新型爬杆清洁机器人的设计与仿真
2017-07-08 09:19王振秋薛建琪张宇崴狄海廷
科技创新与应用 2017年19期
关键词:运动仿真
王振秋+薛建琪+张宇崴+狄海廷
摘 要:针对变直径杆件,设计一种爬杆清洁机器人。该机器人由上机械手、下机械手、曲柄连杆机构等组成。上机械手和下机械手分别模拟人的上肢和下肢,轮流夹紧杆体,在曲柄连杆机构的驱动下,实现机器人的攀爬运动。在机器人本体上安装有清洁刷,在机器人攀爬过程中实现自动清洁。通过控制上机械手和下机械手夹紧和松开杆体的顺序,即可实现机器人的攀爬方向。利用Solid Works对该爬杆清洁机器人的结构进行三维建模和运动仿真分析。仿真结果表明,该机器人不仅可实现变直径杆件的攀爬清洁,还可实现对杆件某一部位的反复清洁。
关键词:爬杆机器人;变直径杆件攀爬;仿生机器人;运动仿真
中图分类号:TP242 文献标志码:A 文章编号:2095-2945(2017)19-0015-02
随着经济的不断增长,城市中出现了更多的集实用性与美观性于一体的路灯杆、电线杆、广告牌立柱及大桥钢索等杆件物体,它们常年裸露在空气中,会受到酸性物质的腐蚀,缩短使用寿命,影响美观,所以需要定期进行维护。但高空作业存在劳动强度大、效率低、危险性大、成本高等问题。因此国内外学者对爬杆机器人进行了很多研究,郭志东等人发明了一种道路灯杆擦洗清洗设备,该装置机构庞大笨重,造价很高,而且在使用过程中所消耗的能源很大,制约了在实际工程中的应用。李楠等人提出一种多姿态爬杆机器人,可在一定程度上适应变径杆的三角攀爬,但该装置需要7个电机进行协同操作,机构繁琐笨重,适用性不强。本文设计了一种可以适应不同直径的仿生爬杆清洁机器人,它不仅可以实现高效环保地对杆件进行清洁,而且具有结构简单、体积小、重量轻、成本低等优点。另外,该机器人还可以用于杆件类外表面的喷漆美化等。
1 爬杆清洁机器人结构设计
1.1 爬杆清洁机器人的结构组成
机器人整体结构由上机械手,下机械手,曲柄连杆机构、清洁刷、以及驱动机构等组成。上机械手部分固定在套筒上,套筒套在导杆上,并且可以沿导杆滑动;下机械手部分固定在导杆上。机械人模拟人爬树的动作,上机械手和下机械手分别模拟人的上肢和下肢,轮流夹紧杆体;上机械手和下机械手部分通过曲柄连杆机构进行连接。电机带动曲柄运动,进而带动连杆摆动,推动机器人上下移动;同时手爪控制电机通过齿轮传动使上机械手爪及下机械手爪水平移动,实现机器人对杆件的抓紧和松开。在机器人本体上安装有清洁刷,清洁刷在机器人攀爬过程中始终保持与杆件的紧密接触,实现自动清洁。
