
基于SVM和阈值分析法的摔倒检测系统
2017-08-12 15:45曹桂涛
计算机应用与软件 2017年7期
陈 玮 周 晴 曹桂涛
1(华东师范大学教育信息技术学系 上海 200062)2(上海浦东发展银行上海分行 上海 200000)3(华东师范大学计算机科学与软件工程学院 上海 200062)
基于SVM和阈值分析法的摔倒检测系统
陈 玮1周 晴2曹桂涛3*
1(华东师范大学教育信息技术学系 上海 200062)2(上海浦东发展银行上海分行 上海 200000)3(华东师范大学计算机科学与软件工程学院 上海 200062)
随着我国人口老龄化的快速发展,老年人口呈现出高龄化、空巢化的趋势。当老年人在家中发生意外跌倒而未能及时获得救助时,会给老年人造成严重的身心伤害。针对这个问题,设计并实现老年人摔倒检测系统。 该系统以嵌入式微处理器K60核心开发板作为处理内核,加速度传感器MMA7660FC采集人体三轴加速度信息,ENC-03陀螺仪采集两轴角速度信息。通过基于支持向量机(SVM)和阈值分析法的摔倒检测算法判断是否摔倒,在摔倒时能自动地发送摔倒报警信息。实验结果表明,系统能有效地区分摔倒和其他日常生活行为,算法准确度高、实时性高。
加速度传感器 陀螺仪 支持向量机 阈值分析法 摔倒检测
0 引 言
当前我国人口老龄化、高龄化、空巢化、独居化趋势延续,针对老年人的照料和护理问题就显得日益突出。而在所有关心的问题中,其中一个关键的问题是如何预防和及时发现老人摔倒等意外事故。相关研究表明,摔倒会给高龄者的生理和心理上带来不同程度的伤害,尽管有时跌倒不会使人受伤,但是如果没有及时发现并救助,47%的跌倒者无法自己站立起来,而且这段不能移动的时间会给他们的健康带来伤害[1]。如果能及时发现老年人的摔倒并进行及时有效的救护,就会大大降低摔倒对老年人的伤害,并减轻家庭的医疗费用负担及国家的医疗资源压力。目前,研究开发的摔倒检测系统方面的技术有以下几种:① 基于视频图像的摔倒检测,基于视频图像分析,虽然这种技术的准确度高,但是这种检测设备成本花费高,适用于范围小的居家环境,容易牵扯隐私问题[2]; ② 基于手机传感器的摔倒检测,基于手机自带加速度传感器和方向传感器,虽然携带方便,但是需要经常充电,才能够满足长时间的摔倒检测[3];③ 基于声频信号的摔倒检测,只适用于安静、范围小的居家环境,受外界噪声影响明显,如果地板铺上了毛毯,那么将不容易辨别声频信号的差别,通用性弱[4];④ 基于可穿戴式传感器的摔倒检测,通过传感器获取人体运动信息数据[5-6],该技术不易对使用者的日常生活造成干扰,实时性和准确度高,已经成为目前研究的趋势。