
捕鱼拖网形状与张力特性的数值模拟与水槽试验
2017-06-27 01:31刘莉莉胡夫祥朱媛媛董舒闯
农业工程学报 2017年9期
刘莉莉,胡夫祥,万 荣,郑 基,高 敏,朱媛媛,董舒闯
捕鱼拖网形状与张力特性的数值模拟与水槽试验
刘莉莉1,2,胡夫祥3,万 荣4,5,郑 基1,2,高 敏3,朱媛媛3,董舒闯3
(1. 浙江海洋大学水产学院,舟山316004; 2. 浙江省海洋渔业装备与技术研究重点实验室,舟山316004; 3. 东京海洋大学,东京 1080075; 4.国家远洋渔业工程技术研究中心,上海 201306; 5. 上海海洋大学海洋科学学院,上海 201306)
为更好地利用数值模拟方法了解拖网的形状与张力变化特性,该文通过有限元计算方法和水槽试验的手段,以日本某四片式中层拖网模型为例,构建了拖网的水动力学特性数学模型,并进行了相应的水槽模型试验。通过计算值与试验值的比较,分析了拖网的形状变化(网口高度、网口宽度以及网身长度)、各部分受力变化(空纲拉力和拖网网衣目脚张力分布变化)以及相关的配线问题,说明仿真模型可以对拖网在水流中的变化进行有效模拟。拖网空纲力的试验值与计算值误差约为10%,网口高度、网身长度符合较好,网口宽度的平均误差小于10%。模型拖网网身中浮沉子纲、力纲及其周边网目受力较大,网囊部分受力较小,随着流速增加,上下网片比左右网片受力更大。同时,数值模拟计算可以为拖网配线提供量化依据,然而由于拖网类型多样,不同设计导致张力分布不同,故此需要具体类型具体分析。该研究结果表明,该文数值计算模型可以有效进行拖网的仿真模拟,为设计和改进拖网提供参考。
试验;计算机仿真;模型;拖网;形状;张力
0 引 言
拖网渔具由网衣、纲索以及属具组成,是一种具有网囊和网翼的移动过滤性网渔具[1-2]。拖网是中国各大海区的主要渔具之一,在中国海洋渔业中占据重要地位[3-5]。拖网的性能与网口张开、网口形状、网形伸展、网衣配线有着密切关系。其中,网口张开面积及网口形状会影响到在拖网拖曳过程中鱼类的入网情况[6-8];若局部网衣网形无法得到充分伸展,不仅浪费材料,而且也会增加阻力;而配线过粗时,在增大阻力的同时,也会提高生产成本,但配线过细时又会造成网身发生破裂[9]。
当前,海上实测和水槽模型试验是研究网具性能最为普遍的2种方法[10]。但是,海上实测对人力、物力耗费较大,受海况条件影响明显,更关键的问题是海上实测过程中无法对渔具形状进行准确判断[11]。水槽模型试验虽可以应用相似准则对渔具作业状态进行物理模拟,但是由于按比例缩小后的网衣模型尺度较小,很难对网身中局部网线的张力进行测量。
数值模拟计算作为与水槽模型试验相辅的研究手段,已得到了越来越多研究人员的关注。Hu等[12]通过数值模拟的方法建立了一个包含曳纲、网板、拖网在内的拖网系统,通过静力学解析,对拖网作业过程中拖速、网板深度、网袖间距之间的参数关系进行了分析。Lee等[13-14]在建立中层拖网系统的基础上,利用模糊逻辑法设计了拖网深度控制系统,以曳纲张力作为控制输入,建立一个简化模型以直观地了解拖网系统的变化,并分析拖网在不同拖速作用下形状的变化,包括网具高度、宽度及长度的变化。Prat等[15-16]针对拖网的整个系统建立简化模型,虽未计算网形及其在不同拖曳条件下的变化,但对曳纲张力、网板扩张和受力情况给出了一些相关结论。Sun等[17-18]模拟了拖网渔船在中层水域进行捕捞作业时的情况,对拖网、网板、曳纲、力纲以及渔船建立数学模型进行分析计算。Priour[19-21]通过有限元数值模拟的方法分析了在拖网作业过程中渔获物对整个拖网系统的影响。陈英龙等[22]运用集中质量法,对拖网网具系统进行网孔合并,且简化后进行仿真分析,并通过海上试验验证了其大型中层拖网系统数学模型的准确性。
