
高频超声探头直线扫描电机的自适应逆控制
2017-07-19 11:31常仙云卜朝晖
电子科技 2017年8期
常仙云,卜朝晖
(上海理工大学 医疗器械与食品学院,上海 200093)
高频超声探头直线扫描电机的自适应逆控制
常仙云,卜朝晖
(上海理工大学 医疗器械与食品学院,上海 200093)
提出了一种利用直线电机进行高频超声探头直线扫描的控制系统。传统的PID控制参数整定困难,自适应控制可以自动调整参数,但动态特性不理想,调节时间过长。采用自适应逆控制,并利用filtered-x LMS算法,可以使高频超声探头直线扫描系统的动态特性和抗干扰能力得到明显改善。仿真与实验结果均表明,扫描系统阶跃响应的上升时间约为0.1 s,调节时间约为0.12 s,且无超调, 该控制系统具有良好的动态特性,控制精度高且抗干扰能力强。
自适应逆控制;直线电机;filtered-x LMS算法
高频超声被广泛应用于对结构精细的浅表非透明组织的检查,比如皮肤,眼前节,浅部淋巴,腔内浅表组织等[1-2]。但是由于工艺和成本的限制,目前绝大部分应用于体表器官的高频超声设备均使用单晶片聚焦换能器[3-4],并通过机械方式实现扫描。超声成像通常有扇形和线性两种扫描方式。对皮肤和浅部淋巴而言,线性扫描远优于扇形扫描,而对于像眼前节这样的表面凸起的组织,最好的扫描方式是沿着眼球表面曲率运动的弧形扫描,但是弧形扫描结构复杂,使用不便,线性扫描不失为一个较好的折中方案[5]。机械扫描探头的核心部件是扫描电机,而直线电机既可以保证超声探头进行线性运动,也可以避免常规旋转式电机所要进行的旋转-直线运动转换,减少了探头的复杂性和噪音。
直线电机具有结构简单、精度高、噪声小、机械损耗低等优点,但是,由于直线电机控制系统的非线性,多变量耦合及时变等复杂性,使得典型的PID控制参数整定困难,难以取得良好的性能,因此需要设计出具有一定自适应能力且性能良好的直线电机控制系统。
自适应控制可以自动调整参数,具有一定自适应能力,但动态特性不理想,调节时间过长。本设计采用自适应逆控制,并利用filtered-x LMS算法,使得高频超声探头直线扫描系统的动态特性得到明显改善,控制精度高且具有良好的抗干扰能力。
1 直线电机
直线电机[6-7]的结构如图1所示。图1中,定子由圆筒状轭铁,圆柱形铁芯和两块瓦状永久磁铁组成,轭铁和铁芯构成闭合磁路,磁铁贴在轭铁内壁,和轭铁紧密接触,磁铁和铁芯之间的空间形成一个磁隙,其间的磁场近似匀强磁场;动子是一个由滑块和线圈组成的一体结构,滑块安装在直线导轨上,线圈则套在铁芯上,运动线圈内径略大于铁芯直径而外径略小于磁铁内径,所以动子可延铁芯方向以直线运动。

图1 扫描电机结构示意图
根据图1中所给电机结构示意图,线圈所受安培力为
F=NBil
(1)
其中,N代表通电线圈的匝数;B代表通电线圈所在的空间中磁场强度,单位T;i代表线圈两端的电流强度,单位A;l代表通电线圈中每匝的周长,单位m;因此,只要改变电流的方向和大小,就可以改变滑块受力方向和大小。
电枢反电势E为
E=NBlv
(2)
力平衡方程式为
(3)
其中,Fc为总的阻力。
电力平衡方程式为
(4)
其中,Ra为线圈电阻;La为线圈电感;Ia为线圈中的电流。从而可以得到线圈端电压U(n)与直线电机的滑块位移y(n)的关系式为
(5)
其中,T为采样周期。
Kt=Ke=NBl
式(5)即为直线电机的数学模型。
2 自适应逆控制
自适应逆控制[8-12]是解决自适应控制问题的另一种方法,它基于系统的自适应逆模拟技术。其理论基础是Wiener滤波器理论和自适应滤波器理论。与以往所用的反馈控制系统不同,它是一种前馈控制系统。
2.1 自适应逆控制的一般形式
如图2所示为自适应逆控制的原理框图,其基本思想就是通过对被控对象的逆进行在线建模[13],然后构建一个控制器,其传递函数为被控对象的逆,利用该控制器去控制被控对象,从而使得被控对象的输出能够准确跟随期望输入。

图2 自适应逆控制的框图
2.2 自适应逆控制
