基于加权最小二乘拟合的电动车ACC模式仲裁切换策略研究
2017-08-22 05:28李天骄孙成伟
汽车工程学报 2017年4期
初 亮,李天骄,孙成伟
(吉林大学 汽车仿真与控制国家重点实验室,长春 130022)
基于加权最小二乘拟合的电动车ACC模式仲裁切换策略研究
初 亮,李天骄,孙成伟
(吉林大学 汽车仿真与控制国家重点实验室,长春 130022)
传统自适应巡航模式仲裁切换策略因未考虑环境变化对于基准加速度的影响,从而导致模式频繁切换,加速度控制不精确。因此,设计了实时在线拟合的模式仲裁切换策略,利用拟合方法辨识行驶阻力模型关系式参数。对传统最小二乘算法引入遗忘因子加权,削弱历史数据影响,满足对时变数据的跟随。优化求解算法,通过递推运算提高算法效率从而满足控制实时性要求。仿真验证算法在外界有风速干扰和坡度干扰的情况下预测基准加速度的准确性,结果显示,稳态时预测基准加速度准确性较高;在外界环境突变后,算法能较快适应新的环境参数。
公路运输;模式仲裁切换策略;最小二乘拟合;自适应巡航;纯电动车
电动车自适应巡航控制(Adaptive Cruise Control,ACC)系统纵向动力学控制包括驱动控制和制动控制。通过控制驱动电机电流,输出驱动转矩,经过主减速器、半轴、车轮传导到地面实现整车的驱动;通过控制车身电子稳定性控制系统能量吸收式方向机 柱(Energy-absorbing Steering Column Electronic Speed Controller, ESC)的柱塞泵和电磁阀,获得制动压力,再经过轮缸、制动钳、制动盘、车轮等传导到地面实现整车的制动。由于驱动控制和制动控制的传递路径以及控制方法差异较大,在ACC系统中驱动控制算法和制动控制算法一般分为两个独立的控制模块,二者不能同时动作[1-2]。因此,在ACC系统中需要一个控制模式仲裁切换策略,决策对于需求状态的控制模式。
由于车辆传动系和制动系的内部阻力以及外界环境对车辆的行驶阻力的存在,车辆在滑动状态(既不驱动也不制动)下不会产生0加速度,其值会随着外界阻力的变化而变化,定义滑动状态时的加速度为基准加速度。基准加速度的选取对车辆驱动控制或制动控制有着重要的意义,基准加速度选择的不精确,会导致ACC系统工作时在驱动模式和制动模式之间频繁切换,不仅加快部件磨损,还会导致实际的加速度或减速度相较于目标值产生较大的误差。
目前,对于电动车ACC控制模式仲裁切换策略的研究较少。裴晓飞等[3]提出一种ACC分层控制算法,通过取车辆节气门开度为0的滑行试验,直接测出不同车速下该车能够获得的最大减速度值,结果滤波得到节气门/制动控制切换时的加速度基准曲线。李以农等[4]通过分析车辆纵向动力学模型,列解加速度基准曲线方程,并在切换面加入缓冲层,建立加速/制动的逻辑切换规律。总之,目前对于ACC系统的控制模式仲裁切换策略主要有两种方案,一种是通过一次试验获得车速-基准加速度关系表,通过查表法得到不同车速下的基准加速度;另一种是根据车辆驱动和制动的动力学模型,得到车速-基准加速度关系式,通过代入计算式求解得到基准加速度。然而两种方案均是通过一次离线计算获得车速-基准加速度关系,未考虑外界阻力变化对基准加速度曲线的影响。对于不同参数的车型需要重新进行试验或参数匹配,因而带来额外的成本和工作量。
针对常规ACC控制模式仲裁切换策略的不足,本研究建立了一种在线获得车速-基准加速度关系式的ACC控制模式仲裁切换算法,可以根据历史数据实时修正车速-基准加速度关系曲线。首先分析车辆纵向动力学模型,得到车速-基准加速度关系式,并通过改进的最小二乘拟合法实时拟合关系式参数。考虑传统最小二乘拟合法计算量大,难以满足整车控制器实时性计算要求,本研究优化了传统最小二乘拟合法,通过递推运算大幅减少计算量,同时考虑到外界环境的突变,对于最小二乘拟合法引入遗忘因子加权,通过对历史数据折旧使算法快速适应外界环境变化。
1 车辆纵向动力学模型分析
面向ACC系统的动力学分析仅需考虑车辆纵向动力学分析,即驱动、制动过程的动力学模型。汽车在行驶过程中的受力如图1所示。
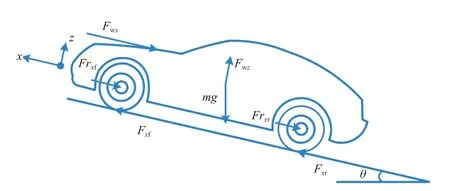
图1 汽车受力示意图
汽车在行驶过程中受到的阻力主要包括四部分:滚动阻力、空气阻力、坡度阻力、加速阻力。由驱动电机、传动系统传递的力矩作用于车轮上,以克服上述阻力。列出汽车驱动力与行驶阻力平衡方程式为[5]:

