
一种基于斜距离信息的探测系统航迹起始算法
2017-07-19 11:31:02杜嘉薇陈汗龙崔龙飞
电子科技 2017年8期
张 星,杜嘉薇,陈汗龙,崔龙飞
(中国洛阳电子装备试验中心研究所,河南 洛阳 471003)
一种基于斜距离信息的探测系统航迹起始算法
张 星,杜嘉薇,陈汗龙,崔龙飞
(中国洛阳电子装备试验中心研究所,河南 洛阳 471003)
航迹起始是探测系统的重要组成部分,是情报处理的首要问题,确保正确的航迹起始是减少探测跟踪固有组合爆炸的有效措施。在研究常用的直观法、M/N逻辑法等航迹起始算法的基础上,提出了基于斜距离信息的改进逻辑法,在M/N逻辑框架下内增加斜距离的二次波门约束,并将同一波门内的多个量测合并成一个组合量测,减少起始航迹数量,提高航迹起批效率。仿真结果表明,改进逻辑法较直观法、M/N逻辑法,能够更有效建立航迹,减少航迹起始分支。
探测系统;航迹起始;M/N逻辑法;斜距离;二次波门
航迹起始是根据探测系统最初的几个观测量,进行“点迹-点迹”的数据关联,实现暂时航迹的形成,而后经过数步确认或滤波,产生起始航迹,最终确认为可靠航迹。现有的航迹起始算法分为顺序处理技术和批处理技术两大类。顺序数据处理技术适用于相对无杂波环境中的航迹起始,但在复杂环境下性能较差,主要包括直观法和M/N逻辑法。批数据处理技术适用于强杂波环境,但需要多周期扫描才能较好起始航迹,并且容易引起“组合爆炸”,主要包括Hough变换法及其衍生算法[1-6]。
1 相关工作
目前工程中最常用的航迹起始算法是M/N逻辑法及其改进。文献[7]根据多基雷达系统的特性,利用已完成航迹起始并跟踪的雷达情报引导未航迹起始的雷达,调整预测波门内的检测门限,完成目标检测和航迹起始过程[6]。余沙等在使用修正逻辑法之前,使用网格聚类对观测值进行预处理,去除噪声和杂波,排除其他网格点迹的干扰[7]。牟聪等利用极坐标系下回波特性,对M/N逻辑法进行改进,增加运动状态判别抑制虚假航迹。文献[8]在使用修正逻辑法之前,使用网格聚类对观测值进行预处理,去除噪声和杂波,排除其他网格点迹的干扰。文献[9]利用极坐标系下回 波特性,对M/N逻辑法进行改进,增加运动状态判别抑制虚假航迹。文献[10]将基于M/N逻辑和基于一步延迟的航迹起始方法相结合,加强约束条件,减少杂波的影响。文献[11]提出了一种通用航迹起始模型,在M/N逻辑法航迹头、临时航迹、可靠航迹基础上,增加了一级中间航迹的判断,有效改善逻辑法航迹起始分裂和丢失问题。文献[12~13]将Hough变换和逻辑法相结合,提高杂波环境和三维空间航迹起始能力。