1.2 机器人各部分结构
1.2.1 爬升结构
机器人模仿人爬树的动作,上端机械手和下端机械手分别模拟人的手脚轮流夹紧杆体,以曲柄连杆机构代替人的躯干产生伸缩动作,实现机器人的爬杆动作。曲柄连杆机构将曲柄的旋转运动转化为连杆的直线运动,当曲柄在电机的带动下转动一周时,机器人便爬行一个步长;在爬杆过程中,清洁头处于工作状态,实现杆件的清洁。
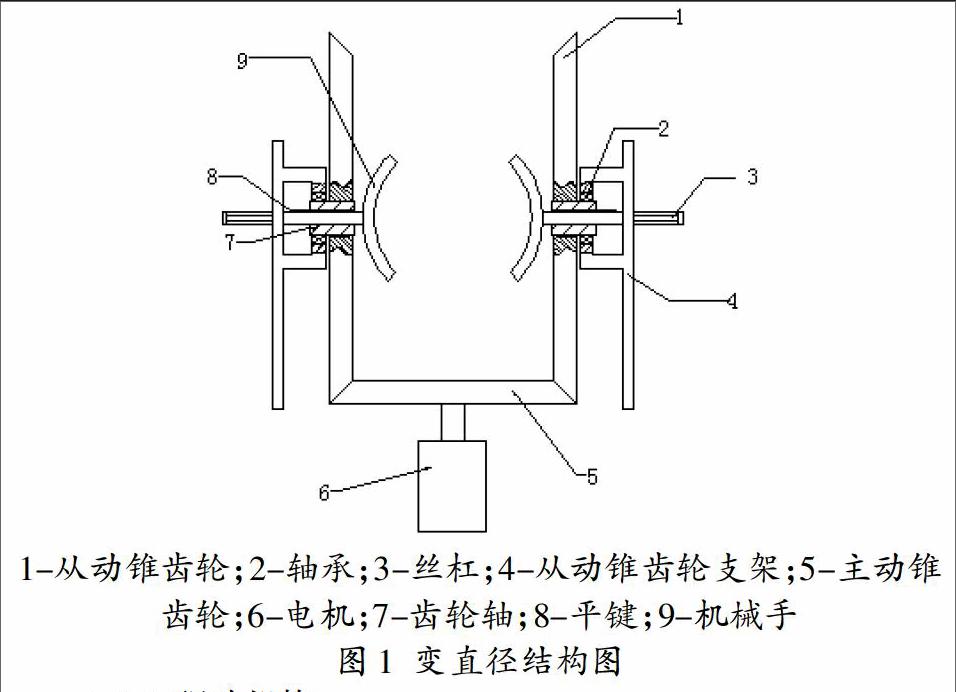
1.2.2 变直径结构
机械手结构图如图1所示。在机械手处安装压力传感器,当控制主动锥齿轮电机转动时,带动主动锥齿轮转动,主动锥齿轮带动从动锥齿轮转动,从动锥齿轮与齿轮轴连接,齿轮轴内加工有通轴的平键槽;图1中的丝杠上有平键与螺纹,其平键与齿轮轴相连,并可沿着齿轮轴内的平键槽左右滑动,该螺纹与从动锥齿轮支架上的通孔螺纹相连接,当从动锥齿轮转动时,就会带动齿轮轴转动,从而带动丝杠左右滑动,丝杠前端安装有机械手爪;丝杠的左右滑动可带动机械手爪左右滑动,内层机械手处的压力传感器反馈压力信号,当达到一定夹紧压力值时,电机停止转动,从而实现机械手爪对不同杆径的杆件进行夹紧和松开,实现攀爬功能。
1.2.3 驱动机构
整个爬杆清洁机器人由三个步进电机进行驱动,一个电机对曲柄连杆机构进行驱动,另外两个电机通过齿轮传动机构和滚珠丝杠机构对机械手进行控制,带动上端机械手和下端机械手运动并实现其夹紧和松开的动作。
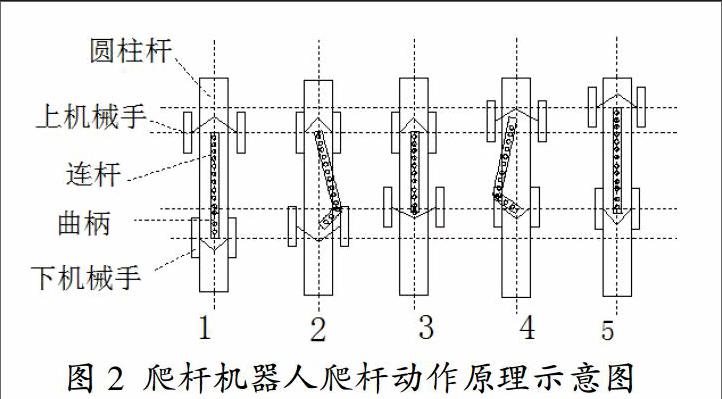
2 爬杆机器人动作过程
机器人爬杆运动过程如图2所示:(1)在初始状态1时,下机械手抓紧、上机械手松开。(2)上机械手控制电机正转,使上机械手爪夹紧杆体;同时,下机械手控制电机反转,使下机械手松开杆体。在此过程中,曲柄连杆电机持续回转,即状态2。(3)曲柄连杆电机继续回转,当曲柄连杆控制电机转动180度角时,曲柄转动180度角,机器人下机械手部分在曲柄连杆的带动下,向上爬行半个步距,即状态3。(4)下机械手控制电机正转,使下机械手夹紧杆体;同时,上机械手控制电机反转,使上机械手松开杆体。在此过程中,曲柄连杆电机持续回转,即状态4。(5)曲柄连杆电机继续回转。当曲柄再继续转动180度角时,机器人上机械手部分在曲柄连杆的带动下,向上爬行半个步距,即状态5。
曲柄每转动一圈,机器人整体向上爬行一个步距,重复状态1到5就可以准确实现机器人整体的向上爬行。整个爬行过程中,清洁刷一直处于抱紧杆体的状态,从而对杆件进行清洁。改变上机械手和下机械手控制电机的正反转顺序,就可改变机器人的爬行方向。
