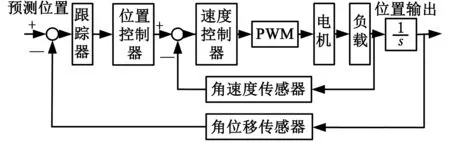
图18 平台陀螺稳定控制系统Fig.18 Gyro-stabilized platform control system
5 实物验证
根据前述设计,制作移动系统实物模型,具体参数如下:主要材料为铝合金,载物平台长为800 mm、宽为450 mm,载物平台底端距地面高度为189 mm,其升降最大高度为900 mm,最大倾斜角为35°。变径步行轮的最大伸展直径为220 mm,最小收缩直径为195 mm。通过轮履复合移动系统在两种不同路面环境中的运动情况对其行进机构参数、传动系统等设计的合理性进行验证。
(1)试验Ⅰ。如图19a所示,当移动系统在平坦路面运动时,能够保持轮式运动。图19b中,履带腾空,后脚踏板放下,在万向轮和变径轮的共同作用下,可经操作人员的控制,完成平地快速行走功能,有效提高了运输效率。
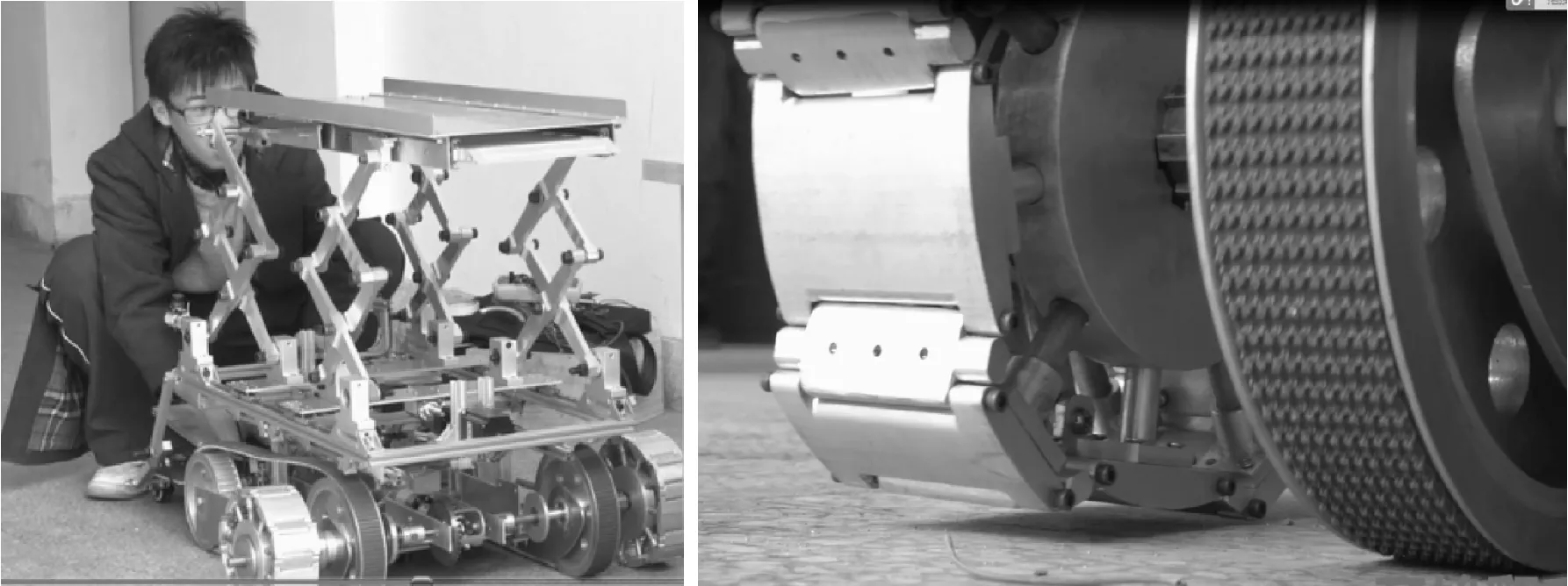
(a)平地行走 (b)轮履切换 图19 平地行走性能验证Fig.19 Verification of running performance
(2)试验Ⅱ。如图20所示,在攀越楼梯时,操作人员将后脚踏板收起,通过拨叉机构实现了轮履切换,变径轮缩小,移动系统在履带模式下继续工作,实现平稳爬楼,同时升降平台实现自适应平衡功能,保证平台始终水平,增强了移动系统的越障性能,提高货物运输的安全性。

图20 爬楼性能验证Fig.20 Verification of climbing stairs performance
6 结论
(1)设计了由并联曲柄滑块机构组成的变径轮系统,利用拨叉切换变径轮系统和履带系统,以适应不同运动模式。
(2)采用差动螺旋控制双剪叉机构的伸缩,实现了平台的水平升降和任意角度的倾斜,以适应平台不同接口的需要。
(3)通过安装在平台下的陀螺仪,运用卡尔曼滤波算法,实现了平台倾角自适应水平姿态闭环控制。
[1] 程凡强,陈述平.履带式折叠越障搜救车的设计[J].机械,2012,39(6):52-54. CHENG Fanqiang, CHEN Shuping. The Design of a Crawler-type Search-and-rescue Vehicle with Foldable Obstacle-stridingfunction[J].Machinery,2012(6):52-54.