通常使用的传感器是三轴加速度传感器,例如安徽理工大学的学者提出的基于三轴加速度传感器的老人摔倒检测[7]和安徽工业大学的学者提出的基于MMA7660加速度传感器的老人跌倒检测装置[8]都仅是选用加速度传感器获取摔倒特征数据,存在容易将坐下、蹲下、上下楼等这系列动作剧烈的日常活动误判为摔倒的问题。最近“一种六轴运动处理组件的老人跌倒检测装置”技术被提出,兰州理工大学的学者运用一种新型的 MEMS 传感器 MPU6050,它整合了三轴陀螺仪和三轴加速器能同时对三轴加速度及三轴角速度进行检测[9]。然而没有将人体摔倒过程中的身体姿态的改变过程作为摔倒判断特征,容易造成将人快速躺下等日常活动行为误判为摔倒的情况。北京工业大学的学者提出了基于三轴加速度传感器及陀螺仪的老年人摔倒识别,其中基于阈值分析法的摔倒识别算法将特定部位的合加速度和竖轴偏离的合偏转角作为摔倒识别的阈值[10]。但是人体运动行为过程中具有一定程度的复杂性与随机性,仅仅是采取单一的加速度值作为判断人体首次摔倒撞击和撞击结束的运动行为阈值,容易造成误判,而且没有体现人体摔倒过程中角速度产生峰值这个特点。
针对上述问题,大多数误判样本中的瞬时线速度与摔倒样本相当,但是其角速度的峰值点存在较大的差值。所以本文进行了基于三轴加速传感器和两轴角速度传感器的摔倒检测系统的硬件设计,选取人体质量分布中占据大比例且活动频繁的上躯干腰间部位作为设备佩戴位置,尽可能地减少对用户平日生活活动的干扰。并提出了支持向量机(SVM)和阈值分析法的摔倒检测算法,将人体三轴合加速度、两轴合角速度和躯干偏离竖直方向的倾斜角作为摔倒行为判断阈值。实验结果显示,该检测系统实时性好、检测精度高,能准确地区分摔倒和其他日常生活行为,当检测到摔倒时,会自动发送摔倒报警信息,并且一定程度上成功避免了上述的误判情况。
1 摔倒检测系统设计
1.1 系统结构
摔倒检测系统的硬件由三轴加速度值采集模块、两轴角速度值采集模块、数据处理模块、无线数据传输模块组成,三轴加速度值采集模块通过加速度传感器获取人体上躯干部位的绕X、Y、Z轴的加速度变化数据,两轴角速度值采集模块通过角速度传感器获取以人体竖直方向为轴绕前后左右的两轴的角速度变化数据。数据处理模块将采集到的加角速度值进行数据解析,结合摔倒检测算法判断是否摔倒,如果判断为摔倒则通过无线数据传输模块将摔倒报警信息发送到附近医院和家属的手机上,系统结构图如图1所示。