在对杆件某一部位进行反复清洁时,控制下机械手一直处于夹紧杆体状态,控制上机械手处于松开杆体状态,控制曲柄连杆控制电机处于持续工作状态,上清洁刷就会在该杆件的相应部位进行反复上下运动,从而实现反复清洁。
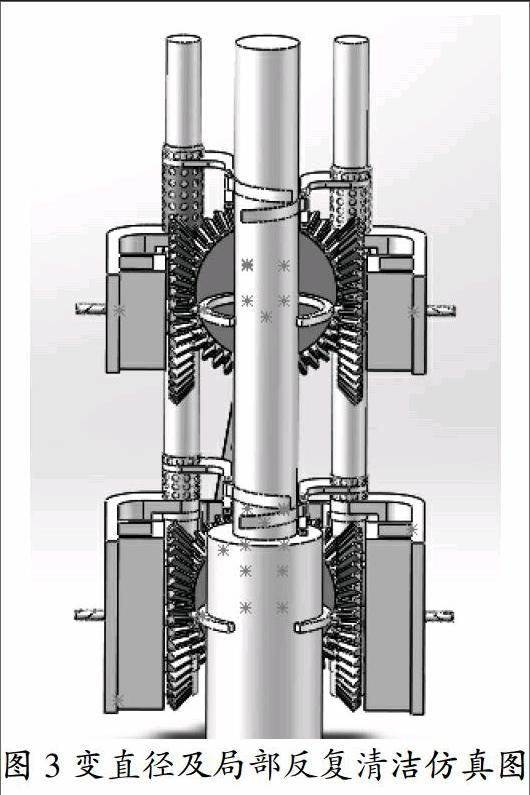
3 爬杆机器人的仿真
爬杆机器人变直径及局部反复清洁仿真示图如图3所示。
通过变直径及局部反复清洗的仿真,验证了该爬杆清洁机器人可以很好地实现对变直径杆件的清洗,并且还可对杆件的某一局部进行反复清洗,很好地实现了预期的设计。
4 结束语
本文设计的适用不同直径的仿生爬杆机器人具有如下特点。(1)设计提出了一种仿生机器人自动爬杆机构,利用上、下端机械手轮流夹紧杆体,采用曲柄连杆机构使机器人躯干产生伸缩动作,实现机器人的爬杆动作,具有结构简单、成本低、实用性强的特点;(2)当杆径发生变化时,根据机械手处的压力传感器的反馈信号来控制电机的转动,电机通过锥齿轮传动将动力传给滚珠丝杠,使丝杠前进或后退,实现对不同杆径的杆件进行夹紧和松开,从而解决了机器人对不同直径杆件的攀爬这一问题;(3)该机器人还可以通过控制上下机械手的电机,控制机械手状态,从而实现对杆件的反复清洗。
在对机器人的结构并阐明原理的基础上,利用Solid Works建立了机器人样机模型,并对装配体进行了仿真分析,仿真结果验证了机器人变直径结构及局部反复清洁原理的合理性。
参考文献:
[1]韓晓建,杨卫杰,高寰宇,等.基于连杆机构的四足仿生机器人运动学分析及足迹优化[J].森林工程,2017,32(1):52-58.
[2]付秀,辛颖,谷周澎.一种基于人机交互的树干智能涂白装置结构设计[J].森林工程,2016,31(5):55-58.
[3]杨春梅,郭明慧,马岩,等.步行割灌机行走部分结构设计与研究[J].森林工程,2016,31(5):48-54.
[4]郭志越,王伟,庄煜,等.基于Solidworks的农业信息采集系统设计[J].森林工程,2015(04):92-97.
猜你喜欢
科技创新与应用(2017年6期)2017-03-23
山东工业技术(2017年3期)2017-03-16
教育教学论坛(2016年52期)2017-03-12
汽车科技(2016年6期)2016-12-19
科技视界(2016年17期)2016-07-15
科技视界(2016年10期)2016-04-26
现代电子技术(2015年8期)2015-07-09