本文提出基于斜距离信息的改进逻辑法,利用探测系统的斜距离信息对波门内的量测进一步约束,并将斜距离波门内的量测合并为一个组合量测,提高航迹起批效率。仿真分析比对直观法、M/N逻辑法、基于斜距离信息的改进逻辑法,验证改进算法的有效性。
2 航迹起始算法
(1)直观法。直观法使用速度、加速度和角度3个规则来确认航迹。假设zi,i=1,2,…,N为N次连续扫描获得的目标位置量测值,若量测值满足以下两个条件,则确认一条航迹成功起始。
1)目标速度大于最小值Vmin、且小于最大值Vmax
(1)
2)目标加速度的绝对值小于最大加速度x。如果存在多个回波,则采用加速度最小的那个回波
(2)
(2)M/N逻辑法。M/N逻辑航迹起始算法是以多重假设的方式通过预测和相关波门来确认可能存在的航迹,其步骤为:
1)将第一个扫描周期得到的所有量测作为航迹头,用速度约束建立初始相关波门,若第二个周期中有量测落入此波门即建立临时航迹;
2)将临时航迹进行一阶多项式外推,以航迹外推误差协方差确定相关波门。若第三个周期中有量测落入相关波门,则将临时航迹与离外推点最近的量测互联;反之则本周期内没有量测与航迹互联;
3)采用滑窗法的M/N逻辑,即在N个连续扫描周期中有不少于M次量测互联即宣告航迹起始成功;
4)对于那些在历次扫描过程中均未落入任何相关波门的量测,将它们作为新航迹头,从步骤1)重新开始。M/N逻辑法是工程实践常用的方法,常选择3/4检查逻辑作为正常航迹起始;2/3检查逻辑作为航迹快速启动。
3 基于斜距离信息的改进逻辑法
文献[1~5]表明,在稀疏杂波环境下,直观法和逻辑法具有较低的计算量,易于工程实现,但是在密集杂波条件下,辨别目标和虚警的能力较差。密集杂波条件可归纳为邻近目标的互相干扰和复杂背景的杂波量测影响。
针对邻近目标干扰和杂波量测的影响,本文提出了一种基于斜距离信息的改进逻辑法,在M/N逻辑法的基础上,增加斜距离探测精度倍数的二次波门约束,解决邻近目标对航迹起始的干扰将二次波门内的杂波量测认为是可信点迹,对二次波门内的所有量测加权合并,解决杂波量测的影响,算法原理如图1所示,算法步骤如下。

