长及柱状商品缠绕式包装机构的设计
2017-06-27 08:12:19王亦凡钟桥杨旭
中国设备工程 2017年12期
王亦凡,钟桥,杨旭
(武汉理工大学机电工程学院,湖北 武汉 430070)
长及柱状商品缠绕式包装机构的设计
王亦凡,钟桥,杨旭
(武汉理工大学机电工程学院,湖北 武汉 430070)
现有长、柱状商品存在包装过程繁琐,包装效率不高的特点。针对此问题,本文设计了一款人工动力的半自动化缠绕式包装机,脚步踩踏提供动力,通过四杆机构传递脚部动力,手轮转动实现商品的夹紧固定,由齿轮系配合同步带提供双向缠绕动力,上、下齿轮驱动不完全齿轮机构提供不等速运动,实现商品包装材料的缠绕和切断,三星轮换向机构能转换缠绕方式实现对商品的快速完整缠绕包装,有效地提高包装效率,保护产品安全。
包装;缠绕;半自动
现阶段随着互联网的发展,各类商品层出不穷。随着商品种类多样化,也遇到了相当多的问题,对于各类商品的包装就是一个方面。相对于传统的方形商品,长条形、圆柱状的商品更是一个比较难以包装的商品类型。比如小型的植物、花卉、雨伞等各类细长的生活用品,都需要完整的包装。
现有的对长、柱状商品的包装多以人工手动套袋或者缠绕保护材料为主,以小型植物、苗木为例,现有的包装方式多为人工绕膜,而现行的打包步骤多、过程繁琐,耗费了大量的人力物力,并且包装效果对于商品的保护并不理想。
1 缠绕式包装机的机械结构设计
本项目中半自动缠绕式包装机主要使用脚步踩踏提供动力,通过四杆机构传递脚部动力,由齿轮系配合同步带提供双向缠绕动力,手轮转动实现商品的夹紧固定,推杆改变行星轮与齿轮片的啮合方向实现反向包装。
本人工动力的半自动缠绕式包装机分为夹紧模块、动力模块、不等速缠绕包装模块。其中夹紧模块由手轮、蜗轮蜗杆、齿轮齿条、梯形齿同步带等机构之间的相互配合实现对商品的双向定位加紧;动力模块是以人力踩动踏板为动力源,利用四杆机构传递动力,结合锥齿轮为齿轮轴提供转动动力,并通过梯形齿同步带为对称部位的齿轮轴提供等速的转动动力,为上层齿轮系的转动提供双向动力源,保证齿轮系的顺利转动;不等速缠绕包装模块采用齿数分别为5模24齿与5模20齿的齿轮带动不完全齿轮机构,达到上、下不完全外齿轮环传动比差为1的不等速运动,从而使绕膜柱与切膜柱之间存在运动的速度差和距离差,配合三星轮换向机构啮合外部不完全齿轮实现对商品的双向缠绕包装;在包装完成后绕膜柱与切膜柱达到统一位置实现对膜的切断,整体结构如图1。

图1 整体结构图
1.1 夹紧机构的设计
夹紧模块的功能即为固定商品的中心位置以便缠绕包装。手轮连接齿轮,以手的摇动为动力,带动蜗轮转动,通过蜗轮蜗杆机构将手轮的竖直方向旋转改变为蜗轮水平方向的旋转,带动竖直轴转动将动力传递给齿轮齿条机构,通过齿轮齿条机构将齿轮的旋转运动转化为齿条直线运动,夹紧柄的一段连接在齿条上随着齿条向中心运动;齿轮转动时通过梯形齿同步带将运动传递给对称的齿轮齿条机构,此时,两端的夹紧柄同时向中心运动,保证了装置的夹紧功能和商品包装的中心位置。
1.2 动力机构的设计
动力机构用以提供整个装置缠绕包装的动力。参考缝纫机的踏板供能原理,以人反复踩动踏板提供动力,采用四杆机构原理,踏板带动连杆使偏心轮转动,偏心轮为上部装置提供动力,同时踏板的下部有一复位弹簧,方便人脚的连续踩动,提供持续动力。
1.3 不等速缠绕包装机构的设计
1.3.1 不完全齿轮机构(图2)
不完全齿轮机构如图所示包括上传动齿轮1、2,下传动齿轮3、4,上不完全外齿轮5、下不完全外齿轮6、固膜柱7、绕膜柱8、切膜柱9。
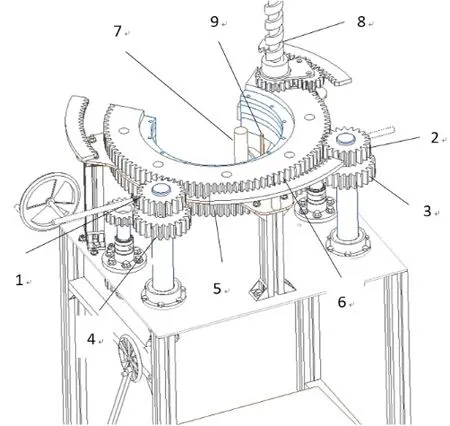
图2 不完全齿轮机构图
不完全齿轮机构对应相应的传动机构能实现两个相同的齿轮做同向旋转运动,并与中空的不完全齿轮啮合,带动不完全齿轮转动,借此保证每一商品在水平方向上的单向直线运动。通过带传动转动的对称齿轮轴以相同转速带动不同齿数的上、下齿轮转动,使相同齿数的上、下不完全外齿轮转动,实现上、下不完全外齿轮的传动比差为1不等速运动。包装膜固定在绕膜柱上,一段固定在固膜柱上,其中固膜柱固定不动,绕膜柱与上不完全外齿轮相连接,切膜柱与下不完全外齿轮相连接。固膜柱与绕膜柱一同完成保鲜膜的预紧与缠绕功能,绕膜柱与切膜柱上、下齿轮的传动比差为1产生运动的速度差和距离差,当输入轴初始速度一定时,经过若干圈后,内部切膜柱比上部供膜柱多转一圈,最后实现对膜的切割。
