
基于避障切换控制的移动机器人路径规划
2017-07-31 18:47方健飞葛琳琳
辽宁石油化工大学学报 2017年4期
方健飞, 张 威, 葛琳琳
(辽宁石油化工大学 计算机与通信工程学院,辽宁 抚顺 113001)
基于避障切换控制的移动机器人路径规划
方健飞, 张 威, 葛琳琳
(辽宁石油化工大学 计算机与通信工程学院,辽宁 抚顺 113001)
移动机器人能够感知周围的环境,并能够实时的规划路径到达目标点,其中避碍问题是研究的热点。设计了一种在没有详细的环境信息的情况下,移动机器人避障过程中路径规划转换的控制方案,该方案机器人可以根据运动跟踪模式、避障模式及机器人状态选择逐渐逼近目标点,在尽可能出现的任何形状障碍物情况下用Matlab软件仿真实验。 实验结果表明,提出的自适应路径规划控制方案的有效性。
切换控制; 运动跟踪模式; 避障模式; 路径规划; Matlab仿真
近年来,自主汽车式机器人的设计因其潜在的应用价值在汽车工业和机器人领域得到广泛关注,机器人的自主性取决于它探索未知环境的能力,涉及如停车、导航、轨迹跟踪、屏障/路径检测及目标跟踪等许多不同的研究领域[1-2]。目前,移动机器人通过提供避免碰撞、减少交通阻塞、代替人类执行危险任务等技术来提高人们的生活质量[3-4],以避障为目标的路径规划是移动机器人导航的关键问题之一,也是本文的主要研究方向。
通常,路径规划分为全局路径规划和局部路径规划两大类:一方面,在全局路径规划中,可以获得机器人工作空间的先验知识,文献[5]通过最短路径准则设计了最优路径,应用一些优化方法来解决最优路径的问题;另一方面,局部路径规划方法采用超声波传感器、激光测距仪及车载视觉系统来获得环境信息,进而在线进行路径规划[6]。本文假设移动人的导航空间是未知的,并且只有固定的障碍物,并在没有详细的环境信息前提下,设计移动机器人避障的路径规划控制转换方案。
