
船舶快速搭载新型工装
——数控脚手架
2017-06-29 08:25:52郑绍春刘勇杰罗达钊
造船技术 2017年3期
郑绍春, 刘勇杰, 罗达钊
(武汉理工大学 交通学院, 湖北 武汉 430063)
船舶快速搭载新型工装
——数控脚手架
郑绍春, 刘勇杰, 罗达钊
(武汉理工大学 交通学院, 湖北 武汉 430063)
为了实现船舶快速搭载,提出一种新型工装——数控脚手架,从应用角度论述其设计考量、技术优势与使用方法,对其应用所产生的社会与经济效益进行分析,得出可有效缩短船舶搭载时使用船坞(船台)以及交船的周期,并从造船效率提升中得到可观经济回报的结论。
快速搭载;工装;高空作业平台;数控脚手架
0 引言
实现船舶快速搭载从而有效地缩短造船周期、提高船厂生产效率与竞争力是业内科研技术人员研究的重要课题[1]。船舶建造施工过程中,需要在船台、船坞等位置为施工人员搭建施工平台,当前比较先进的工装技术为韩国所采用的高空作业车[2-3]、轨道式吊篮及装配式一体化脚手架[4-5]。目前,我国少数船厂能应用这一技术,因为他们能将分段制造精度控制在允许范围内。但其他多数船厂分段制造精度控制难以实现,通常使用大量脚手架再配备少量的立面挂吊篮和悬臂式高空作业车,主要原因是多数船厂采用船体分段制造外包管理模式,施工队伍人员不稳定,导致船体分段加工精度无法得到有效控制。通常多数船厂在船艏、船艉施工时,由于不便使用立面挂吊篮和悬臂式高空作业车,常见解决问题的方式是搭建阶梯式脚手架,且为了加快制造周期,采取船体作业多班组同时施工,船体施工面大量使用脚手架,如图1所示。
脚手架工装的主要优点是:构造简单、成本低,可搭建固定静止的立体工作面且不受场地限制。当然其存在的问题也非常突出:搭、拆、运、存等环节费时、费力、费场地,影响船台/船坞使用周期,施工面混乱,拆卸不当会破坏船体漆面,还存在安全隐患。悬臂式高空作业车(见图2)可灵活移动、避障性佳,但不能替代脚手架,承载能力弱、工作面小、靠不断移动构成立体工作面,多台实时协同作业较难实现,需专人操控、施工效率低。

