
时域硬约束下的汽车主动悬架H2/ H∞控制策略研究
2017-07-07 14:47:21张丽萍弓栋梁
辽宁工业大学学报(自然科学版) 2017年3期
张丽萍,弓栋梁
时域硬约束下的汽车主动悬架2/∞控制策略研究
张丽萍,弓栋梁
(辽宁工业大学汽车与交通工程学院,辽宁锦州 121001)
为了能够更好的改善汽车悬架的乘坐舒适性,采用了主动悬架/状态反馈控制策略。在充分考虑悬架系统时域硬约束的前提下,采用性能指标小于最小化性能指标的设计目标,从而避免选择加权系数。以四自由度半车模型为例,把影响车辆行驶平顺性的车身垂直加速度和俯仰角加速度作为性能指标进行优化。并通过时域和频域的仿真分析,验证该策略的有效性。
主动悬架;半车模型;时域硬约束;/控制
主动悬架能够在一定程度上改善汽车乘用者的乘坐舒适性,保证其操纵稳定性要求和汽车良好的行驶平顺性品质[1-2]。现代鲁棒控制的设计目标是找到在实际环境中为保证安全要求控制系统最小必须满足的要求。设计的控制器能够保证其控制性能[3]。为此,在保证主动悬架闭环系统稳定性的前提下尽量提高其乘坐舒适性是本文所要探讨的重点。文献[4]在进行主动悬架设计时提出了悬架系统的时域硬约束问题,充分考虑了悬架系统物理结构所能承受或提供的极限值。文献[5]~[6]中分别把主动悬架的状态反馈和输出反馈控制均归结为具有时域硬约束的鲁棒干扰抑制问题。对车辆的乘坐舒适性取得了较好的优化效果。文献[7]采用∞性能指标满足给定干扰扰制下的最小化2性能指标的设计目标,从而避免选择加权系数。
本文以四自由度半车模型为参考,充分考虑了悬架系统的时域硬约束,采用∞性能指标小于最小化2性能指标的设计目标的主动悬架2/∞状态反馈控制策略。并设计出相应的控制器。然后通过MATLAB/Simulink仿真分别在时域和频域验证该控制律的可行性和有效性。
1 半车模型
本文采用四自由度半车模型,如图1所示。
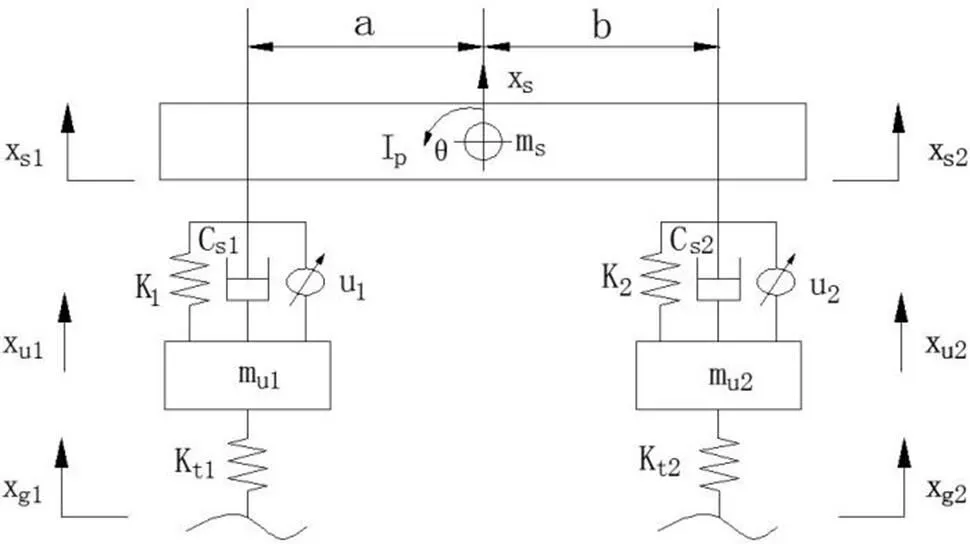
图1 半车模型
由拉格朗日法推导的动力学方程为:

