船舶液舱液位实时监控技术研究
2017-08-17 11:03田浩,胡义
中国修船 2017年4期
田 浩,胡 义
(武汉理工大学 能源与动力工程学院,湖北 武汉 430063)
船舶液舱液位实时监控技术研究
田 浩,胡 义
(武汉理工大学 能源与动力工程学院,湖北 武汉 430063)
针对船舶液舱自由液面问题,文章介绍了自由液面产生的原因,并分析了各种情况下产生的自由液面对船舶稳性造成的影响。采用SerialPort串口通过RS485接口标准设计出一套符合ModbusRTU通信协议的船舶液舱液位实时监测方案。利用RS485接口的远距离传输特性,传感器可以充分覆盖大型船舶的各个液舱,实现全船监测。最后在实验条件下验证了方案的可行性。得到的监测数据可通过程序准确计算液舱装载容积、自由液面和船舶稳性,给船员配积载提供有力的判断帮助。
船舶液舱;自由液面;稳性;液位;实时监测
液货船装载仪相对于散货船及集装箱船而言,后者具有较多的研究和较稳定的成果,液货船方面却一直研究量少,成果也不尽人意。大量自由液面是液货船和干货船最为不同的地方,并且船舶稳性会因为这些自由液面发生改变。由文献[1]知自由液面导致的沉船事件并不少见,例如震惊全国的大舜号海难在事后调查中发现,自由液面是大舜号沉没的一个重大因素。自由液面对船舶稳性的影响是随载况实时变化的[2],所以液货船稳性实时计算关键问题就是解决每个实时载况下的自由液面修正。要研究实时载况下的自由液面,实时液位信息是必不可少的数据,因此实时获取的液舱液位数据对液货船等含有大量液舱的船舶具有重大意义。
随着科学技术的发展,特别是电子技术方面的进步,自动化装置在船舶的多个方面得到了应用,液位测量作为船舶自动化的一部分,也必须不断升级改进才能满足现代船舶对液位测量的要求。液位测量在很长一段时间因为RS232技术的成熟而将其作为数据的通信接口,但该接口传输距离很有限,实际的最大传输距离才为15 m左右,显然这个距离对大型船舶来说太短。本文希望通过采用其他接口代替RS232,并通过相关技术得到更远的数据传输距离,从而能充分满足大型船舶的要求。
1 自由液面对稳性影响
自由液面是指船舶液舱内没装满时与水面平行的可以自由流动的液面。由文献[3]知自由液面几乎存在所有的船上,且应充分重视。由于该液面在船舶倾斜时会随着船舶的倾斜而往船舶的倾斜侧自由流动,故称自由液面。当船舶发生横倾后由图1可知,液舱中的液体会产生流动,其自由表面由LS变为L'S',重心由G变为G'。根据合力矩定理和平行力移动原理,船舶的总重心也会发生相应的变化[4]。即船舶在使稳性力矩减小的横倾力矩作用下,升高了船舶重心,降低了船舶稳性。因此只要存在自由液面,便一定会减小船舶稳性。
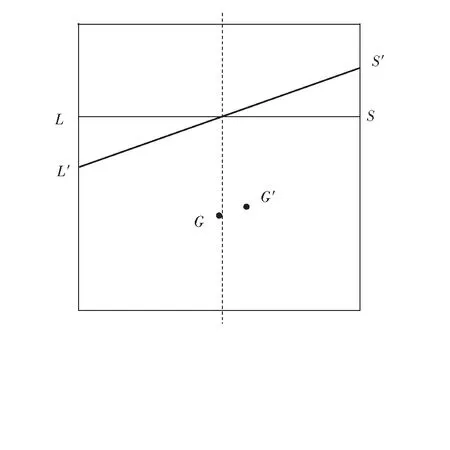
图1 自由液面对船舶初稳性的影响
液舱中的液体过多或者过少时,倾角对自由液面面积的影响变大,所以船舶倾角对液舱中自由液面面积惯性矩的影响也变大。在装有连通阀的不同液舱之间倾角对自由液面惯性矩的影响也比较复杂,以下2条结论可供船员在航行中应用。
1)舱内液体过少时,船舶在较小的倾斜角时就会因为液体产生流动而露出一个舱底角,此刻达到自由液面惯性矩极大值。在随后的情况下,液舱自由液面面积会跟着倾斜角的变大而变小,自由液面面积惯性矩也会随着减小。自由液面面积在其法线与液舱对角线平行时为最小值情况,其面积惯性矩也为最小情况。当倾角继续加大时,自由液面面积加大,其惯性矩也随着加大。
此情况的面积惯性矩最大值发生在较小倾角时,即在较小倾角时对船舶稳性的影响最大。图2中,当h>H/2,且α>θ>β时,其中H为液舱高度,h为液舱中的空档高度,α为未发生倾斜时液面中点到舱顶角的直线与液面的夹角,β为未发生倾斜时液面中点到舱底角的直线与液面夹角的内错角,θ为船舶横倾角,船舶液舱中自由液面倾斜侧的力矩为:

(1)
式中:ρ为液体的密度,g/cm3;Vd为液舱内的体积,m3;B为液舱最大宽度,m;d为液舱中液体深度,m。
2)舱内液体过多时,船舶在较小倾角情况下即可因为液体的流动使一个舱顶角淹没,此时达到自由液面惯性矩极大值。之后的情况与液舱中液体过少时的情况一样。图2中,当h

(2)
式中:Vh为液舱内的空档体积,m3。

图2 自由液面示意图
2 实时自由液面修正
船舶装载仪在计算实时稳性时,第一步应获取各个液舱实时液位数据,然后再根据固定载荷情况对实时载况进行计算。计算实时载况之后,再进行当前载况浮态以及稳性的计算。船舶稳性曲线被自由液面影响部分的修正计算,也要以各个液舱液位实时数据为依据。
如何准确得到各个液舱在实时载况下真实的装载情况是实时计算自由液面修正的重点。在船舶装载仪计算实时稳性的时候,首先需要由液位传感器输出各个液舱实时液位数据,由于各个舱室的形状等物理几何条件为已知,故可以计算出各个液舱实时装载率。最后再根据修正公式计算出实时自由液面修正值[5]。进行实时计算自由液面修正的流程如图3。

图3 实时自由液面修正流程图
3 实时液位采集
自由液面对船舶稳性具有重要影响,在液货船上尤为明显,实时准确获取各液舱中的液位显得格外重要。文献[6]阐述了自动化监控技术在船舶系统中的重要作用,不但能实现船舶的安全运行,还可以推动船舶行业在我国更好的发展。本文在Windows环境下使用程序设计语言VB.net,收集从传感器测得的实时液位信号实现对液舱液位的实时监控。
3.1 SerialPort类串口连接
随着计算机在越来越多的领域使用,更多的硬件需要采用串口技术与计算机相连,串口的开发也更加普遍。VB6.0软件中编写关于串口通信的程序,通常采用Microsoft Communication Control(简称MSComm)的通信控件来实现[7]。但在微软VisualStudio不断升级换代的现在,MSComm控件没有被微软加进VisualStudio.Net控件库中去,而是在.NETFramework2.0类库包含了SerialPort类。
由文献[8]知,MSComm过于复杂,操作不便,系统运行安全系数不高,串行端口无法共享,可靠性和安全性不能得到保证;而SerialPort类具有丰富的特性和串口通信相关的事件,它提供了多种操作的串口,编程时非常方便,且易于部署。本文使用VB.net语言中的SerialPort类实现上位机和下位机的串口通信。
3.2 RS485远距离通信实现
RS485是由RS232发展而来的接口标准,能用于组建点到多点或者多点到多点的网络,解决了RS232接口标准的联网问题[9]。由于RS232接口使用的是非差分电路,即能点对点数据通信,并且因为线路共用接电线,使其通信距离较短,通常仅用于设备与计算机的短距通信。而RS485使用的是差分平衡电路,传输距离可达1 200 m,还可以通过添加中继器进一步增加通信距离,且支持多点通信。由文献[10]知在某些情况下RS485总线还可以代替现场总线作为通信方式。
