国外非传统艇型及结构潜艇技术发展与总体设计思想分析
2017-08-01 00:02彭亮斌吴有生司马灿马向能曹海斌周念福
船舶力学 2017年7期
彭亮斌,吴有生,司马灿,马向能,曹海斌,周念福
(中国船舶科学研究中心 深海载人装备国家重点实验室,江苏 无锡 214082)
国外非传统艇型及结构潜艇技术发展与总体设计思想分析
彭亮斌,吴有生,司马灿,马向能,曹海斌,周念福
(中国船舶科学研究中心 深海载人装备国家重点实验室,江苏 无锡 214082)
非传统潜艇具有利于搭载特殊作业任务模块等特点,现在已有越来越多的新型潜艇设计思路被提出。文中较为详细地介绍了国外非传统潜艇技术发展动态,阐述了非传统潜艇在大潜深、浅水水域航行和舷间空间利用方面的独特优势。文中探讨了非传统潜艇的技术特点和发展方向,并分析了非传统潜艇需要解决的关键技术,给出了作者的一些初步结论和见解。
非传统潜艇;艇型及结构;特种作业任务;有效负载
0 引 言
潜艇艇型及结构是潜艇外在表现的主要技术特征之一,其变化一直是随着潜艇战争赋予的主要使命与非战争作业任务要求不断在发展变化,艇型及结构的演变与发展是决定或牵引潜艇技术发展的重要方面。潜艇艇型、结构形式、机械设备配置、分舱与总布置、排水量与储备浮力等之间存在相互联系与制约,从某种意义上说,在潜艇总体顶层设计阶段,艇型及结构的选取就大体上决定了潜艇的主要性能与技术状态。分析世界潜艇近一百多年的发展历程,艇型由常规型、过渡型艇型逐步发展到现在的水滴型艇型潜艇,结构形式有二战时期常见的个半壳体结构形式潜艇,到现在主流单壳体与双壳体结构形式潜艇,以及近年来兴起的多耐压壳体的结构形式潜艇。无论潜艇采用是单壳体还是双壳体,其共同技术特点是当前潜艇主要为单耐压壳结构形式与水滴型艇型,这也是当今经典传统潜艇的主要技术特征之一。
然而,随着水下技术的快速发展,以及世界各国海洋国土安全防卫与资源争夺日益激烈,潜艇的使命和任务也开始发生了一定变化,潜艇由执行单一作战任务逐渐向可执行包括资源开发、科学研究等多功能任务的方向发展,这就要求潜艇总体设计必须突破传统潜艇设计框架与设计理念,提出一些非传统艇型及结构的新型潜艇,以适应不同技术需求。非传统潜艇对大潜深、浅水水域航行、舷间作业与武器模块搭载等方面可能表现独特适应优势,而且为总体设计提供了更加多样可变的设计调整空间。近年来,陆续有报道披露世界许多国家正在开展非传统潜艇的相关研究。上世纪90年代,美国未来潜艇研究小组提出了,以扁平型潜艇作为未来潜艇发展趋势为思路的概念方案。2004年,美国海军和美国诺斯洛普格拉曼公司提出了多型非回转体艇型的潜艇设计方案,并对其技术特点进行了分析比较。随后于2008年至2011年间,美国研究机构多次公布了扁平非传统潜艇的水动力模型试验与计算分析的研究结果[1-4],对扁平艇型潜艇的水动力航行性能进行了系列研究,并开展了系列化线型优化设计。2010年,荷兰提出了以扁鱼多体潜艇为中心节点的水下网络战体系,并较详细论述了搭载舷外有效负载的三壳体新型潜艇的设计图像。2003年到2012年,法国总装备部造船局也推出了SMX系列扁平多体新型潜艇设计方案,尤其在“欧洲海军装备展”上推出的SMX-26潜艇,引起了广泛的关注,足见其对非传统新型潜艇的研究深度。本文研究总结了近年来国外非传统艇型及结构潜艇技术发展,阐述分析了其总体设计思想、主要技术特征以及其需要解决的关键技术。
1 非传统艇型及结构潜艇的技术发展内涵及技术特征
国际上对于新型的非传统艇型及结构潜艇研究较早,特别在载人潜水器上,非回转水滴艇型与多耐压壳结构形式的应用比较常见。非回转艇型主要包括仿生扁平、蝶形艇型,非传统结构主要是区别于传统的单耐压柱壳结构形式,主要表现形式有双柱壳、三柱壳、多柱壳、多球壳、球柱组合、环形柱壳等新型结构形式。美国、苏俄、欧洲国家等对非传统潜艇开展相关研究应用比较多,下面以不同结构形式进行总结分类,系统介绍世界各国典型的非传统艇型及结构潜艇的研究进展情况、技术内涵与技术特征。
1.1 双柱壳结构形式潜艇
1910型潜艇是俄罗斯一型多功能深海核动力作业潜艇[5],北约称为“军服”级(Uniform)潜艇,主要用于执行特种任务的核潜艇,在上世纪70年代初由“孔雀石”设计局设计,历经10余年的论证设计工作,由海军部造船厂建造,首艇AS-13于1982年下水。该潜艇为前后串列布置的双柱壳结构形式(图1),前耐压壳主要为人员聚集的指挥控制舱,主要布置指挥与操艇设备、人员生活居住设施、蓄电池、供配电设施等,后耐压壳为动力舱,主要布置核反应堆与发电机组设备。该结构形式将动力区与人员工作生活区进行隔离设计,有利于减少动力设备对人员的影响。该潜艇为一深海核动力潜艇,不装备传统的鱼雷等武备,可在深海进行长期作业,在海底执行特殊作业任务,并可执行运送特种部队等特殊任务。潜艇舷间还搭载了吊放装置、ROV、机械手、探测与观察等功能模块。为了作业时便于潜艇的操控,艏艉配置6具辅助推进装置,分别位于两舷与上层建筑(可回收)内,同时还在底部配有两对脚靴状坐底装置(图2)。1910型潜艇的潜深达700m(也有资料认为潜深可达1 000m),排水量1 390/2 000t(水面/水下),主尺度为69 m×7 m×5.2m(艇长×型宽×吃水)。潜艇装载有1座核反应堆,2台汽轮机,额定功率为10 000马力,航速为10/30kns(水面/水下),单轴单桨主推进方式。该艇总共建有3艘,编号分别为AS-13、AS-15和AS-33。由于其执行任务特殊性,俄罗斯官方有关这方面的详细报道比较少见。
2005年美国弗吉尼亚理工大学研究提出了用于特种作战的近海多用途潜艇 (SSLW)[6](图3),为了潜艇可以有效地在浅水海域执行隐蔽行动,潜艇艇型与结构设计思路必须与以往不同。该潜艇采用扁平外形,双艉X型操纵面,双层壳体。耐压结构为并排双圆柱壳体,壳体之间通过过渡结构交贯连接,端部采用球面封头。潜艇的这种艇型与结构形式可以减少吃水,潜艇的浅水耐波性、机动性与隐蔽性较单柱壳潜艇有优势,可以保证舱室空间更加有效利用,可以满足在30 m以内的浅水水域灵活航行。潜艇(SSLW)总长为44.8m、型深为3.96m、型宽为8.53m,水下全排水量为1 453t,工作潜深90 m,水下最大航速20 kns、巡航航速6 kns,水下续航力2 590nmile,人员编制12人。左右壳体内设置有指挥控制舱、生活舱与机舱,机舱设有两套燃料电池电力推进系统,最大输出功率250kW。左舷耐压壳中线重心靠前设置了艇员快速通过潜艇的出入代换舱,允许分两次通过8名特种作战人员及其冲锋筏。武器主要装备4套内置式鱼雷发射管、6枚外置式自航发射鱼雷。潜艇的舯部设有一个5.48m×2.4m× 6 m的湿式有效载荷搭载舱,可以携带攻击武器、无人作战潜航器、水下反水雷工具、用于提高电子监听和反探测能力的设备等。