图1 脚手架在船台/船坞的应用

图2 悬臂式高空作业车在船台/船坞的应用
脚手架与悬臂式高空作业车各有优缺点,现将二者优点相结合,并根据我国船厂实际情况,提出一种相对静止并可快速构建、灵活移动的作业平台,即船舶快速搭载新型工装——数控脚手架。
1 数控脚手架设计考量
数控脚手架应具备脚手架的特征与功能。脚手架通常依船体型线而搭建,尤其是在船艏、船艉分段拼接时用,因此结构设计需考虑:(1) 船体型线特征(见图3);(2) 船体分段组装焊缝特征(见图4~图8);(3) 主尺度:长度大于分段长度,宽度满足能在船体支柱间穿越而不发生碰撞,伸缩高度低至墩面,高至主甲板;(4) 移动灵活,能在船体支柱间穿梭;(5) 满足相关规范要求(如GB/T 9465-2008高空作业车,JB 8716-1998汽车起重机和轮胎起重机安全规程,GB 3766-1983液压系统通用技术条件等)。综合上述因素,再对船体分段组装焊缝形态进行优化,确定平台结构形式为“L”型(见图9)、滑动上层平台变为反“L”型(见图10)或“U”型(见图11),数控脚手架作业平台随分段在船体装焊高度位置升降,最小模式主尺度(长×宽×横高/纵高,见图12):16 000×2 500×1 600/2 400 mm。
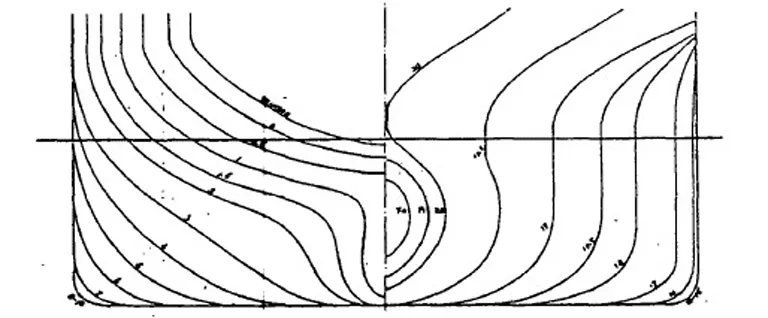
图3 船体型线特征
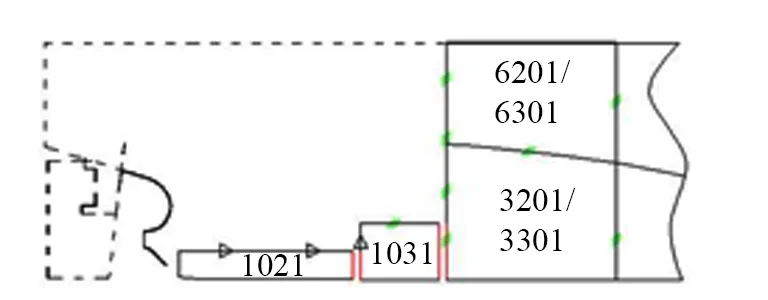
图4 “I”型焊缝
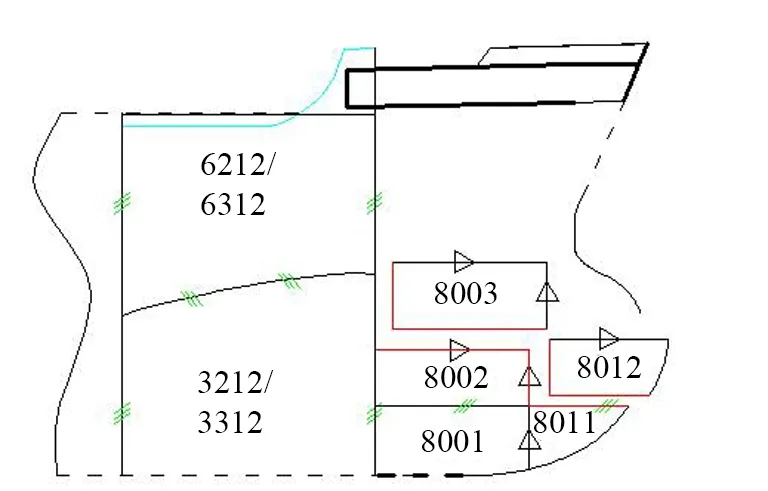
图5 “L”型焊缝
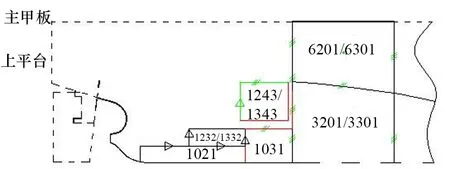
图6 反“L”型焊缝