3.3 ModbusRTU数据准确保证
Modicon公司于1979年开发出Modbus通信协议。该协议是第一个真正在工业现场使用的总线协议,使用的工作方式为主从问答。作为一种公认的通用工业标准,该协议广泛应用在测控仪表及自动化控制器等方面。Modbus协议已成为我国工业自动化网络协议规范的国家标准之一[11]。
Modbus协议仅需要用软件型式来实现协议及堆栈,而不需要特定的通信模块。可通过包括光导纤维、无线通信、双绞线、微波及以太网等任何传输媒介进行通信,因此很容易建立Modbus连接。
由于ModbusRTU采用的工作方式为主从模式,所以当一个信息由主机设备发出时,可得到一个响应从相应的从机设备返回。若一个信息由一台从机设备接收到,相应的主机设备便会得到由该从机发送的一个响应信息。但不能由网络上的从设备发起通信,只有当主设备对它通信时,从设备才能回答。
当网络上的主机发送通信命令时,地址码对应的从机会接收主机发出的通信命令,并根据发出的通信命令的功能码与相关要求读取该通信命令的信息。从机进行对该信息的CRC校验,在校验正确之后,从机返送给主机此次通信的执行结果,见表1。

表1 ModbusRTU信息帧格式
ModbusRTU的查询响应周期如图4所示。

图4 响应周期查询
3.4 液位采集设计
在硬件设计方面,由于一般上位机PC没有特定针对RS485的接口,因此把传感器中的数据读入到上位机PC时,需要把传感器的接口转换成上位机PC能接收的接口。为了进一步增加适应性,此次设计把RS485接口转换为常见的USB接口,本次设计直接采用UT-885转换器。使用的液位传感器输出信号及接线端子引脚分配如表2。
按如图5进行接线,效果如图6。

表2 输出信号及接线端子引脚分配

图5 RS485输出数字信号接线图

图6 转换器实物接线
此次设计主要用来实时读取传感器的数据,故功能码主要使用03,协议格式说明如表3。

表3 协议格式说明
在软件设计方面,串口的通信流程如图7。此次设计在Windows操作系统下,使用VB.net编程软件进行软件开发设计,其主界面如图8。为增加人机交互性,此次设计数据接受按钮增加为2个,一个按钮为“发送”,此按钮为发送单个访问传感器信息,仅得到当前一个液位信息;另一个按钮为“打开timer”,此按钮可以根据操作需求获取定时间间隔的实时液位数据。

图7 串口通信流程
3.5 实验验证
在实验条件下测得结果图8。经过多次测试了解同一个串口不能同时被多个不同的程序打开,故保持液位传感器位置不变,改由Modbus调试精灵进行通信,其结果如图9所示。因为此传感器数据输出的0~2 000对应0~5 m,所以由Modbus调试软件得到109转换成实际深度为(109/2 000)m,即0.054 5 m,与编写的软件结果保持一致。