区别于一般的自适应逆控制,在filtered-x LMS算法中按级联顺序将被控对象逆模型的自适应建模放在被控对象之前,如图3所示,此时被控对象后面的干扰q(n)不会出现在自适应滤波器的输入端,因此干扰q(n)对逆模型的收敛解不会产生太大的影响,从而使控制系统的抗干扰能力得到大幅提高。
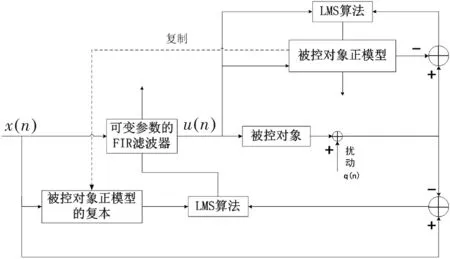
图3 filtered-x LMS算法框图
3 自适应逆控制系统设计
采用filtered-x LMS自适应逆控制系统实现直线电机的控制,控制系统框图如图4所示。
filtered-x LMS自适应逆控制系统由两个自适应环节组成,一个是用来构建直线电机的正模型,另一个是用来构建直线电机的逆模型,逆模型同时作为控制器,而正模型会被严格复制用来代替直线电机本身。正模型复本的输出作为LMS算法的输入,直线电机的输出与期望输入的差值作为LMS算法的另一个输入,通过该算法来调节控制器参数,最终使电机输出位移跟随期望输入。
4 控制系统的仿真研究
在Matlab仿真环境下,对基于filtered-x LMS算法的直线电机逆控制系统的动态特性与抗干扰能力进行仿真[14-15]。
4.1 直线电机的数学模型
直线电机的数学模型如式(5)所示。这里,实验所用直线电机的质量为m=25.9×10-3kg,线圈匝数为76,可测得B=0.2 T,l=12.56×10-2m,La=2.43×10-3H,Ra=2.4 Ω。Lam很小可以忽略,直线电机可以近似的看作一个二阶系统,其数学模型为
U(n)=1.68×103y(n)-2.98×103y(n-1)+
1.3×103y(n-2)
(6)
4.2 控制系统动态性能的仿真研究
当输入为单位阶跃信号时,控制系统阶跃响应的仿真结果如图5所示。这里令扰动q(n)为零。
根据图5可得出阶跃响应的上升时间tr约为0.1 s,调节时间ts约为0.12 s,且无超调。
根据仿真结果可知,filtered-x LMS自适应逆控制系统具有良好的动态特性。
4.3 控制系统抗干扰能力的仿真研究
在直线电机前加入一个扰动q(n),并令其为白噪声,如图4所示。系统的响应时间与噪声方差关系的仿真结果如图6所示。图中“〇”表示系统阶跃响应的调节时间;“*”表示系统阶跃响应的上升时间,且每个点所对应的数据都是100次仿真结果的数学期望值。
仿真结果表明,随着噪声方差的增大,上升时间与调节时间也会逐渐变长,但整体仍然可以维持在一个较小的数值,说明该控制系统具有良好的抗干扰能力。
5 实验结果
控制系统的实验框图如图7所示。其中,波形发生器给定控制系统的期望输入x(n)为正弦信号,输出信号为数字位移传感器的输出y(n)。
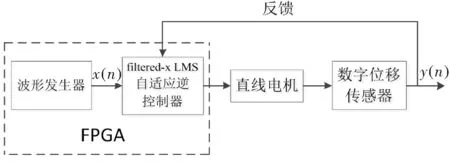
图7 控制系统的实验框图
实验结果如图8所示,其中实线波形为数字位移传感器的输出y(n),“+”号线表示的波形为控制系统的期望输入x(n)。
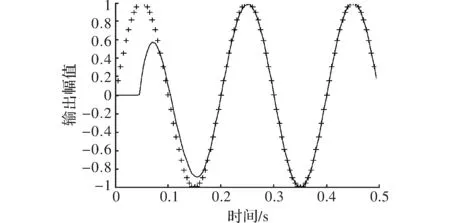
图8 直线电机位置输出跟踪图
实验结果表明,控制系统的实际调节时间为0.16 s与仿真得到无噪声系统阶跃响应的调节时间0.12 s基本一致,说明该控制系统在实际运行中具有良好的动态特性与抗干扰能力。
6 结束语
设计了一种用于高频超声探头直线扫描电机的filtered-x LMS自适应逆控制系统,通过对该系统仿真研究与实验结果的分析,表明该控制系统具有良好的动态特性,控制精度高,抗干扰能力强,能够较好的执行对高频超声探头直线扫描过程的控制。
[1] Yeh C L, Chen B R, Tseng L Y, et al. Shear-wave elasticity imaging of a liver fibrosis mouse model using high-frequency ultrasound[J].IEEE Transactions on Ultrasounics,Ferroelectrics and Frequency Control,2015,62(7):1295-1307.