图1 俄罗斯1910型潜艇双柱壳结构形式与外形布局图Fig.1 Double pressure shells form and shape plans of 1910 class submarine for Russia

图2 俄罗斯1910型潜艇搭载功能模块Fig.2 The payload module of 1910 class submarine for Russia
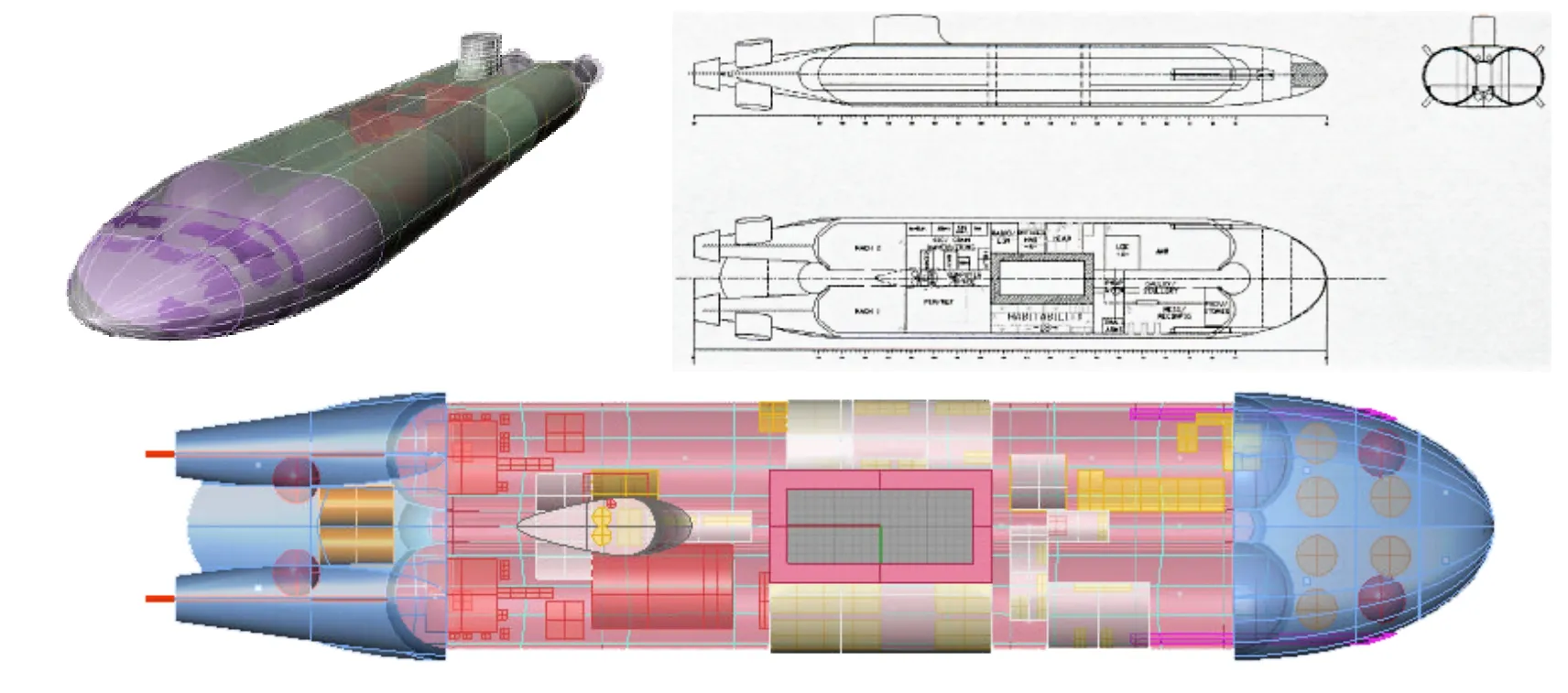
图3 近海多用途潜艇(SSLW)潜艇的外形布局图Fig.3 Littoral warfare submarine shape plans
法国总装备部造船局研究并提出了SMX-21多用途概念型潜艇,图为2003年“欧洲海军装备展”展出的SMX-21多用途概念型潜艇的外形示意图。SMX-21概念型潜艇的总长为64.5m,水面排水量2 700t,水下最大航速大于18 kns,工作潜深大于250m,续航力为9 000nmile,自持力为60昼夜。该型潜艇采用了全新的水动力布局,扁平外形,双泵喷推进方式,采用两个圆柱形耐压壳体。SMX-21型概念潜艇设有常规内置式鱼雷发射管,另外,在耐压壳体与轻外壳之间,装备3个武器模块。这些武器模块包括标准的可互换武器发射管,共计多达30件武器。武器模块可以根据各种任务加以设计,每一个武器模块均有10枚武器,包括轻型和重型鱼雷、水雷、防空导弹、反舰导弹和巡航导弹,能执行多种作战任务,包括反潜、反舰、防控、对陆及特种作战等。
2012年10月“欧洲海军装备展”上法国DCNS公司再次设计推出了SMX-26浅水近海作战潜艇[7](图5)。法国DCNS公司认为,由于受到近海航行与浅水海域隐藏要求等限制,使得传统艇型近海潜艇具有吨位小、搭载有效负载有限、舒适性与声纳环境较差等缺点。该潜艇主体为两个直径3.9m的柱壳体结构,这两个壳体之间通过直径2.5m的过渡壳体结构相连,设有双艉,并采用两个主推与四个可回收的全回转辅推推进方式,其艏部采用了共形声纳。这种结构形式决定的艇型潜艇可以在最小12 m深度浅水域航行,特别适用于近海浅水水域航行作战。

