
打印平台可翻转的3D打印机研发
2017-06-28 16:07孙慧超闫龙威曲兴田王宏一
实验技术与管理 2017年6期
孙慧超, 闫龙威, 曲兴田,王宏一
(吉林大学 机械科学与工程学院,吉林 长春 130022)
打印平台可翻转的3D打印机研发
孙慧超, 闫龙威, 曲兴田,王宏一
(吉林大学 机械科学与工程学院,吉林 长春 130022)
从节省材料、增加稳定性、填充支撑结构等几个方面对结构进行优化,以及为了解决当前一些有悬臂或者空腔结构又不允许添加内部支撑结构的打印件无法制造的问题,设计出一种工作平台可翻转的3D打印机,介绍了其结构组成以及工作原理;利用ANSYS仿真软件对系统建立仿真模型,得到工作平台结构和喷头结构的应力分析,验证了设计方案的可行性,从而实现工作平台可翻转的可能性,完成无支撑结构的曲面结构打印以及对打印件结构优化设计。
3D打印机; 结构分析; 模型仿真; 翻转平台
3D打印制造就是将三维模型分解成二维层状结构,逐层累加制造。输入三维模型文件,使用可黏结PLA或ABS原材料分层打印,层层累加实现三维模型的制造。3D打印由于其独特的优势,如制造复杂产品模型不增加成本、制造后无需组装、材料无限组合以及精确的实体复制等,成为了企业研发的主要对象[1-4]。并且3D增材制造对于加工复杂模型以及加工多样化模型来讲其生产过程都是相同的,并且其可以进行一体化加工和多材料同步一体化加工,大大增加了模型制造的多样性,以满足大众对于产品个性化的需求。当前研发的3D打印机,对于打印件存在悬臂以及空腔结构时,为了克服重力的影响采用光敏树脂材料或特殊材质进行支撑处理,从而存在强度问题[5]、耗材问题[6]、稳定性问题等[7]。本文通过设计一种打印平台可翻转的3D打印机来解决上述问题。
1 系统的结构组成和工作原理