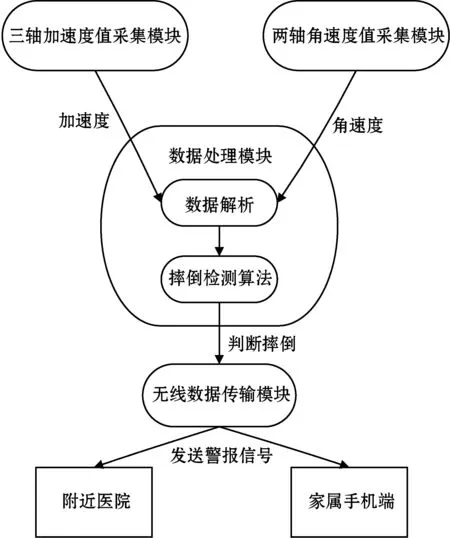
图1 系统结构图
根据图1的系统结构,搭建出硬件开发平台如图2所示,开发出的可穿戴式摔倒检测系统信息采集端佩戴在人体腰部如图3所示。

图2 硬件开发平台

图3 摔倒检测系统信息采集端
1.2 三轴加速度值采集模块
本文采用三轴加速度传感器MMA7660FC采集人体运动状态下的三轴加速度,检测出倾斜、运动、定位、振动和撞击力下产生的变化,输出人在运动情况下产生的X、Y、Z三轴加速度信息。MMA7660FC是通过12C数字输出结果的,其输出的格式是X、Y、Z三轴各输出一个6位数字,表示当前测量得到的加速度值。
1.3 两轴角速度值采集模块
为采集两轴角速度值的信息和变化情况,本文选择ENC-03陀螺仪,输出模拟电压信号。电压值与角速度值成正比关系,静止时ENC-03RC OUT引脚输出电压是1.35 V,单位角加速度对应的电压变化:0.67 mv/deg/sec,陀螺仪每秒向正方向偏转1度,则输出电压会加上0.67 mV,每秒向负方向偏离1度,则输出电压需减掉0.67 mV。所以在计算陀螺仪数据的时候,利用下列公式来计算角速度:
(1)
其中V代表陀螺仪的输出电压,V0表示陀螺仪静止时输出电压1.35 V,计算得出的角速度单位是deg/s。
1.4 无线数据传输模块
为了实现报警信息的传输和嵌入式设备通过UART 接口与WIFI网络中的设备进行数据交换。本文选用ST-MW-08S芯片,其UART接口最高频率达到115 200 B,并且有可编写程序来操控的透明串口,用于数据传输;有简单数据传输模式,即UDP 数据传输模式;也有可靠数据传输模式,即TCP 服务器模式和TCP 客户端模式,100%保证数据在网络中的可靠传输,无线数据传输模块是通过UART协议来发送警告信号。
1.5 数据处理模块
数据处理模块采用的主控模块是Freescale的K60开发板。K60开发板搭载ARM Cortex-M4处理器,32位ARM Cortex-M4内核,2个I2C总线接口等多种串口,外设包含了8-12位ADC单元,USART接口等多种总线接口,还有标准的JTAG测试/调试接口。陀螺仪和三轴加速度传感器分别通过ADC接口和I2C接口与微处理器通信。