1.3.2 三星轮换向机构(图3)
三星轮换向机构包括齿轮1、齿轮2、齿轮3、上行不完全内齿轮4和下行不完全内齿轮5。

图 3 三星轮换向机构下行图
上不完全外齿轮带动三星轮换向轮系整体运动,当齿轮1与上行不完全内齿轮啮合时,此时缠绕膜固定在托盘上随着丝杠的转动向上运行;当齿轮2与上行不完全内齿轮啮合时,此时包装膜固定在托盘上随着丝杠的转动向下运行,从上往下对商品的下部进行缠绕包装,实现对商品的双向包装。
2 部分机构尺寸设计
四杆机构的设计如下。
我们采用偏置曲柄滑块机构,为本包装机提供动力。根据已选工件的尺寸及定位要求,设底板中心为坐标原点,传动轴离中心的距离为225mm,以成人脚踩行程为15cm为标准,进行设计,以传动杆为机架点,根据实际生活中人踩动脚踏板的工作情况,取另一机架点的离地高度约为180~230mm。考虑到本装置应传动平稳,行程系数比K不应过大。结合对踏板的力矩平衡分析,当摇杆长度约为踏板长度一半时,相对符合人的工作习惯。故摇杆长度为300mm,行程系数比K约等于1,对杆长进行计算,根据计算得到曲柄长度为66mmm,连杆为473,极位夹角为1.23deg,最大传动角r为65度。
3 结语
在互联网急速发展的今天,网络经营商中的非常规尺寸商品的产量巨大并现有的人工手动包装方式效率不高,过程繁琐,耗费了大量的人力物力,需要快速有效的包装方式。本装置人工动力的半自动缠绕式包装机,贴合当前包装行业的发展,针对长、柱状特殊商品包装存在的各种问题结合现有的塑料膜缠绕,纸盒保护等包装技术,设计了适合于特殊商品的包装装置,实现对商品的快速缠绕包装。
通过半机械化、标准化的方式提高商品包装、封箱、出货效率,便于在最快的时间内完成货物的订单发货流程处理,符合当今商家要求的快速、便捷特点,有效解决了部分商家包装作业量大、人手少的问题。
[1]张海涛. 半自动吸塑包装机的设计及应用[D].华南理工大学,2015.
[2]唐金松主编.简明机械设计手册[M].上海:上海科学技术出版社,1992.
[3]刘鸿文.材料力学I(第4版)[M].北京:高等教育出版社,2004,1.
[4]黄鹤汀.机械制造装备(第1版)[M].北京:机械工业出版社,2004.
[5]朱建萍,王鹏主编.包装机械设计方法研究[M].南京:南京财经大学出版,2007.
[6] 贺兵,刘扬主编. 模块化设计在包装机械设计中的应用[M].湖南:湖南工业大学,1992.
[7]王东爱,王岭松主编.包装机械的模块化设计研究. 包装工程,2008.
[8]曲艺主编.面向包装机械的可适应性设计方法研究.汕头大学,2004,1.
[9]刘守谦主编.现代包装机械的创新设计. 轻工机械,2007.
[10]郝玉龙,徐泰燕主编.现代包装机械设计方法[J].湖北水利水电职业技术学院学报,2011.
TB486
A
1671-0711(2017)06(下)-0169-02
猜你喜欢
车主之友(2022年6期)2023-01-30 07:58:16
装备制造技术(2021年1期)2021-05-21 07:54:50
水运工程(2020年2期)2020-02-26 06:28:38
黄河之声(2019年23期)2019-12-17 19:08:43
汽车实用技术(2019年17期)2019-09-21 03:46:32
物流技术与应用(2019年6期)2019-07-16 08:14:52
黄河之声(2017年13期)2017-01-28 13:30:17
电子制作(2016年23期)2016-05-17 03:53:44
水利科技与经济(2016年7期)2016-04-25 13:03:04
重型机械(2016年1期)2016-03-01 03:42:07