
扩展卡尔曼滤波在组合导航中的应用
2017-08-08 03:25管雪元李文胜
传感器与微系统 2017年8期
沈 凯, 管雪元, 李文胜
(南京理工大学 瞬态物理国家重点实验室,江苏 南京 210094)
扩展卡尔曼滤波在组合导航中的应用
沈 凯, 管雪元, 李文胜
(南京理工大学 瞬态物理国家重点实验室,江苏 南京 210094)
松组合导航中,采用组合导航系统(SINS)误差作为状态量,用SINS解算的位置和速度与全球定位系统(GPS)测量的位置速度之差作为量测信息。为了提高组合导航的精度在松组合导航中应用扩展卡尔曼(EKF)滤波算法,通过仿真对载体轨迹的速度、姿态、位置进行跟踪。仿真结果表明:在仿真进入8 min之后系统进入稳态,能准确跟踪载体。因此,采用基于EKF的非线性滤波能有效跟踪载体的位置、速度和姿态。
松组合; 扩展卡尔曼滤波; 组合导航
0 引 言
全球定位系统(global positioning system,GPS)凭借其全天候、实时性等优点,投入运行以来,在各个领域得到越来越多的应用。而GPS的信号可能被干扰,或者在隧道,森林等地区无法接收[1]。因此,在导航系统中常用惯导和GPS进行组合。组合导航系统(INS)稳定性好,不受外界因素影响,更新速率高等优点正好弥补了GPS的不足[2]。
本文采用微系统(MEMS)惯性传感器,具有体积小、重量轻、成本低等诸多优点[3,4]。GPS和惯导的组合导航常用卡尔曼滤波进行数据融合,当惯性器件精度较差或者载体做高速运动时,系统中的非线性因素影响不可忽略,工程上常用非线性滤波算法进行处理[5]。本文采用扩展卡尔曼滤波(extended Kalman filtering,EKF),通过仿真计算分析其性能。
1 组合导航原理
图1为松组合系统的结构框图。松组合中采用的量测信息为位置与速度,利用GPS子系统解算得到的位置、速度与惯导解算出的位置、速度之差作为卡尔曼滤波器的输入,得到惯导系统状态误差估计值[6,7]。将状态误差估计值的陀螺仪和加速度计漂移反馈给惯导系统以对其进行校正,状态误差估计值中的位置和速度误差对惯导解算后的位置和速度信息进行校准,输出为组合导航的最终结果。其中惯导数据由利用轨迹发生器产生,根据载体对应的比例和角速率解算出SINS系统的导航输出信息,即位置和速度。
2 组合导航算法
2.1 组合导航数学模型
2.1.1 松组合系统状态方程


(1)

图1 松组合系统结构
状态方程为
F(t)为系统状态转移矩阵

(2)
式中FINS由惯导基本误差方程决定
(3)
式中G(t)为系统噪声传播矩阵
(4)
2.1.2 松组合系统量测方程
设载体的真实纬度为L、经度λ、高度h;惯导输出纬度LI、经度λI、高度hI;GPS输出纬度LG、经度λG、高度hG;NN,NE和NU为GPS接收机导航下的位置量测误差,则有
(5)
取惯导和GPS的输出的位置差值作为系统量测值,则位置量测方程为

(6)
设载体真实东向速度为VE、北向速度VN和天向速度VU,惯导输出速度分别为VIE,VIN和VIU,GPS输出速度分别为VGE,VGN和VGU,NVE,NVN,NVU为GPS速度量测误差,则
(7)
取惯导和GPS输出的速度差值作为系统量测值,则速度量测方程为

(8)
将式(6)和式(8)组合,得到量测方程

(9)
2.2 扩展卡尔曼滤波算法
扩展卡尔曼滤波(extendedKalmanfiltering,EKF)建立在线性卡尔曼滤波的基础之上,其核心思想是对非线性系统用泰勒级数展开,忽略其高阶项,得到近线性化模型,然后进行滤波[8~10]。设非线性模型为
(10)
EKF方程组如下
(11)