实现数据处理模块的软件环境是IAR Embedded Workbench for ARM 6.30,在该开发环境下,编写程序用于加速度传感器MMA7660FC、ENC-03陀螺仪采集数据的解析、校准,以及实现摔倒检测算法和摔倒报警信息发送程序。然后通过JTAG仿真器J-Link下载到K60开发板,识别人体摔倒和发送摔倒报警信号,图4给出了K60开发板同无线数据传输模块、各个传感器的电路连接图[11]。
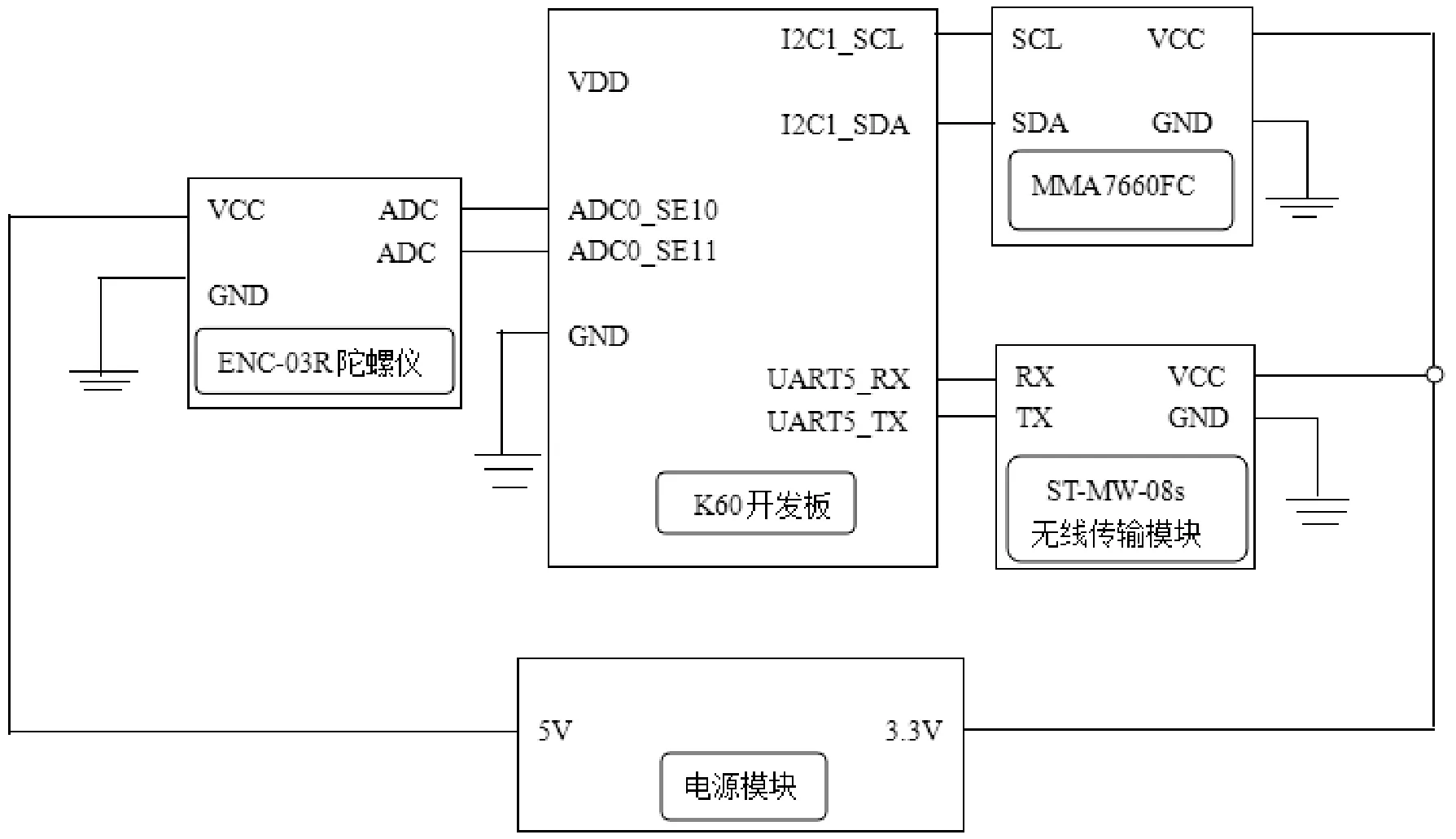
图4 电路连接图
2 摔倒检测算法设计
本文的摔倒检测算法如图5所示。
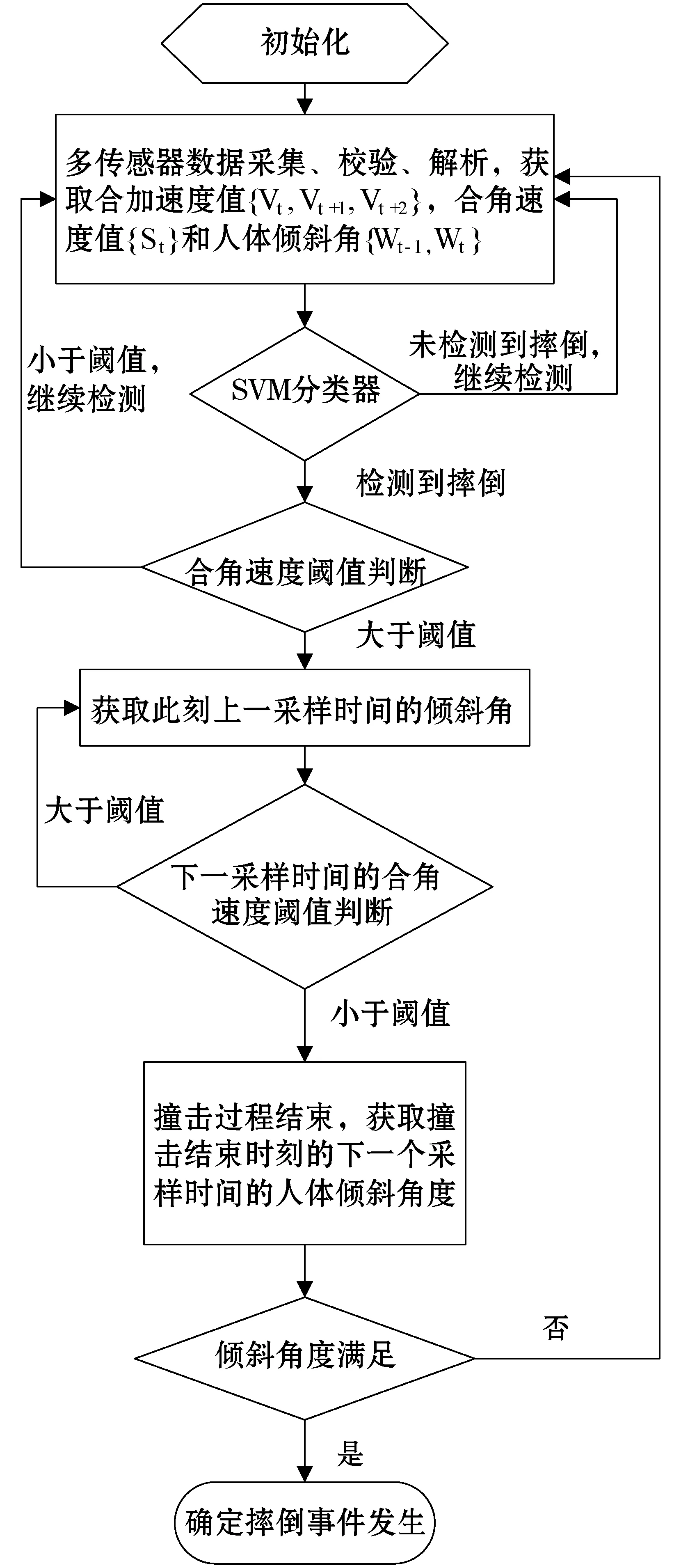
图5 摔倒检测算法流程
具体的步骤如下:
(1) 系统进行初始化,读取当前时刻t的人体三轴加速度值、两轴角速度值,并计算这些时刻的合加速度值Vt、合角速度值St和t-1、t时刻的人体倾斜角度Wt-1、Wt。定义两个数据存储空间F1和F2,F1以滑动窗口的方式存储从当前时刻t开始的连续三个采样时间的合加速度值,F2以滑动窗口方式存储当前时刻t的合角速度值和t-1、t时刻的倾斜角度,即F1={Vt,Vt+1,Vt+2},F2={St,Wt-1,Wt}。当采集到新的数据时,滑动窗口向前移动,释放最早的数据存储空间,存储新的数据。
(2) 将当前的存储数据空间F1作为特征样本,通过支持向量机检测该时刻是否发生摔倒事件,如果判断为摔倒行为类别,则进入下一个步骤,如果判断为其他平日活动行为类别,则返回步骤(1)。
(3) 读取当前的存储数据空间F2的合角速度值St,同摔倒合角速度阈值进行比较,如果大于阈值,则进入下一个步骤,否则返回步骤(1)。
(4) 获取当前时刻t1上一个采样时间的人体倾斜角度Wt1-1。
(5) 继续检测当前时刻t1下一个采样时间的合角速度值,即是St1+1,然后和摔倒合角速度阈值进行比较,用以判断人体是否还处于撞击状态,如果St1+1大于摔倒合角速度阈值,说明撞击还未结束,继续步骤(5)检测,否则进入下一个步骤。
(6) 如果撞击结束,记录首次撞击结束的时刻Z,信息获取过程继续,继续读取Z时刻下一个采样时间的人体倾斜角度Wz+1。
(7) 假如Wz+1大于人体摔倒倾斜角度阈值而且Wt1-1小于或者等于人体摔倒倾斜角度阈值,那么判断摔倒事件发生,否则返回步骤(1)继续检测。
2.1 基于支持向量机的摔倒检测