在上述诸多研究中,一部分是从拖网系统整体的角度将模型进行了简化,其中,以考虑曳纲张力的居多,但较少涉及到网身各部分网线张力以及张力分布情况等问题,造成始终未提出一个合理的依据去划分拖网各部分网衣的配线问题,拖网设计时通常只能靠经验进行网衣配线。再者,相比于国外研究,中国在应用数值模拟方法开展对拖网的水动力学特性的研究方面尤显不足。
本文应用有限元方法,对不同流速下的拖网网形变化以及网身目脚张力分布进行计算与分析,且将结果以3D图像形式呈现,为中国拖网网型优化设计以及合理进行各部分网衣配线提供参考。
1 材料与方法
1.1 数值模拟方法
数值模拟采用有限元方法,根据文献[23-26]中的描述,考虑拖网在水流作用时会大位移变形,由此建立拖网在离散系统的总位能,表示如式(1)。根据最小位能原理,当这个离散体系处于平衡状态时其总位能取最小值,即和,从而可以得到关于单元节点位移D和张力g的矩阵表达式。
(2)
,=1,2,…,. (3)
式中D为节点的位移;为材料的杨氏模量;F为在第个节点上的作用力;A为第个网目脚的横截面积;T为作用于第个网目脚上的张力;L0为第个网目脚的初始长度;L为第个网目脚受力变形后的长度;为整个拖网系统结构的总自由度;为结构的总要素数。
式(2)的{}表示各个单元所受的外力,包括重力、浮力、沉力、水动力等。水动力部分则采用宫崎芳夫[27]的方法进行计算。
1.2 拖网模型
1.2.1 拖网模型的设计制作
1)该模型网以日本四片式中层拖网为母型网,采用PA网线进行编织,每片网衣均由横向8目,纵向21.5目构成,网目尺寸以及网线粗细均自网袖和网口处向网囊方向逐渐递减。
2)该模型网以网板安装处作为固定点,每个网板处分别牵引出一条上空纲和一条下空纲,每条长度2 m,分别连接于浮子纲和沉子纲的两端,由此共形成4个连接点。网身上,4片网衣缝合形成一个筒状,每片网衣连接处缝制一条力纲,总共4条力纲。另外,网口处设置浮子纲和沉子纲各一条。浮子纲上装配有12个浮子,每个浮子直径2 cm,均匀分布于浮子纲的网目结节上;沉子纲上以6和7 g的铅坠相间隔的顺序装配在沉子纲与网衣连接的结节处;在网袖(沉子纲处)与下空纲连接处,左右各安装一个质量为75 g的沉子。
拖网模型主体网衣规格尺寸如表1所示,拖网网袖结构示意图如图1所示。网袖、力纲、浮子纲及侧纲等尺寸如表2所示。
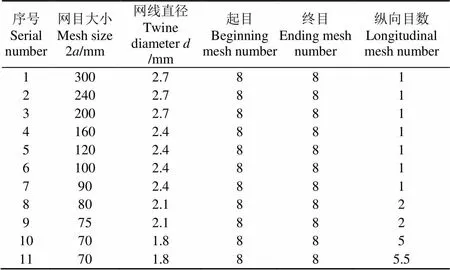
表1 拖网模型主体网衣规格尺寸
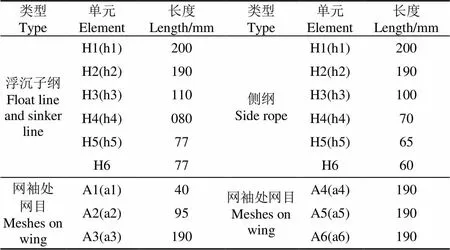
表2 拖网部分尺寸
1.2.2 拖网计算模型的初始形状
在对拖网进行数值计算之前,对拖网的初始形状进行一个设定,即假设拖网从网袖部分到网囊部分是一个近似圆锥的形状。图2表示的是拖网模型在三维坐标系中的初始设定形状,图2a-图2d分别为模型拖网的初始三维立体图、侧视图、前视图以及俯视图。每一个网目目脚看作一个有限单元,网身处共有目脚单元2 836个,每根空纲分成4段,4根空纲共16个线单元,总计2 852个单元。计算中,单元与单元的连接方式视为铰接,连接点为节点,网身处共有1 385个节点,加上空纲上的节点,整个拖网系统包含1 399个节点。