图4 法国提出的SMX-21概念型潜艇图Fig.4 SMX-21 new concept submarine design by DCNS
该型潜艇正常排水量1 003t,总长为39.5m,最大宽度15.5m,水下最大航速约10 kns,工作潜深100m,4 kns混合推进的水下续航力为7 000海里,工作潜深大于250m。该型潜艇特别适合在近海浅水水域隐蔽航行作战,可长时间水下坐底或低速巡航,能够对周围环境进行持续监测。可携带2枚重型和8枚轻型鱼雷武器,并在桅杆上装备了防空导弹与20 mm口径机关炮,形成防空自卫与反潜反舰能力,同时可搭载特种部队在水面水下执行特种作战任务,执行对陆对海情报搜索、特种部队快速部署与作战等多种任务,弥补了常规艇型小型近海潜艇作战能力有限的缺点,可以满足一型潜艇就可执行多种作战任务的现实需求。

表1 SMX-26潜艇的主要技术参数Tab.1 The main characteristics and performances of SMX-26
2012年挪威海洋科技研究院工程师托尔·贝格介绍了针对北极地区正在研发一种特殊的潜艇[8],见图6。它为扁平艇型,长约41 m,宽15 m,潜深450m,水下航速8 kns,排水量1 500t,水下逗留时间14天,可载10到14人,采用8×75kW的斯特林发动机,携带水下作业工具,进行水下油气开采辅助作业,如可安全高效地实施安装和维修钻井平台,其结构形式未透露。

图5 法国DCNS公司提出的SMX-26潜艇概念方案Fig.5 SMX-26 new concept submarine design by DCNS

图6 挪威海洋技术科学院提出的新型潜艇Fig.6 A new concept submarine design by Norway Ocean Technology Academe
1.2 三柱壳结构形式潜艇
美国海军在90年代中期成立了“未来潜艇研究小组(FSG)”,着力研究无人作战潜器和未来新型潜艇。FSG小组提出未来美国攻击型核潜艇应该配备比现役潜艇成倍增加的有效负载,而不应该以增加潜艇排水量来达到这个目标,其中一些概念方案已被美国海军确定为未来潜艇作战能力研究的重点方向。

图7 FSG研究组设想的扁平三耐压壳体潜艇Fig.7 A new concept submarine design by FSG
FSG提出的美国下一代多用途核潜艇[9]艇型呈扁平状,取消了指挥台围壳,在艇艏设有共形声纳基阵,艉操纵面上布置了两组垂直艉翼和方向舵。从图7上可以清晰地看到该概念潜艇为双壳体结构,耐压壳体采用了并列的三圆柱壳体结构形式。该潜艇突出的特点是在三个耐压壳体和非耐压壳体之间,携带大量的有效负载模块,武器发射系统全部外置,其攻击能力大大加强,且携带的UUV不受鱼雷发射管直径的限制。潜艇上设有6具武器弹夹装置,该装置用于武器的抛出式发射,以此来降低潜艇武器发射时的暴露率。潜艇上还配置有大型辅助运载器、通用化的载荷模块箱,包括探测传感器、通信节点、特种部队装备以及能源燃料等。在执行任务前,根据任务的需求,以不同的组合方式进行装载,并从母艇上控制负载的自动投放。
在2004年,美国海军和美国诺斯洛普格拉曼公司提出了两种非回转体艇型的潜艇[10],其中一型潜艇就是三耐压壳体潜艇(见图8),另一种是环形壳潜艇(见图14)。项目组对单耐压壳体、三耐压壳体、环形壳体潜艇的有效负载搭载、结构、水动力阻力以及操纵性等方面进行了对比研究。研究结果表明,非回转体艇型潜艇有效负载搭载、潜水海域航行等具有优势,但需要付出其它方面的代价。该型潜艇由并列三耐压壳组成,中间一个小耐压壳两边邻接两个大耐压壳,非耐压体在中间小耐压壳的上边和下边。对于传统载荷方案,鱼雷武器(水平负载)布置在中间壳体,前后并排设置两个鱼雷舱,垂直武器发射管(垂直负载)布置在两侧耐压壳内。该方案使得鱼雷武器布置更为复杂,两种负载在耐压壳内的空间利用率不高。对于模块化载荷方案,三耐压壳结构形式潜艇是最有利于水平与垂直有效负载的布置,其模块化垂直负载布置在围壳、潜艇艉部非耐压区域以及中间耐压壳专门的有效负载舱内,水平负载布置在模块化有效负载舱的底部,模块化有效负载舱与耐压结构分离并保持相对独立,同时在中间耐压壳有直径1.5m的UUV存放回收舱。耐压壳和主压载水舱结构均使用HY-100钢,其他非耐压结构、操纵面和可回收的艏舵采用了复合材料。三耐压壳潜艇采用两个导管推进器与“X”型操纵面,为提高潜艇水平面稳定性将围壳后置。

