基于Simmechanics的汽车雨刷器运动仿真研究
2017-08-09 01:34:59金映丽马礼鹏
网络安全与数据管理 2017年13期
金映丽,马礼鹏
(沈阳工业大学 机械工程学院,辽宁 沈阳 110870)
基于Simmechanics的汽车雨刷器运动仿真研究
金映丽,马礼鹏
(沈阳工业大学 机械工程学院,辽宁 沈阳 110870)
为了提高汽车雨刷器运动规律的设计水平和效率,利用MATLAB的动态仿真模块集Simmechanics建立了汽车雨刷器运动分析的仿真模型,阐述了这种建模方法与仿真的实现过程。仿真结果表明该方法能高效、准确地得到雨刷器的运动参数,能为雨刷器的尺寸选型、结构优化设计提供数据支持。
MATLAB;Simmechanics;雨刷器;运动仿真
0 引言
随着世界汽车工业的迅速发展,雨刷器的用途也越来越广泛,但是刮除挡风玻璃上的水渍与灰尘依然是雨刷器最基本的结构功能,为了保证雨刷器刮除污渍的效果,雨刷器运动规律的研究依然是设计雨刷器的主要依据。
运动规律的分析方法有很多,比较传统的方法包括图解法、解析法和实验法[1],这些传统的方法都有着计算复杂、耗时长的缺点。如今,随着计算机技术的不断更新发展,应用计算机软件对机构的运动规律进行仿真、分析、计算变得越来越多。
MATLAB软件运算功能强大,包含了很多用来解决实际工程问题的工具箱。其中Simmechanics是MATLAB/Simulink模块库中的机构系统模块集,它为多体动力机械系统及其控制系统提供了直观有效的建模分析手段,通过对各种运动副连接的刚体进行建模与仿真,可以实现对机构系统进行分析与设计的目的[2]。本文利用Simmechanics实现了对雨刷器运动机构系统的实时仿真分析和机构运动状态的实时显示,为检验机构结构功能优劣提供了高效的平台,为后续的优化设计提供了有效的分析数据。
1 雨刷器机构运动仿真分析模型
1.1 雨刷器机构模型
某汽车雨刷器机构如图1所示,原动件1绕固定轴心A转动,齿条2与构件1在B点处铰接,并与绕固定轴心D转动的齿轮3啮合(滚子5用来保证两者始终啮合),固联于轮3的雨刷3′作往复摆动。其中各个结构的设计参数为:Lab=18 mm,齿轮3的分度圆半径R=Lcd=12 mm,原动件1以等角速度ω=1 rad/s逆时针回转。

图1 雨刷器机构
由于不规则刚体的形状、惯量矩阵的计算比较复杂,而且对研究运动规律的结果影响不大,因此为了便于计算与仿真,简化构件为规则的圆柱杆。该雨刷机构的结构简化图如图2所示,其中AB杆为原动件1,BC杆为与原动件1在B点处铰接的齿条2,CD为与齿条2啮合的齿轮3和滚子5的简化模型。为了减少参数的设置计算量,假设雨刷机构的仿真初始位置从原动件AB杆与水平方向成90°的位置开始,如图2所示,并将各杆件视为半径为5 mm 的均质圆柱杆。初始位置参数及杆件质量和惯量矩阵的计算,编制的m文件代码如下:
r=0.5;
%圆杆半径
gg=7.81*pi*r^2;
%圆杆单位长度质量
%各个杆件的长度
L1=18;
L2=80;
L3=0.5;
L4=12;
%机构各点的位置
A=[0 0 0];
B=[0 18 0];