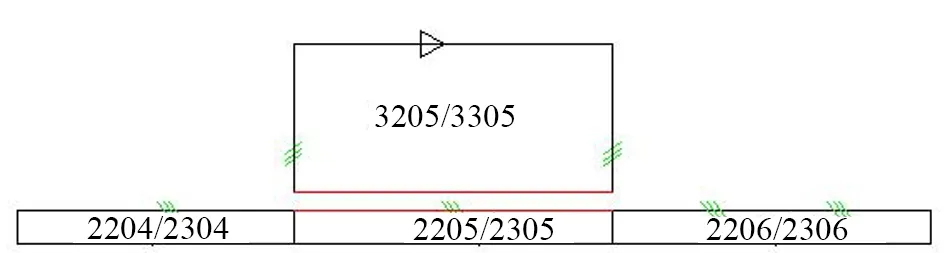
图7 “-”型焊缝
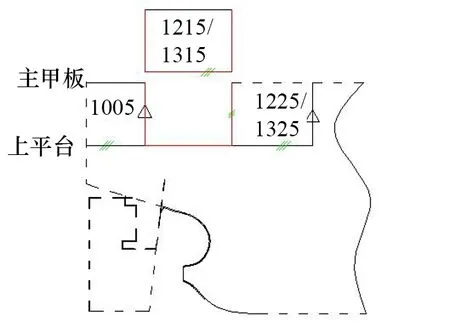
图8 “U”型焊缝
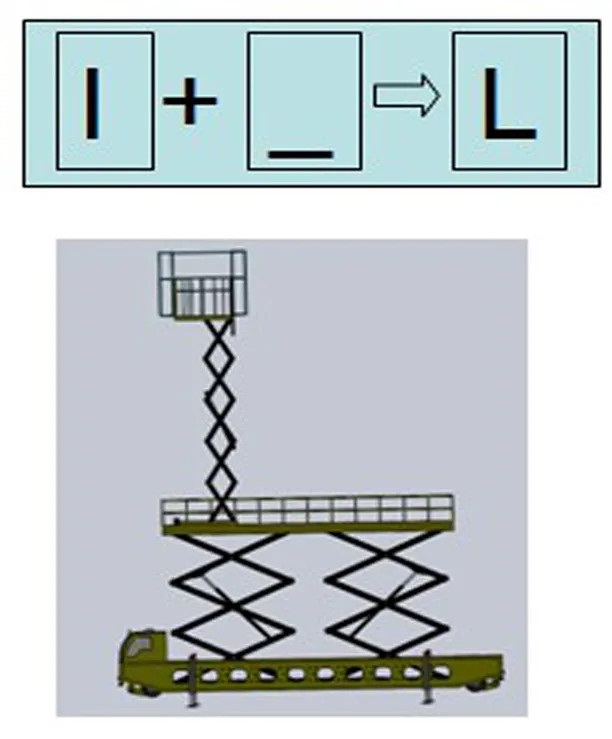
图9 “L”型结构形式
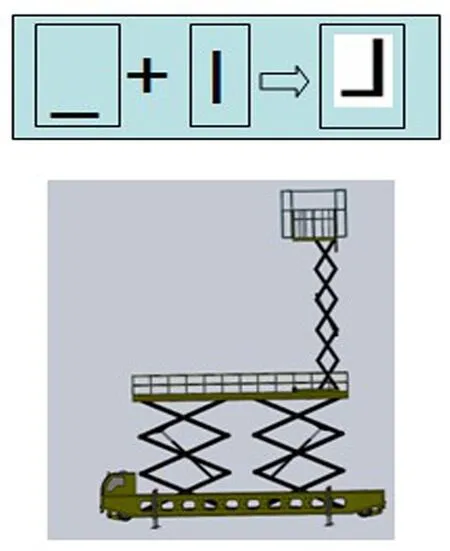
图10 反“L”型结构形式
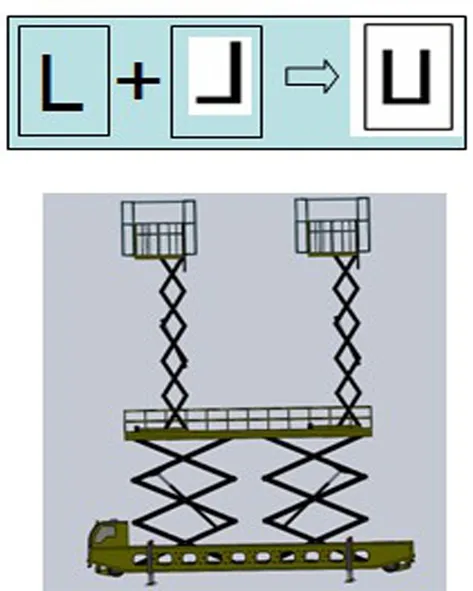
图11 “U”型结构形式
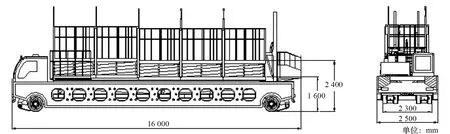
图12 数控脚手架作业平台最小模式主尺度
2 数控脚手架应用优势
由图13可知,使用悬臂式高空作业车实施分段装焊时,建立作业面与装焊是同时进行的。在作业过程中需在移动中人工建立作业面,作业点移动按球坐标方式控制,从一点移到另一点需控制3个参数,需配1名专职操作手。脚手架建立作业面与装焊是分步进行的,脚手架按焊缝形式搭建,装焊时作业面固定不变,不能因人身高不同而进行实时调整。数控脚手架集中了脚手架与悬臂式高空作业车的优点,动静相结合。当数控脚手架自行移动到船体分段待装配位置时,能够快速构建起像脚手架一样相对静态的作业平台。若从一点动态移到另一点,由于数控脚手架是按直角坐标方式控制的,想要实现一维焊缝拼装移动,只需控制1个参数实现一维移动即可;若要实现二维焊缝拼装移动,只需控制2个参数实现二维移动即可,大多数焊缝属于二维情况。它还能因人而异动态调整施工舒适度,可通过人工与智能相结合的方式进行实时控制。此外,自行式数控脚手架移动具有船体分段转运车的多模式转向功能,除具有一般汽车转向模式外,还有可横行、斜行、原地转圈、八字转向和双向行驶等功能,可在狭窄的船位之间自由穿梭。