式中:Ft为汽车驱动力;Fr为滚动阻力;Fw为空气阻力;Fi为坡度阻力;Fa为汽车受到的加速阻力。
1.1 驱动力
汽车的驱动力由电机产生的驱动转矩经过主减速器和半轴传递至车轮。计算式(2)为:

式中:Mmotor为电机转矩,Nm;r为轮胎滚动半径,m;ig为变速器传动比;i0为主减速器传动比;ηt为传动系总传动效率。
1.2 制动力
ACC状态的制动力由ESC柱塞泵增压,控制ESC的溢流阀实现压力控制。制动压力传递至轮缸,经过制动钳作用于车轮产生制动力。计算式(3)为:

式中:Fb为路面作用于轮胎的总制动力,N;μw为制动盘效能因数;Dw为制动轮缸有效直径,m;Pc为轮缸制动压力,Pa;Re为制动盘有效半径,m。
1.3 滚动阻力
通常认为各车轮受到的滚动阻力相等,且所有车轮载荷之和等于车重。若在坡度为θ的道路行驶,滚动阻力计算式(4)为:

式中:fR为滚动阻力系数;G为整车重量,N;θ为坡度角。
随着车速的提高,车身会受到沿着车身z轴方向的空气升力,考虑空气升力,滚动阻力计算式(5)为:

式中:Fwz为空气沿汽车法向产生的升力,N。
1.4 空气阻力
车辆会受到沿着纵向的空气阻力以及沿着法向的空气升力。空气阻力与本车速度和环境风速有关,计算式(6)为:
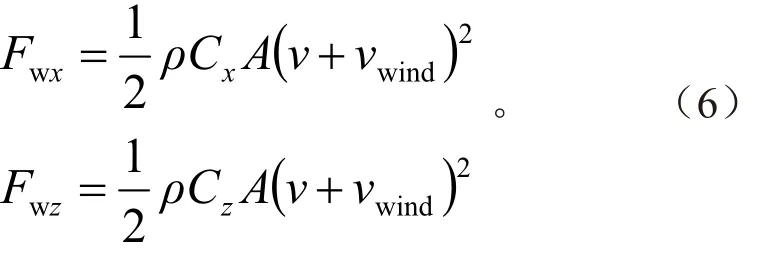
式中:Fwx为沿着汽车纵向的空气阻力,N;ρ为空气密度,N·s2/m4;Cx为纵向空气阻力系数;Cz为垂向空气阻力系数;A为车辆迎风面积,m2;vx为纵向车速,m/s;vwind为纵向风速,m/s。
1.5 坡度阻力
当道路有坡度时,汽车重力沿着道路方向的分量表现为坡度阻力,坡度阻力大小和方向与坡度角有关。

1.6 加速阻力
车辆加速或减速时,由车辆平移质量,传动轴、车轮等旋转部件的转动惯量引起的惯性阻力成为加速阻力,一般用旋转质量换算系数将旋转部件的转动惯量换算为车辆平移质量。
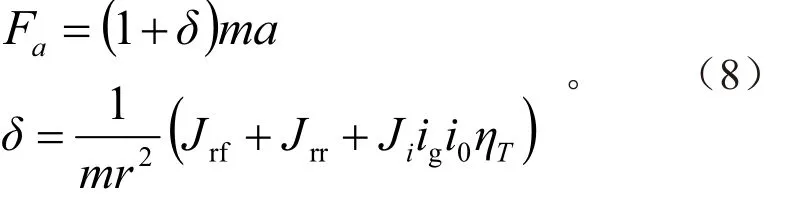
式中:δ为旋转质量换算系数;m为车辆整备质量,kg;a为车辆纵向加速度,m/s2;Jrf为前轴转动惯量,kg·m²;Jrr为后轴转动惯量,kg·m²;Ji为传动系转动惯量,kg·m²。
2 模式仲裁切换策略
根据汽车纵向动力学模型,在车辆滑行状态下的车辆加速度与速度存在的二次关系式为:

车辆在行驶过程中,由于外界风速、道路坡度等因素均在不断变化,关系式中的系数A、B、C数值也在不断变化。可以考虑在行驶过程中利用最小二乘拟合法实时辨识关系式中的参数,然而传统最小二乘拟合法不但计算量大,效率低,难以实现汽车控制系统实时性的要求,而且其拟合多项式参数多基于离线数据,当外界环境变量突变后,算法对于时变数据的跟踪能力不够,导致环境变化初期参数辨识结果不准确。本研究基于上述两点,优化了传统最小二乘拟合法。
2.1 最小二乘拟合法
首先介绍传统最小二乘拟合法[6]。假设给定一个数据训练集:

式中:xi∈R为输入变量x的观测值;yi∈R是对应输出变量y的观测值;i=1,2,3,4,…,N。解决的问题是基于最小二乘法,利用已有观测值拟合目标多项式的参数。欲拟合的N次多项式可定义为:
式中: wi为第i次多项式拟合的系数。
令各点到曲线的距离最小,偏差平方和最小:

式中:L(w)为各点到拟合曲线的偏差平方和。
为求得符合条件的wi,用式(11)求偏导得式(12):
对于求解的wi,可以整理为式(13)所示的正规方程组。
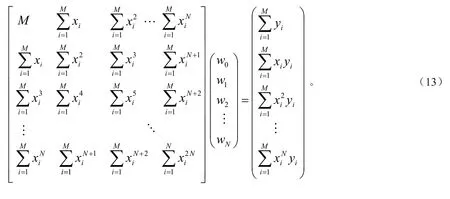
求解方程组即可求得(w1,w2,…,wm)。
2.2 加权递推的最小二乘法拟合算法
针对本文研究的问题,令xi为观测的车速历史数据,yi为观测的加速度历史数据。选取观测数据点越多,抗噪声性越强,拟合精度越高,同时计算效率降低,当数据点过多时,最小二乘拟合法会出现数据饱和现象,以致算法失去修正能力[7]。选择合适的观测数据队列规模,以兼顾算法的准确性及跟随性。每一个采样周期观测数据(xi,yi)储存于队尾,同时剔除队首观测数据,并对新一组观测数据进行参数拟合。
传统最小二乘拟合法对于每一个数据点的重要度是相同的,然而在车辆行驶过程中,外界环境变量发生变化,算法往往希望拟合结果能尽快适应新的环境。变化后的环境信息一般蕴藏在新观测的数据点中,而与先前观测数据点的关系将逐渐减弱。利用遗忘因子λ来降低老数据提供的信息量。定义遗忘因子λ∈(0,1),与观测时间呈线性关系如式(14)所示,观测时间越靠后遗忘因子越大,数据点重要程度越高。

根据给定的数据集(xi,yi)(i=1,2,3,4,…,M),将最小二乘拟合法所得式(11)修正为式(15):

相应得到的正规方程组(16)为:

定义
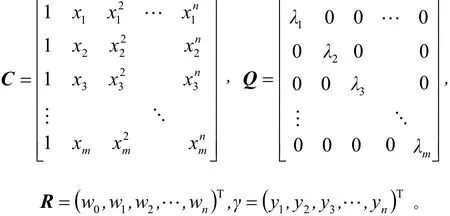
正规方程组可化为:

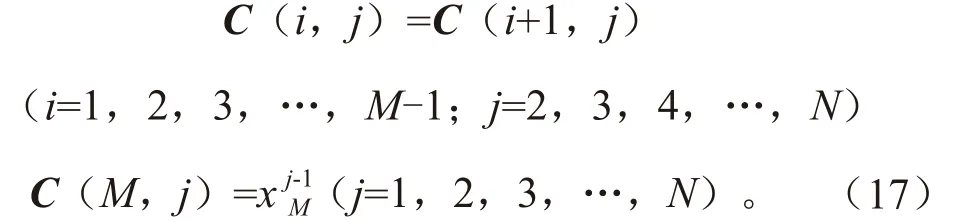
式中:矩阵Q、矩阵R及向量γ均为定值。在每次辨识参数过程中,仅需重新计算矩阵C,解正规方程组即可求解多项式参数(w0,w1,w2,…,wn)。C矩阵中在传统求解最小二乘拟合法中,需要完成所有观测点幂指数的运算难以满足整车控制器实时运算要求。然而对于该问题,每一个周期的观测数据序列仅是第一个观测点和最后一个观测点发生了变动,因此仅需计算最新获取的观测点的幂指数值并将C矩阵数据平移一位,即可实现求解计算。如式(17)所示,算法复杂度为O(N),大大提高计算效率。
当ACC系统输出的期望加速度在基准加速度时,由于基准加速度的实时变化,将导致控制系统频繁地在驱动模式和制动模式之间切换,不仅带给驾驶员不舒适的驾乘感受,还会加速执行机构的磨损老化。在切换逻辑曲线上下两侧设置一个宽度范围为2H的缓冲区域[8],一般取缓冲区域H=0.1 m/s2,如图2所示。
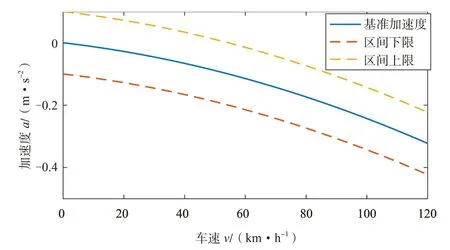
图2 模式切换逻辑曲线
模式仲裁切换策略包括参数辨识和模式仲裁两部分,如图3和图4所示。参数辨识算法运行周期为0.2 s,模式仲裁运行周期与ACC控制层运行周期一致。在参数辨识模块中,首先从CAN总线获取本车的车速和加速度信息,并将车速和加速度加入观测数据队列。若队列数据填满,剔除第一组观测数据,更新C矩阵数据,根据队列长度产生权重矩阵Q。然后求解正规方程组,得到多项式系数向量R,并向模式仲裁模块输出辨识参数A、B、C。
模式仲裁模块与ACC控制层协同工作。ACC控制层响应决策层目标加速度需求,交由模式仲裁模块确定驱动模式或制动模式。模式仲裁模块根据当前车速和辨识参数确定基准加速度a0。若目标加速度ades大于a0+H,则切换为驱动控制模块,修正目标加速度为ades-a0。若目标加速度ades小于a0-H,则切换为制动控制模块,修正目标加速度为ades+a0,输出至制动控制模块。若目标加速度ades在a0-H与a0+H之间,则保持原有工作模式,不对目标加速度进行修正。
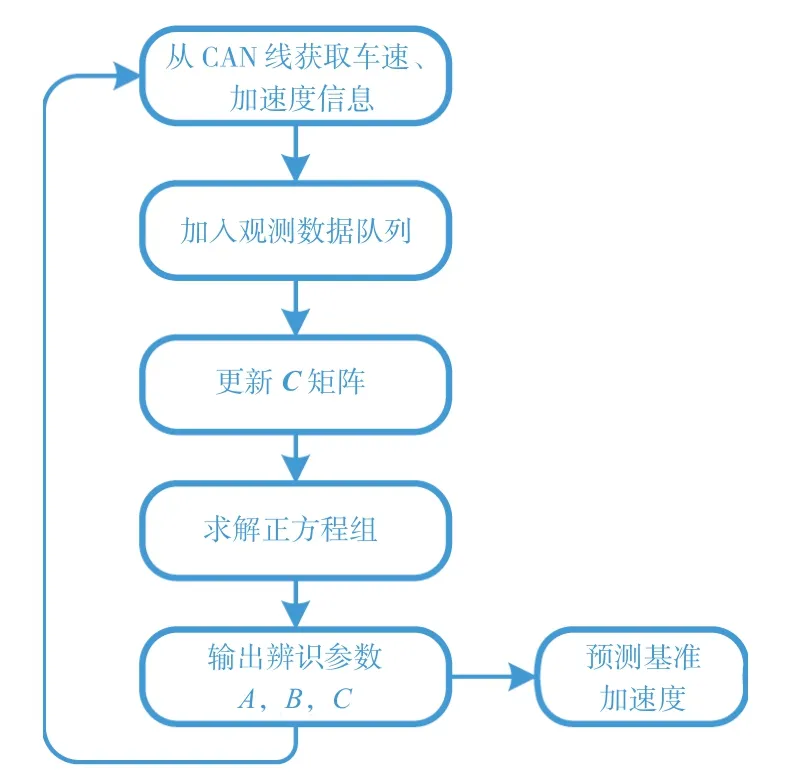