1 系统描述
非完整约束移动机器人的动力学描述如图1[2]所示。非完整约束移动机器人是由安装在同一轴上的两个驱动轮和一个机械转向轮组成的小车,机械转向轮起到被动自调节的支撑作用,其运动和转向分别由两个电机独立控制。假设移动机器人由刚性不易变形的轮子组成,则只能在同一平面上移动,两个驱动轮之间的距离为2b,两个轮子的半径相同,均为r,P点为机器人运行的直线方向和机器人中心点C连线与驱动轮轴的交点。机器人的移动由P点的位置来表示,机器人在全局坐标系{O,U,V}的位置可以由(u,v,θ)来表示,其中u和v为P点在全局坐标系中的坐标。由图1可知,变量θ表示由安装在机器人平台上的测量出在局部坐标系{P,X,Y}中与水平轴的夹角。考虑到移动机器人在滚动、非平移条件下运行,所以移动机器人只能是沿着驱动轮的轴线方向运行,因此这个假设确定了一个非完整约束的机器人以下面的形式运动:

(1)
在全局坐标系中,移动机器人的动力学模型表示为:
(2)
式中, vl和vr分别为左轮和右轮的线速度,它们的值小于最大速度vmax[7-12]。本文所研究的控制问题是为找到一个驱动移动机器人安全到达目标点而产
生的一个参考路径轨迹的合适路径规划。

图1 非完整约束移动机器人的动力学描述
2 转换路径规划控制
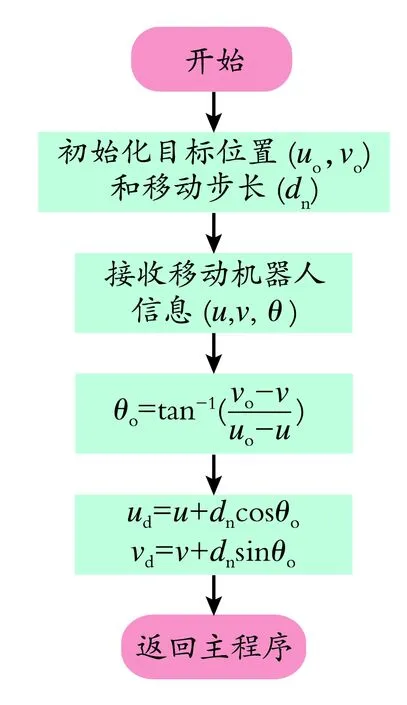
为了在不同的环境下,对非完整约束移动机器人的安全运行进行有效的处理,提出了机器人根据状态来控制转换路径的规划模式,包括运动跟踪模式、避障模式、自旋转模式。转换路径规划控制的主流程如图2所示。

图2 转换路径规划控制的主流程

