
基于T-S模型的无线网络系统的量化输出反馈控制器设计*
2017-07-19 13:11程红柳葛素芸徐伟
移动通信 2017年12期
程红柳,葛素芸,徐伟
(南京信息工程大学电子与信息工程学院,江苏 南京 210044)
基于T-S模型的无线网络系统的量化输出反馈控制器设计*
程红柳,葛素芸,徐伟
(南京信息工程大学电子与信息工程学院,江苏 南京 210044)
针对无线网络中的高度非线性问题建立基于T-S模糊模型的连续控制系统,并考虑到网络中的状态时滞和不确定性,对于网络通信信道的压力问题引入对数量化器,同时为了提高无线网络控制系统的稳定性,引入模糊动态输出反馈,最终给出无线网络控制系统的量化输出反馈控制器的设计方法,并以LMI(线性矩阵不等式)形式描述,同时以数值例子说明设计方法的有效性。
无线网络控制系统 T-S模糊模型 模糊动态输出反馈
1 引言
无线网络控制系统成为近期研究的热点,大多数研究者都针对其高度非线性、时滞、丢包、不确定性等[1]一系列特点提出各种解决方法来减小系统稳定的保守性。研究者常用T-S模糊模型为无线网络控制系统建模,如文献[2]总结了近年来关于T-S模糊控制的研究,文献[3]和文献[4]基于T-S模糊系统,考虑状态反馈,给予了保性能控制器设计。但由于环境或经济条件的限制,控制系统并不能满足在任何情况下所有的状态都为可测量的,这就促使研究者们将方向转移到了输出反馈控制器上。文献[5]和文献[6]引入了静态输出反馈,并给出了控制器的设计方法。为了更好地克服无线网络的不确定性,研究者们又提出了更为复杂的动态输出反馈的概念,如文献[7]、文献[8]、文献[9]致力于动态输出反馈的研究。本文基于T-S模型,对无线网络系统的量化输出反馈控制器进行了设计。

2 问题描述
其中,0<ρi<1是量化密度,且ηi=(1-ρi)/(1+ρi),另外θ0是量化器的初始状态。上述表达式可简化为q(x)=(I+Dq)x,ǁDqǁ≤ηi。
考虑以下带量化的满阶动态输出反馈控制器,并经过去模糊化后,可表示为:
对于无线网络控制系统中的高度非线性,用以下带有不确定参数的T-S模型为其建模,表达式如下:
第j条模糊规则为:

如果α1(t)属于Nj1,α2(t)属于Nj2,...,并且αm(t)属其中,α1(t)、α2(t)、...、αm(t)为前提变量,Njn(n=1, 2, …, m)为模糊集,x(t)、µ(t)和y(t)分别为系统的状态向量、控制输入向量和控制输出向量,τ>0是滞后时间常数。另有,
其中,)(ˆtx是控制器状态。
对系统(4)采用控制律(6),可得闭环系统为:
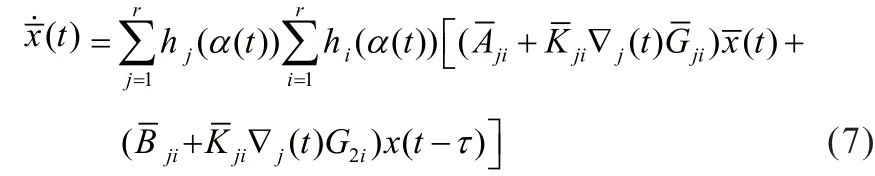

其中,

其中,矩阵Aj、Bj、Cj、Dj、Ej、Fj、K1j、K2j、G1j、G2j和G3j是已知实常数矩阵,且具有适当维数。矩阵▽j(t)是满足的未知矩阵。
经过单点模糊、乘积推理以及中心加权反模糊化[3]等一系列操作,可得全局模糊系统为:

3 量化输出反馈控制器设计
另外Njn(αn(t))表示模糊值Njn隶属于前提变量αn(t)的
这一节将给出模糊量化输出反馈控制器的设计方法。
3.1 定理3.1
定理3.1:对网络控制系统(4),存在一个模糊量化输出反馈控制器(6),给定常量ηi(i=1, 2, ..., r),如果存立:

根据文献[10],引入对数量化器表达式为:



进一步,若不等式(8)和(9)存在可行解,可以按以下步骤构造得到相应的控制器系数矩阵:
(1)对矩阵I-P1P3进行奇异值分解,得到满足式(14)的可逆矩阵U和V;
(2)按照式(16)计算控制器系数矩阵Ccj、Bcj、Acj。
将Z(t)对时间t求导,并代入系统(7),可得:
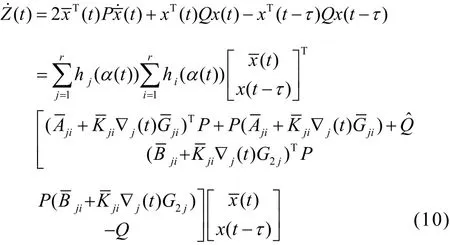
当式(11)成立时,使得Z˙(t)<0,则闭环系统渐近稳定。

要使上述不等式对所有不确定性成立,则必须存在标量γji>0,使得:

应用矩阵的舒尔补引理,上式等价于:

接下来将矩阵P和它的逆矩阵P-1进行如下分解:

由等式PP-1=I可以推出:定义矩阵则PT1=T2。

将式(13)分别左乘diag {TTI I I I}和右乘其转置
1可得:
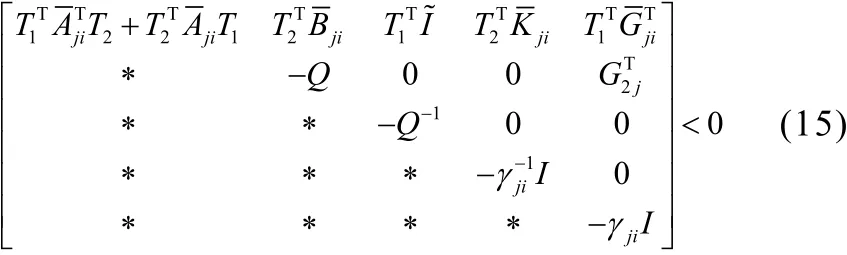
代入上式中各变量以及Dq≤≤ηiηi,同时令
矩阵不等式(15)可转化为不等式(9),证毕。
注意到在不等式(9)中矩阵Q和它的逆矩阵、标量jiγji和它的逆同时出现,可引入求矩阵秩的最小问题代替不等式(9)的可行性问题。为此引入新的变量


因此,矩阵不等式(9)的可行性等价于:

定理3.1可以进一步转化为定理3.2。
3.2 定理3.2
定理3.2:对网络控制系统(4),存在一个模糊量化输出反馈控制器(6),给定常量ηi(i=1, 2, ..., r),以下最优化问题:

算法:
第二步:求解以下问题:

第三步:验证得到的最优解是否满足式(18)。若满足,得到的解即为所求最优解;若不满足,且k>N(允许重复次数),则显示无解并离开。
第四步:如果k≤N,转到第二步且令k=k+1继续循环。
4 数值例子
参照文献[3]无线网络控制系统,建立如(1)式的T-S模糊模型,假设只有两个规则,且两个规则中的各系数矩阵为:



对I-P1P3进行奇异值分解得:

则控制器系数矩阵相应为:


5 结论
本文考虑了一个基于T-S模糊模型和状态时滞的不确定无线网络控制系统,同时引入对数量化器和模糊动态输出反馈,且以LMI形式给出了系统的量化输出反馈控制器的设计方法。为进一步减小系统稳定的保守性,在今后的研究中可在模糊李雅普诺夫函数的选取方面做进一步探索。
[1] 彭丽萍,岳东. 无线网络控制系统的研究[J]. 控制工程, 2006,13(5): 481-484.
[2] 肖建,赵涛. T-S模糊控制综述与展望[J]. 西南交通大学学报, 2016,51(3): 462-474.
[3] 程红柳. 基于T-S模型的无线网络系统的量化保性能控制器设计[D]. 杭州: 杭州电子科技大学, 2013.
[4] Lu R, Cheng H, Bai J. Fuzzy-Model-Based Quantized Guaranteed Cost Control of Nonlinear Networked Systems[J]. IEEE Transaction on Fuzzy Systems, 2015,23(3): 567-575.
[5] 杜鑫. 基于LMI技术的线性系统模型降阶与静态输出反馈控制器设计[D]. 沈阳: 东北大学, 2009.
[6] 葛迪,姚波,王福忠. 不确定系统静态输出反馈可靠控制[J]. 计算机技术与自动化, 2016,35(1): 5-8.
[7] Lu R, Zhou X, Wu F, et al. Quantized H-infinity output feedback control for linear discrete-time systems[J]. Journal of the Franklin Institute, 2013(8): 2096-2108.
[8] Qiu J, Feng G, Gao H. Observer-Based Piecewise Aff i ne Output Feedback Controller Synthesis of Continuous-Time T-S Fuzzy Affine Dynamic Systems Using Quantized Measurements[J]. IEEE Transaction on Fuzzy Systems, 2012,20(6): 1046-1062.
[9] 朱芳来,蒋鹏,李晓航. 基于T-S模糊模型的观测器和动态输出反馈容错控制器设计[J]. 西安交通大学学报, 2016,50(9): 91-96.
[10] Mahmoud M. Delay-dependent H-inf i nity fi ltering of a class of switched discrete-time state-delay systems[J]. Signal Process, 2008,88(11): 2709-2719.★
Design of Quantized Output Feedback Controller Based on T-S Model for Wireless Networked System
CHENG Hongliu, GE Suyun, XU Wei
(Na n j i n g U n i v e r s i t y o f I n f o r m a t i o n S c i e n c e & T e c h n o l o g y, S c h o o l o f E l e c t r o n i c & I n f o r m a t i o n E n g i n e e r i n g, Na n j i n g 210044, C h i n a)
Wireless networked control system has a series of characteristics such as high nonlinearity, delay, packet loss and uncertainty. According to the highly nonlinearity, state delay and uncertainty in wireless networks, a continuous control system based on T-S fuzzy model was established in this paper. A logarithmic quantizer was introduced to deal with the pressure of network communication channel. At the same time, in order to improve the stability of wireless network control system, fuzzy dynamic output feedback was introduced. Finally, the design method of quantized output feedback controller for wireless networked control system was presented in the form of linear matrix inequality (LMI). In addition, a numerical example is given to illustrate the effectiveness of the designing method.
wireless networked control system T-S fuzzy model fuzzy dynamic output feedback

程红柳:硕士研究生毕业于杭州电子科技大学,现为南京信息工程大学电子与信息工程学院实验教师,主要研究方向为无线网络控制。

葛素芸:硕士研究生毕业于西安电子科技大学,现为南京信息工程大学电子与信息工程学院实验教师,主要研究方向为智能控制。

徐伟:硕士研究生,高级实验师,现任职于南京信息工程大学,主要研究方向为气象仪器仪表及信号处理。
10.3969/j.i s s n.1006-1010.2017.12.017
T N929.5
A
1006-1010(2017)12-0086-05
程红柳,葛素芸,徐伟. 基于T-S模型的无线网络系统的量化输出反馈控制器设计[J]. 移动通信, 2017,41(12): 86-90.
国家自然科学基金青年科学基金(41605121);江苏高校品牌专业建设工程资助项目(1181081501003)
2017-03-14
责任编辑:刘妙 l i u m i a o@m b c o m.c n
猜你喜欢
小学生学习指导(高年级)(2023年4期)2023-05-09
中国交通信息化(2021年4期)2021-07-21
音乐天地(音乐创作版)(2020年12期)2021-01-11
铁道通信信号(2020年12期)2020-03-29
经济技术协作信息(2018年30期)2018-11-22
电子测试(2018年1期)2018-04-18
信息安全研究(2016年4期)2016-12-01
甘肃林业(2016年2期)2016-11-07
岷峨诗稿(2014年3期)2014-11-15
通信世界(2012年36期)2012-07-16