图1 基于基于斜距离信息的改进逻辑法
(1)以第一个周期接收到的所有量测[z1(1),z2(1),…,zn1(1)]作为航迹头;
(2)对第二个周期探测的量值[z1(2),z2(2),…,zn2(2)]进行约束判断,若zi(2)与第j个航迹头zj(1)满足式(4)的波门条件,则确定zi(2)与zj(1)互联,建立临时航迹i,临时航迹的运动状态如式(7)所示,协方差矩阵如式(8)所示;若有多个量测能够与同一个航迹头互联,则对同一个航迹头建立多个临时航迹;若没有量测能够与航迹头互联,不再扩展到下一个周期,直接认为该航迹头是野值点,删除该航迹头;第二个周期所有的航迹头都不互联的量测作为新的航迹头
(3)
(4)
(5)
(6)

(7)
(8)

(3)在第3个周期,量测值为[z1(3),z2(3),…,zn3(3)],将第2步形成的临时航迹进行一阶多项式外推,参照文献[14~15],利用式(9)计算第3个周期的预测值zi(3|2),利用式(12)计算量测值zl(3)与zi(3|2)之差的归一化统计距离Uil(3)
(tl(3)-ti(2))
(9)
(10)
(11)
Sl(3)=HTPi(3|2)H+Rl(3)
(12)
Pi(3|2)=FPi(2|2)FT
(13)

(14)
(15)
(16)
Xi(3|3)=Xi(3|2)=FXi(2|2)
(17)
Pi(3|3)=Pi(3|2)
(18)
(5)循环第(1)~(4)步,直至探测结束。
4 仿真分析
仿真场景设定:有5个做匀速直线运动的军用飞机,初始位置为(70 000 m,70 000 m)、(73 000 m,70 000 m)、(76 000 m,70 000 m)、(70 000 m,74 500 m)、(70 000 m,79 000 m)。5个目标的初始速度均为vx=-250 m/s,vy=-250 m/s。雷达位于原点(0 m,0 m),测向误差为0.5°,测距误差为100 m,采样周期T=10 s。每个采样周期产生25个量测值,包括5个真实探测值和20个虚警,如图2所示,分别使用直观法、逻辑法和本文提出的改进逻辑法对此场景进行航迹起始。

图2 真实航迹和量测
直观法是根据速度、加速度来进行航迹起始,只需要3个周期的判断,本仿真外推一个周期。在仿真场景下,由于测量误差的影响,直观法无法完全进行航迹起始,其结果如图3所示。

