远程智能家居控制系统设计
2017-08-02 08:59陈诚斌苏凯雄
网络安全与数据管理 2017年14期
陈诚斌,苏凯雄,赵 阳,刘 梦,邱 瑾
(福州大学 物理与信息工程学院,福建 福州 350100)
远程智能家居控制系统设计
陈诚斌,苏凯雄,赵 阳,刘 梦,邱 瑾
(福州大学 物理与信息工程学院,福建 福州 350100)
本设计致力于解决家庭安防、智能家居控制、远程视频监控、自动清洁控制问题。机器人集成自动巡航、自动清洁、远程陌生人报警、烟雾报警、火焰报警、远程视频监控、远程云台控制、远程机器人遥控、家电遥控学习以及家电遥控等功能。使用C/S模拟P2P技术,搭建服务器、客户端,进行Socket通信。通过在家居中建立各种形式的通信网络,实现对所有家庭网络上的设施的控制和维护;其次,通过无线网络通信方式构成与外界的通信通道,以实现与外部世界的信息沟通,满足远程控制的需要。
智能家居;机器人;C/S模拟P2P; Socket
0 引言
目前智能家居系统的安装、调试和使用过于复杂,功能综合型的就更加复杂,这将制约智能家居产品从研发产品向消费产品的转化[1]。远程智能家居控制系统旨在于搭建一种动态的家庭智能家居生态圈,能以机器人为核心,对新、老房屋进行智能化升级,利用网络技术将所有数据和信息上传到云端,使业主能点对点地控制家庭内部,了解家庭信息,再配合其他家庭节点和家庭智能设备,更好地把握家庭内一举一动。
1 远程智能家居控制系统的总体设计
智能家居护卫系统主要由监控终端(手机)和家庭护卫(机器人)组成,可以对家庭的情况进行实时的监控。监控终端可以选择多种模式对家庭护卫进行远程遥控或者让其自行巡逻,可以从家庭护卫调取实时的监控画面,接收异常报警,对红外家居进行远程遥控等操作。家庭护卫集成多种智能家居功能,如自动避障防跌落、集成红外学习遥控、入侵者检测、明火煤气检测、路由节点、监控回传等模块,实现智能家居不用改造家庭,即买即用的工作特点。在公司工作的间隙,可以拿出你的手机,带上虚拟现实设备,随手打开空调,看看电视,获得如同在家中的体验[2]。
系统交互概述图如图1所示。

图1 系统交互概述图
2 远程智能家居控制系统硬件设计
2.1 手机客户端控制系统模式设计
有个友好的交互方式是解决机器人和人本身交互的必要环节。本设计使用Android手机客户端为设计的显示单元,共三种模式:控制模式、巡航模式、清洁模式,可选择打开视频,在视频界面的基础上可选择打开控制面板、遥控面板。
控制面板:主要包括家庭智能终端运动控制面板和摄像头云台运动控制面板,可分别控制智能终端和摄像头云台的前、后、左、右和停止动作。
遥控面板:两种模式,一个是学习模式,一个是遥控模式。当处于学习模式时,按键将会发送学习指令和按键码值;当处于遥控模式时,会发送遥控指令和按键码值。
2.2 智能机器人控制系统设计
智能终端机器人挂载了许多红外避障传感器,根据用户端的设置可以处于受控模式、自动巡逻模式和清洁模式。处于受控模式时,将根据用户端的指令进行相应的动作,例如整体运动、云台运动和红外学习控制。处于自动巡逻模式时,通过挂载的红外避障传感器判断自身所处的状态,自动规避障碍物和台阶,实现防碰撞和防跌落,并通过巡逻算法自动调整路线使得能巡逻范围能够覆盖整个家庭范围。处于清洁模式时,智能终端机器人将开启挂载的清洁装置进行地面除尘清洁。
2.3 OpenWrt通信模块设计
通信的信息转发中心与摄像头进行USB通信,与手机客户端通过WiFi进行Socket通信,与51单片机数据采集控制板进行UART通信。OpenWrt模块是中心服务器,采用mjpg-stream进行视频采集,生成视频流可以提供网页形式的调用。手机客户端只要获得该服务器的地址,就可以从服务器上面提取视频流或者图片。
OpenWrt同时采用ser2net对来自手机客户端的Socket数据和来自51单片机数据采集控制板的串口数据进行转换交互,使得来自51单片机数据采集控制板的串口数据能够以Socket的形式上传到手机,同样使来自手机的Socket数据能够以串口数据的形式下达到51单片机数据采集控制板。
3 远程智能家居控制系统软件设计
3.1 C/S模拟P2P