自行式数控脚手架具有以下功能特点:(1) 人工或智能地快速构建相对静态的立体作业平台;(2) 一母多子平台,构造平台形式灵活,能满足不同工位作业需要,方便施工;(3) 舒适度可实时进行动态调整;(4) 多模式转向,移动灵活自如。
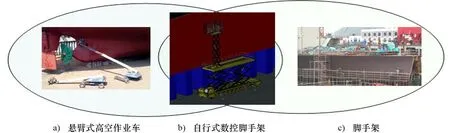
图13 船舶搭载工装
3 数控脚手架使用方式举例
自行式数控脚手架可根据使用需要选择一母一子、一母二子和一母多子作业平台。根据施工状态从下列方法中选择一种。
(1) 焊缝形态使用法。船体横剖面小曲率沿船长方向放置,依分段焊缝形态展开(见图14),作业平台具有脚手架形态特征。

图14 焊缝形态使用法
(2) 阶梯式脚手架使用法(见图15)。船体横剖面大曲率沿船宽方向放置,依分段横向大接缝形态展开,作业平台具有阶梯式脚手架形态特征。
(3) 最低模式使用法(见图16)。数控脚手架降到最低,按“J”型接缝形态展开,满足船体底部施工作业条件。
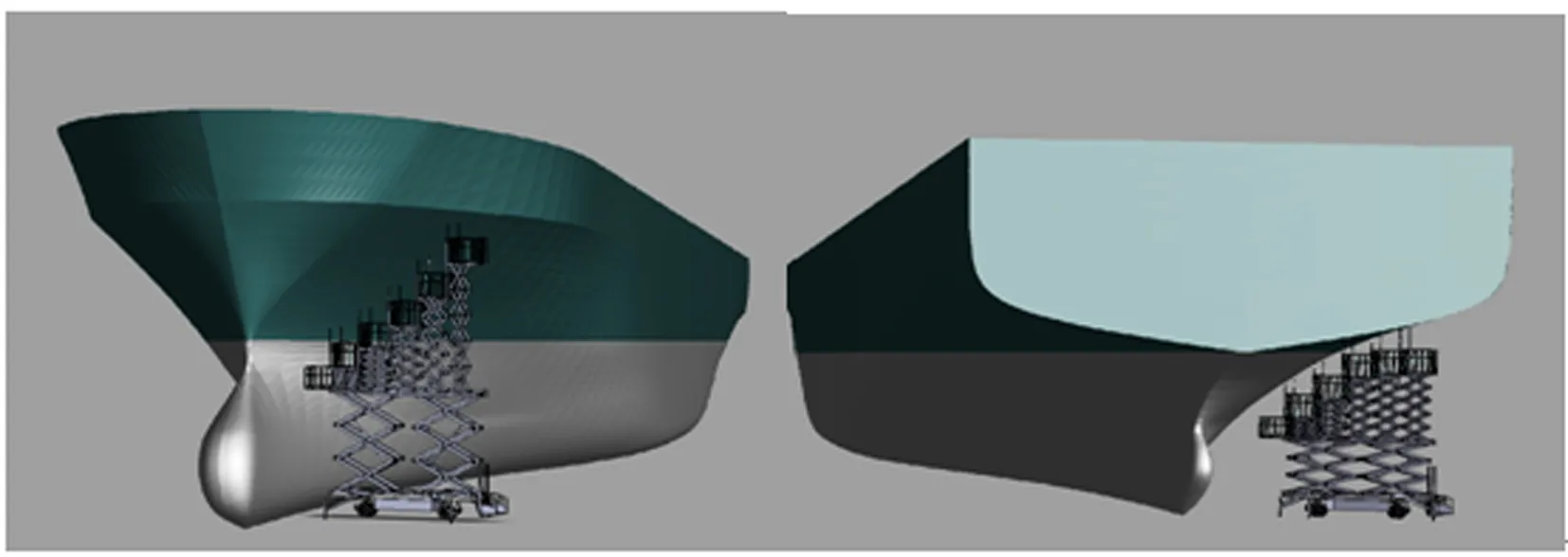
图15 阶梯式脚手架使用法
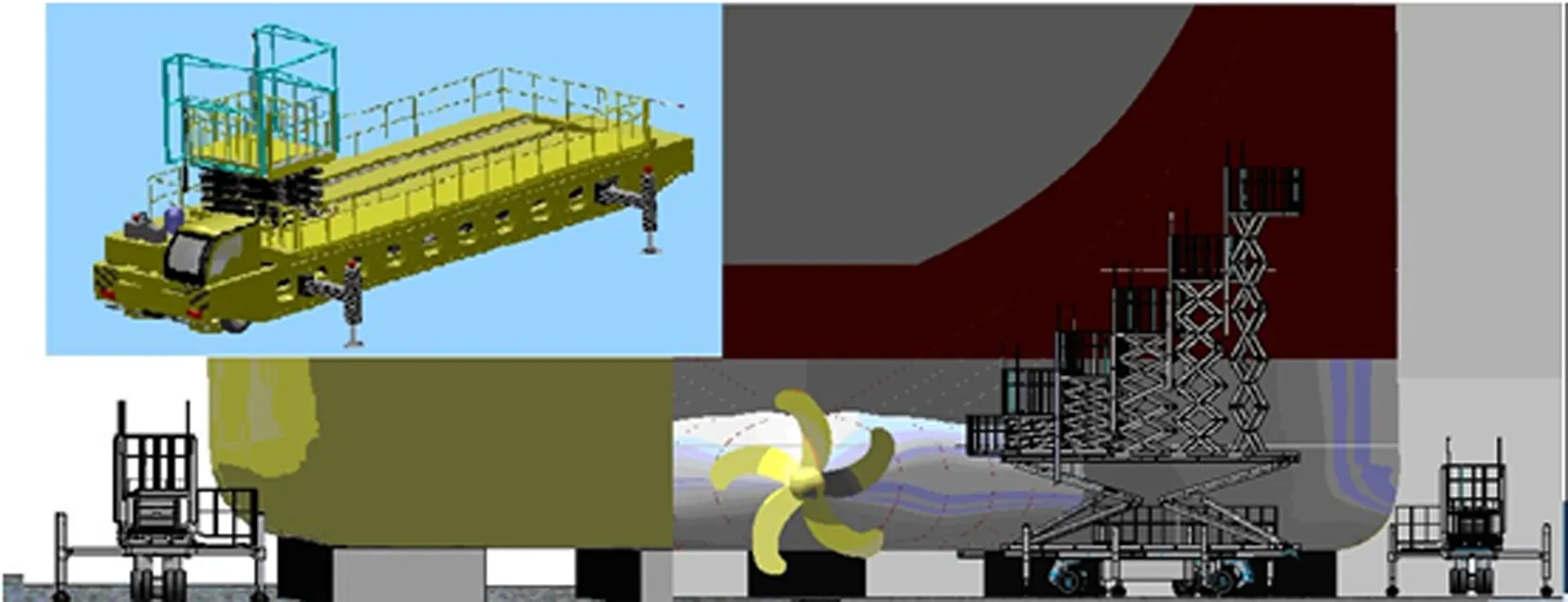
图16 最低模式使用法
4 数控脚手架应用的社会与经济效益分析
自行式数控脚手架主要在船厂船舶总段建造、货舱内施工、船台/船坞搭载等施工现场为施工人员提供快捷高效、方便舒适、安全可靠的作业平台,是以班组为作业单位的施工人员所配备的高端工装设备。它运用了数字自动化、智能化科学技术,施工工人可通过无线遥控操控平台,还可单人通过“数字脚套”以有线的方式实现边施工边调控,人工与智能相结合地为施工工人提供舒适的施工平台,其符合了未来船厂“以人为本、数字自动化绿色造船、快乐造船”的发展理念,为提升造船工装技术水平与船厂形象、改善施工工人工作条件、增强企业向心力提供了硬件基础。