1.3 水槽模型试验设置
本次拖网模型水槽试验是在日本东京海洋大学大型水平循环水槽中进行。水槽的观测部长度为9.0 m,宽为2.2 m,水深为1.95 m,流速可控制在0~2.0 m/s 范围内。试验过程中,采用日本计测技术研究株式会社生产的螺旋桨式流速计(VO.101A,测量精度0.5%以内)对流速进行测量;针对不同流速水流作用下的拖网模型形状,利用设置在水槽侧面及底部观测窗的2台数码照相机同时进行拍摄记录。试验流速控制在0.4~0.9 m/s范围内,0.1 m/s为一个间隔进行测试。试验装置如图3所示。
2 结果与分析
2.1 拖网空纲拉力变化分析
图4表示拖网空纲拉力与流速之间的关系,且对比了计算值与试验值。拖网空纲拉力随着流速的增加呈幂函数形式增大,速度较大时比速度较小时符合情况更好,平均误差在10.5%,保持在一个较小的误差范围。
2.2 拖网网形变化分析
当流速稳定时,拖网系统整体处于一个平衡状态,图5表示拖网数值模拟在0.5~0.8 m/s流速下网形的变化情况。
左侧和右侧的试验照片分别由安装在侧面和底部的2台相机拍摄。随着流速增加,同侧连接拖网的上空纲与下空纲之间的夹角在逐渐减小,网口上下间距在不断减小,结合图6a可知拖网网身有轻微拉长,但并不明显。另外,由于浮子体积大于沉子,造成浮子纲所受水流阻力更大,当流速较小时,浮子纲在轴方向上较沉子纲靠后,但随流速的增加和网口的变化,浮子纲与沉子纲在轴方向上的间距差异逐渐减小。这一特性在计算中也有所体现,但不如试验中效果明显。
图6表示拖网网身长度、网口高度以及网口宽度在0.5~0.9 m/s流速下其试验值与计算值的变化情况。从网身长度变化角度来看,计算值比试验值略小,基本接近,平均误差3.4%;网口高度的计算值与试验值符合良好,平均误差4.2%;网口宽度计算值较明显大于试验值,但平均误差值小于9.3%,造成该误差大于前二者的原因如下:随着流速增加,模型网的左右两片网衣在水流作用下比上下两片网衣更为松弛,此部分向后方漂移更大,而计算时侧向力的计算使网衣横向扩展更加饱满,造成网口宽度计算值比试验值出现较大误差。
从图5以及图6b、图6c可以看到,随着流速不断增加,拖网网口高度呈现一个逐渐降低的趋势,而网口宽度则相反不断变大。原因是浮子的浮力和沉子的沉力是固定的,当流速较小时,浮力和沉力在轴方向上的力比重较大,使网口高度得到充分扩张,而随着流速增加,在轴方向上所受到的阻力增大,即浮子纲所受合力和沉子纲所受合力与轴方向的夹角均变小。当流速大于0.8 m/s时,由于拖网本身已处于较为拉紧的状态,网口高度及网口宽度的变化幅度则会越来越小。
2.3 拖网网身网线张力变化分析
图7分别描述拖网数值模拟在0.5~0.8 m/s流速下的前视图,图中不同颜色显示了网线张力变化。每张图片右端是一段比色棒,从蓝色往红色的颜色变化表示张力逐渐增大。由于模型拖网中网目张力以1 N以下居多,为更好地呈现各网目目脚张力之间的差异,对于张力≥1 N的网目目脚全部以比色棒最顶端的红色显示。
通过对拖网网身目脚张力变化进行对比分析,得到如下结果:
1)相对整体变化过程来讲,当流速增加时,拖网网身颜色趋于一个从冷色较多的状态逐渐变化到暖色较多的状态。换言之,拖网网线张力随着流速的增加呈现一个增大趋势,流速越大,多数的网线张力越大。对于某些张力小,且变化不明显的网线,可以考虑与网型设计有关。由此推论,在设计拖网时,某些部位的网线始终得不到张力拉伸,说明该部位的网衣设计不够合理,可以加以改进。