与传统的智能家居点对点通信不同,本设计使用C/S模拟P2P技术,即机器人端以及手机APP端都为客户端,监听服务器,当用户通过APP登录时[3-4],才建立双向连接通信,用户离线时断开连接并继续监听连接信息,避免了传统的IP摄像头容易被人知道IP地址侵入的隐患。同时本设计建立了服务器连接,可以将更多的安防信息通过服务器进行传输。本设计的文本传输以及视频传输都使用了这项技术。
3.2 Server端实现
公网上的Server开启9999端口监听APP端基于UDP协议的指令;开启9998端口监听APP端基于TCP协议的指令,同时监听Car的请求指令的连接。来自9999的UDP指令和来自9998的TCP指令经由处理统一经9998端口转发给Car。同时Server开启9996端口监听接收来自Car的视频数据,开启9997端口监听来自PX2的请求视频数据的连接,将来自9996的数据经由9997转发给APP实现视频监控。服务系统设计如图2所示。

图2 服务器系统设计
3.3 家庭安防系统设计
搭载在移动机器人上面的中央控制器轮询火焰传感器、烟雾传感器和人体传感器等搭载传感器的输出状态,实时地对家庭的安全情况进行监测。当出现险情时,控制单元调用串口向手机用户发送有信号输出的传感器代号,手机端判断Socket接收到的数据后检测传感器代号从而判断出相对应的安全事件,并调用蜂鸣器发出警报声音,输出报警提示信息,延迟一段时间后重新检测接收到的数据。
3.4 智能家居控制
机器人除了能够自主移动,还可以由用户手动控制,用于查看家中感兴趣的区域,并实现远程红外遥控家电。进入遥控模式后,手机用户端可以启动视频并打开机器人遥控面板,对机器人和视频云台进行前后左右控制。同时为了满足能不对家电进行改造完成远程遥控,机器人配备了红外学习功能,如图3所示。在对遥控键值进行学习后,可以将机器人通过视频控制到相应家电区域对家电进行控制[5]。
3.5 远程视频监控
搭载在移动机器人上面的摄像头经过路由器将视频数据传送到手机上。路由器使用OpenWrt系统[6]。OpenWrt服务端通过启动热点服务,调用mjpg-stream获取摄像头数据,生成视频流,配置视频流绑定IP地址,对外开放服务;手机用户端通过输入OpenWrt服务器IP地址连接到服务器,并等待视频服务开启,从服务器获取视频流从而显示视频的图像。
3.6 自动清洁控制
在自动清洁模式下,机器人通过自动避障算法确定路线,躲避障碍物和阶梯,同时清洁刷和吸尘器开始工作,并通过实时读取红外壁障和红外防跌落传感器数值,判断有效信号是否触发。若没有有效信号触发则智能家居机器人继续前进;若有效信号触发则进一步判断机器人所处状态,遇到障碍物就判断障碍物方位,调整机器人方向进行规避,遇到“悬崖”就调整机器人方向离开悬崖的位置。
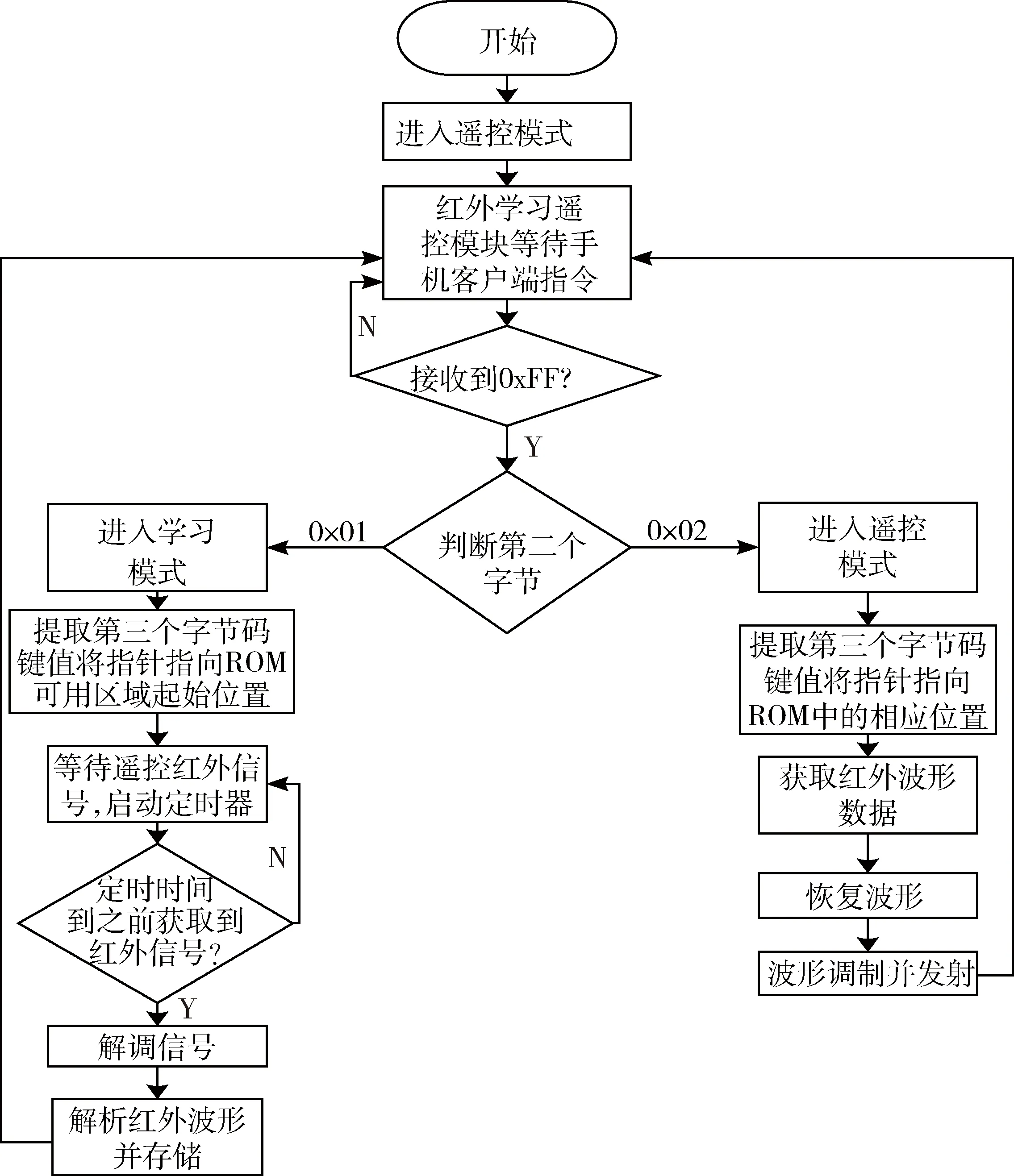
图3 红外学习及红外遥控
4 系统测试
气雾传感器能够正确感知打火机里的气体并报警,火焰传感器能够检测到打火机的火焰并报警,但在阳光较强的地方会误报。人体红外传感器能够检测到移动的人体并报警。红外学习模块工作正常,实现了对宿舍空调的学习和遥控。智能机器人三种工作模式正常,能够自动壁障和防跌落,提起能够自动停止。手机端视频显示、云台和车体控制等功能正常。
5 结论
本次设计完成了远程智能家居控制系统的基本架构,实现了普通通信设备远程控制家中智能机器人的设计目标。通过手机客户端控制系统设计、智能机器人控制系统设计、智能机器人服务端设计、OpenWrt通信模块设计,运用智能机器人解决了家庭安防、智能家居控制、远程视频监控、自动清洁控制等问题,并具备自动巡航、自动清洁、远程陌生人报警、烟雾报警、火焰报警、远程视频监控、远程云台控制、远程机器人遥控、家电遥控学习以及家电遥控等功能,满足人们对安全、舒适、方便的需求。
[1] 朱敏玲,李宁.智能家居发展现状及未来浅析[J].电视技术,2015,39(4):82-85.
[2] 汪刚,张福,陈宇航,等.一种远程智能家电控制系统设计与实现[J].机械与电子,2010(11):51-53.
[3] 渠淼,牛国锋,冒张霄,等.基于Arduino的智能环境监控系统设计[J].微型机与应用,2014,33(20):83-85.