其中:m1、m2分别为前后非簧载质量;为车身俯仰转动惯量;m为簧载质量,x为车身质心位移,为车身质心加速度;1、2分别为前后悬架刚度;K1、K2分别为前后轮胎刚度;C1、C2分别为前后悬架阻尼系数;、分别为车身质心至前后轴的距离;、分别为前后悬架作动器控制输出力;、分别为前后非簧载质量位移;、为前后非簧载质量速度;、分别为前后非簧载质量加速度;、分别为前后路面垂向位移;为车身俯仰角,为车身俯仰角加速度。
选取的状态向量

(2)
考虑到悬架系统的时域硬约束,需满足悬架动行程保持在可用范围,从而避免撞击限位块[4-5]。式中:代表悬架的最大动行程。

考虑车辆的操纵稳定性的要求,轮胎的动载荷不超出其静载荷。式中,,;、分别代表前后悬架部分的簧载质量
(4)
液压伺服机构输出阀值限制,要求控制输入不超出其阀值。式中,表示执行器输出阀值。
(6)



2 控制器设计
本文设计一个主动悬架2/∞状态反馈控制律,使得闭环系统是渐近稳定的。设计中从干扰输入到被控输出∞的闭环传递函数的∞范数小于, 并最小化2性能指标[7]。设计的状态反馈控制律为:

把控制律式(8)代入式(7),可得主动悬架闭环系统状态空间方程:
(9)
该闭环系统满足以下设计目标:
(1)闭环系统渐进稳定。

3 实例验证
为了验证主动悬架2/∞状态反馈控制策略的可行性和控制效果,把设计出的控制器与之所对应的被动悬架在时域和频域进行仿真对比分析。
根据国际标准ISO2631.3,人体对4~8 Hz的垂直振动和1~2 Hz的水平振动最敏感。因此,在进行频域分析时可把车身垂直加速度在4~8 Hz的优化情况,俯仰角加速度在1~2 Hz的优化情况作为车辆舒适性的主要参考依据。
路面输入模型采用积分白噪声,以=20 m/s的车速行驶在B级路面上,路面不平度系统和参考空间频率相应的参数取值为别为0=64×10-6m3,0=0.1 m-1。
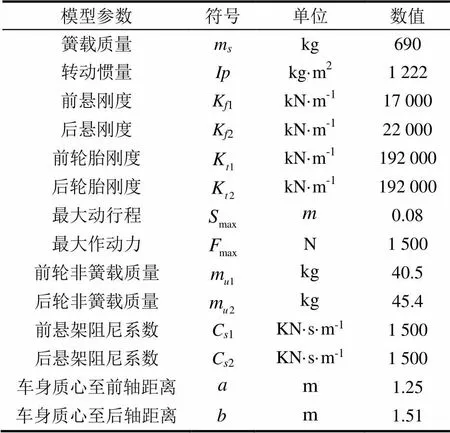
表1 半车模型参数