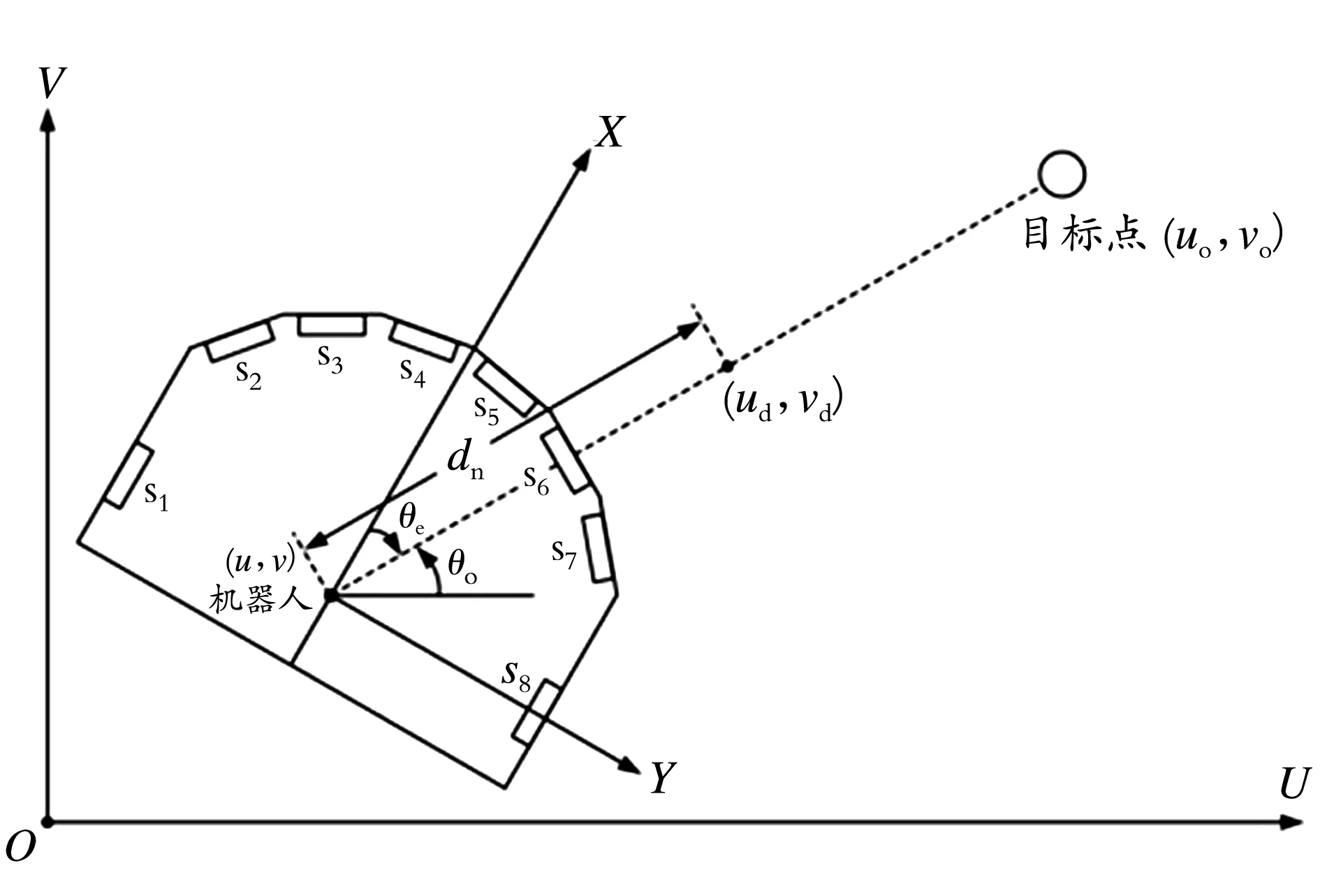
(a) 运动跟踪模式运行图
(b) 运动跟踪模式流程图3 运动跟踪模式
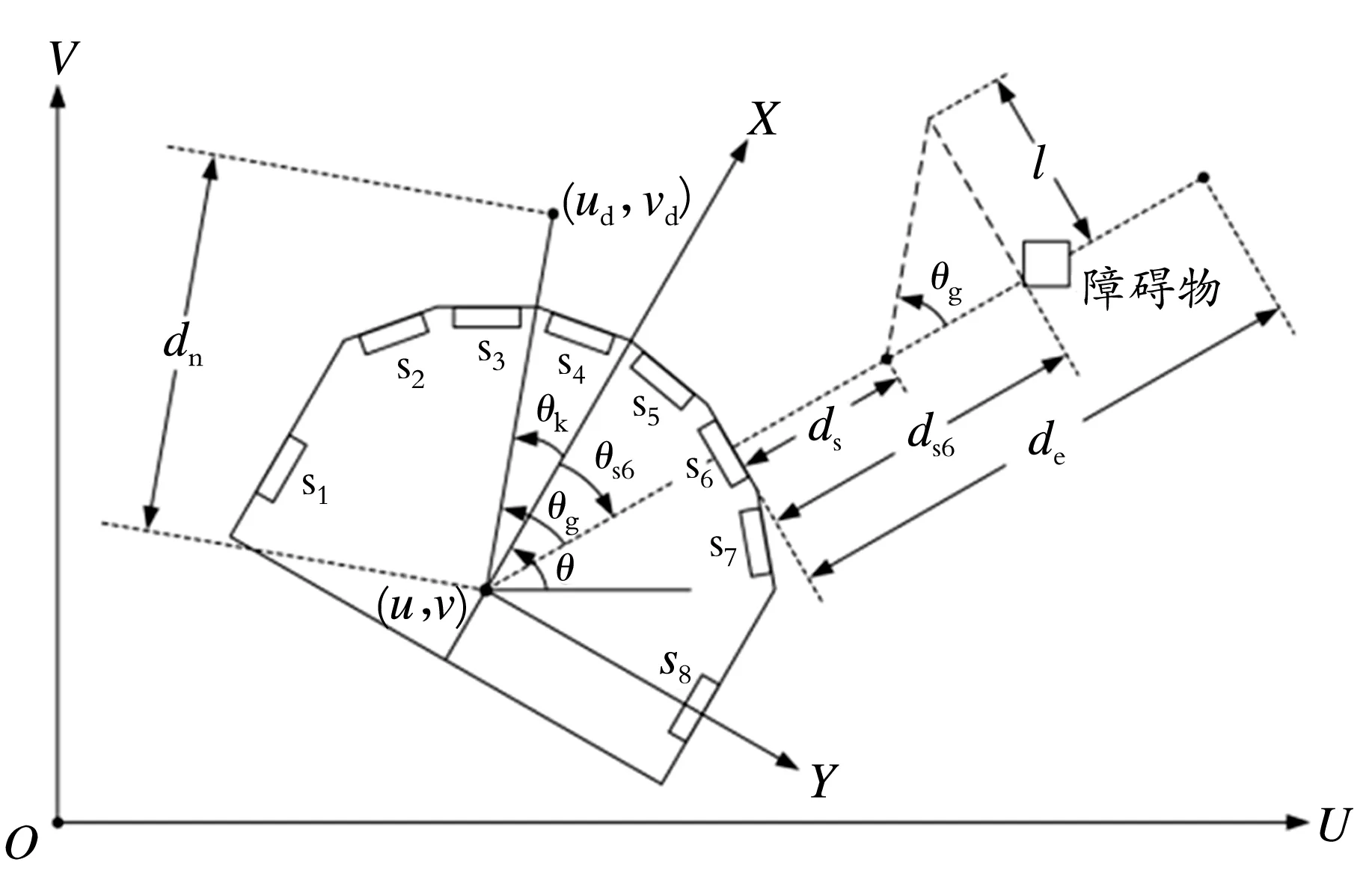
(a) 避障模式运行图

(b) 避障模式流程图4 避障模式
由图4可知,机器人的位置控制是通过所提出的转换路径规划控制方案来完成,由适当的左轮和右轮的线速度跟踪产生的参考轨迹来操控机器人,它可以是比例-积分(PI)控制器、模糊逻辑控制器或神经网络控制器。本文使用传统的比例-积分控制方案。
为了区分机器人在运动中的运行情况,目标位置和机器人之间的距离dro定义为:
(3)
距离dro的变化存在两种情况:一种情况,在与过去的距离比较之后,当前的距离为最小,意味着机器人正在接近目标位置;另一种情况,在与过去的距离比较之后,当前的距离不是最小,则意味着机器人由于避障模式的操作,正在远离目标点。
3 仿真实验
本文使用差分驱动的移动机器人来验证所提控制方案的有效性,该移动机器人的详细参数为:r=0.092 5m,b=0.167m,vmax=0.4m/s,θs1=-90°,θs2=-50°,θs3=-30°,θs4=-10°,θs5=10°,θs6=30°,θs7=50°,θs8=90°。
此外,在转换路径规划控制中的控制参数为:dn=0.04m,l=0.1m,Δt=0.1s,vc=0.04m/s。其中,dn为机器人移动步长;l为避障半径;Δt为采样时间;vc为机器人中心点的线速度。以上各个参数是在考虑数值仿真和实验结果能够获得最佳瞬态控制性能的工作条件下选择的。
所有的数值仿真通过Matlab软件计算。在仿真过程中,选择4种形状类型的障碍物来测试所提出的控制方案的适应性。在不同障碍物下所有转换路径规划控制方案的数值仿真如图5所示。