本文通过支持向量机(SVM)把人体平日活动的行为过程与人体摔倒过程区分出来[12]:运用支持向量机构造分类器将训练样本集分为如下HF和HS两类互不相交的集合,其中HF∩HS=φ,其中φ为空集。
HF:摔倒行为类别数据样本集,由150次摔倒行为过程(包括向前摔倒、向后摔倒、向左摔倒、向右摔倒、行走过程中摔倒)数据样本组合而成。
HS:其他平日活动行为类别数据样本集,由200次平日活动过程(包括行走、跑步、蹲下、坐下、下楼)数据样本组合而成。
区分摔倒行为过程与其他平日活动行为过程的特征之一是人体在摔倒的过程中撞击低水平平面或者地面产生的加速度峰值。因而首先获取摔倒行为类别数据样本集HF里各个数据样本的三轴加速度,然后计算出合加速度,计算公式如下,其中a、b、c分别为X、Y、Z轴加速度。
(2)
如果人失重后跌倒在地面上受到的冲击是振动型的,那么可能会出现多个合加速度峰值,摔倒过程可能历经1~3秒钟。所以然后从各个数据样本的合加速度筛选中合加速度峰值Vt1,并取得峰值点的连续三个时间段的合加速度值{Vt1,Vt1+1,Vt1+2},将其记录为Hb。接着计算其他平日活动行为类别数据样本集的合加速度,然后从各个数据样本的合加速度筛选中合加速度峰值Vt2,并取得峰值点的连续三个时间段的合加速度值{Vt2,Vt2+1,Vt2+2},将其记录为Hc,因为是分别从两类样本HF和HS筛选出Hb和Hc,所以它们两者之间是独立的。假设Hb和Hc是线性可分的,那么可以通过SVM方法确定出最优分类界面[13],但是如果这两类数据是非线性可分的,首先将原始空间数据映射到特征空间,然后选择合理的核函数之一,本文选择多项式核函数。
2.2 基于两轴合角速度阈值的摔到检测
在区分摔倒和平日活动过程中线加速度的变化特征,运用基于支持向量机的方法基本准确,但是人在快速蹲下、坐下等过程中,合加速度峰值可能接近甚至等同于摔倒的合加速度峰值,因此仅是基于支持向量机方法的摔倒判定是不够的。摔倒情形下加速度和角速度的峰值振幅比较明显,实验表明蹲下、坐下等一系列平日活动合角速度最大值也不会超过56 deg/s,而跌倒时合角速度最大值一般都超过62 deg/s。摔倒的时候人体胸腰部位偏离与地面垂直方向的俯仰角、侧倾角角速度(Sx,Sy)的峰值振幅发生明显变化。所以在支持向量机方法的基础上增加阈值分析方法,取两轴合角速度作为判断摔倒的阈值,合角速度公式如下:
(3)