2)在流速较小时,上、下两片网片中网线张力与左、右两片网片中网线张力大小的差异较小,但当流速逐渐增大时,逐渐出现上、下两片网片中网线张力大于左、右两片网片中网线张力,且流速越大,差别越明显。原因是网口纵向变小,横向变宽,使得上下两片网片得到充分伸展。但是,紧靠浮沉子纲后部网线张力并非很大,而是其后的网身部分中越靠近力纲的网线张力越大。
3)拖网系统中浮子纲和4条力纲的颜色接近比色棒上端,说明随着流速增加,力纲上张力大小逐渐增大,当流速达到一定值时,力纲处于完全拉紧状态,当流速持续增大时,力纲张力虽会有增加,但对网形的影响程度已经逐渐减弱。而随着网口高度减小,宽度增加,浮沉子纲张力在增加的同时,侧纲张力的变化并不明显。
4)拖网系统中网囊部分的各网线基本接近蓝色,说明网囊处张力相对其他部分来说要小很多。因此,网囊网线张力受水流影响较小,其受力主要来源于渔获物的重力。
3 讨 论
1)网具阻力和纲索上受到的拖曳力通常是渔具研究中最为关注的问题之一。郁岳峰等[28]对探捕船搭载的四片式和六片式深水拖网开展过实际海域的试验研究,了解到网具阻力随拖曳速度增加呈现幂函数上升。熊沢泰生等[29]通过开展拖网模型试验来研究拖网渔具性能,得出拖网手纲张力随拖曳速度增大而增加,当流速较低时,张力缓慢增加,流速增高时,曳纲张力迅速变大。本次数值模拟结果与水槽模型试验结果均显示了拖网空纲拉力与流速呈幂函数关系。
2)陈雪忠等[30]提出四片式拖网网口扩张与L/L(侧网与背网或腹网横向拉直长度的之比值)相关,L/L值越大,网口垂直扩张以及扫海面积越小,并建议四片式拖网设计时L/L值应小于1。本文中的四片式拖网除在网口与网袖前端处其侧网尺寸比背(腹)网略小,其他部位基本一致。在流速增加的过程中,网口变化较明显,尤其在流速变大时,网口垂直扩张要明显小于网口水平扩张。同时,陈雪忠等[30]还提出拖网网袖长度与扫海面积及拖曳阻力呈正比例变化关系等;王明彦等[31]指出网身长度与网口周长大小的比值对拖网水动力性能有一定影响。在本次研究中,数值模拟和水槽模型试验并未从网袖长度、网身长度以及网口周长角度对拖网进行研究,因此无法比对上诉结论,但对今后的研究方向具有一定的指导作用。另外,网口张开与浮沉力大小也是密切相关的,网口扩张及网身形状伸展是流速、浮沉力以及网型本身设计的一个综合结果。
3)张爱忠等[32]指出采用单线结强力相同且直径较小网线可以有效降低网具的阻力面积(线面积),减少能耗,但考虑价格因素,中国拖网网衣材料仍以PE捻线为主,因此,如何根据拖网各部分受力情况进行合理配线就显得尤为重要。根据本次研究结果,拖网的浮沉子纲及力纲受力较大,力纲周围网目受力也较为明显。从数值模拟呈现3D图像可知,当背(腹)网或侧网在网袖至网身较靠前部分中存在张力一直较小且变化不明显的网线,则意味着该部分设计不够合理,需进行改善,如改变网型或变换局部网线粗度。与靠经验来配线相比,采用数值计算可以更准确地掌握网线张力分布情况,进而达到合理配线的目的。
在本研究中所采用的拖网模型中,该拖网网衣部分总共有网目目脚单元2 836个,处于同一受力范围的目脚单元数量比例随着流速的增加而增加,在0.5 m/s的流速下,张力大于2 N的目脚只有2个,如图8所示,张力小于0.2 N的目脚数量占总单元数比例为90%;在0.8 m/s的流速下,张力大于2 N的目脚有26个,占总单元数比例为0.92%,张力小于0.2 N的目脚数量占比70%。由此可见,通过数值计算,可以为合理进行拖网配线提供量化的依据,甚至可以根据需要对数据进行处理后拟合出包含张力、流速、网线比例等多因素的公式,而网线在拖网上的具体分配方法,可以参考图7,从而弥补了水槽试验难以测量网目张力的缺陷。不过,由于拖网类型的不同设计,张力分布也有所不同,所以在配线问题上不能形成一个统一的标准,必须具体类型具体分析。