图8 美国提出非回转体三壳体潜艇及有效负载舱(左图为传统负载,右图为模块化负载)Fig.8 Non-body-of-revolution trihull submarine and payloads by the U.S.Navy and NGNN(The left figure is conventional payload,the right figure is modular payload)

表2 传统与非传统潜艇搭载不同负载的总体方案主要性能参数比较Tab.2 Comparison of the main characteristics and performances with conventional and modular payload

续表2
由研究结果分析可知,该艇型与结构形式使得潜艇具有较大有效负载的装载空间,而且由于其型宽较大,特别适合水平负载的搭载。而如果回转艇型潜艇要携带大负载,会导致潜艇直径、吃水或长度增加,影响其机动性。对于传统负载,由于其设计不是最佳状态,使得排水量、结构重量以及推进功率均有一定增加。对于大吨位的模块化有效负载,三耐压壳体与环形壳潜艇可以方便布置携带更多有效负载,但是总体来说,相同有效载荷百分比条件下,三柱壳方案比单耐压壳方案在排水量与推进功率有优势,环形壳方案比其他两个方案在单耐压壳方案在结构重量上有优势,而在排水量与推进功率方面表现出不足。
2010年荷兰提出了作为水下网络中心战斗体系中心节点的扁鱼型潜艇概念方案[11](图9),正常排水量为2 520t,总长约50 m,型宽16 m,型深6.5m,潜深250m,水下最高航速:20 kns,混合续航力12 000海里,AIP动力为水下柴油机,AIP航速6 kns,自持力50天(AIP水下自持力20天),武器16枚(10枚鱼雷,6具诱饵或防空导弹)。舷间搭载:探测浮标(50枚)、3具AUV、6具仿生机器人、1艘仿生运输艇、6具潜水装具与2艘湿式蛙人输送艇。

图9 荷兰提出的非并列三耐压壳潜艇Fig.9 Non-body-of-revolution trihull submarine design plan by Holland
潜艇横剖面为椭圆形的扁平艇体外形,该艇型有利于潜艇水面稳定性与坐底。由前后排列的三个耐压壳组成,其中前端为一个耐压壳,后端并排两个耐压壳,三个耐压壳直径为6 m。前端与后端耐压壳长度分别为12 m与27 m。前端耐压壳主要由鱼雷、诱饵以及AUV发射舱,指挥控制与情报侦查监测中心以及军官居住室组成。后端两耐压壳采用非对称布置,左舷耐压壳主要设有艇员与特种部队居住舱、AIP动力装置、液氧存储罐、电力推进装置,右舷耐压壳主要设有辅机与蓄电池舱、柴油发电机组与电力推进装置等。该结构布局有利于利用两耐压壳之间的空间存放蛙人潜水助推装具与湿式输送艇,同时可以利用艏部舷间搭载一些仿生运输艇与AUV。也可在耐压壳两边配有多用途发射舱,用于干式存放有效负载。探测浮标、仿生机器人、UUV可以向潜艇传输数据,同时可从潜艇上获得战术导航数据。
1999年,美国Arzola提出了种新颖的耐压结构布局潜艇[12],将潜艇一个耐压壳打断分为前后串列的两个耐压壳,将武器和新引入的多用途逃逸舱外置,并取消了指挥台围壳。多用途的逃逸舱弥补了单壳体潜艇储备浮力低的不足,在紧急情况下可以单独脱离潜艇上浮,可以大大增加潜艇艇员失事逃生的机会,并可以确保足够的空间来容纳所有艇员和一定数目的日常“来访者”。此外,舷外武器可以为潜艇提供一定的浮力。该潜艇前耐压壳主要为潜艇的指挥控制区、居住区以及蓄电池与淡水等存储区,后耐压壳主要为核动力装置及其辅机区,通过人员通道,艇员可以进出三个壳体区域,同时又保证了人员集中活动区、救生区与动力机械装置区的相互隔离,提高了潜艇的适居性与安全性。
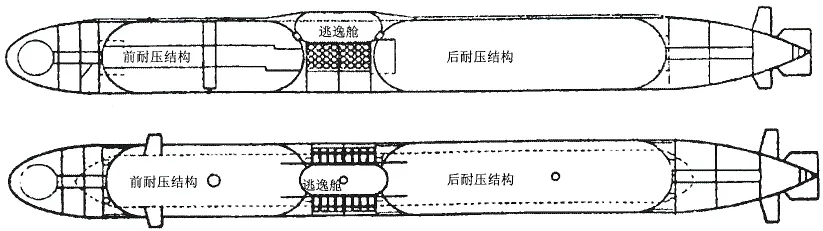
图10 美国提出的新型三耐压壳布局潜艇Fig.10 A new concept trihull submarine design plan by USA
1.3 多(大于三个)柱壳结构形式潜艇
多柱壳潜艇比较典型的是苏联的“台风级”(941型)核潜艇[13],它打破了世界各国潜艇传统设计思想,采用多个耐压柱壳结构的非传统艇型与结构潜艇。“台风级”潜艇是目前世界上排水量最大的潜艇,其正常排水量达24 500t,水下全排水量33 800t,最大下潜深度500m,主尺度长度170m×宽度23 m×高度11.5m,两座核反应堆,双主推进器。苏联设计建造的该型潜艇和以往核潜艇完全不同,横剖面近似为椭圆形,结构形式为四个大耐压柱壳,两个主耐压壳体并排布置。两耐压壳之间布置有导弹发射筒,耐压壳内部各装备一套主动力推进系统。在潜艇偏后主耐压结构上设一单独耐压结构为指挥舱,潜艇前部设一单独耐压结构作为鱼雷舱,上下耐压壳成品字形布置,所有的耐压结构通过非耐压结构固联。