C=[56.12 11.93 0];
D=[54.83 0 0];
E=[79.54 9.4 0];
%各个杆件的质量和惯量矩阵
M1=L1*gg*1e-9;
T1=diag([r^2/2,L1^2/12,L1^2/12])*M1;
M2=L2*gg*1e-9;
T2=diag([r^2/2,L2^2/12,L2^2/12])*M2;
M3=L3*gg*1e-9;
T3=diag([r^2/2,L3^2/12,L3^2/12])*M3;
M4=L4*gg*1e-9;
T4=diag([r^2/2,L4^2/12,L4^2/12])*M4;

图3 雨刷器Simmechanics仿真模型
其中,均质圆杆的转动惯量矩阵为:
式中,m为杆的质量,r为杆的截面半径,L为杆长。

图2 雨刷器的结构简图
1.2 Simmechanics仿真模型建立
Simmechanics主要应用于机械系统的刚体运动仿真,在Simmechanics模块集中具有模拟旋转运动、平移运动、固定焊接等运动模块,可以方便地定义刚体的质量属性和运动属性[3]。
仿真模型的建立与Simulink建模相似,可以采用直接拖拽模块到新建的模型中。建立雨刷机构仿真模型时,分析雨刷机构的运动简图,该机构包括机架、3个杆件、1个滑块、4个转动副和1个移动副。因此在刚体子模块组(Bodies)中找出Ground、Machine Environment和Body 3个模块,加入到新建模型中;在运动副模块组(Joints)中找出Revolute和Prismatic两个模块,加入到新建模型中;最后通过雨刷机构简图构件之间的关系,连接各个模块。
曲柄AB杆为原动件,在模型的转动副A处添加驱动。因为原动件以等角速度匀速转动,所以选择检测与促动模块组(Sensors&Actuators)中的Joint Actuator模块。双击该模块,设置输入信号为运动信号Motion,包括角度、角速度、角加速度,并选择角度、角速度、角加速度的单位分别为rad、rad/s、rad/s2。驱动信号可以用Simulink模块库中的信号源(Sources)模块组的Constant模块代表角速度,此处设置为1,它的积分表示角位移,原动件为匀角速度运动,加速度可用Constant模块设置为0来表示。把3个信号一并输入到Joint Actuator中。
雨刷器的Simmechanics仿真模型如图3所示,根据杆件的质量、转动惯量、尺寸等设置模块参数。其中各杆件的两端坐标、质心位置、质量和惯量设置,通过运行m文件获得相应数值。图4为齿条杆BC的参数设置对话框。其中,杆的质量为M2、转动惯量矩阵为T2,质心坐标(E+B)/2,选择世界坐标系;主动端在translated from original of列选择adjoining,并将origin position vector设为(0 0 0);从动端选择世界坐标系,并将坐标E填写到对应栏目中(其他模块参数设置略)。
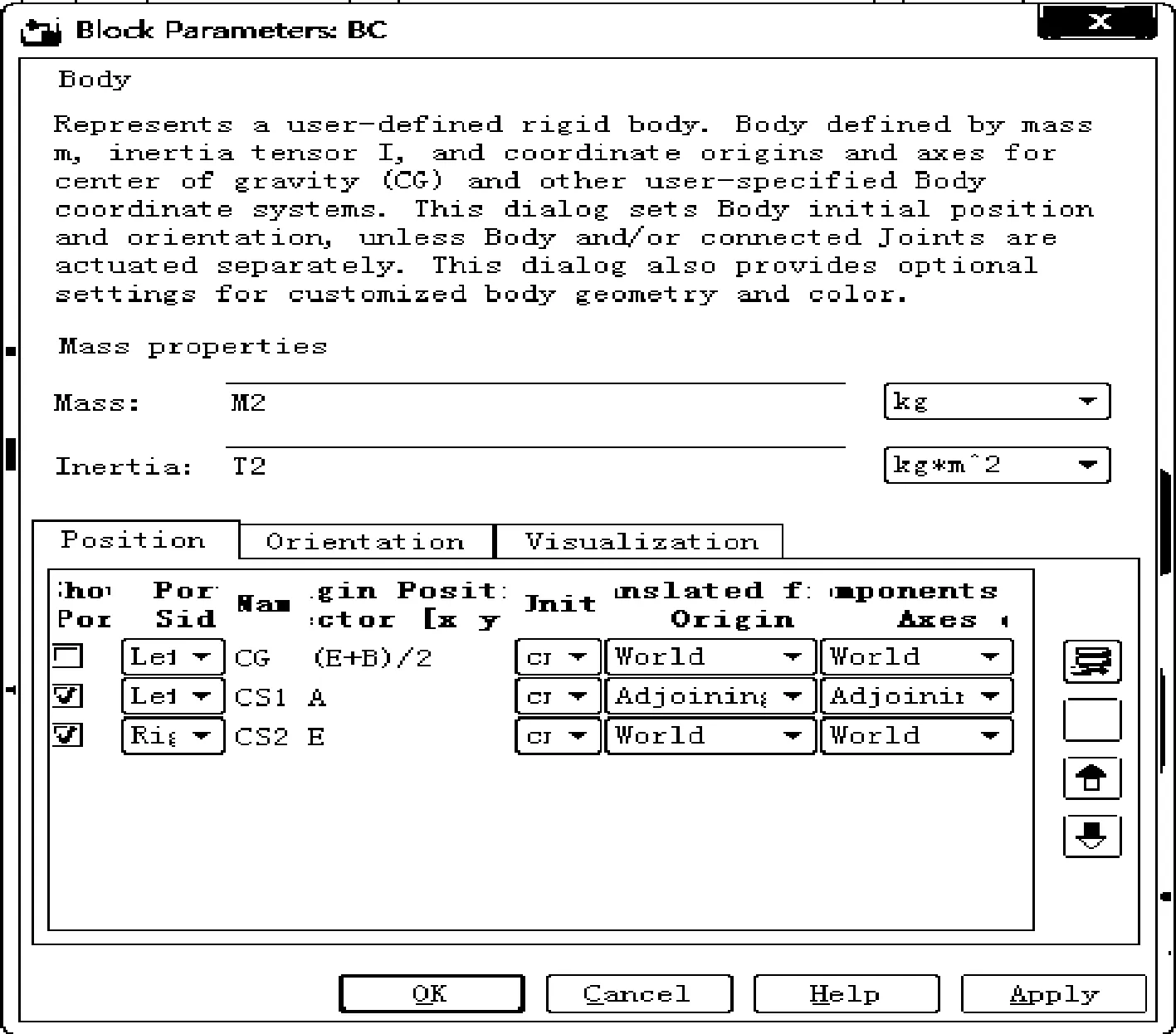
图4 杆件BC的参数设置