3.1 仿真结果分析
为了对比分析方便,首先给出主动悬架和被动悬架的相关优化参数的均方根值。

表2 均方根值表
汽车质心垂直加速度时域和频域仿真对比结果如图2~3所示。
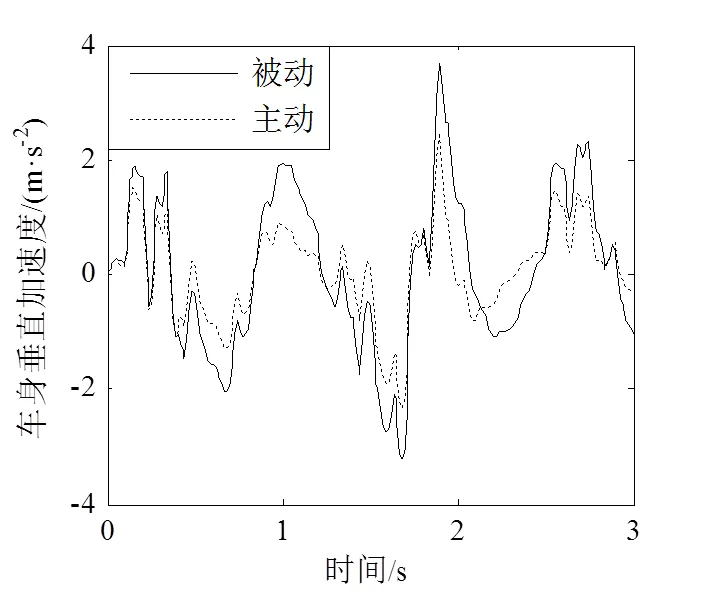
图2 车身垂直加速度时域响应