4 结论与讨论
本研究应用有限单元法建立拖网系统在水流作用时的数值计算仿真模型,并相应地开展水槽模型试验,数值模拟结果与试验结果良好吻合,并就拖网形状和张力变化特性得到以下结论:
1)随着流速增加,拖网拖曳力呈幂函数形式增长,试验值与计算值误差在10%左右。拖网同侧上下空纲角度逐渐减小,网身长度有轻微拉伸,网口高度减小,网口宽度增加,试验与计算符合良好,网口宽度的平均误差稍大,但小于10%;
2)在水流作用下,浮子纲较沉子纲位置靠后,两者间距的差异随着流速增加而减小。流速对拖网网形变化的影响幅度在流速达到较高值后将随着流速的增加而减小;拖网网身中,浮沉子纲、力纲及其周边网目受力较大,网囊部分受力较小,随着流速增加,拖网网身大部分网目受力增加,上下网片比左右网片受力更大;网囊处张力一直较小,可见拖网作业过程中网囊受力主要来自于渔获物的重力;
3)本文的四片式拖网在0.5 m/s的流速下,张力小于0.2 N的目脚数量占总单元数比例为90%;在0.8 m/s的流速下,张力大于2 N的目脚占总单元数比例为0.92%,张力小于0.2 N的目脚数量占比70%。数值模拟计算可以为拖网配线提供量化依据,然而由于拖网类型多样,不同设计导致张力分布不同,故此需要具体类型具体分析。
数值模拟方法的目的是对复杂渔具及其在不同作业条件下渔具形状和各部分受力情况进行模拟分析,本次研究证实该模型的有效性。在今后的研究中,将通过改变拖网纲索、网身及网囊结构、配线参数、附加渔获物等情况进行研究,为接下来的拖网设计和改进提供参考。
[1] 孙满昌. 海洋渔业技术学[M]. 北京:中国农业出版社,2012:187.
[2] 黄锡昌. 海洋捕捞手册[M]. 北京:农业出版社,1990.
[3] 孙中之,周军,赵振良,等. 黄渤海区捕捞结构的研究[J]. 海洋科学,2012,36(6):44-53.
Sun Zhongzhi, Zhou Jun, Zhao Zhenliang, et al. The fishing structure of the Yellow Sea and Bohai Sea[J]. Marine Sciences, 2012, 36(6): 44-53. (in Chinese with English abstract)
[4] 杨吝. 渔具渔法对南海北部渔业资源和海洋环境的影响[J]. 现代渔业信息,1998,13(2):5-9.
Yang Lin. Impact of fishing gear and fishing method on fisheries resources in the North of South China Sea and marine environment[J]. Modern Fisheries Information, 1998, 13(2): 5-9. (in Chinese with English abstract)
[5] 农牧渔业部水产局,农牧渔业部东海区渔业指挥部. 东海区渔业资源调查和区划[M]. 上海:华东师范大学出版社,1987.
[6] 许传才. 北方沿海小型单船底拖网的研制和试验[J]. 大连水产学院学报,1997,12(3):27-34.