雨刷器的运动规律主要通过分析雨刷器转轴D的转动规律获得,在仿真模型中通过检测与促动模块组(Sensors&Actuators)中的Joint Sensor模块输出,因此选择角位移(deg)、角速度(deg/s)和角加速度(deg/s2)3项,并将雨刷器转轴D的运动参数输出到MATLAB工作空间中,然后利用“plot(simout)”命令绘制出运动规律曲线[4-5]。
1.3 仿真的运行与结果
在Simmechanics仿真模型中设置仿真时间以实时动画形式显示参数即可以进行仿真。该雨刷机构的运动周期为6~7 s,所以设置仿真时间为14 s(2个周期),并在Model configuration parameters选项中设置实时动画形式显示(showing animation during simulation),运行仿真[6]。机构的实时仿真动画如图5所示。
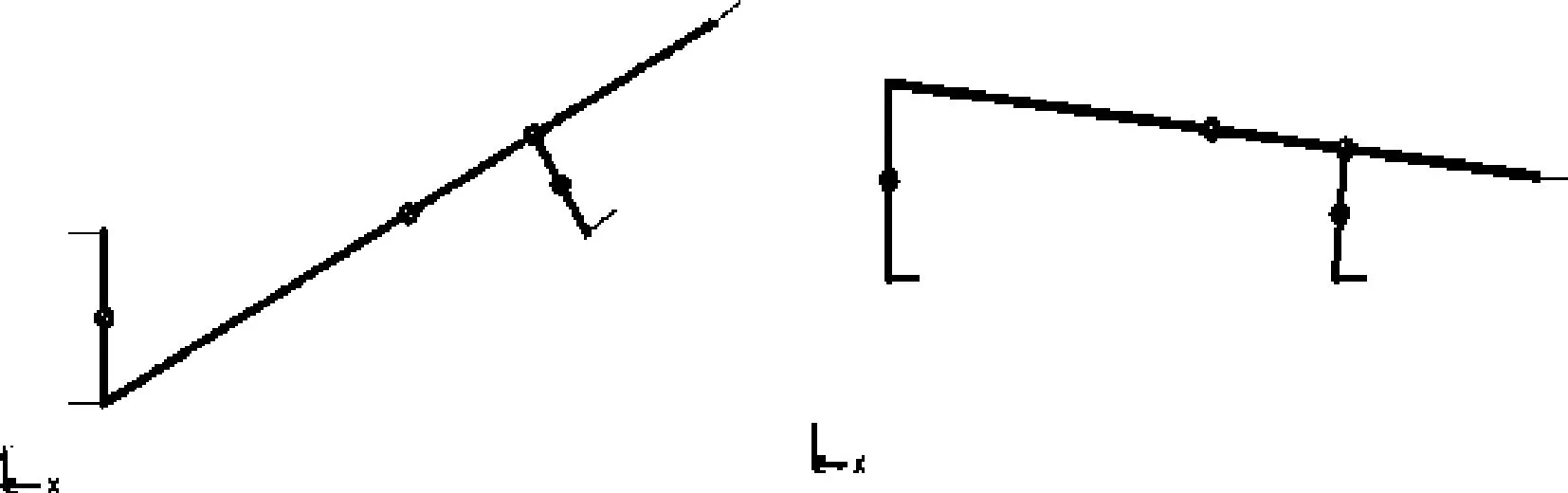
图5 实时仿真动画
转动副D的角位移、角速度、角加速度等数据,通过模块simout输出到MATLAB工作空间中,在工作空间中用“plot(simout)”命令绘制出表示雨刷器转轴D的运动规律曲线,如图6(角位移)、图7(角速度)、图8(角加速度)所示。
从雨刷器转轴D角位移等曲线可以看出:雨刷器以6.28 s为一个周期往复摆动;根据雨刷器转轴D的角位移曲线,可以计算出该雨刷器的摆程角为39.5 deg;根据雨刷器转轴D的角速度,可以得出在匀速输入条件下,在0~3.7 s时间段,雨刷器的角速度值在0~15 deg/s之间变化,在3.7~6.28 s时间段,雨刷器的角速度值在0~30 deg/s之间变化,可见雨刷器具有急回的特性。

图6 雨刷器转轴D角位移曲线

图7 雨刷器转轴D角速度曲线

图8 雨刷器转轴D角加速度曲线
2 结论
通过该雨刷器的运动仿真可以看出,在机械结构的设计过程中,Simmechanics 软件相比传统的解析计算方法有较多的优势。利用该软件建立的模型不仅可以直观地观察雨刷器实时的运动状态,而且根据雨刷器转轴的运动参数,可以快速地获得雨刷器的转动规律。不仅如此,通过修改模块的参数,可以对不同的设计方案进行仿真分析,从而对不同的设计方案进行对比,实现雨刷器结构的优化设计,为后续的设计提供依据。可见,基于MATLAB的Simmechanics机构系统仿真,无论从功能还是效率上都有较大的优势。
[1] 魏兵,熊禾根.机械原理[M].武汉:华中科技大学出版社,2007.
[2] 杨树川,邵金龙,杨术明,等.基于Solidworks & SimMechanics的机构运动分析与仿真[J].河北工业科技,2011,28(4):221-225.
[3] 江乐果,朱华炳.基于SimMechanics的仿人机器人运动学仿真[J].机床与液压,2014(21):75-80.
[4] 向小健,许尔威,刘浩宇.基于Matlab的四杆/六杆颚式破碎机动态仿真[J].机械工程与自动化,2014(3):40-45.
[5] 王增胜,孔令云,郭晓君.基于 Simmechanics 的偏置曲柄滑块机构运动学建模及仿真研究[J].现代机械,2013(5):19-22.