图11 苏联941型核潜艇多柱壳结构图Fig.11 Typhoon class submarine multi-pressure-shells plans
采取这种结构型式是当时苏联潜艇设计上一大创新,使得当时设计人员解决了一系列复杂的设计难题,主要包括:满足了总体携带大量武器的的要求,消除了潜艇线型“龟背”现象,但是付出的代价是增大了排水量;解决了当时前苏联造船工业部门不能建造大直径耐压壳问题;保障了各功能舱室相对独立,为潜艇居住性、设备布置与维护创造了良好的条件;消除了潜艇在变深运动过程中因耐压船体变形而对导弹发射筒的影响;有利于采取备份措施以保证系统设备的可靠性,当两个耐压壳体中任一壳体内的设备发生事故时,仍然能够保证潜艇继续航行或作战,具有较高的作战和使用生命力。综合来看,941型核潜艇所采取的结构型式有利有弊,但是,不可否认在当时的确是潜艇设计上的一项大胆创新实践。目前,该潜艇6艘中已有5艘退役,仅保留一艘作为俄新一代“布拉瓦”弹道导弹试验平台,已不担负战斗巡逻任务。面对这些庞然大物的退役,该潜艇设计单位俄罗斯“红宝石”设计局也曾提出过多个对其改装另用的方案。其中,包括将其改装为水下运输船和铺缆船,由设计方案可以看到,设计师巧妙利用多体结构配置铺缆设备。

图12 “红宝石”设计局提出的水下铺缆船改装方案Fig.12 Underwater cable laying submarine modification plan for typhoon class submarine

图13 俄罗斯提出的水下钻井作业潜艇设计方案Fig.13 Underwater oil and gas drill operation submarine design plan
为了满足水下油气资源开采的需求,俄罗斯“天青石”设计局提出了水下钻井作业潜艇设计方案[14]。该平台总长98.6m,型宽31.2m,型深32.5m,正常排水量23 000t,工作深度60~400m,自持力60天,最大钻井深度6 000m。相对于现在的海上油气开采方式来说,该水下钻井作业潜艇开采方式可以显著减小钻井装置的尺寸和重量,保证了密闭舱室内的防爆性和钻井作业的机械化,免除了钻井工人的重体力劳动,实现了远程控制及作业工艺的完全监控。该钻井作业潜艇由多个耐压柱壳结构并分为五大模块组成,该结构形式有利于将潜艇控制居住、钻井与动力布置在独立的耐压壳模块内,并在相应模块舱内配有备份的控制柜,以提高潜艇的可靠性与水下钻井作业人员的安全性,设计十分巧妙新颖。
在潜艇艏部,潜艇动力、钻井控制设备与艇员生活居住设施集中布置在一个耐压壳体内,构成潜艇操控居住模块舱。钻井设备集中布置在在艇舯部和两舷三个耐压壳内:潜艇舯部为钻井模块舱,舱内配有旋转式钻井设备,用于起吊安装套管和钻井管的设备以及钻井管的储存室,全套套管可打一口深3 500m的四管钻井;左右两侧耐压壳内为钻井配套模块舱,分别配有钻井液分离与循环系统、防井喷设备与灌浆系统等设备,两舷模块舱均配有电力推进系统。在连接操控居住舱与钻井舱的潜艇艏部设有一垂直耐压壳体,为安全逃生舱,可以用于艇员的避难脱险,正常情况下可用于艇员与外部人员换班及给养补充。该艇艏部的操控居住舱之上配有一型潜艇救生艇。潜艇艇艉底部的耐压壳内为蓄电池与柴油机发电机模块舱。潜艇艇艉顶部为若干转运补给模块舱,为用于接收转运钻井装置所需的套管、水泥及化学试剂等各种耗材,通过该舱转运到水下钻井潜艇的钻井模块舱内。
1.4 环形耐压壳结构形式潜艇
2004年,美国海军和美国诺斯洛普格拉曼公司提出了环形壳结构形式的潜艇[10]。该型潜艇的耐压壳形状像一个花盆底托,环形壳潜艇通过非耐压结构包络来改善其水动力线型。与其他艇型的潜艇相比较,环形壳潜艇具有更短艇长与更大的型宽。图14展示了环形壳潜艇的耐压壳、非耐压壳及其环状负载区。
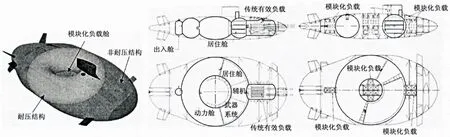
图14 环形壳潜艇艇型结构与负载概念方案图(中图为传统负载,右图为模块化负载)Fig.14 Toroid shell submarine and payloads plans(The middle figure is conventional payload,the right figure is modular payload)
针对传统负载方案,为了解决环形壳潜艇鱼雷武器尺寸较长的问题,在艇艏部连接环形壳向前延伸出一个独立的耐压壳作为鱼雷舱,鱼雷舱附近舷外配置垂直武器负载。同时,为了提高中间区域的空间利用率,不减少环形壳的尺寸,环形壳中间区域上下用椭圆形结构做成耐压壳舱室,用来布置核反应堆装置,在艇艉设置人员出入设闸舱。对于模块化负载方案,潜艇艏部太短,不能布置水平负载,解决的方法是在环形壳中心非耐压区域布置模块化水平与垂直负载,并加大环形耐压壳的尺寸以便于动力系统的布置,同时在潜艇艏艉端与围壳非耐压区布置垂直负载,由于艇艉推进系统的存在使得无法设置UUV存储回收舱。采用双泵喷推进器,以及可伸缩式艏舵与“X”型艉操纵面。
1.5 多球壳结构形式潜艇
10831型深海作业核动力潜艇由“孔雀石”设计局设计,北约名称代号为Norsub-5。目前已知建成1艘,代号为AS-12。该潜艇1988年开工建造,1990年由于资金等方面原因中途停建,后来几经波折,在2000年后得以恢复建造。潜艇的潜深为3 000m(也有资料认为其潜深达6 000m),正常排水量1 600t(水下排水量2 100t)、主尺度为79 m×7 m×5.1m,最大航速30 kns,装载一座额定功率为15 000马力的核反应堆,单轴单桨推进,可长时间在水下执行作业任务,该型潜艇编制为25人。有国外一些文献资料猜想分析了10831型核动力潜艇的技术特征,有报道称该型潜艇[15]其耐压壳体由数个球壳串联组成,所有球壳之间有通道相连,壳体材料为高强度钛合金,耐压壳体外由轻外壳包覆成流线型外型。潜艇每一个耐压壳为一相对独立的功能舱室,设有武器舱、控制舱、辅机舱、柴油机及其辅机舱、主机舱、反应堆舱,配置有单螺旋桨与2台辅助推进装置。潜艇舱室内配置水、空气再生系统,大大改善了潜艇的居住条件。该型潜艇搭载有机械手、岩石清理设备、电视抓斗和水压管等水下作业工具。该潜艇在中期维修过程中升级了部分设备,加装了探测海底地震形成的断面的水声测量装备、测量海底沉积物深度的轮廓测定仪、侧扫声纳和多射线回声测深仪等设备。有资料认为其曾用于北冰洋海底地形地貌等地质学勘探与海洋油气与矿产资源的勘探。关于10831型深海作业核动力潜艇的公开信息很少,这里给出一些对该潜艇猜测设想的不同艇型与结构形式方案的示意图。