图3 车身垂直加速度功率谱密度
从图2时域图形可以看出,相比于被动悬架,主动悬架2/∞状态反馈控制对影响车辆行驶平顺性的车身垂直加速度具有较好的控制优化效果。从图3频域图形来分析,主被动悬架在车身固有频率和车轮固有频率附近均出现共振峰;它们的高频共振的峰值很相近,但主动悬架有效减小了低频共振的峰值,其包括的面积也有效减小,相应降低了其均方根值,从而提高了主动悬架的乘坐舒适性。在关键频域4~8 Hz范围内主被动悬架的质心处垂直加速度功率谱密度都相对较小;与被动悬架相比,主动悬架减小了在该频段内的输出响应。因此,主动悬架对其达到了良好的控制效果,提高了汽车的乘坐舒适性。
汽车悬架的俯仰角加速度的时域和频域仿真对比结果如图4~5所示。从图4时域图形可以看出,相比于被动悬架,主动悬架2/∞状态反馈控制降低了对影响车辆行驶平顺性的俯仰角加速度的输出响应,达到了较好的控制优化效果。从图5频域图形来分析,主被动悬架在两个固有频率处均出现了峰值;在高频共振时,与被动悬架相比,主动悬架的输出响应稍有升高,也就是说在车轮固有频率附近激振时其乘坐舒适性有所弱化;但在关键频域1~2 Hz范围内的低频共振时,主动悬架峰值明显减小,其包围的面积也相应减小,从而减小了其均方根值。因此,主动悬架实现了对车身俯仰角速度的的较好的控制效果,提高了汽车的乘坐舒适性。
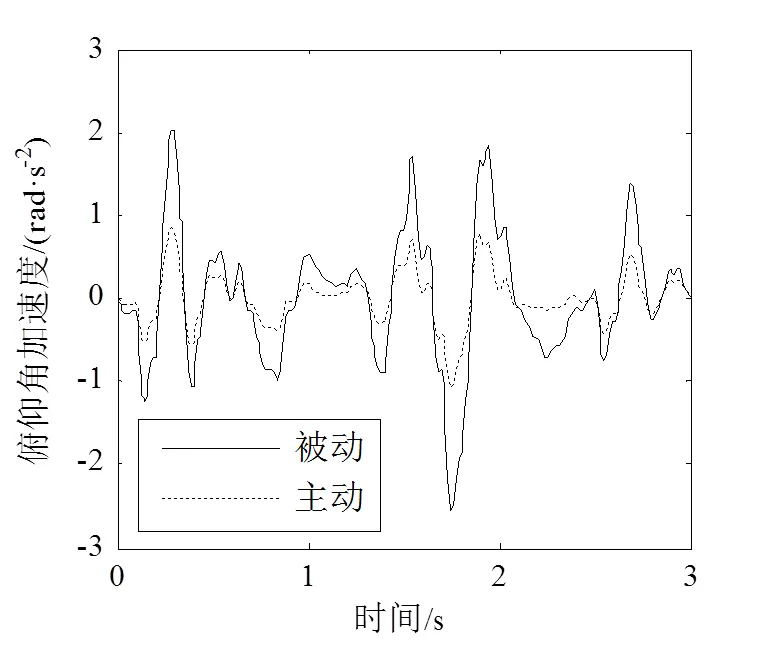
图4 俯仰角加速度时域响应
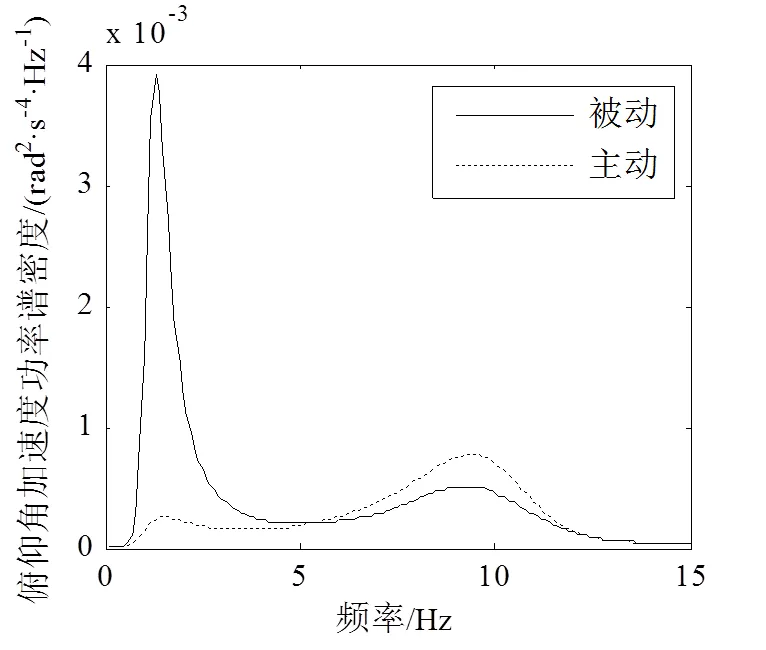
图5 俯仰角加速度功率谱密度
汽车悬架的前后轮相对动载荷的频域仿真对比结果如图6~7所示。
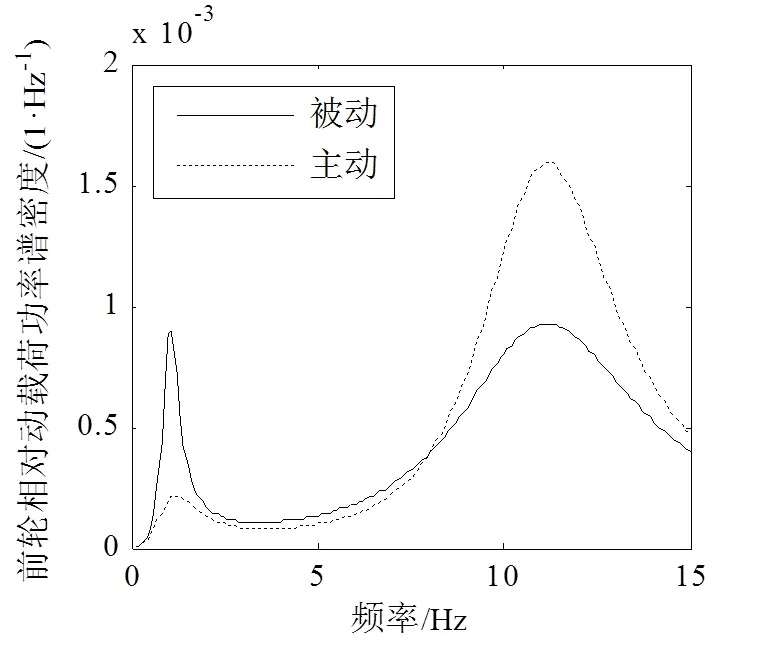
图6 前轮相对动载荷功率谱密度