图3 参数辨识模块流程图
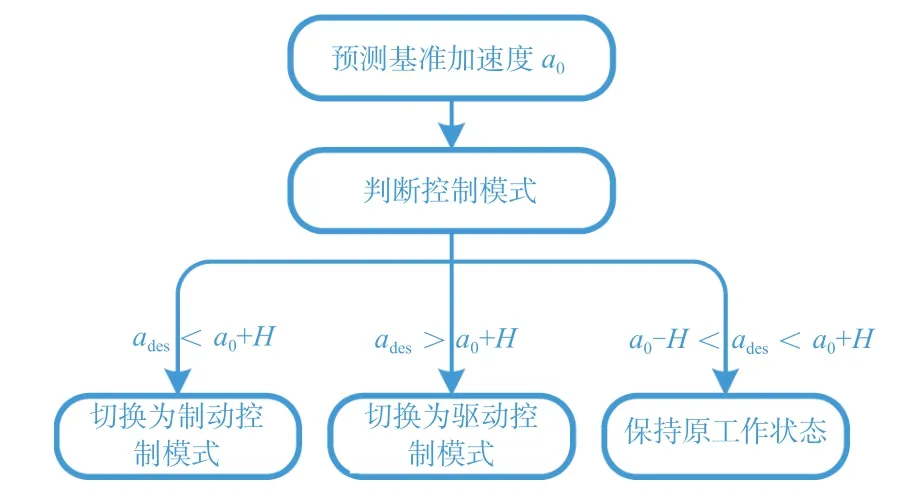
图4 模式仲裁模块流程图
3 仿真与结果分析
为验证算法的预测精度,本研究在Matlab/ Simulink下与CarSim 进行联合仿真。在CarSim中模拟环境变量,设置风速、坡度作为干扰量。在Matlab/Simulink中搭建模式仲裁切换算法的控制模型。设置车辆初始速度为120 km/h,使车辆在直线道路上滑行。设置模式仲裁切换算法的观测数据队列长度M=10。在CarSim中定义风速时间历程如图5所示。
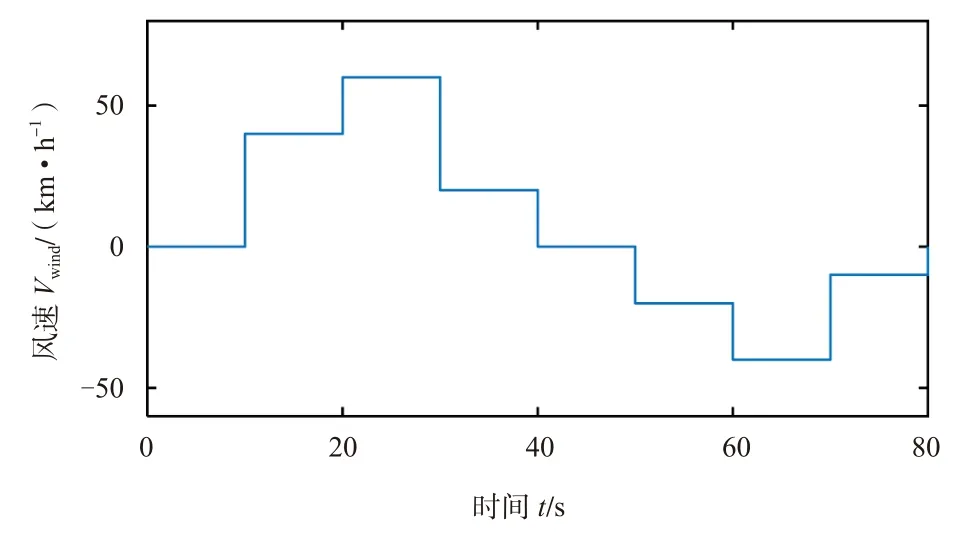
图5 风速时间历程曲线
预测基准加速度曲线如图6所示。由图可知,其中虚线为实际车辆加速度,实线为模式仲裁切换策略预测的基准加速度。预测基准加速度误差率如图7所示,在外界环境突变时,预测有较大误差,平均误差率为0.98%。结果表明,本研究所设计的模式仲裁切换算法预测基准加速度能够实时跟踪外界环境变化,且有较高的预测精度。仿真过程车速变化曲线如图8所示,仿真结束时车速为48 km/h。
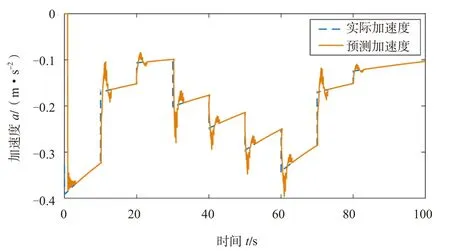
图6 预测基准加速度曲线
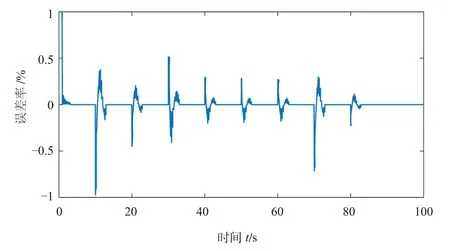
图7 预测基准加速度误差率
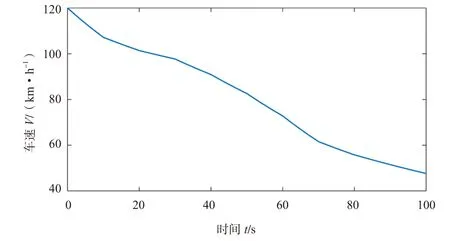
图8 仿真过程车速变化曲线
下面截取0~15 s数据进一步分析仿真初始阶段及外界环境突变后的仿真结果,如图9所示,由于拟合二次多项式参数,需要至少3组数据,因此在前3个周期内无输出预测基准加速度。从第4个周期开始,随着观测数据队列长度的增加,预测基准加速度逐渐贴近实际加速度。在10 s时,风速由0 km/h突变为40 km/h,预测基准加速度曲线在延迟和超调后趋于稳定,适应了外界环境的变化,说明本研究基于加权最小二乘拟合法具有对外界变化较好的跟随性。