图15 国外猜想10831型潜艇的内部结构与艇型方案示意图(上图六球壳,下图七球壳)Fig.15 10831 class submarine’s multi-sphere shells plans by speculation(six and seven spheres)

图16 国外猜想10831型潜艇八球壳的内部结构与艇型方案示意图Fig.16 10831 class submarine’s multi-sphere shells plans by speculation(eight spheres)
美国帕格里斯(W.N.Pugliese)和丁克尔(J.L.Tinkel)撰文披露了2010年将要建造的隐身潜艇雏形[16],该新型潜艇具有纺锤体流线线型,其耐压壳体设计成一串大小不同的球体,武器设置在舷间,为了取得良好的隐身和阻力性能,围壳和艏舵设计成可回收形式,其轻外壳外表面安装共形声纳,并覆盖吸声材料。研究表明,球体相对于圆柱体的目标强度有较大降低。基于此种结论,通过减少突体,并将柱体耐压结构改变为链球状结构等设计上的改变,可使其TS值降低20 dB,作者称该潜艇方案是革命性的创新设计。
为了提高潜艇搭载负载与耐压结构的抗压能力,有利于特殊的军事用途,美国提出了一型横剖面为椭圆型、纵向为流线型的蝶形的潜艇[17],其耐压壳采用多个交贯连接的球型壳体,呈蜂窝状,设计时可根据需要灵活改变球形耐压壳的数量和大小,该潜艇结构形式新颖,脱离了传统的球壳和圆柱壳耐压形式。艉部装有双推进器,低矮围壳与艉部操纵面采用一体化共形设计,有利于潜艇航行性能与隐身性能的提高。该潜艇最大潜深可达762m,结构布置见图18。该潜艇长19.35m,型宽10.11m,型深4.70m,排水量365t,水下最大航速15 kns,可负载5吨设备,配备了试验舱与人员出入代换舱。1994年,美国Clifford Ness对于该潜艇的结构形式还申请了专利[18]。有资料表明,美国已经设计建造了相关的试验艇。

图17 未来隐身潜艇的概念图像Fig.17 A new concept submarine design plan in future

图18 美国提出的多交贯连接球型壳体结构新型潜艇Fig.18 Multi-sphere shells connection hullform submarine design plan by USA
对于多球壳这种典型的结构形式,在潜水器中应用比较广泛,如美国的Mystic、Avalon深潜救生艇(DSRV)和日本的“千寻”号深潜救生艇[19],其深潜救生艇的艇体布置如图19所示,其耐压壳由前部的操纵舱,舯部的救生舱及后部的机舱组成的3个串联球与救生舱下部的半球状的救生闸套所构成,球壳之间可以相互连通。该结构形式能够提高救生艇的救援深度、救援能力以及救援功能的实现具有一定优势。日本海上自卫队的深潜救生艇是由海上自卫队技术研究部研究开发,排水量约40 t,全长12.4m,宽3.2m。机组人员2人,可救人员12人,最大下潜深度300m,速度4 kns。美国深潜救生艇可全球投送,排水量约34.5t,全长12.4m,宽3.2m,可救人员24人,最大救援深度610m。另外,日本川崎重工船厂于1968年设计建造了Shinkai HU06载人潜水器,正常排水量85 t,工作潜深600m,携带机械手及探测设备,主要用于海洋科学研究,其值得关注的是其很具特点的结构形式,主要耐压结构为两个球壳,两个球壳之间通过耐压圆柱壳作为通道连接。

图19 美国深潜救生艇(DSRV)与三球结构形式Fig.19 Deep submersible rescue vehicle and three sphere shells hullform