(12)
(13)
3 实验结果
如图2、图3所示为载体的运动轨迹,载体以北纬44.974°,西经93.147°,高321.00 m,为起始坐标点(0,0),环绕运动。
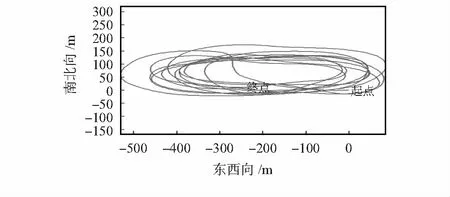
图2 载体运动轨迹
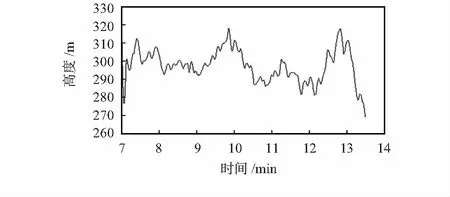
图3 载体高度轨迹

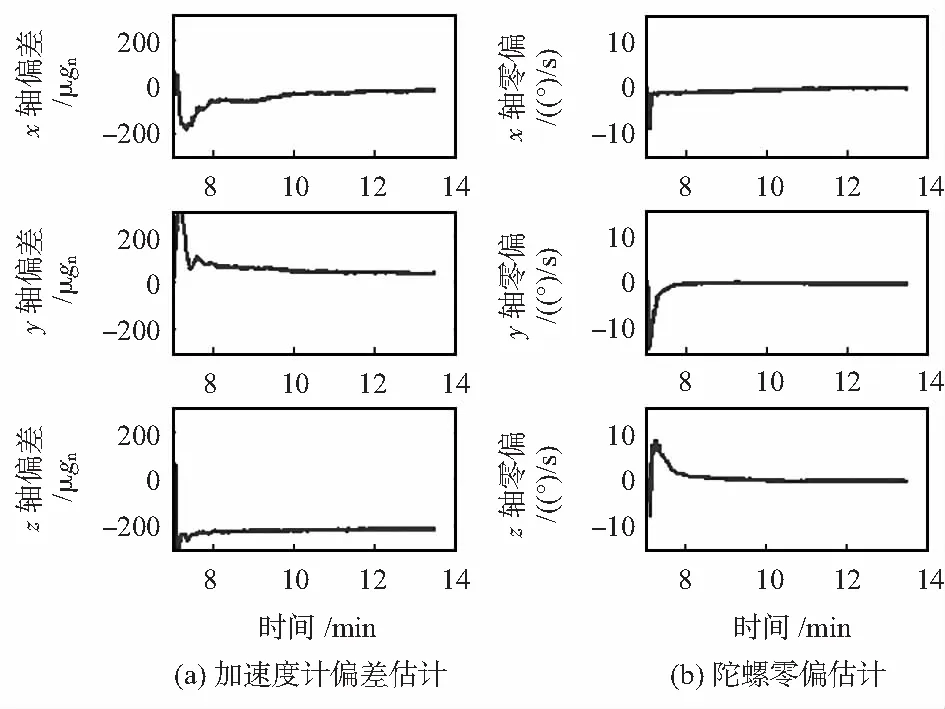
图4 加速度计和陀螺误差估计
图5、图6分别为姿态误差角(φE,φN,φU)、速度误差(δVE,δVN,δVU)的状态曲线。
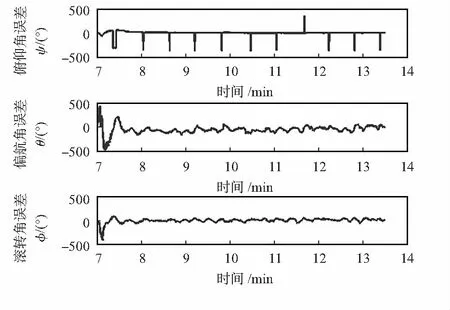
图5 姿态误差
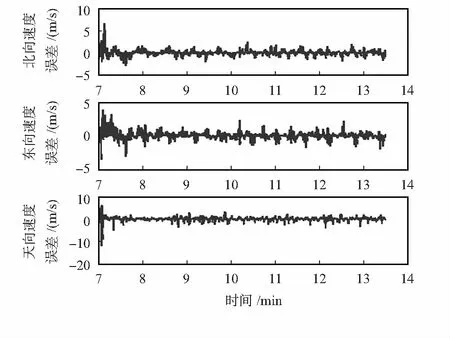
图6 速度误差
由图6可以看出,系统仿真在8 min之后误差稳定,速度误差在5 m以内。能有效跟踪载体的姿态和速度。
4 结束语
主要研究了EKF在松组合中的应用,建立了组合导航系统数学模型,对EKF算法在组合导航系统中的应用进行分析。仿真结果表明,使用EKF算法的组合导航系统能有效跟踪系统,稳定性良好。
[1] Wang X, Li Y.An innovative scheme for SINS/GPS ultra-tight integeration system with low-grade IMU[J].Aerospace Science and Techology,2012,23(1):452-460.
[2] 葛 俊,王新龙,车 欢.一种SINS辅助GPS跟踪环路的新型松组合导航系统方案设计[J].航空兵器,2015(1):10-15.
[3] 赵 岩,程烘炳,吴训忠,等.基于MEMS的低成本SINS_GPS组合导航系统研究[J].传感器与微系统,2011,30(8):18-21.
[4] 刘 泽,黎福海,肖祥慧,等.MEMS技术在车载导航中的应用[J].传感器与微系统,2010,29(12):131-134.
[5] 陆海勇,赵 伟,熊 剑,等.强跟踪UKF滤波在SINS-GPS组合导航中的应用研究[J].航空电子技术,2008,39(4):5-10.
[6] 吴春光,李双明,潘玉纯.EKF和UKF在非线性组合导航系统中的对比研究[J].长春理工大学学报:自然科学版,2016,39(2):82-85.
[7] 王君帅,王新龙.SINS紧组合和松组合导航系统性能仿真分析[J].航空兵器,2013(2):14-19.
[8] 于 洁,王新龙.SINS/GPS紧密组合导航系统仿真研究[J].航空兵器,2009(6):8-13.
[9] 郭庆峰,闫连山,肖辰彬,等.带倾角补偿的低成本GPS/BD-DR组合导航系统设计[J].传感器与微系统,2013,32(10):68-73.
[10] 包 超,郭美凤,周 斌,等.MIMU-GPS组合导航系统小型化设计[J].传感器与微系统,2014,33(1):116-119.
Application of EKF in integrated navigation system