3-SPS并联机构[8-9]为一种具有曲面加工特性的3D打印机的核心部件。如图1所示,3-SPS工作平台并联机构由动平台、3条工作平台连接杆和3个下夹具块组成,下夹具滑块为移动副P,工作平台连接杆与工作平台之间为球铰副S连接,工作平台连接杆与下夹具块之间为球铰副S连接。3个下滑块的移动副P为3-SPS并联机构的主动副,工作平台连杆与下滑块和工作平台的球铰副S为从动副。3-SPS并联机构可以实现3D打印过程中打印平台上已完成部分姿态和打印角度的调整。工作平台的运动为沿X轴翻转和沿Y轴翻转。
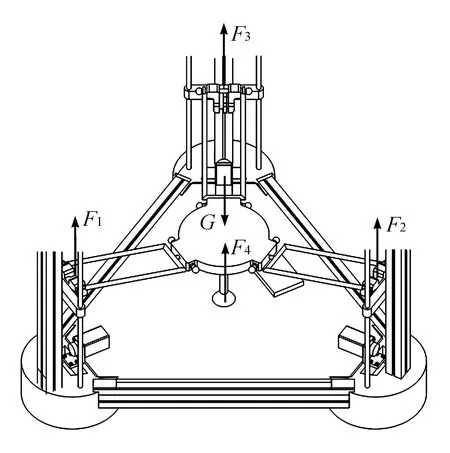
图1 工作平台并联机构图
如图2所示,3-SPS喷头并联机构由喷头组件、上夹具块、滑块和支撑杆组成,上夹具块固定在滑块上,在光杠上滑动为移动副P,喷头与支撑杆之间为球铰副S连接,上夹具块与支撑杆之间为球铰副S连接。3个上夹具块的移动副P为3-SPS并联机构的主动副,支撑杆与上夹具块和喷头结构的球铰副S为从动副。3-SPS并联机构可以实现3D打印过程中喷头3个方向的平动。喷头的运动沿X、Y、Z轴平动。

图2 喷头并联机构图
2 工作空间的动力学计算
并联机构的工作空间是评价并联机构工作能力的一个重要指标[10-11]。一种具有曲面加工特性的3D打印机中的3-SPS并联机构的工作空间直接决定了3D打印过程中打印件的高度与翻转打印过程中翻转打印高度。现有并联杆式3D打印机只能垂直打印,只需要控制垂直高度就可以确定打印工作空间。文中所述具有曲面加工特性的3D打印机工作平台通过并联机构实现X、Y轴翻转,由于打印空间为正三棱柱,打印件不可超过打印机外边界,所以打印高度需要通过打印机翻转角度来确定,从而确定工作空间。
具有曲面加工特性的3D打印机的主要工作结构是在并联杆式3D打印机的结构上增加工作平台翻转结构。其工作平台位于正三角形底座的中心上,其工作沿X、Y轴翻转。具体工作过程中X轴和Y轴翻转时需要分开讨论。在XZ平面和YZ平面内分析X轴翻转时翻转角度和打印高度的关系,以及Y轴翻转时翻转角度和打印高度的关系,从而得到打印角度和最高打印高度之间的关系。