[6] 薛定宇,陈阳泉.基于MATLAB/SIMULINK的系统仿真技术与应用[M].北京:清华大学出版社,2011.
Research for kinematic simulation of motor vehicle wiper based on Simmechanics
Jin Yingli, Ma Lipeng
(School of Mechanical Engineering, Shenyang University of Technology, Shenyang 110870, China)
For increasing the design level and efficiency of motor vehicle wiper,the article uses the Simmechanics which is the dynamic simulation module of MATLAB to build the simulation model of motor vehicle wiper, and describes the modeling method and the simulation process. The results show that the simulation method can efficiently and accurately obtain the motion parameters of the wipe. It can provide data support for the size selection and structure optimization design of wipe.
MATLAB; Simmechanics; wipe; kinematic simulation
TP391.9
A
10.19358/j.issn.1674- 7720.2017.13.026
金映丽,马礼鹏.基于Simmechanics的汽车雨刷器运动仿真研究[J].微型机与应用,2017,36(13):85-87.
2017-01-09)
金映丽(1972-),女,博士,副教授,主要研究方向: CAD/CAM、机械强度。
马礼鹏(1991-),通信作者,男,硕士研究生,主要研究方向:机械设计。E-mail:marleap_mlp@163.com。
猜你喜欢
机电信息(2021年17期)2021-07-01 05:14:00
上海大中型电机(2021年1期)2021-06-09 09:12:06
四川建筑(2021年1期)2021-03-31 01:01:46
建筑机械化(2020年7期)2020-08-15 06:41:32
山东冶金(2019年2期)2019-05-11 09:12:24
课程教育研究·学法教法研究(2018年14期)2018-08-11 09:09:46
光学仪器(2016年5期)2017-01-12 14:28:05
电脑爱好者(2016年23期)2017-01-05 20:39:51
科技创新与品牌(2016年8期)2016-09-29 22:25:52
工程建设与设计(2016年1期)2016-02-27 10:50:15