图3 仿真场景下直观法航迹起始
M/N逻辑法假定第一个周期接收的均为航迹头,在第二个周期内只要在阈值之内的都建立临时航迹,之后利用一阶多项式外推,以外推点为中心设置波门。本文采用3/4检查逻辑,并外推一个周期,在仿真场景下,有很多虚假航迹起始,如图4所示。
基于斜距离信息的改进逻辑法在M/N逻辑法的基础上,引入距离测量精度,对M/N逻辑法起批的航迹进行二次约束,减少虚假航迹,如图5所示。
由图5可见,使用基于斜距离信息的改进逻辑法航迹起始,虚假航迹明显减少,起始的航迹更为合理。其中也存在属于同一真值航迹的多条起始航迹,其分叉处对应的量测非常接近,无法区分,此时进一步修正,将二次波门中的多个量测进行加权合并,如图6所示。
进行10次蒙特卡洛仿真,比对直观法、M/N逻辑法和基于斜距离信息的改进逻辑法的处理时间和起批数量,如表1所示。

图4 仿真场景下M/N逻辑法航迹起始
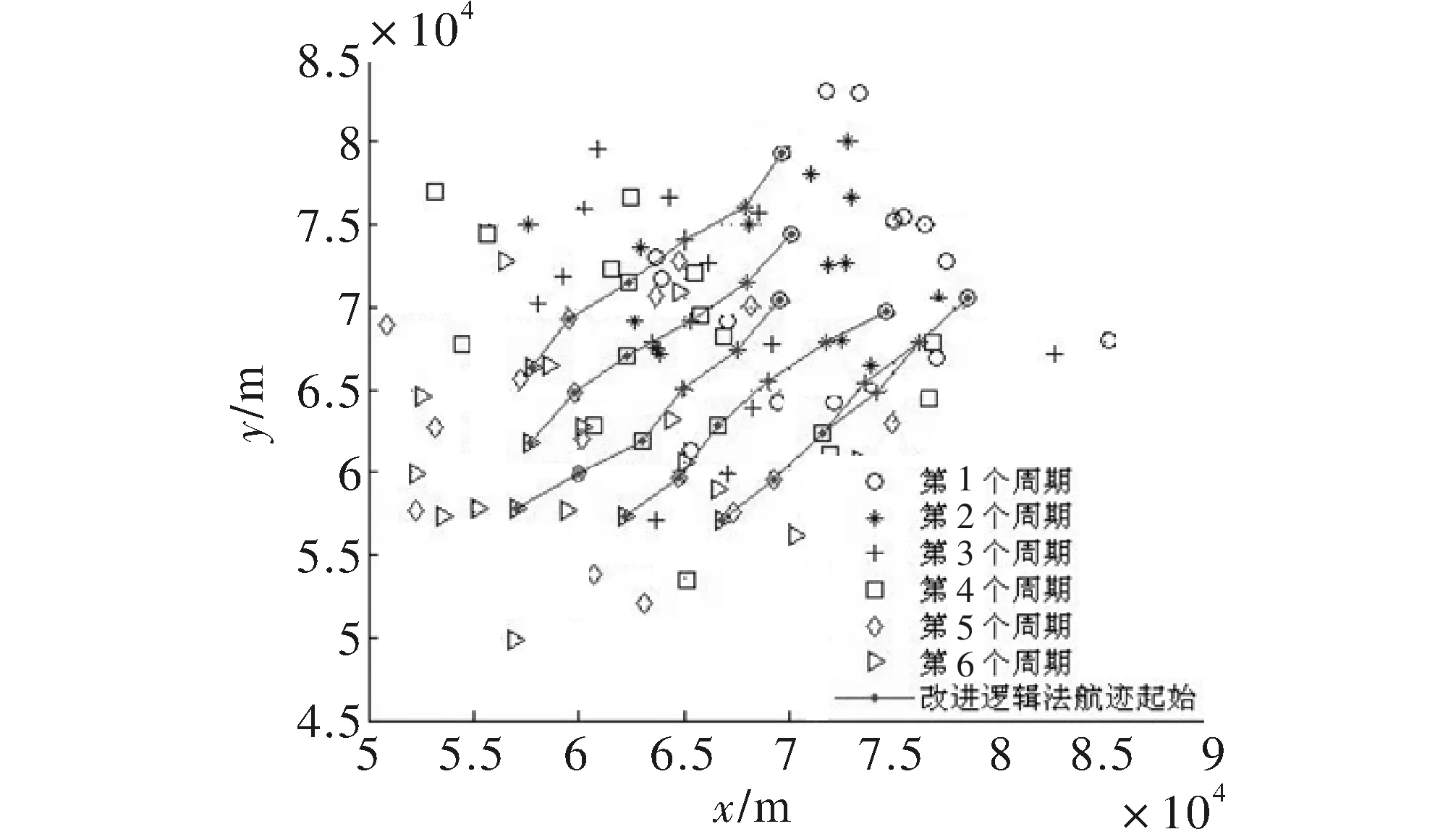
图5 仿真场景下改进逻辑法航迹起始
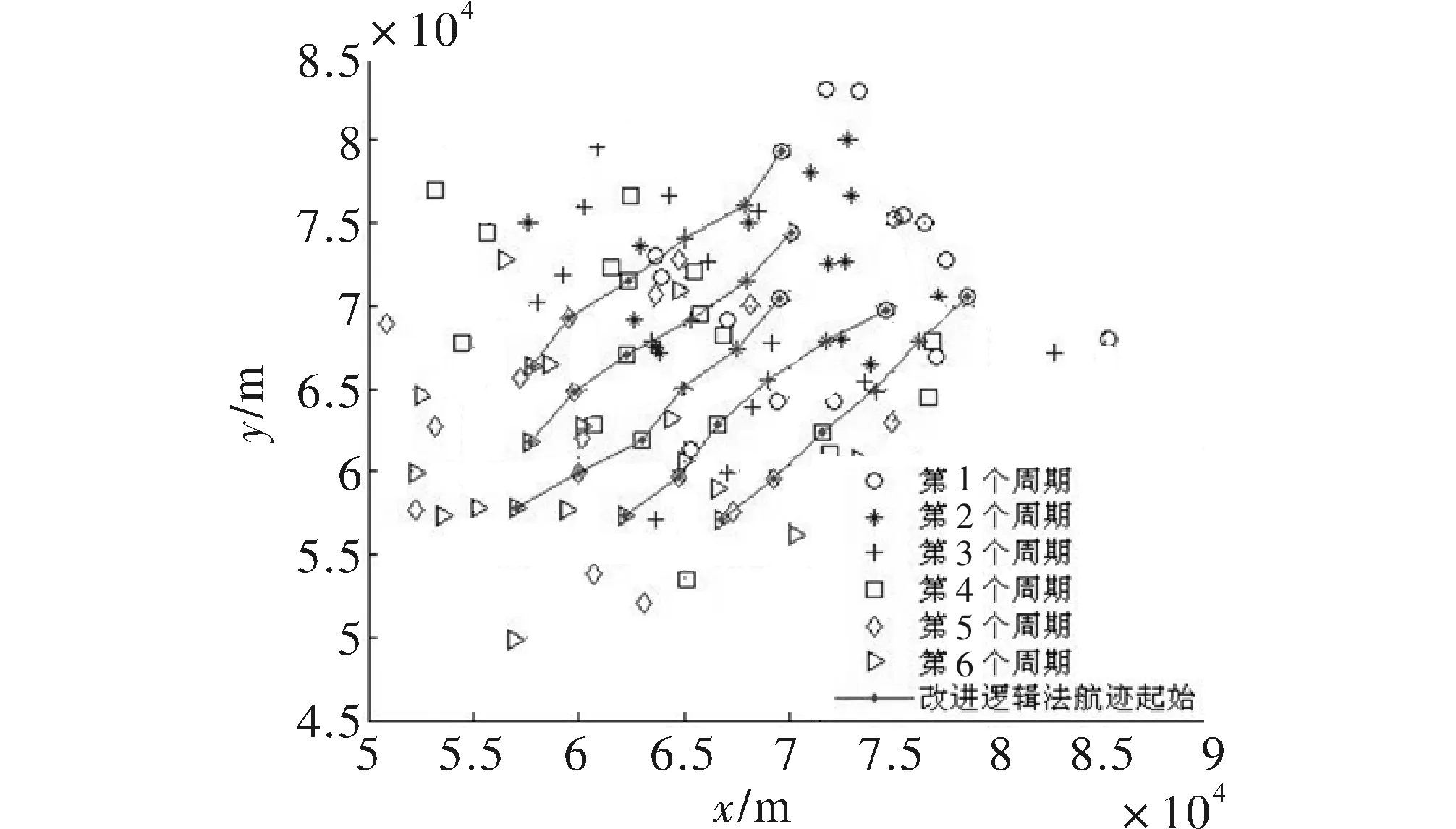
图6 仿真场景下改进逻辑法使用组合量测起始航迹

仿真次数直观法起始航迹数量M/N逻辑法起始航迹数量改进逻辑法起始航迹数量12/34/395/523/55/295/531/25/805/641/14/614/452/25/1135/562/24/425/570/04/264/480/03/343/491/14/1285/5100/04/204/4
表1中数量A/B表示共有B条起始航迹,其中A条是真实航迹,结果表明,基于斜距离信息的改进逻辑法较直观法、M/N,能够有效提高航迹起始效率。但同时由于增加了距离约束,可能排除真实航迹,需要进一步开展研究,解决过约束问题。
5 结束语
基于斜距离信息的改进逻辑法在M/N逻辑法框架下,根据输出量测距离特性,在跟踪波门中增加斜距离的二次波门,概率加权二次波门内的量测为组合量测,减少航迹起始分支,提高航迹起批效率。仿真结果表明,在密集杂波背景下,基于斜距离信息的改进逻辑法较直观法和M/N逻辑法,能够更有效建立航迹。下一步研究新的量测特性,更有效利用量测信息,解决过约束导致真实航迹排除的问题。
[1] 严康.多传感器多目标航迹跟踪与融合算法研究[D].南京:南京理工大学,2012.