已知3D打印机整体结构高为600 mm,底面正三角形边长为286 mm。其工作过程中,半径为r的工作平面沿X、Y轴最大翻转角度为30°。在其工作初始位置,工作平台距离底座为H。在不实现反转打印时,垂直打印极限高度为L。在初始设计时,r=40 mm、H=80 mm、L=410 mm。
当工作平台沿Y轴翻转时,计算得到工作平台翻转后X轴方向极限距离x=191 mm。
则工作过程中打印高度l与工作平台翻转角度η之间的关系为

当工作平台沿X轴翻转到最大角度即30°时,最大打印高度为

当工作平台沿Y轴翻转时,打印高度l与工作平台翻转角度λ之间的关系为

当工作平台沿Y轴翻转到最大角度即30°时,最大打印高度为
用Matlab将打印角度与打印高度图像化,输入程序:
gama=linspace(0,pi/6,20)x=191;r=40;y=247.4;L=(x-2*r.*cos(gama))./2.*sin(gama);subplot(1,2,1)plot(gama,L,′-.r′)L=(y-2*r.*cos(gama))./2.*sin(gama);subplot(1,2,2)plot(gama,L,′-.b′)
从得到的工作平台沿X轴与沿Y轴翻转时,翻转角度与打印极限高度的关系(见图3)可知,打印过程中打印高度随工作平台翻转角度增大而减小。在图3中,工作平台沿X、Y翻转角度在11°~30°(0.2~0.5 rad)时,打印高度变化比较小,即打印机工作过程中最大打印高度波动很小,工作空间很稳定。工作平台沿X轴和Y轴翻转到极限位置时,最大打印高度为120.8 mm。当工作平台不旋转时打印最大高度为410 mm。打印工作之前调整打印高度时以X轴翻转为主要参考。

图3 工作平台沿X、Y轴翻转角度与打印最大高度之间关系曲线
3 工作平台翻转受力分析