Xu Chuancai. The test and study on the small single trawling net[J]. Journal of Dalian Fisheries University, 1997, 12(3): 27-34. (in Chinese with English abstract)
[7] 李明智,张光发,李秀辰,等. 虾夷扇贝捕捞网具的改进及应用效果[J]. 农业工程学报,2013,29(11):52-60.
Li Mingzhi, Zhang Guangfa, Li Xiuchen, et al. Improvement and application effects of fishing gear foryessoensis[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(11): 52-60. (in Chinese with English abstract)
[8] 王志勇,汤涛林,徐志强,等. 渔船拖网绞车张力自动控制系统设计及试验[J]. 农业工程学报,2017,33(1):90-94.
Wang Zhiyong, Tang Taolin, Xu Zhiqiang, et al. Design and experiment of automatic tension control system trawl winch on fishing boat[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(1): 90-94. (in Chinese with English abstract)
[9] 孙泰昌,邹惠君. 我国近海拖网网身形状及其配线的研究[J]. 现代渔业信息,1997,12(4):8-11.
Sun Taichang, Zou Huijun. Study on body shape of trawl and its netting yarn configuration of offshore of China[J]. Modern Fisheries Information, 1997, 12(4):8-11. (in Chinese with English abstract)
[10] 石永闯,朱清澄,张衍栋,等. 基于模型试验的秋刀鱼舷提网钢索张力性能研究[J]. 中国水产科学,2016,23(3):704-712.
Shi Yongchuang, Zhu Qingcheng, Zhang Yandong, et al. Factors influencing the rope tension of saury stick-held lift nets[J]. Journal of Fishery Sciences of China, 2016, 23(3): 704-712. (in Chinese with English abstract)
[11] 许柳雄. 渔具设计与理论[M]. 北京:中国农业出版社,2004.
[12] Hu Fuxiang, Matuda K, Tokai T, et al. Dynamic analysis of mid-water trawl system by a two dimensional lumped mass method[J]. Fisheries Science, 1995, 61: 229-233.
[13] Lee C W, Zhang C, Shin H O. Simplified trawl system modeling and design of a depth control system using fuzzy logic[J]. Fisheries Research, 2001, 53: 83-94.
[14] Lee C W and Lee J .H. Modeling of a midwater trawl system with respect to the vertical movements[J]. Fisheries Science, 2000, 66: 851-857.
[15] Prat J, Antonijuan J, Folch A, et a1. A simplified model of the interaction of the trawl warps, the otter boards and netting drag[J]. Fisheries Research, 2008, 94(1): l09-117.
[16] Park H H. A method for estimating the gear shape of a mid-water trawl[J]. Ocean Engineering, 2007, 34: 470-478.
[17] Sun X F, Yin Y, Jin Y C, et al. The modeling of single-boat, mid-water trawl systems for fishing simulation[J]. Fisheries Research, 2011(10): 7-15.
[18] 孙霄峰,高帅,尹勇,等. 渔船模拟器中中层拖网的建模与仿真[J]. 大连海洋大学学报,2012,27(3):284-288.
Sun Xiaofeng, Gao Shuai, Yin Yong, et al. Modeling and simulation of midwater trawlin fishing vessel simulator[J]. Journal of Dalian Ocean University, 2012, 27(3): 284-288. (in Chinese with English abstract)
[19] Priour D. Numerical optimization of trawls design to improve their energy efficiency[J]. Fisheries Research, 2009, 98(1): 40-50.
[20] Priour D. Analysis of nets with hexagonal mesh using triangular elements[J]. Int. J. Numerical Methods in Engineering, 2003, 56(12): 1721-1733.
[21] Priour D. A finite element method for netting. Application to fish cages and fishing gear. Springer Briefs in Environmental Science. Springer, ISBN:978-94-007-6843-7.
[22] 陈英龙,赵勇刚,周华,等. 大型中层拖网网具系统的仿真研究[J]. 浙江大学学报:工学版,2014,48(4):625-632.
Chen Yinglong, Zhao Yonggang, Zhou Hua, et al. Simulation study of large mid-water trawl system[J]. Journal of Zhejiang University: Engineering Science,2014, 48(4): 625-632. (in Chinese with English abstract)
[23] Wan R, Huang W Q, Song X F, et al. Statics of a gillnet placed in a uniform current[J]. Ocean Engineering, 2004, 31: 1725-1740.