首先依据摔倒行为类别数据样本集HF计算和筛选出合角速度峰值Smax,并记录为集合Lmax,给定样本数据集合为{Qi}。接着根据其他平日活动行为类别数据样本集HS计算和筛选出合角速度峰值Rmax,并记录为集合Pmax,假设集合Lmax和集合Pmax线性可分,那么可以通过SVM方法确定出最优分类界面,集合Lmax类中元素和集合Pmax类中的元素皆为合角速度值,计算出最优分类超平面为:Q=62 deg/s,即人体摔倒合角速度阈值的取值是62 deg/s。
2.3 基于人体倾斜角度阈值的摔倒检测
在集合Lmax和集合Pmax非线性可分的情况,即人在进行快速行走、跑步、快速下楼等剧烈活动的过程,合角速度峰值有可能等同于或甚至超过人体摔倒过程中合角速度峰值,而且也没有体现人体在摔倒过程中倾斜角度比较大的特点[13]。所以在基于支持向量机和人体合角速度阈值判断的摔倒识别方法基础上,加上人体倾斜角度(身体躯干相对于地面垂直方向的角度)阈值判断方法,它是检测摔倒方面的一项重要依据,计算公式如下:
(4)
其中a(t)、b(t)、c(t)是t时刻的X、Y、Z轴上的加速度值,G为重力加速度。
如摔倒合角速度阈值的计算方法一样,计算出人体摔倒倾斜角度阈值是60度。
3 实 验
为了验证摔倒检测系统和算法的准确性和可靠性,本次研究请了五名青年在日常生活模拟的情境内做了前向行走、跑步、坐下、蹲下、快速上楼和下楼、向前摔倒、向右摔倒、左侧摔倒、右侧摔倒、行走过程中摔倒等一系列实际应用场景的动作检测。为了验证摔倒检测算法的准确性,本文选择了精确度指标[14],用来检验摔到和非摔倒动作的识别率,最后的计算结果都达到100%。出于安全考虑,本实验未请老年人参与实验。
3.1 摔倒相似动作检测
坐下、蹲下这些日常动作和摔倒动作类似,以蹲下活动场景为例,图6是蹲下过程中传感器获取的数据信息结果图,其中采样频率是每秒5个样本。为了更好地显示动作变化特征,选取时间长度为10秒的采样数据,加速度值单位是G,角速度值的单位是deg/s。从图中可以看出,当人蹲下的时候,会导致人体线加速度曲线振幅,传感器数据发生明显变化,有时候在蹲下的过程中瞬间的合加速度几乎属于摔倒过程的合加速度数据类别,即使蹲下动作场景能顺利地进行到本文提出的摔倒检测算法里的步骤(3)。但从图中可以看出蹲下的过程中X、Y轴的角速度峰值的绝对值都不超过70 deg/s,所以当进行到算法中步骤(3),判断此场景的合角速度不超过摔倒合角度阈值62 deg/s,返回算法步骤(1),无法检测为摔倒事件。这个蹲下行为过程说明了摔倒检测算法的准确性。