(a) 正方形障碍物
(b) U形障碍物
(c) 混乱迷宫障碍物

(d) 不同形状障碍物图5 不同障碍物下所有转换路径规划控制方案的数值仿真
由图5(a)可知,在4个方形障碍物和3个初始位置(u=1.5,v=1.0),(u=3.0,v=1.0)和(u=4.0,v=2.8)及目标位置 (uo=3.0,vo=5.5)时移动机器人的响应情况,移动机器人可以在不同的初始位置成功地绕过障碍物到达目标点。
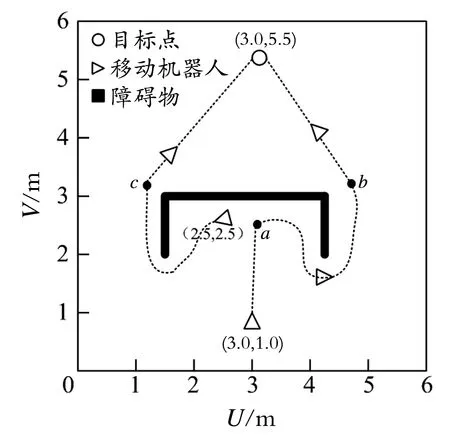
由图5(b)可知,在U形障碍物和2个初始位置(u=3.0,v=1.0)和(u=2.5,v=2.5)及目标位置在(uo=3.0,vo=5.5)时移动机器人的响应情况;在第1个初始位置(u=3.0,v=1.0)时,最初机器人处于运动跟踪模式直接向目标点移动,直到到达“a”点机器人检测到正前方的障碍物,然后,根据避障模式进行右转到达“b”点,当机器人处于“b”点时,机器人的状态为rs=1,和以前的距离进行比较后,当前的距离dro为最小,所以,机器人转入运动跟踪模式向目标移动;在第2个初始位置(u=2.5,v=2.5)时,机器人在避障模式下向“c”点移动,当机器人到达“c”点后,机器人的状态为rs=1,和以前的距离进行比较后,当前的距离dro为最小,所以,机器人转入运动跟踪模式向目标移动。
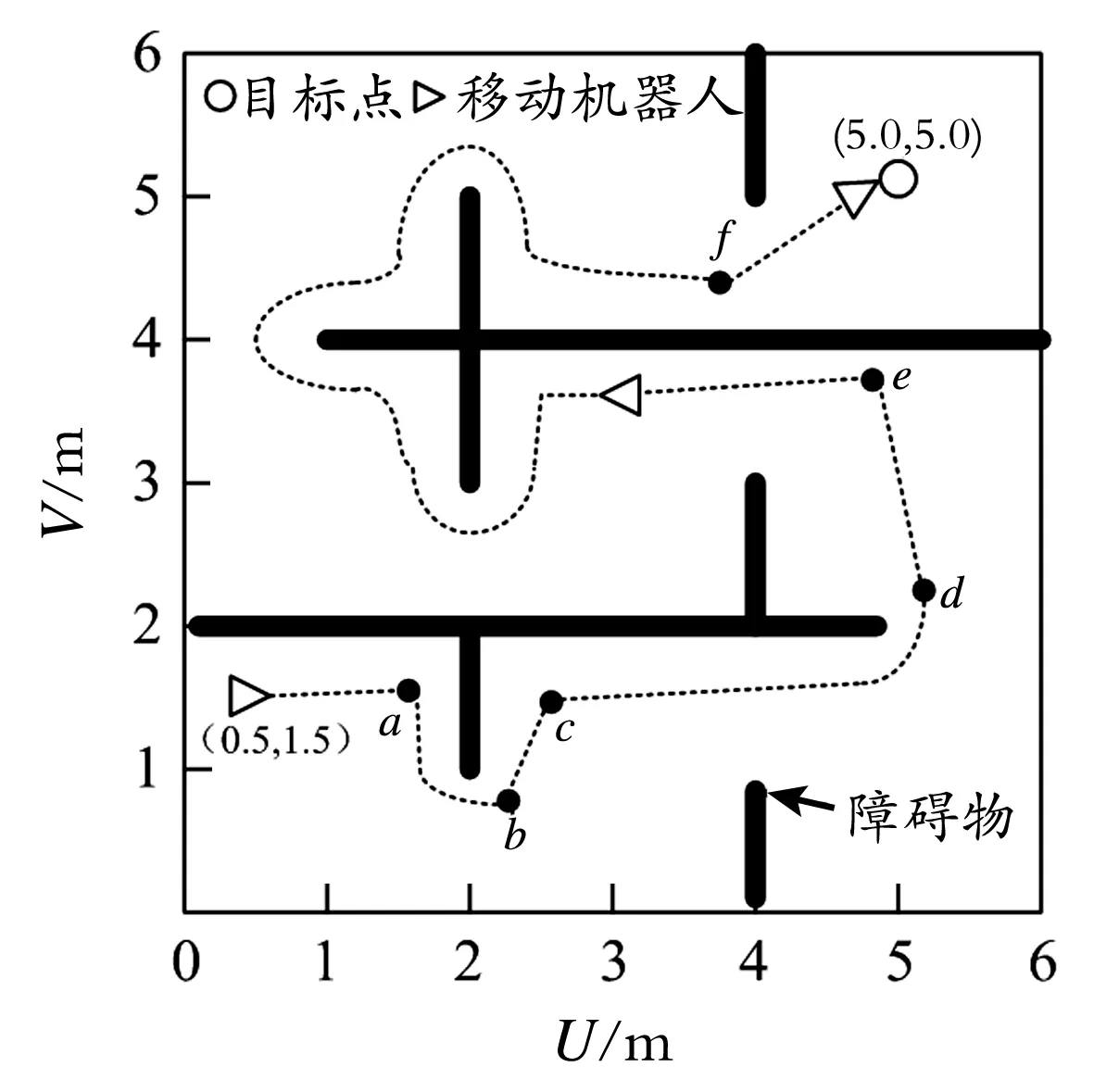
由图5(c)可知,在混乱迷宫中,目标位置在(uo=5.0,vo=5.0)时移动机器人的响应情况;机器人由初始位置(u=0.5,v=1.5)开始在避障模式下移动到“a”点,在“a”点,机器人的状态为rs=0,并且和以前的距离进行比较后,当前的距离dro为最小,所以,