具有曲面加工特性的3D打印机在进行曲面打印时,其工作平台按打印件形状进行倾斜翻转。其翻转分为沿X轴和沿Y轴翻转。当工作平台沿X轴翻转时,C3滑块固定不动,C1和C2滑块(图4中滑块未标)通过步进电机和同步带在光杠上运动。工作平台受力如图4所示,并联机构滑块受到同步垂直向上的力F1、F2、F3,工作平台上受到已完成的打印件的重力G,工作平台支撑杆对工作平台有垂直向上的支撑力F4。滑块对于连杆垂直向上的力可分解为沿杆的拉力F拉和垂直于杆的向上的力F垂,比如:F1拉=F1cosθ,F1垂=F1sinθ。
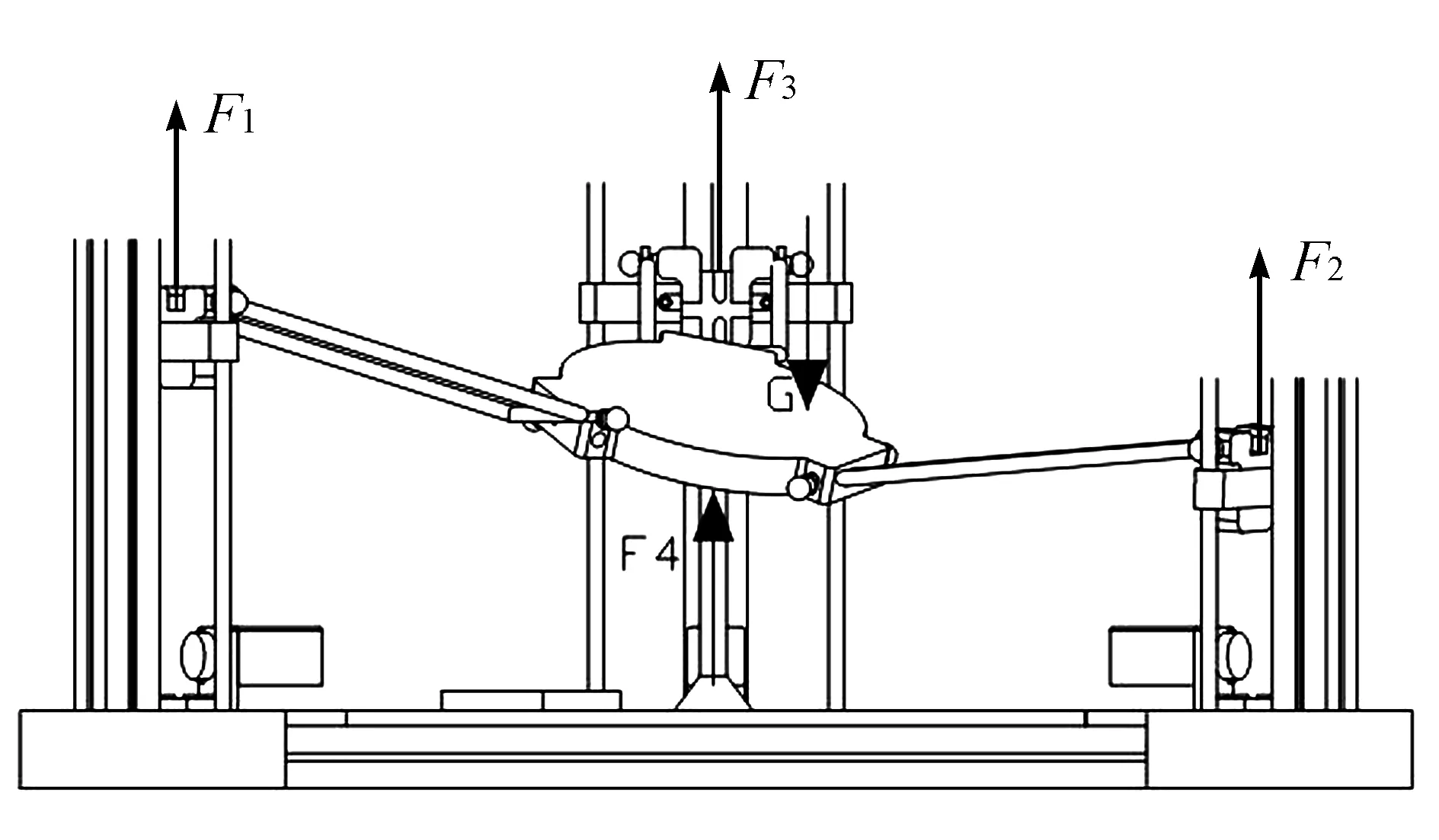
图4 工作平台沿X轴翻转受力图

图5 工作平台受力示意图
工作平面的受力分析见图5,将工作平面、连杆和支撑杆单独分析。工作平面受到连杆沿杆向上的拉力F1拉、F2拉、F3拉,支撑杆向上的支撑力F4以及工作平台上工件和其自身的重力G。由于工作工程中,当工作平台沿X轴翻转到最大角度即30°时,工作平台静止。可列X、Y、Z3个方向上的平衡方程以及工作平台X轴方向的转矩方程。
平衡方程得:
Z轴平衡方程:
F1cosθ1+F2cosθ2+F3cosθ3+F支=G
X轴平衡方程:
F1sinθ1cos 30°=F2sinθ2cos 30°⟹F1=F2
Y轴平衡方程:
F3cosθ3=F1sinθ1cos 30°+F2sinθ2cos 30°
X轴转矩平衡方程:
2F1sin(θ-λ)cos 30°R+F4Rcosλ=GRcosλ⟹
2F1sin(θ+λ)cos 30°+F4cosλ=Gcosλ
由空间轨迹可知:
将结构进行有限元仿真,其中具有曲面加工特性的3D打印机材料选为碳素钢Q235AF(Q表示屈服强度,235表示屈服强度数值,A表示质量等级为A级,F表示沸腾钢),其弹性模量为190~210Gpa,泊松比一般取0.3,密度为7.85 g/cm3。