[4] 何中胜,赵红玉,庄燕滨,等.基于单片机的通信机房环境监控系统的开发研究[J].微型机与应用,2013,32(17):60-62,68.
[5] 杨雪娇,郝业,阮军洲.Android平台增加专用无线模块的设计与实现[J].计算机与网络,2016,42(7):64-67.
[6] 张红红.连卫民.远程监控系统的设计与实现[J].计算机与数字工程,2012,40(6):98-100.
Design of remote intelligent home control system
Chen Chengbin, Su Kaixiong, Zhao Yang, Liu Meng, Qiu Jin
(School of Physics and Information Engineering, Fuzhou University, Fuzhou 350100, China)
The design is committed to solving the problems of home security, intelligent home control, remote video monitoring, and automatic cleaning control. Robot is integrated automatic cruise, automatic cleaning, remote stranger alarm, smoke alarm, flame alarm, remote video monitoring, remote PTZ control, remote robot remote control, remote home appliances and home appliances remote control and other functions. This work uses C/S to imitate P2P technology, to build server and customer end, undertaking Socket communication. Through the establishment of various forms of communication networks in the home, it achieves all the home network facilities on the control and maintenanc. Secondly, through the wireless network communication with the outside world it constitutes a communication channel in order to achieve communication with the outside world to meet the remote control needs.
intelligent home; robot; C/S simulating P2P; Socket
TP311
A
10.19358/j.issn.1674- 7720.2017.14.027
陈诚斌,苏凯雄,赵阳,等.远程智能家居控制系统设计[J].微型机与应用,2017,36(14):89-91,94.
2016-12-02)
陈诚斌(1992-),男,硕士,主要研究方向:智能硬件、数字通信。
苏凯雄(1959-),男,硕士,教授,主要研究方向:无线通信、卫星通信、数字电视广播、多媒体应用系统。
赵阳(1995-),男,本科,主要研究方向:智能硬件。
猜你喜欢
环球时报(2022-05-23)2022-05-23
小学生优秀作文(低年级)(2021年11期)2021-12-06
金桥(2021年4期)2021-05-21
电子制作(2019年20期)2019-12-04
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25
语文世界(小学版)(2019年2期)2019-02-24
电子制作(2018年1期)2018-04-04
中国公共安全(2017年5期)2017-09-04
科学生活(2015年3期)2015-01-03