根据避障模式,机器人进行右转,直到机器人到达“b”点,因为“b”点与目标点的距离比“a”点与目标点的距离小,并且,此时机器人的状态为rs=1,机器人则在运动跟踪模式下向“c”点运动,当机器人通过“c”点后,机器人的状态为rs=0,和以前的距离进行比较后,当前的距离dro为最小,则转换到避障模式到达“d”点,此时,在机器人的周围没有障碍物,并且从“d”点到“e”点的直线距离最小,所以机器人在运动跟踪模式下直接向目标点移动到“e”点,当机器人通过“e”点时检测到前方的障碍物,便转换到避障模式下向“f”点移动,当机器人到达“f”点时,机器人的状态为rs=1,和以前的距离进行比较后,当前点与目标点的距离dro最小,所以机器人在运动跟踪模式下直接向目标点移动。
由图5(d)可知,在不同形状的障碍物中,目标位置在(uo=5.0,vo=5.0)时移动机器人的响应情况,从最初的状态开始,机器人可以成功地通过不同形状的障碍物到达目标点。
4 结 论
研究了移动机器人避障的转换路径规划的控制方案,该方案在不需要详细的环境信息情况下,通过机器人在运行过程中的状态及周围环境,自主决定在运动跟踪模式和避障模式之间进行切换。实验结果验证了转换路径规划控制方案的有效性。
移动机器人在长时间的避障转换路径规划过程中,会导致机器人的动力系统模型误差及超声波测量误差的积累,使路径规划的误差增加。为了减小移动机器人在长时间避障转换路径规划的误差,提高其实用性,在控制算法中增加机器人的动力系统模型误差及超声波测量误差的积累补偿与校正是未来的工作的重点。然而,当前算法可以在实验室中精确用于移动机器人在任何未知的复杂环境下的避障转换。
[1] 葛琳琳.模糊控制在布料小车定位系统中的应用[J].辽宁石油化工大学学报,2014,34(5):52-56.