[2] 贺鹏.Hough变换航迹起始算法研究[D].西安:西北工业大学,2007.
[3] 廉杰.航迹起始及机动目标跟踪方法的研究[D]. 哈尔滨:哈尔滨工业大学,2006.
[4] 范恩,谢维信,刘宗香.异类传感器合成量测的模糊航迹起始方法[J].信号处理,2013,29(11):1439-1445.
[5] 金术玲,梁彦,王增福,等.两级Hough变换航迹起始算法[J].电子学报,2008,36(3):590-593.
[6] 王国宏,苏峰,毛士艺,等.杂波环境下基于Hough变换和逻辑的快速航迹起始算法[J].系统仿真学报, 2002,14(7):874-876.
[7] 刘红亮,但晓东,周生华,等.一种基于跟踪信息的多基雷达系统航迹起始算法[J].电子与信息学报,2015,37(10):2536-2540.
[8] 余沙,陈明燕,曹建蜀.基于网格聚类和修正逻辑的航迹起始算法[J].计算机科学,2015,42(4):181-184.
[9] 牟聪,王伟,张明,等.一种极坐标系下的航迹起始方法[J].火控雷达技术,2012,42(1):42-46.
[10] 张喆,樊晓光,李建勋.基于M/N逻辑和一步延迟的航迹起始方法[J].计算机工程,2011,37(10):234-236.
[11] 朱自谦.一种通用航迹起始模型[J].航空学报,2009,30(3): 497-504.
[12] 王怀理,王德生,田立生.Hough变换在航迹起始中的应用[J].清华大学学报:自然科学版,2002,42(7): 909-912.
[13] 王国宏,苏峰,何友.三维空间中基于Hough变换和逻辑的航迹起始[J].系统仿真学报,2004,16(10):2198-2200.
[14] 万顷浪,张殿福.基于卡尔曼粒子滤波的目标跟踪算法[J].电子科技,2013,26(8):7-12.
[15] 曹华杰,吕传龙,刘浩东.构建基于线性CCD的直立行走嵌入式系统[J].电子科技,2016,29 (2):58-61.
A Track Initiation Algorithm for Detection System Based on Oblique distance Information
ZHANG Xing,DU Jiawei,CHEN Hanlong,CUI Longfei
(Luoyang Electronic Equipment Test Center Research Institution,Luoyang 471003,China)
Track initiation which is an important part of the detect system, is the primary issue of information processing. Ensuring the correct track initiation is an effective measure to reduce the combination explosion of the detecting and tracking. Through the research of the intuitive method andM/Nlogical method, an improved logical method based on oblique distance information is proposed in this paper. Based on the traditionalM/Nlogical method,the new method increase oblique distance information as a second wave gate constraint. Make the measures which are in the save wave gate constraint to be a composite measure, in order to improve the efficiency of the track initiation. Simulation results show that the improved logical method can effectively establish track, decrease the branches of the track initiation.
detection system;track initiation;M/Nlogical method;oblique distance;second wave gate constraint
2016- 10- 08
张星(1986-),男,硕士,工程师。研究方向:情报处理等。
10.16180/j.cnki.issn1007-7820.2017.08.010
TN953;TP274
A
1007-7820(2017)08-036-04
猜你喜欢
兵器装备工程学报(2022年7期)2022-08-10 03:37:34
科学与信息化(2021年30期)2021-12-24 08:00:20
科学与信息化(2021年5期)2021-03-19 01:09:24
无线电工程(2020年11期)2020-10-28 07:12:24
计算机应用与软件(2020年8期)2020-09-02 01:33:56
青年歌声(2019年12期)2019-12-17 06:32:32
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
西北工业大学学报(2015年3期)2015-12-14 13:08:44
遥测遥控(2015年2期)2015-04-23 08:15:22