从经济角度看,自行式数控脚手架的应用减少了搭建、转运、库存脚手架的人员和人工成本以及占用船台/船坞周期的制约因素,改善施工人员的施工环境,降低施工人员的事故风险,其应用的最大价值在于缩短船坞(船台)占用时间和交船周期,它的投入将从提升造船效率中得到可观回报。
[1] 丁伟康.船舶快速搭载有效地缩短了造船周期[C]//中国造船工程学会造船工艺学术委员会2011造船企业精益生产学术研讨会,2012.
[2] 金治勇.中国高空作业机械悄然前行[J].建筑机械化,2012,2:19-21.
[3] 周升友.“先进装备”提升造船效率[N].中国水运报,2004-06-09.
[4] 刘恩旭.现代造船模式下大型船舶建造工法研究[D].哈尔滨:哈尔滨工程大学,2011.
[5] 王永良,秦耀良,董大栓,等.造船新技术在修船领域中的应用[J].造船技术,2014,2:47-52.
An Efficient New Type Erection Equipment of Shipbuilding:Numerical Control Scaffold
ZHENG Shaochun, LIU Yongjie, LUO Dazhao
(School of Transportation, Wuhan University of Technology, Wuhan 430063, Hubei, China)
A new type erection equipment is put forward,which is numerical control scaffold used to make ship erection more efficient. Its design consideration, technical advantages and using methods are discussed from the view of application. Besides, the social and economic benefits taken by the application of the new equipment are analyzed. It can be concluded that the value of its application is saving time for berth period or even shipbuilding period by efficient ship erection and considerable benefits are brought for shipyards from the improvement of manufacturing efficiency.
efficient erection; craft equipment; aerial working platform; numerical control scaffold
郑绍春(1957-),男,高级工程师,研究方向为船舶先进制造技术
1000-3878(2017)03-0059-05
U671
B
猜你喜欢
建材发展导向(2022年10期)2022-07-28 03:04:16
建材发展导向(2021年20期)2021-11-20 05:43:16
建材发展导向(2021年6期)2021-06-09 05:57:02
电子制作(2018年19期)2018-11-14 02:36:42
造船技术(2016年6期)2017-01-13 01:02:37
新课程研究(2016年2期)2016-12-01 05:53:17
工业设计(2016年6期)2016-04-17 06:42:51
航运交易公报(2016年8期)2016-03-21 11:08:03
中国卫生(2015年12期)2015-11-10 05:13:34
建筑机械化(2015年7期)2015-01-03 08:08:58