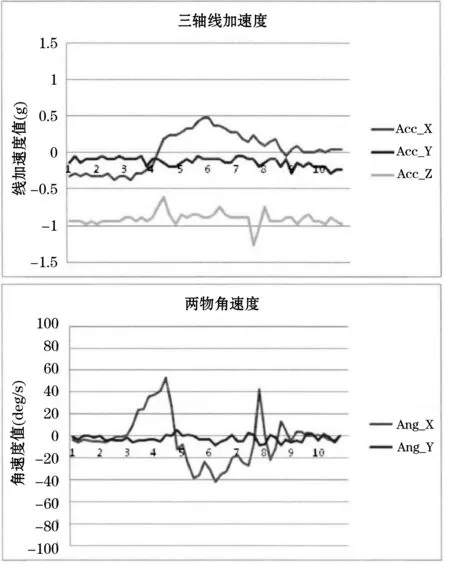
图6 蹲下实验结果图
3.2 快速动作检测
快速下楼、快速向前行走、跑步都是平日活动场景,以快速下楼场景为例,图7是快速下楼过程中传感器数据的变化图。快速下楼这种剧烈运动的合加速度、合角速度有可能超过摔倒时的线加角速度。从获取的信息数据图可以看出,合加速度峰值属于摔倒过程的合加速度数据类别,合角速度峰值是63.63 deg/s超过了本文算法设定的合角速度阈值62 deg/s,即使快速下楼的动作场景能顺利地进行到本文提出的摔倒检测算法里的步骤(6),但是计算得到的身体躯干倾斜角不满足摔倒行为的倾斜角判断标准,所以无法判断为摔倒事件。这个快速下楼的行为过程也说明了摔倒检测算法的准确性。
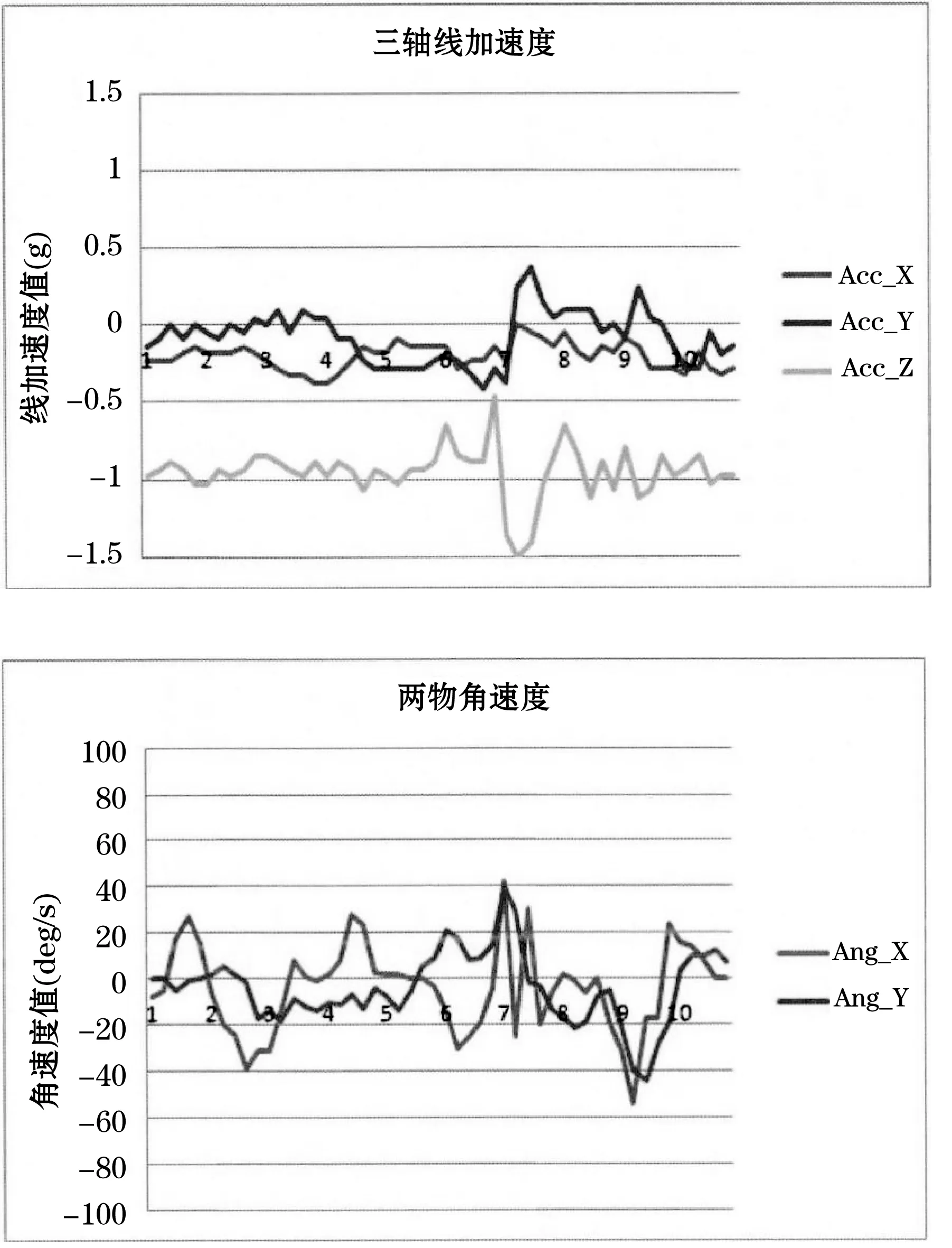
图7 快速下楼实验结果图
3.3 不同方向摔倒检测
向前摔倒、向后摔倒、左侧摔倒、右侧摔倒、行走过程中前向摔倒都是摔倒场景,以行走过程中前向摔倒为例,图8是人行走过程中前向摔倒时的传感器获取数据信息结果图。根据上述摔倒检测算法,行走过程摔倒的合加速度峰值点的连续三个采样时间段的合加速度值属于基于支持向量机方法划分出的摔倒特征样本。合角速度峰值超过算法设定的摔倒合角速度阈值,冲击结束后人体倾斜角度等于76度,超过摔倒检测算法设置的人体摔倒倾斜角度阈值60度,故系统判断为摔倒事件发生,并发出警报信号。
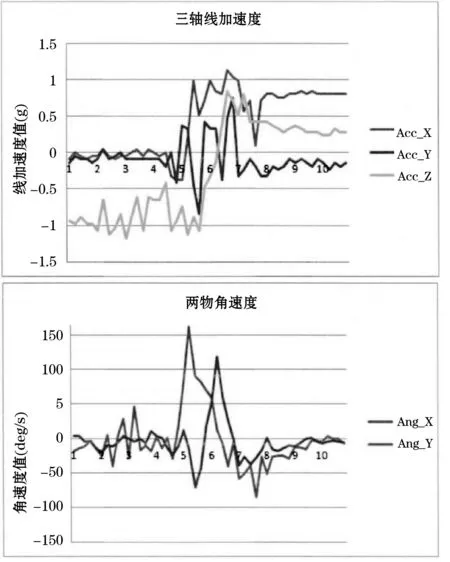
图8 行走过程前向摔倒实验结果图
4 结 语
本文进行了基于三轴加速传感器和两轴角速度传感器的摔倒检测系统的硬件设计,并设计与实现支持向量机(SVM)和阈值分析法的摔倒检测算法。对人体日常行为和向前摔倒、向后摔倒、向左摔倒、向右摔倒、行走过程中摔倒等一系列活动场景进行实验检测。实验结果表明,该系统能准确地区分摔倒和其他日常生活行为。当检测到摔倒时,系统自动发送摔倒报警信息,并且一定程度上避免了引言中提到的误判情况,证明了本摔倒检测系统可靠性高、算法准确度高。此系统适用于独居老人,它对于应对独居老人数量及其日常护理需求日益增多的形势具有重要的现实意义。
[1] 李婷.养老院老人跌倒相关知识认知的调查研究[D].沈阳:中国医科大学,2013.