图8 液位监测界面
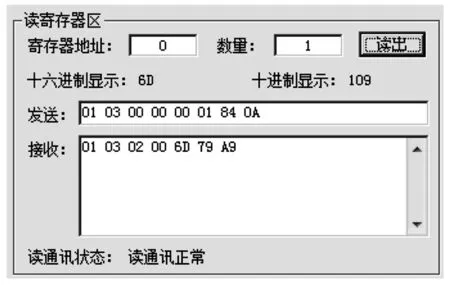
图9 Modbus调试软件所得结果
4 结束语
在船舶航行中总会出现自由液面的情况,应尽量减少同时出现的自由液面,在避免不了的情况下应根据实际情况减弱其对船舶造成的安全性影响。实验针对船舶产生自由液面时引起的船舶安全性问题,利用液位传感器对各个船舶液舱进行实时监测,掌握船舶自由液面的实时情况。利用RS485接口的远距离传输信号特性,在不加中继的情况下最远传输便可达到1 200 m的信号传输距离,可以充分覆盖大型船舶需要监测液位的舱室。海上的情况瞬息万变,实时获取的各液舱液位数据可以给船员的判断提供有力的帮助。
[1] 赵月林,张选逵.自由液面对船舶安全的影响及对策[J].大连海事大学学报,2003,29(2):34-37.
[2] 蒋璐,唐娟娟,胡以怀.液货船稳性计算及校核方法研究[J].造船技术,2015(1):20-24.
[3] Jose Luis Cercos-Pita,Gabriele Bulian,Luis Pérez-Rojas,et al.Coupled simulation of nonlinear ship motions and a free surface tank[J].Ocean Engineering,2016(3):281-287.
[4] 田佰军,杜嘉立.自由液面对船舶稳性影响的计算[J].航海技术,2003(4):26-27.
[5] 马坤,董晓霞,杨帆.舰船自由液面对稳性曲线修正的实时计算[J].中国舰船研究,2006(1):54-57.
[6] 关念,王鸿鹏.船舶机舱自动化监控系统故障自诊断技术研究[J].舰船科学技术,2016,38(8):138-140.
[7] 刘东.基于VB.net的串口通信方法设计[J].电脑知识与技术,2012,8(34):8304-8307.
[8] Fu Chuanyi,Zhan Jinmei,Chen Juntao.2011 Seventh International Conference onComputational Intelligence and Security(CIS)[C].Hainan:IEEI,2010:1471-1472.
[9] 冯子陵,俞建新.RS485总线通信协议的设计与实现[J].计算机工程,2012(20):215-218.
[10] Yulong Jin,Jiaqiang Yang.2011Second International Conference onDigital Manufacturing and Automation(ICDMA)[C].Zhangjiajie:IEEI,2011:361-363.
[11] 吕国芳,唐海龙,李进.基于ModbusRTU的串口调试软件的实现[J].计算机技术与发展,2009(9):236-238.
兴 船 报 国 创 新 超 越
打 造 精 品 做 强 主 业
Concerning the free surface problem of ship's liquid tank,the causes of the free liquid surface are described and the effects and influence from which are analyzed on the stability of the ship.A real-time ship's liquid-tank level monitoring scheme is designed with corresponding Modbus RTU communication protocol.This scheme is designed by using SerialPort serial port through RS485 interface standard with long-distance transmission characteristics,whose sensor can fully cover all tanks of large ships to achieve the whole ship monitoring.The feasibility of the scheme is verified under the experimental conditions.The obtained monitoring data can provide effective help for the crew in dealing with sotwage by calculating the volume of liquid tank,the free surface and the stability of the ship.
ship' s liquid tank;free surface;stability;liquid level;real-time monitoring
田浩(1992-),男,湖北武汉人,在读硕士研究生,研究方向为船舶自动化。
U661
10.13352/j.issn.1001-8328.2017.04.010
2017-02-28
猜你喜欢
船舶(2022年4期)2022-08-20
舰船科学技术(2022年10期)2022-06-17
海洋工程(2021年5期)2021-10-27
舰船科学技术(2021年12期)2021-03-29
船舶(2020年4期)2020-08-29
铁道学报(2019年8期)2019-10-18
中国海上油气(2019年4期)2019-08-03
科学与财富(2018年26期)2018-10-24
舰船科学技术(2018年4期)2018-05-16
中国建筑金属结构(2018年11期)2018-01-04