SHEN Kai, GUAN Xue-yuan, LI Wen-sheng
(National Key Laboratory of Transient Physics,Nanjing Universty of Science and Technology,Nanjing 210094,China )
In loose combined navigation system, using the SINS error as state quantity ,the difference between the position and velocity of the SINS solution and the difference of position and velocity measured by GPS as measurement information.In order to improve the precision of integrated navigation, using the eatended Kalman filtering(EKF) algorithm in loose combination of navigation, through simulation,trajectory speed, attitude, position tracking of the carrier are carried out.The simulation results show that the system enters the steady state after 8 minutes, and it can accurately track the carrier.Therefore, the nonlinear filtering based on EKF can effectively track the position, velocity and attitude of the carrier.
loose combination; extended Kalman filtering(EKF); integrated navigation
10.13873/J.1000—9787(2017)08—0158—03
2016—09—12
TN 966
A
1000—9787(2017)08—0158—03
沈 凯(1991- ),男,硕士研究生,研究方向为组合导航,E—mail:214598145@qq.com。
猜你喜欢
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
测控技术(2018年2期)2018-12-09
测控技术(2018年12期)2018-11-25
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2017年9期)2017-12-18
中国惯性技术学报(2017年1期)2017-06-09
中国惯性技术学报(2017年1期)2017-06-09
百科探秘·航空航天(2016年9期)2016-12-01
电源技术(2016年9期)2016-02-27