[2] 王朝阳,胡淼,汤永红.轮履复合式移动机器人设计及越障功能分析[J].机械传动,2010,34(4):38-41. WANG Chaoyang, HU Miao,TANG Yonghong. Design and Analysis of Surmounting Obstacle Function for Wheel-track Mobile Robot [J].Journal of Mechanical Transmission,2010,34(4):38-41.
[3] 段星光, 黄强,李科杰.小型轮履腿复合式机器人设计及运动特性分析[J].机械工程学报,2005,41(8):108-114. DUAN Xingguang, HUANG Qiang, LI Kejie. Design and Motion Analysis of Miniature Wheel-track-legged Mobile Robot [J]. Journal of Mechanical Engineering,2005,41(8):108-114.
[4] 赵希庆,尚建忠,罗自荣,等.四连杆变形履带式机器人的越障性能分析[J].机械设计与研究,2009,25(6):36-39. ZHAO Xiqing,SHANG Jianzhong, LUO Zirong, et al. Analysis on the Performance of Obstacle Surmounting for Deformable Tracked Robot with Four Links [J]. Machine Design and Research,2009,25(6):36-39.
[5] 隆文革,王艾伦.一种多姿态便携式履带机器人的机械传动设计[J].机械传动,2007,31(6):52-57. LONG Wenge,WANG Ailun.The Mobility Design of a Kind of Man-portable Caterpillar Robot [J].Journal of Mechanical Transmission, 2007,31(6):52-57.
[6] PENG S T, SHEN J J, CHANG C C. A Control Scheme for Automatic Path Tracking of Vehicles Subject to Wheel Slip Constraint[C]//Proceeding of the 2004 American Control Conference.Boston, 2004:804-809.
[7] 孙传琼,刘雍德,任爱华.梯形齿同步带传动最大额定功率计算[J].机械传动,2009,33(3):59-60. SUN Chuanqiong, LIU Yongde, REN Aihua. Calculation of Maximum Power Rating of Trapezoidal Toothed Synchronizing Belt Drive System[J].Journal of Mechanical Transmission, 2009,33(3):59-60.
[8] 曲杰,钟伟斌.轮履复合式变形车轮的设计与越障性能分析[J].华南理工大学学报(自然科学版),2013,41(5):119-124. QU Jie, ZHONG Weibin. Design and Obstacle-surmounting Performance Analysis of Wheel-track Transformable Wheel [J].Journal of South China University of Technology(Natural Science Edition), 2013,41(5):119-124.
[9] 杨凌霄,李晓阳.基于卡尔曼滤波的两轮自平衡车姿态检测方法[J].计算机仿真, 2014,31(6):406-409. YANG Lingxiao, LI Xiaoyang. Attitude Estimation Based on Kalman Filter for Two-wheel Self-balancing Vehicle [J].Computer Simulation, 2014,31(6):406-409.
[10] 李浩,侍才洪,康少华,等.轮履复合救援机器人的乘适性 分析与优化[J].中国机械工程,2015, 26(11):1444-1449. LI Hao, SHI Caihong, KANG Shaohua, et al. An-alysis and Optimization of Ride Comfort for a Wheel-tracked Rescue Robot [J]. China Mechanical Engineering, 2015,26(11):1444-1449.
(编辑 陈 勇)
Design and Analysis of Wheel-track Composite Loading Locomotion System with High Adaptability
WANG Shukun CAO Xiaojie ZHANG Lianqing ZHU Renjie ZHANG Bo
School of Mechanical and Electrical Engineering,Changchun University of Science and Technology,Changchun,130012
A new type of travel mechanism combined wheel and track was based on different kinds of complex unstructured pavement conditions. The wheel-track composite mechanism was mainly composed of diameter-variable wheel component and crawler system. This structure gave full play to the characteristics of the high efficiency of the wheel structure,and shown the crawler system which enhanced the stability of the whole machine and good adaptability to the ground. Simultaneously, an adaptive loading-lifting platform was designed. In order to achieve the horizontal platform always, the closed-loop control was established to the degree of platform by using Kalman filter algorithm through Gyroscope. A dynamic model was established for verification of climbing stairs performances by using RECURDYN. The results show that this new locomotion system has good adaptability for complex conditions and stability for maintaining loading platform, which has certain reference values for the design of associated transport machinery.
wheel-track composite mechanism; diameter-variable wheel; adaptive lifting platform; loading
2016-06-28
吉林省科技厅重点科技攻关项目(20150204043GX)
TP302
10.3969/j.issn.1004-132X.2017.15.011
王淑坤,女,1969年生。长春理工大学机电工程学院教授、博士研究生导师。研究方向为机械设计及理论。E-mail:825196709@qq.com。曹晓捷,女,1994年生。长春理工大学机电工程学院本科生。张连青,女,1994年生。长春理工大学机电工程学院本科生。朱人杰(通信作者),男,1995年生。长春理工大学机电工程学院本科生。张 博,男,1994年生。长春理工大学机电工程学院本科生。
猜你喜欢
祝您健康(2024年3期)2024-03-03 13:27:39
矿冶工程(2023年6期)2024-01-20 10:21:38
选煤技术(2023年2期)2023-08-09 05:56:48
包装工程(2022年11期)2022-06-20 09:41:52
物流技术(2021年5期)2021-06-01 06:29:02
装备制造技术(2020年1期)2020-12-25 05:18:30
机械设计与制造(2018年2期)2018-03-05 12:33:02
青岛画报(2018年1期)2018-02-23 12:07:50
方圆(2017年24期)2018-01-17 20:55:33
电子制作(2017年14期)2017-12-18 07:07:49