[2] 孙凤山,张威,葛琳琳.移动机器人在未知环境中避障的控制策略[J].辽宁石油化工大学学报,2016,36(4):69-72.
[3] 葛琳琳,张威.轮式机器人航向定位的控制策略[J].电子设计工程,2015,23(9):171-174.
[4] 葛琳琳,张威.基于ARM的危险品搬运机器人的设计与实现[J].电子设计工程,2014,22(20):178-180.
[5]LiQ,ZhangW,YinY,etal.Animprovedgeneticalgorithmofoptimumpathplanningformobilerobots[C]//IntelligentSystemsDesignandApplications, 2006.ISDA'06.SixthInternationalConferenceon.IEEE, 2006, 2: 637-642.
[6]MariottiniGL,OrioloG,PrattichizzoD.Image-basedvisualservoingfornonholonomicmobilerobotsusingepipolargeometry[J].IEEETransactionsonRobotics, 2007, 23(1): 87-100.
[7]MotlaghORE,HongTS,IsmailN.Developmentofanewminimumavoidancesystemforabehavior-basedmobilerobot[J].FuzzySetsandSystems, 2009, 160(13): 1929-1946.
[8]GreggioN,MenegattiE,SilvestriG,etal.Simulationofsmallhumanoidrobotsforsoccerdomain[J].JournaloftheFranklinInstitute, 2009, 346(5): 500-519.
[9]SchutteAD.Permissiblecontrolofgeneralconstrainedmechanicalsystems[J].JournaloftheFranklinInstitute, 2010, 347(1): 208-227.
[10] Defoort M, Floquet T, Kokosy A, et al. Sliding-mode formation control for cooperative autonomous mobile robots[J]. IEEE Transactions on Industrial Electronics, 2008, 55(11): 3944-3953.
[11] Tsui W, Masmoudi M S, Karray F, et al. Soft-computing-based embedded design of an intelligent wall/lane-following vehicle[J]. IEEE/ASME Transactions on Mechatronics, 2008, 13(1): 125-135.
[12] Chueh M, Yeung Y L W A, Lei K P C, et al. Following controller for autonomous mobile robots using behavioral cues[J]. IEEE Transactions on Industrial Electronics, 2008, 55(8): 3124-3132.
(编辑 陈 雷)
Path Planning of Mobile Robot Based on Obstacle Avoidance Switching Control
Fang Jianfei, Zhang Wei, Ge Linlin
(SchoolofComputerandCommunicationEngineering,LiaoningShihuaUniversity,FushunLiaoning113001,China)
The mobile robot can sense the surrounding environment,and can plan the path to reach the target point in real time, among which the obstacle avoidance problem is the focus of the research. A control scheme for path planning transformation of mobile robot in obstacle avoidance without detailed environmental information is designed.In this scheme,the robot can according to the motion tracking mode,obstacle avoidance model and robot state gradually approaching the target,using the Matlab simulation experiment in any shape obstacles as far as possible. The obstacle experiment verifies the effectiveness of the adaptive path planning control scheme is proposed.
Switch control; Motion tracking mode; Obstacle avoidance mode; Path planning; Matlab simulation
1672-6952(2017)04-0065-05
2016-11-28
2016-12-24
抚顺市科学技术发展资金计划项目(FSKJHT201548);2014年国家级大学生创新创业资助项目(201410148060、201510148068)。
方健飞(1995-),男,本科生,机械设计与自动化专业,从事机械设计制造及其自动化研究;E-mail:1697253920@qq.com。
张威(1972-),男,博士,副教授,从事嵌入式应用技术和信息安全研究;E-mail:zhangwei2002@126.com。
TP24
A
10.3969/j.issn.1672-6952.2017.04.015
投稿网址:http://journal.lnpu.edu.cn
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
小学生导刊(2018年34期)2018-12-18
制造技术与机床(2017年3期)2017-06-23
山东青年(2016年3期)2016-02-28
母子健康(2015年1期)2015-02-28
延河(下半月)(2014年3期)2014-02-28
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