图20 日本深潜救生艇(DSRV,左图与中图)与深海HU06载人潜水器(右图)Fig.20 Japan’s Deep submersible rescue vehicle and ShinkaiHU06 submersible
2 非传统潜艇的技术发展方向与特点分析
(1)突破传统潜艇设计思路的新概念潜艇已成为未来潜艇技术发展的重要方向之一
主流传统潜艇发展已经有一百多年的历史,回转艇型单耐压壳的传统潜艇在总体布局、船体结构、水动力性能等方面的设计技术已经比较成熟,而传统潜艇有其自身的特点,在某些方面有一定的局限性,由此导致潜艇艇用设备的发展模式已经固化,难有新的突破。非传统潜艇对大深度潜深、浅水水域航行、多功能作业模块搭载等有其独特适应优势,为潜艇隐身技术措施应用、声纳与武器携带提供了新的设计思路与设计要求,因此,非传统潜艇总体设计的改变,由此带动系统设备打破原有框架以寻求新的发展。跟踪国外的研究动态表明,世界上几大潜艇强国均在致力于新型非传统潜艇的设计研究,非传统潜艇已成为未来潜艇技术发展的重要方向之一。
(2)非传统潜艇为潜艇总体设计提供了更丰富多样的可调设计空间
比较传统潜艇而言,非传统潜艇打破了单耐压壳结构形式的固有模式的约束,使得设计人员有更多施展设计想法的空间,具有更多设计的可调性。潜艇的结构形式完全由设计意图决定,以适应总体任务要求而搭载的作业模块进行不同耐压结构组合设计。由于大量负载布置在舷间,负载搭载方式、配置参数以及与舱内物资与信息的对接等更加灵活多样。可以根据不同功能需求的总体分舱布局、不同的安全等级与舱室环境要求进行差异化设计,可以为负载搭载、整舱逃逸、折倒升降桅杆、减振降噪措施等新技术应用提供了更好的条件。
(3)充分利用非传统潜艇独特的技术特征以发展适应特殊任务需求
非传统潜艇具有排水量较大、结构复杂等不利方面,可以通过设计与建造技术的发展,削弱并解决这些技术问题,而且排水量对于非作战潜艇不是一个严格追求的设计技术指标。而非传统潜艇适合近水面、浅水海域航行,由于其运动稳定性较好,非常适合水下作业。同时,非传统潜艇可以携带多个不同种类的作业模块,更能适应大潜深、模块化等技术需求,多耐压壳可设计成相对独立有联系的功能模块舱,为潜艇安全性、作业功能实现与负载搭载能力提升有重要的现实意义。
3 非传统潜艇需要解决的关键技术
(1)适应于特殊任务需求的总体设计技术
潜艇总体设计是权衡优化各方面性能参数的复杂过程,无论传统或非传统艇型及结构的潜艇,有其自身特有的优缺点,表现出不同技术特征。在非传统潜艇设计过程中,总体设计理念需要不断创新,倡导新技术推动作用并与潜艇总体设计相融合,充分利用并挖掘非传统潜艇的技术优点。在潜艇总体顶层设计阶段,提出新的技术途径以解决潜艇各类矛盾,综合研究各系统适应性,提出潜艇系统与设备的总体设计要求。非传统潜艇的总体设计主要涉及总体设计理念创新、总体布局方案的创新、总体设计方法、设计规范体系等方面的创新。
(2)复杂耐压壳及连接结构设计与安全性评估技术
非传统潜艇为不同结构形式的组合,通过非耐压结构连接在一起。而多耐压结构之间存在通道与穿舱结构,水下大深度机动变化还会引起结构变形。同时,为了满足水下特殊作业需求,载荷模块需要在舷外设置一些特殊结构,打破了潜艇结构的连续性。由此可知,相对于传统潜艇而言,其结构形式与力学特征更为复杂,结构设计缺乏相应的指导规范。要保障非传统潜艇的结构水下安全性,要突破包括大潜深非传统潜艇结构优化设计与安全性评估技术、耐压壳及连接结构变形协调控制技术,多耐压体通道与穿舱设计、载荷模块特殊结构设计技术、复杂结构建造工艺技术以及结构安全性试验评估技术等关键技术。
(3)非回转艇型水动力性能综合优化设计技术
目前潜艇水动力技术研究针对单轴/单桨/水滴型潜艇典型艇型进行研究,而非传统潜艇采用非常规隐身外形、多元推进方式与不同的操纵面布局,取消或者采用低矮指挥台围壳。同时,非传统潜艇需要执行不同的特种作业任务,航行海域环境更为复杂,要求潜艇具有更为灵活机动的推进操控能力,由此带来一系列新的水动力技术问题需要研究。非传统艇型潜艇水动力性能综合优化设计技术研究主要包括非传统艇型潜艇水动力性能预报方法、水动力布局优化技术、复杂海洋环境潜艇航行性能分析技术、执行特种作业工况的非传统潜艇操控技术、减阻增效新技术以及试验验证技术。
(4)非传统潜艇载荷模块与总体适应性设计技术
研究表明,非传统潜艇可以搭载各种不同类型的载荷模块,可以提升潜艇负载能力,提供更丰富的总体设计可调性。一方面新技术载荷模块推动了非传统潜艇技术的发展,另一方面,非传统潜艇为载荷模块提供更有利的适应性。因此,非传统潜艇载荷模块相关技术是一个研究的重点关键技术之一,需要在新型载荷模块的设计技术、载荷模块的存储/布放回收技术、总体对载荷模块的协同控制技术、载荷模块信息交换与能量供给等技术方向取得一定的实质性研究进展。
4 结 语
潜艇技术发展至今,水滴型单耐压壳传统潜艇技术发展已经日趋成熟,而非常规潜艇的发展,为潜艇设计人员提供了更加开阔的设计思路与设计可调空间,能够适应大纵深海域、多任务模块、艇内对舷外灵活操控、水下大范围机动信息获取与交换等技术需求。研究目前各国水下技术的发展动态表明,随着水下作业与探测等技术的不断发展,目前,世界上许多国家正在积极开展非传统潜艇的相关技术研究,有的已经开始尝试在水下进行前期的试验验证,由此可见,非传统艇型及结构潜艇将成为未来潜艇技术发展的一个重要方向。
[1]Roddy R F,Curphey R M,Delaney K P,Ebert M P,Hess D E,Faller W E.Advances in understanding of maneuvering characteristics for non-body-of-revolution submersibles[C]//27th Symposium on Naval Hydrodynamics,5-10October2008.Seoul,Korea,2008.
[2]Roddy R F,El-Taher D J,Hess D E,Junghans K A,Li Jiang.An investigation into the performance of non-body-of-revolution submarines?DTMB Series 66[C]//28th Symposium on Naval Hydrodynamics,12-17September2010.Pasadena, California,2010.
[3]Imber R,Rogers E,Abramson J.Initial experimental evaluation of a circulation controlled sail on a submersible vehicle for enhanced maneuverability[D].Technical Report,Naval Air Warfare Center Aircraft Division,14 March2007.
[4]Delaney K P.Computational investigation of the DTMB Series 66 hull forms[C]//29th AIAA Applied Aerodynamics Conference,27-30June2011.Honolulu,Hawaii,2011.
[5]http://cyberneticzoo.com/tag/submarine-exploring-armor/page/5/[J/OL].
[6]Chin Justin,Davy Hansch,Nate Lambeth,Chris Michie,Dave Owens,Solomon Whalen.Design report littoral warfare submarine(SSLW)[D].VT Total Ship Systems Engineering,Virginia Tech Ocean Engineering Team SCRAP,2005.