由于工作平台与喷头结构等效简化后造型简单,因此可以选用Mechanical,自动划分网格。当工作平台X轴翻转时打印最大高度为120.8 mm,打印材料PLA密度为1.05 g/cm3。则打印件最大重力G=6.24N。当前市面上喷头结构质量多为350g,即3.43N。在ANSYS当中在工作平台上加载6.24N垂直向下的力,在喷头结构上加载3.43N垂直向下的力。得到应力图见图6—图9。
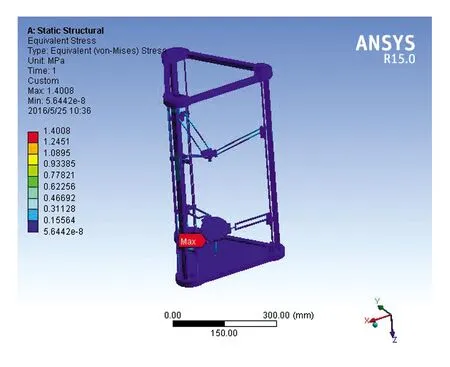
图6 X轴翻转机构整体应力图
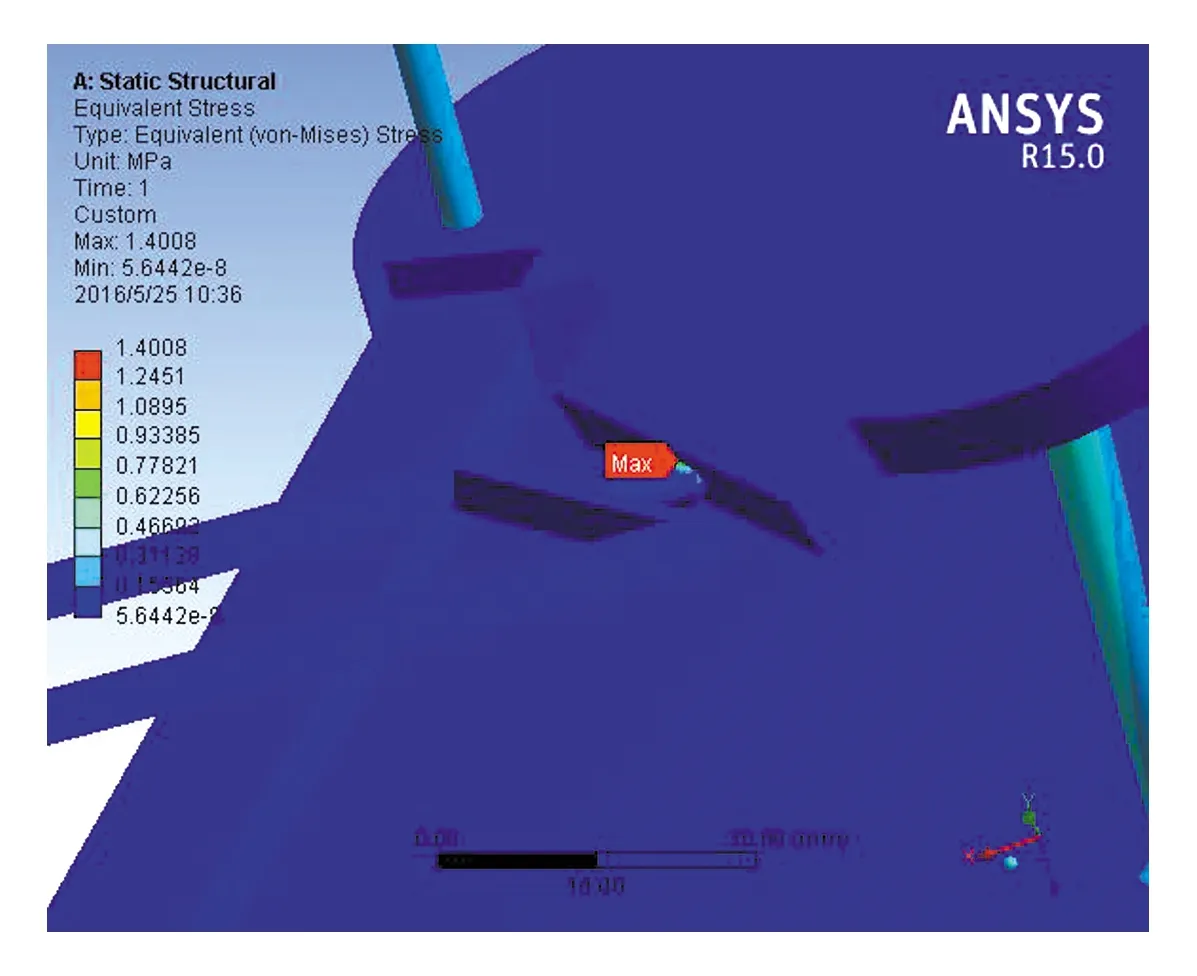
图7 X轴翻转并联杆工作平台应力图
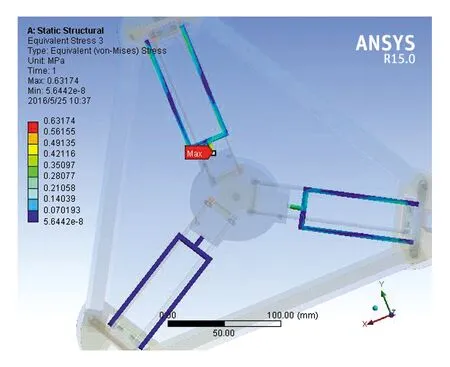
图8 X轴翻转工作平台连杆应力分析
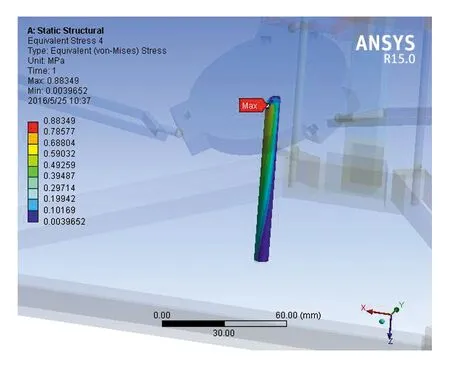
图9 X轴翻转工作平台支撑杆应力分析
从图6机构整体应力图中可以清楚地看到,打印机整体在打印过程中工作平台沿X轴翻转到最大角度静止时大部分应力在0.1 Mpa左右。由图8可看出,只有在工作平台与工作平台连杆连接处和工作平台支撑杆与底座连接处的应力突然变大。如图7所示,在工作平台连杆与工作平台连接处应力最大,应力最大为0.51 Mpa。由图9可知,工作平台支撑杆不均匀受力,应力最大一侧在0.7 Mpa左右,最小一侧在0.1 Mpa。在此工况下,工作平台连杆与工作平台支撑杆强度均满足要求。
4 结语
本文通过设计一种工作平台可翻转的3D打印机,来解决当前一些有悬臂或者空腔结构又不允许添加内部支撑结构的打印件无法制造的问题。分析了其结构组成和运动机理与以及并联方式。通过优化运动轨迹,确定工作空间以及运动极限位置。最后在CATIA中建立模型,在ANSYS中完成结构的应力分析,将为工作平台可翻转的3D打印机的动力学参数优化设计、动态特性等后续研究提供理论基础.