CarSim中定义道路高度变化如图10所示。仿真参数不变,验证算法在坡度干扰下的仿真,结果如图11和图12所示。图11为预测基准加速度曲线,整体跟随性较好,在坡度变化较大的位置,误差率较高。图12为车速变化曲线,仿真终止时车速为64 km/h。
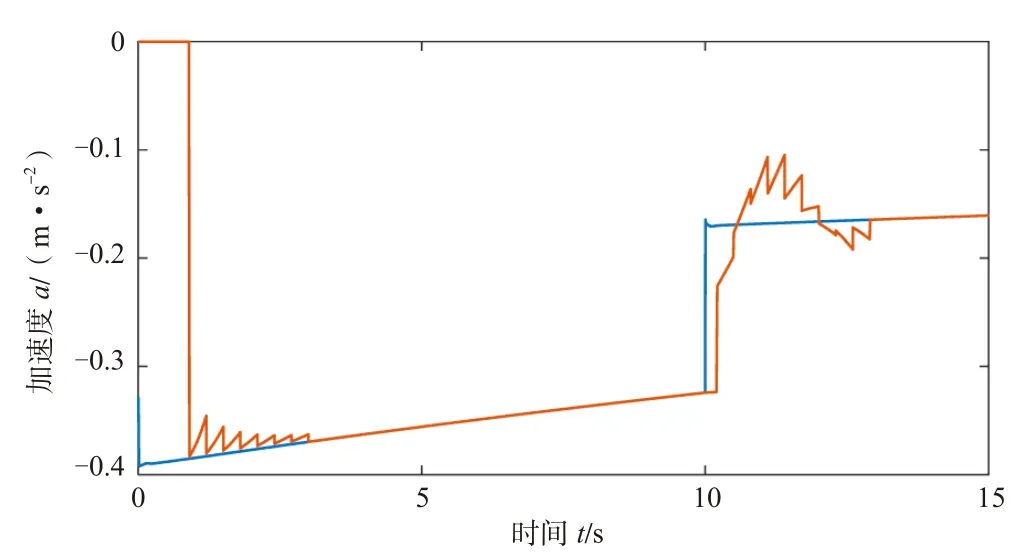
图9 初始段仿真曲线
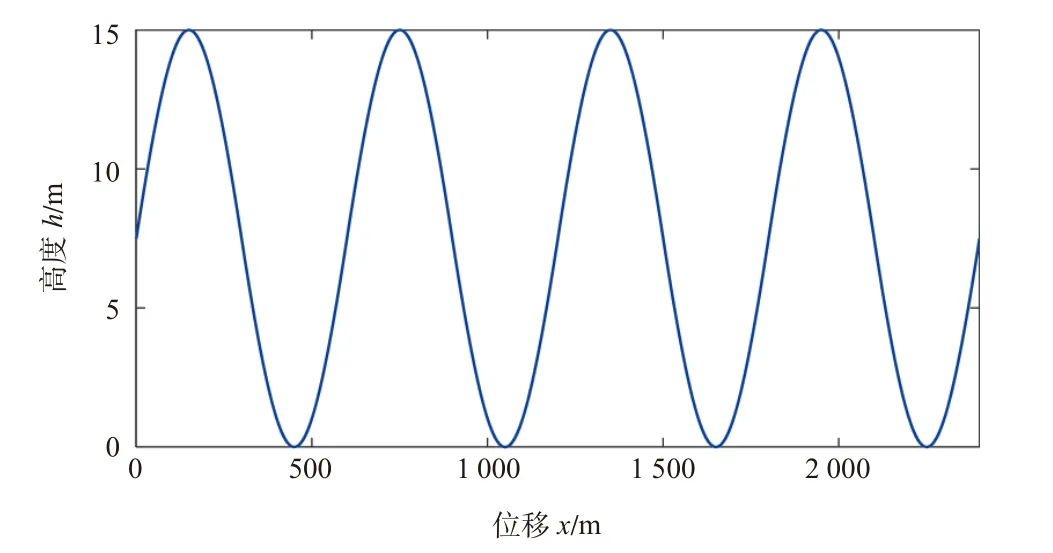
图10 道路高度变化
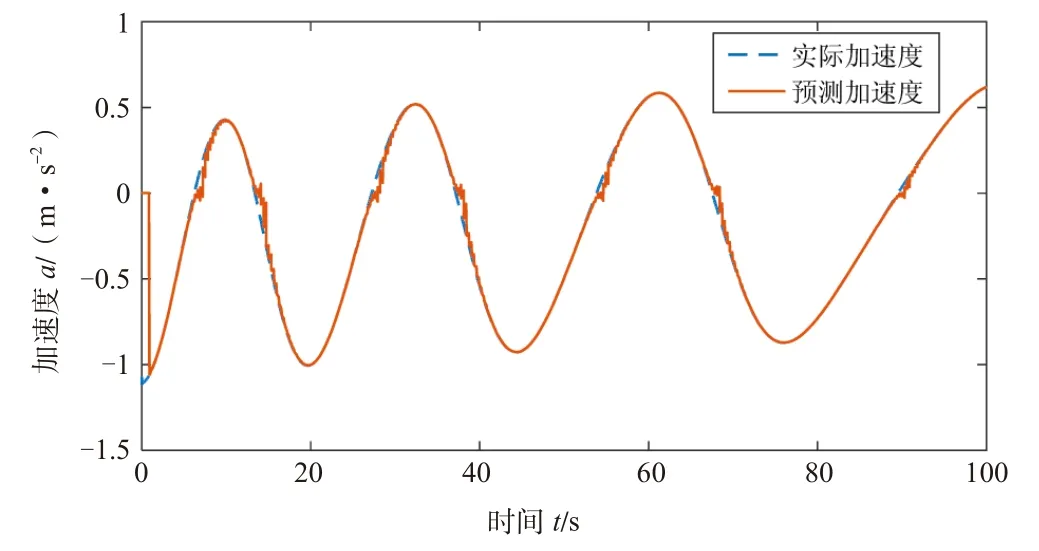
图11 预测基准加速度曲线
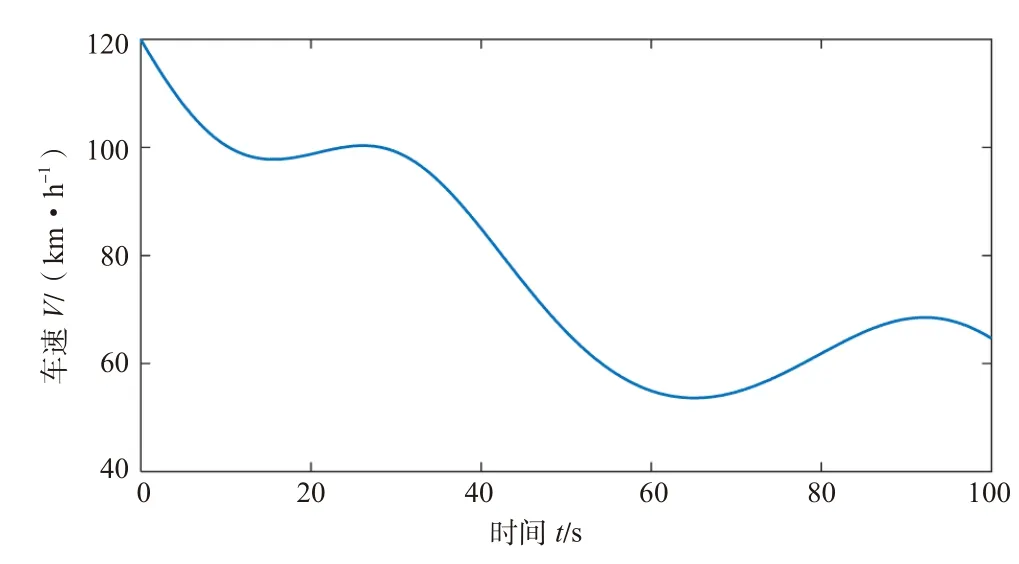
图12 车速变化曲线
4 结论
传统模式仲裁切换策略均是通过一次离线获得车速-基准加速度关系,未考虑外界阻力变化对基准加速度曲线的影响。因此,本研究设计了基于加权最小二乘的电动车ACC模式仲裁切换策略。首先分析了自适应巡航下的整车纵向动力学模型,得到驱动力、制动力与行驶阻力的关系。进一步得出在滑行状态下,车速与加速度的关系,利用最小二乘拟合法辨识关系式参数。介绍了传统最小二乘拟合法,并对该算法加以优化:引入遗忘因子加权,对历史数据折旧处理,满足对时变数据的跟随;基于历史数据的递推计算,减少运算量满足车辆控制实时性的要求。
最后通过Matlab/Simulink与Carsim联合仿真,验证算法在外界的风速干扰和坡度干扰下预测基准加速度的准确性。结果显示,稳态时预测基准加速度准确性较高;在外界环境突变后,算法瞬间会出现较大误差。几个工作周期后,能较快适应新的环境参数。
(References):
[1] 严伟. 仿驾驶员速度跟随行为的自适应巡航控制算法研究[D]. 长春:吉林大学,2016. YAN Wei. Study on Adaptive Cruise Control Algorithms Imitating Car-following Behaviors of Drivers[D]. Changchun:Jilin University,2016. (in Chinese)