[7]Marie NICOD.SMX-26,The Invisible threat to control extreme shallow waters[C].UDT2013,DCNS-France,2013.
[8]王 源.科学家研制载人潜艇可在极端条件下潜入深海[J].科技视界,2011(32):20-20. Wang Yuan.Scientist will develop a new submarine which can navigate in deep sea[J].Science and Technology Vision,2011(32):20-20
[9]Mark Hewish.Submarines to cast off their shackles,Take on New Roles[C].International Defense Review-March01, 2002.
[10]Nagy D,Fister J P.An evaluation of the merits of non-body of revolution submarine hullforms[C].Warship2005.
[11]Prins C A,Versteeg N,Breen P C,Simons D G,Wilgenhof J D,et al.REACH a submerged remote sensing reconnaissance system[C].DUCK.
[12]Arzola J.New submarine design[J].Naval Engineers Journal,1999(7):118-120.
[13]汪 玉,姚耀中.世界海军潜艇[M].北京:国防工业出版社,2006:315-318.
[14]Lavkovsky S A.Construction and operation of underwater oil&gas fields with the use of submarine drill ships,robotized support vessels and underwater vehicles for installation,replacement and servicing of underwater equipment[C].Complex Innovation Technologies Ltd.,Moscow,2010.
[15]施 征.深藏6 000m俄罗斯210核潜艇[J].兵器知识,2014(5):75-77. Shi Zheng.210class nuclear submarine diving depth of which is6 000m[J].Ordnance Knowledge,2014(5):75-77.
[16]2010年世界舰船装备与技术发展报告[D].北京:中国船舶重工集团公司,2011:71-72. The report on development of ship equipment and technology in2010all over the word[D].Beijing:China Ship Building Industry Corporation,2011:71-72.
[17]苏红宇.新型潜艇设计概念[J].船舶工业技术经济信息,2001(4):36-36. Su Hongyu.A new concept submarine design[J].Technology and Economy Information of Shipbuilding Industry,2001(4):36-36.
[18]Clifford Ness C.High Strength,High safety submersible vesselresistantto extreme externalpressures[P].1994.
[19]侯恕萍,严浙平.深潜救生艇的现状及发展趋势[J].船舶工程,2004,26(4):1-6.Hou Shuping,Yan Zheping.State-of-Art and development trend of deep submarine rescue vehicle(DSRV)[J].Ship Engineering,2004,26(4):1-6.
Investigation on technical development status and general design ideas for non-body of revolution and new-type structure submarines
PENG Liang-bin,WU You-sheng,SIMa can,MA Xiang-neng,CAO Hai-bin,ZHOU Nian-fu
(State Key Laboratory of Deep-sea Manned Vehicles,China Ship Scientific Research Center,Wuxi 214082,China)
Non-body-of-revolution and new-type structure submarines are beneficial to release implement kinds of operation payload modules,and more and more new submarine design ideas were put forward.This paper introduces the technology development in detail of non-body of revolution and new-type structure submarines,and expounds the unique advantages of non-tradition submarine in deep submergence,shallow water navigation and outboard space utilization.And the technical characteristics of nontraditional submarines and developmentdirection are discussed,and the new concept of submarines need to address the key technologies is analyzed.Finally,the author gives some preliminary conclusions and opinions.
nontraditionalsubmarines;shape and structure;special operation tasks;payload module
U661.1
A
10.3969/j.issn.1007-7294.2017.07.014
1007-7294(2017)07-0914-15
2017-03-08
彭亮斌(1982-),男,博士研究生,高级工程师,E-mail:pinlianb@163.com;
吴有生(1942-),男,研究员,博士生导师,工程院院士。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
减速顶与调速技术(2022年3期)2022-02-11
舰船科学技术(2021年12期)2021-03-29
天津外国语大学学报(2020年4期)2020-08-24
石油化工建设(2019年6期)2020-01-16
中国特种设备安全(2019年9期)2019-12-03
制造技术与机床(2019年4期)2019-04-04
汽车与新动力(2018年2期)2018-05-09
广东技术师范大学学报(2016年5期)2016-08-22
焊接(2016年2期)2016-02-27