References)
[1] 王广春,袁圆,刘东旭.光固化快速成型技术的应用及其进展[J].航空制造技术,2011(6):18-21.
[2] 江静,祁文军,阿地力·莫明.快速成型技术在医学上的应用[J].机械设计与制造,2011(5):254-256.
[3] 宋建丽,李永堂,邓琦林,等.激光熔覆成形技术的研究进展[J].机械工程学报,2010(14):29-39.
[4] 艾青林,黄伟锋,张洪涛,等.并联机器人刚度与静力学研究现状与进展[J]. 力学进展,2012(5):583-592.
[5] Umetani N, Schmidt R. Cross-sectional structural analysis for 3D printing optimization[C] //Proceedings of SIGGRAPH Asia 2013 Technical Briefs. New York: ACM Press, 2013.
[6] Chen Y.3D texture mapping for rapid manufacturing[J]. Computer-Aided Design&Application, 2007,4(6):761-771.
[7] Christiansen A N, Schmidt R, Bxrentzen J A. Automatic balancing of 3D models[J]. Computer-Aided Design, 2015,58:236-241.
[8] 王南,赵乘康,高鹏,等.并联机构3-SPS/S的静、动态刚度性能研究[J].机械设计与制造,2013(8):213-215.
[9] 王庚祥,刘宏昭,原大宁.一种新型3-SPS/CR并联机构及其优化设计[J].机械科学与技术,2012,31(7):1094-1099.
[10] 程世利,吴洪涛,姚裕,等.6-SPS并联机构运动学正解的一种解析化方法[J]. 机械工程学报,2010,46(9):26-31.
[11] 张艳伟,韦斌,王南,等.空间转动3-SPS-S并联机构运动学性能分析[J]. 农业机械学报,2012,43(4):212-215.
Development of 3D printer based on reversible printing platform
Sun Huichao, Yan Longwei, Qu Xingtian, Wang Hongyi
(College of Mechanical Science and Engineering, Jilin University, Changchun 130022, China)
In order to optimize the structure from the following aspects: saving materials, increasing the stability, filling the supporting structures, etc., and in order to solve the current problem that some printing parts with the cantilever or cavity structures which are unallowable to add the internal support can’t be produced, the 3D printer based on a reversible printing platform is designed, and its structural composition and working principle are introduced. By using ANSYS simulation software, the simulation model for the system is established, the stress analysis of the working platform structure and the nozzle structure is carried out, and the feasibility of the design scheme is verified. The possibility that the working platform can be reversed is realized and the printing of the non-support curved surface structure and the optimized design of the structures of the printing parts are achieved.
3D printer; structural analysis; model simulation; reversible platform
10.16791/j.cnki.sjg.2017.06.025
2016-12-16
国家自然科学基金资助项目“叶片复杂曲面集成与制造研究”(51135006,51505185)
孙慧超(1981—),男,吉林长春,博士,工程师,研究方向为3D打印和机械产品创新设计
E-mail:sunhc@jlu.edu.cn
曲兴田(1962—),男,吉林德惠,硕士,教授,研究方向为先进制造技术.
E-mail:quxt@jlu.edu.cn
TP334.8
A
1002-4956(2017)06-0102-04
猜你喜欢
橡塑技术与装备(2021年23期)2021-12-13
装备机械(2019年4期)2019-12-26
中国新闻周刊(2017年23期)2017-07-12
中国机械工程(2017年12期)2017-07-03
发明与创新(2016年34期)2016-08-22
中国塑料(2016年7期)2016-04-16
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
中国塑料(2015年9期)2015-10-14
河南科技(2015年2期)2015-02-27
河南科技(2014年3期)2014-02-27