[2] Vaidehi V, Ganapathy K, Mohan K, et al. Video based automatic fall detection in indoor environment[C]// International Conference on Recent Trends in Information Technology. IEEE, 2011:1016-1020.
[3] Cheng W C, Jhan D M. Triaxial accelerometer-based fall detection method using a self-constructing cascade-adaBoost-svm classifier[J]. Biomedical & Health Informatics IEEE Journal of, 2013, 17(2):411-419.
[4] Zigel Y, Litvak D, Gannot I. A method for automatic fall detection of elderly people using floor vibrations and sound-proof of concept on human mimicking doll falls[J]. IEEE Transactions on Biomedical Engineering, 2009, 56(12):2858-2867.
[5] Chen J, Kwong K, Chang D, et al. Wearable sensors for reliable fall detection[C]// Engineering in Medicine and Biology Society, 2005. Ieee-Embs 2005. International Conference of the. IEEE, 2005:3551-3554.
[6] Maglogiannis I, Ioannou C, Tsanakas P. Fall detection and activity identification using wearable and hand-held devices[J]. Integrated Computer Aided Engineering, 2016, 23(2):161-172.
[7] 崔英辉,詹林. 基于三轴加速度传感器的老人摔倒检测[J]. 现代电子技术,2013,36(3):130-132.
[8] 章小兵,祝寅. 基于MMA7660加速度传感器的老人跌倒检测装置[J]. 中国新通信,2013(1):71-72.
[9] 李战明,王晓萌. 基于新型MEMS传感器的老年人跌倒检测系统设计[J]. 工业仪表与自动化装置,2013(4):52-55.
[10] 吴天昊.基于3轴加速度传感器及陀螺仪的老年人摔倒识别[D].北京工业大学,2013.
[11] 周晴.人体运动检测系统设计与摔倒预测方法研究[D].华东师范大学,2014.
[12] Marseguerra M. Early Detection of gradual concept drifts by text categorization and support vector machine techniques: the trio algorithm[J]. Reliability Engineering & System Safety, 2014, 129:1-9.
[13] 佟丽娜. 基于力学量信息获取系统的人体摔倒过程识别方法研究[D].中国科学技术大学,2011.
[14] Noury N, Fleury A, Rumeau P, et al. Fall detection - principles and methods[C]// Conference: International Conference of the IEEE Engineering in Medicine & Biology Society IEEE Engineering in Medicine & Biology Society Conference. 2007:1663-1666.
FALL DETECTION SYSTEM BASED ON SVM AND THRESHOLD ANALYSIS
Chen Wei1Zhou Qing2Cao Guitao3*
1(DepartmentofEducationInformationTechnology,EastChinaNormalUniversity,Shanghai200062,China)2(ShanghaiBranch,ShanghaiPudongDevelopmentBank,Shanghai200000,China)3(SchoolofComputerScienceandSoftwareEngineering,EastChinaNormalUniversity,Shanghai200062,China)
With the rapid development of aging population, China’s population gradually shows the trend of aging and empty nest phenomenon. Once if the aged fall to the ground, they haven’t been discovered soon enough and take reasonable measures immediately; it would bring serious physical and psychological harm to them. In order to solve this problem, we design and implement the fall detection system for the elderly. The system uses the embedded microprocessor K60 core development board as the processing core, the accelerometer MMA7660FC collects the three-axis acceleration information of human body, and the ENC-03 gyroscope gathers the angular velocity information of the two axes. A fall detection algorithm based on SVM and threshold analysis is used to judge whether the old man falls down or not, and it can automatically send the falling alarm information when falling. Experimental results show that the system can effectively distinguish between falls and other daily life behaviour. The algorithm has high accuracy and high real-time performance.
Accelerometer Gyroscope Support vector machine Threshold analysis Fall detection
2016-07-16。国家重点基础研究发展计划项目(2011CB707104)。陈玮,硕士生,主研领域:嵌入式系统设计和模式识别。周晴,硕士生。曹桂涛,副教授。
TP391.4
A
10.3969/j.issn.1000-386x.2017.07.034
猜你喜欢
少先队活动(2022年9期)2022-11-23
成都信息工程大学学报(2022年4期)2022-11-18
中国临床医学影像杂志(2022年6期)2022-07-26
当代水产(2022年6期)2022-06-29
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
导航与控制(2019年2期)2019-06-12
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
中学课程辅导·教师通讯(2018年10期)2018-09-04