[2] 李朋,魏民祥,侯晓利. 自适应巡航控制系统的建模与联合仿真[J]. 汽车工程,2012,34(7):622-626. LI Peng,WEI Minxiang,HOU Xiaoli. Modeling and Co-simulation of Adaptive Cruise Control[J]. Automotive Engineering,2012,34(7):622-626. (in Chinese)
[3] 余志生. 汽车理论[M]. 北京:机械工业出版社,2009. YU Zhisheng. Automobile Theory[M]. Beijing:China Machine Press,2009. (in Chinese)
[4] 陈桂秀. 用程序求解最小二乘拟合多项式的系数 [J]. 青海师范大学学报(自然科学版),2010,26 (3):14-17. CHEN Guixiu. Program to Solve The Least Squares Fitting Polynomial Coefficient[J]. Journal of Qinghai Normal University (Natural Science),2010,26 (3):14-17. (in Chinese)
[5] 陈良波, 郑亚青. 基于最小二乘法的曲线拟合研究[J].无锡职业技术学院学报,2012,11 (5):52-55. CHEN Liangbo,ZHENG Yaqing. Study on Curve Fitting Based on Least Square Method[J]. Journal of Wuxi Institute of Technology,2012,11 (5):52-55. (in Chinese)
[6] 马国成. 车辆自适应巡航跟随控制技术研究[D]. 北京:北京理工大学,2014. MA Guocheng. Research on the Adaptive Cruise Control Tracking System Applied for Motor Vehicles[D]. Beijing:Beijing Institute of Technology,2014. (in Chinese)
作者介绍