[24] Wan R, Hu F X, Tokai T. A static analysis of the tension and configuration of submerged plane netting[J]. Fisheries Science, 2002, 68(4): 815-823.
[25] Wan R, Hu F X, Tokai T. Computer simulation of shape and tension on fishing net and rope system[J]. Fisheries Science, 2002, 68: 1853-1856.
[26] 万荣,宋协法,唐衍力. 养殖网箱耐流特性的计算机数值模拟[C]//863海洋生物技术专题研讨会论文集,舟山,2003:361-365.
Wan Rong, Song Xiefa, Tang Yanli. Numerical simulation on the anti-current characteristics of fish cages[C]//863 Marine Biotechnology Symposium Papers, Zhoushan, 2003: 361-365. (in Chinese with English abstract)
[27] 宫崎芳夫. 东京水产大学研究报告[R]. 东京,1970:49-117.
Miyazaki Y. Research report of Tokyo University of Fisheries[R]. Tokyo, 1970: 49-117. (in Japanese with English abstract)
[28] 郁岳峰,张勋,冯春雷. 单船深水底拖网渔具渔法的试验研究[J]. 现代渔业信息,2008,23(9):9-12.
Yu Yuefeng, Zhang Xun, Feng Chunlei. Experiment and research onfishing method for bottom trawl net of otter board trawler[J]. Modern Fish Information, 2008, 23(9): 9-12. (in Chinese with English abstract)
[29] 熊沢泰生,胡夫祥,渡部俊広. カイト式表中層トロール網の開開[J]. 水産工学,2010,46(3):197-204.
Taisei K, Hu F X, Toshihiro W. Development of a pelagicand mid water trawl with canvas kites[J]. Fish Engineering, 2010, 46(3): 197-204. (in Japanese with English abstract)
[30] 陈雪忠,郁岳峰,刘峰,等. 四片式中层拖网主要部件尺寸变化对其性能的影响[J]. 水产学报,1997,21(1):49-56.
Chen Xuezhong, Yu Yuefeng, Liu Feng, et al. The effect of the change of size of the main parts of four-panel mid-water trawl on its characteristics[J]. Journal of Fisheries of China, 1997, 21(1): 49-56. (in Chinese with English abstract)
[31] 王明彦,陈雪忠,徐宝生. 双船底拖网渔具设计参数的研究[J]. 水产学报,1996,20(1):36-44.
Wang Mingyan, Chen Xuezhong, Xu Baosheng. Studies on design-parameters of two-boat bottom trawl net[J]. Journal of Fisheries of China, 1996, 20(1): 36-44. (in Chinese with English abstract)
[32] 周爱忠,张禹,郁岳峰,等. 聚乙烯编织线替代普陀聚乙烯捻线对拖网性能的影响[J]. 海洋渔业,2013,35(1):95-101.