图7 后轮相对动载荷功率谱密度
从图6、7前后轮相对动载荷频域图形来分析,相较于被动悬架,主动悬架的前后轮相对动载荷功率谱密度响应均在车身共振频率处减小,车轮共振频率处的峰值增大;结合表2中的前后轮相对动载荷均方根值可知,其相应包括的面积都有所增大,振动能量增加,前后部车轮的跳动都有所加剧,但仍在可接受的范围之内;汽车的乘坐舒适性的提升牺牲了部分轮胎动载荷性能。
4 结论
本文充分考虑了主动悬架系统的时域硬约束,将其归一化后作为用∞性能指标进行控制约束,把影响汽车乘坐舒适性的参数做为2性能指标进行重点优化。通过与被动悬架在时域和频域的仿真对比分析可以得知,该策略对车辆的乘坐舒适性有一定的改善效果,能够保证汽车良好的行驶平顺性品质;总之,该控制策略是完全可行和有效的。
[1] 余志生. 汽车理论[M]. 北京: 机械工业出版社, 2009.
[2] 喻凡, 林逸. 汽车系统动力学[M]. 北京: 机械工业出版社, 2006.
[3] 俞立. 鲁棒控制: 线性矩阵不等式处理方法[M]. 北京:清华大学出版社, 2002.
[4] Chen H, Guo K. An LMI approach to multiobjective RMS gaincontrol for active suspensions[C]. American ControlConference, 2001: 4: 2646-1651.
[5] 陈虹, 马苗苗, 孙鹏远. 基于LMI优化的主动悬架多目标控制[J]. 自动化学报, 2006, 32(4): 550-559.
[6] 陈虹, 马苗苗, 孙鹏远. 主动悬架H2/广义H2输出反馈控制[J]. 控制理论应用, 2007, 24(5): 790-794.
[7] 陈建军, 葛如海, 王斌. 基于LMI的主动悬架混合2/∞控制[J]. 车辆与动力技术, 2012(2): 40-43.
责任编校:刘亚兵
Research on2/∞Control Strategy for Vehicle Active Suspension Under Time Domain Constraints
ZHANG Li-ping, GONG Dong-ling
(Automobile & Transportation Engineering College, Liaoning University of Technology, Jinzhou 121001, China)
In this paper the active suspension2/∞state feedback control strategy is adopted in order to improve the ride comfort of the vehicle suspension system. Considering the time domain hard constraints of the suspension system, the design target with the∞performance index less thanminimized2performance index is adopted, so as to avoid choosing weighting coefficient. Taking four degree of freedom half car model as an example, the vertical acceleration and pitch angle acceleration of the vehicle that affect the ride comfort of the vehicle as2performance index are optimized. Through time domain and frequency domain simulation analysis, the effectiveness of the proposed method is verified.
activesuspension; half-car model; time domain hard constraints;2/∞control
10.15916/j.issn1674-3261.2017.03.005
U270.1
A
1674-3261(2017)03-0157-04
2017-02-16
辽宁省软科学研究计划项目(JP2016017)
张丽萍(1979-),女,辽宁营口人,副教授,博士。
猜你喜欢
石油沥青(2021年1期)2021-04-13 01:31:08
雷达学报(2018年3期)2018-07-18 02:41:34
建筑热能通风空调(2018年5期)2018-07-09 03:16:38
池州学院学报(2017年3期)2017-10-16 01:38:35
制冷技术(2016年4期)2016-08-21 12:40:30
测绘科学与工程(2016年4期)2016-04-17 06:51:14
消费者报道(2016年3期)2016-02-28 19:07:32
火控雷达技术(2016年1期)2016-02-06 02:17:55
无线电通信技术(2015年3期)2015-12-23 11:37:02
电测与仪表(2015年3期)2015-04-09 11:37:24