[2] Caeotenuto R,Caliano G,Caronti A,et al.Fast scanning probe for ophthalmic echography using an ultrasound motor[J].IEEE Transactions on Ultrasounics,Ferroelectrics and Frequency Control,2005,52(11):2039-2046.
[3] Ritter T,Shrout T R,Tutwiler R,et al.A 30-MHz piezo-composite ultrasound array for medical imaging applications[J].IEEE Transactions on Ultrasonics,Ferroelectrics and Frequency Control,2002,49(2):217-230.
[4] 柳青青,郑政.AMR传感器在UBM线性扫描探头中的应用[J].传感器与微系统,2013,32(2): 146-148.
[5] Cravotta R.Peering into ultrasound, machines[EB/OL].(2009-07-18)[2016-03-25]http://www.edn.com/article/CA6666233.html.
[6] 梅晓榕,柏桂珍,张卯瑞.自动控制元件及线路[M].北京:科学出版社,2015.
[7] 王潇.数控机床大推力永磁同步直线电机控制方法[J].电子科技,2011,24(6):124-126.
[8] Bernaed W, Samuel D Stearns.自适应信号处理[M].王永德,龙宪惠,译.北京:机械工业出版社,2008.
[9] 赵隽,战兴群,张炎华.基于X-LMS自适应逆控制理论的船舶自动舵研究[J].船舶工程,2003,25(4):59-61.
[10] 宋宏,曲永印,刘德军.自适应逆控制的永磁同步电机位置系统[J].煤矿机械,2008,29(7): 125-126.
[11] 刘侠,张瑞金,吴捷.自适应逆控制的研究综述[J].电气自动化,2003,25(6):5-8.
[12] 曲用印,白晶.自适应逆控制异步变频调速系统研究[J].控制与决策,2007,22(7):821-824.
[13] 刘小河,管萍,刘丽华.自适应控制理论及应用[M].北京:科学出版社,2011.
[14] 庞中华,崔红.系统辨识与自适应控制Matlab仿真[M].北京:航空航天大学出版社,2012.
[15] 李萍,曹健.直线电机的紧格无模型自适应控制[J].微电机,2014,47(9):50-56.
Adaptive Inverse Control of Linear Scanning Motor for High Frequency Ultrasound Probe
CHANG Xianyun,BU Zhaohui
(School of Medical Instrument and Food Engineering,University of Shanghai for Science and Technology,Shanghai 200093,China)
The paper deals with a control system of the high frequency ultrasonic probe line scanning by means of a linear motor. The parameter tuning is difficult for traditional PID control. Adaptive control can automatically adjust the parameters, but the dynamic characteristics is not ideal, mainly due to a long adjusting time. Using the adaptive inverse control and combining with the filtered-x LMS algorithm, the dynamic characteristics and the anti-interference ability of the high frequency ultrasonic probe linear scanning system can be improved significantly. Both the simulation and the experimental results show that the rising time of the step response of the scanning system is about 0.1 s, and the adjusting time is about 0.12 s, with no overshoot. The control system has the good dynamic performance, high control precision and the strong anti-interference ability.
adaptive inverse control;linear motor;filtered-x LMS algorithm
2016- 10- 31
常仙云(1993-),男,硕士研究生。研究方向:生物医学仪器及医学信息技术。卜朝晖(1972-),男,博士,讲师。研究方向:微弱信号检测技术。
10.16180/j.cnki.issn1007-7820.2017.08.014
TP273;R445.1
A
1007-7820(2017)08-052-04
猜你喜欢
环球时报(2020-08-11)2020-08-11
汽车维修技师(2019年7期)2020-01-16
机电工程技术(2018年10期)2018-12-06
汽车维修技师(2018年11期)2018-05-11
中国高新技术企业(2017年5期)2017-05-05
中学生数理化·高一版(2017年1期)2017-04-25
科技与创新(2016年11期)2016-06-28
数字技术与应用(2014年8期)2014-12-13
新高考·高一物理(2014年4期)2014-09-17
现代防御技术(2014年6期)2014-02-28