Zhou Aizhong, Zhang Yu, Yu Yuefeng, et al. Experimental research on trawl performance of braided polyethylene netting twine replacing common polyethylene twisting[J]. Marine Fisheries, 2013, 35(1): 95-101. (in Chinese with English abstract)
Numerical simulation and flume experiment of shape and tension force characteristics of fishing trawl
Liu Lili1,2, Hu Fuxiang3, Wan Rong4,5, Zheng Ji1,2, Gao Min3, Zhu Yuanyuan3, Dong Shuchuang3
(1.,316004,; 2.,316004,; 3.,1080075,; 4.,201306,; 5.,201306,)
Trawls are funnel-shaped nets that are towed by vessels along different water column. According to different fishing requirement and species behaviors, numerous variations for trawls exist. The performance efficiency and fuel efficiency of trawl are largely influenced by designing, which has direct affinity with net mouth opening, net body shape, netting elongation and twine distribution. Comparing with flume tank tests, the numerical model is more convenient to carry out, and also can easily obtain the tension distribution of mesh bars which otherwise is difficult to measure in water tank experiment. In order to know the shape and tension variation characteristics of trawl, in this study, a nonlinear mixed method was used to determine the equilibrium configuration and tension distribution of a trawl set in a uniform current. The method was based on finite element formulation, and the mesh bars were modeled as straight mesh bar elements which were connected with other elements by a frictionless hinge. Meanwhile, an experimental trawl model for measuring hydrodynamic characteristics was also generated, which took a kind of Japan four-seam mid-water trawl as an example. The model of trawl was made of PA (Polyamide). Measuring speed of current was set between 0.4 to 0.9 m/s. In the experiment, the photos from side view and vertical view were synchronously taken in each current velocity. Besides, the width and height of net mouth, the length of trawl body, and the tension force of leg line were all measured. Then, the corresponding simulation model of the trawl was established and solved using MATLAB based on the mathematical model with the number of mesh bar elements of 2 852 and the number of the knots of 1 399. By comparing the calculation results with measured values from circulating water tank model test, it showed that both of the leg line tension and shape of trawl generally agreed well. The tension distributions of mesh bars of trawl were also presented.The results of shape and tension variation characteristics of trawl were concluded as follows: 1) The drag force of leg line increased by power with the increase of current velocity. Average error between calculation and experimental results was about 10%. As the velocity increased, the angle of same-side upper and lower legs gradually decreased, net body length prolonged, height of net mouth narrowed corresponding with the widening of net mouth. The numerical values of width of net mouth were a little higher than experiment results, but the average error of which was within 10%. 2) The position of float line was behind sinker line in x-axis because of the flow effect, but the distance from each other diminished if current velocity increased. The effect of current velocity to shape change of trawl weakened if current velocity had been comparatively large. 3) The tension of float line, sinker line, lace rope and its surrounding mesh bars were comparatively high, while the force of cod end were small. As increase of the current velocity, the tension of most meshes of net body was increased. Moreover, the tension of up and bottom panels of trawl were larger than left and right panels. 4) Tensions of cod-end were much smaller than other parts. The force on cod-end would be mainly from the weight of catch. 5) Numerical calculation can provide quantitative theory for reasonable twine distribution of trawl. However, owing to the difference of tension distribution caused by different design of each types of trawl, it was difficult to obtain a unified standard among all of the trawls for the twine distribution problem. The mathematical method in this study can be used to effectively simulate the operating status of trawls, which included shape and tension force characteristics. Our results can provide reference for design and improvement of trawl.
experiments; computer simulation; models; trawl; shape; tension
10.11975/j.issn.1002-6819.2017.09.009
S972.13
A
1002-6819(2017)-09-0069-07
2016-11-08
2017-04-08
国家自然科学基金青年基金(41606110);浙江省自然科学青年基金(LQ14C190002);浙江省自然科学基金(LY14C190005);浙江海洋大学科研启动费
刘莉莉,女,博士,研究方向为渔业工程与技术。舟山 浙江海洋大学水产学院,316004。Email:liulili2001@163.com
刘莉莉,胡夫祥,万 荣,郑 基,高 敏,朱媛媛,董舒闯. 拖网形状与张力特性的数值模拟计算与水槽试验[J]. 农业工程学报,2017,33(9):69-75. doi:10.11975/j.issn.1002-6819.2017.09.009 http://www.tcsae.org
Liu Lili, Hu Fuxiang, Wan Rong, Zheng Ji, Gao Min, Zhu Yuanyuan, Dong Shuchuang. Numerical simulation and flume experiment of shape and tension force characteristics of fishing trawl[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(9): 69-75. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.09.009 http://www.tcsae.org
猜你喜欢
毛纺科技(2022年8期)2022-08-26
中国新闻周刊(2021年36期)2021-09-30
数字通信世界(2021年1期)2021-02-03
铁道通信信号(2020年2期)2020-09-21
河北渔业(2020年8期)2020-08-18
铁道通信信号(2019年8期)2019-10-10
农村经济与科技(2019年5期)2019-09-01
铁道通信信号(2019年11期)2019-05-21
科学与技术(2019年21期)2019-04-27
河北渔业(2018年4期)2018-05-08