责任作者:初亮(1967-),男,吉林长春人。教授,博士生导师,主要从事节能与新能源汽车方面的研究。
Tel:13134313218
E-mail:chuliang@jlu.edu.cn
Research on ACC Pattern Switching Strategy Based on Weighting Least Squares Fitting
CHU Liang,LI Tianjiao,SUN Chengwei
(State Key Laboratory of Automotive Dynamic Simulation and Control,Jilin University,Changchun 130022,China)
The traditional adaptive cruise control (ACC) pattern arbitration switching strategy might cause frequent pattern switching and inaccurate control of acceleration. Accordingly, a pattern switching strategy with real-time online fitting was designed. The relational parameters in the driving resistance model were identified by using the fitting method. The traditional algorithm for least squares fitting was improved by introducing the weighting factor to follow the time-varying data. Based on the recursive operation on historical data, the efficiency of the algorithm was improved and the requirement of real-time control was satisfied. The algorithm was verified by simulation and prediction of the baseline acceleration with the disturbances of wind speed and road slope. The results show that the baseline acceleration is more accurate in steady state and the algorithm can adapt to the new environmental parameters quickly as the external environment changes.
highway transportation;pattern arbitration switching strategy;least squares fitting algorithm;adaptive cruise control;electric vehicle

U469.72
A
10.3969/j.issn.2095-1469.2017.04.03
李天骄(1992-),吉林长春人。硕士研究生,主要从事新能源汽车自适应巡航系统研究。
2017-02-13 改稿日期:2017-03-30
国家高技术研究发展计划(863)(2012AA110903)
参考文献引用格式:
初亮,李天骄,孙成伟. 基于加权最小二乘拟合的电动车ACC模式仲裁切换策略研究[J]. 汽车工程学报,2017,7(4):253-260.
CHU Liang,LI Tianjiao,SUN Chengwei. Research on ACC Pattern Switching Strategy Based on Weighting Least Squares Fitting[J]. Chinese Journal of Automotive Engineering,2017,7(4):253-260.(in Chinese)
Tel:18243189214
E-mail:ccqwetqwe@163.com
猜你喜欢
昆明医科大学学报(2021年12期)2021-12-30
英语文摘(2020年10期)2020-11-26
好日子(下旬)(2020年6期)2020-08-04
兵器装备工程学报(2020年6期)2020-07-07
作文周刊·小学一年级版(2020年8期)2020-05-11
汽车维修与保养(2019年1期)2019-05-05
汽车电器(2018年12期)2019-01-04
劳动保护(2018年8期)2018-09-12
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10