
大气偏振模式特征及其在自主导航中的应用*
2017-06-27 08:14范之国徐超吴川高隽
现代防御技术 2017年3期
范之国,徐超,吴川,高隽
(合肥工业大学 计算机与信息学院,安徽 合肥 230009 )
大气偏振模式特征及其在自主导航中的应用*
范之国,徐超,吴川,高隽
(合肥工业大学 计算机与信息学院,安徽 合肥 230009 )
针对复杂变化的大气环境,如何实现大气偏振模式的建模与时空变化规律的精确表征,是大气偏振模式相关研究的难点和热点。针对大气偏振模式在偏振光自主导航领域中的应用,通过分析大气偏振模式宏观变化规律,甄选可以作为导航参照的显著特征,详细介绍了大气偏振模式“∞”字形特征的建模方法,阐明了“∞”字形特征为偏振光导航提供航向信息的可行性,为偏振光导航信息的获取提供了一种切实可行的方法。
偏振光导航;大气偏振模式;自主导航;特征建模;规律表征;航向信息
0 引言
太阳光是一种振动方向与传播方向相垂直的横电磁波,作为一种自然光源,在进入大气层之前是无偏振的;进入大气层之后,由于受到大气分子、气溶胶粒子的散射、辐射和吸收,以及地表的反射,会改变其偏振特性,形成拥有不同偏振态的偏振光,大量的偏振光形成了特定的偏振态分布,称之为大气偏振模式[1]。大气偏振模式可由偏振强度场和偏振方向场等信息进行表征,偏振强度场与光的偏振度分布相关,偏振方向场与光的E-矢量分布有关,大气偏振模式在时间、地点和环境等因素的共同作用下,呈现出一系列时空连续分布特性。大气偏振模式是太阳光在经过大气层的过程中,由各种内部与外部因素共同作用下的产物,体现了系统内部各要素的运动规律和外部环境的扰动关系。因此,大气偏振模式中蕴含着空间方位、大气层结构参数以及地表特性等重要的信息,有效地检测、记录及应用这些信息,不仅在偏振光导航研究中具有重要的价值,在大气环境监测与预报、对地光学遥感、偏振成像与目标探测等领域都具有重要的意义。
1808年,法国物理学家Malus首次发现了光的偏振,1809年法国物理学家Arago首次发现了天空中光的偏振现象;之后法国气象学家Babinet,Brewster和Coulson等对天空偏振现象进行了早期的观测。1871年,英国物理学家Rayleigh创立了Rayleigh散射理论,验证了太阳光在传播过程中受大气分子等的散射作用,会改变偏振特性。1908年,德国物理学家Mie在Rayleigh散射理论的基础上,提出了Mie散射理论,实现了对全尺度球形粒子散射偏振特性的定量分析。Rayleigh散射理论和Mie散射理论能够合理地解释理想状态下大气分子形成的散射光的偏振特性,这些散射理论奠定了大气偏振模式研究的理论基础[2-3]。
实际情况中,大气中还存在气溶胶粒子、尘埃、烟粒,以及由水和冰组成的云雾等散射介质,会对大气偏振特性的分布状态产生显著的影响。因此,实际情况中的大气偏振模式更为复杂。针对复杂变化的大气环境,如何实现大气偏振模式的建模与时空变化规律的精确表征,是大气偏振模式相关研究的难点和热点。本文针对大气偏振模式在仿生偏振光导航领域中的应用,探讨大气偏振模式的时空变化规律,及其罗盘特征的解析与建模方法。
1 仿生偏振光自主导航方法
偏振光导航是一种既古老又新型的导航方法,考古学研究中发现,古代Viking人就掌握了利用太阳石等晶体感知大气偏振模式,实现了远洋航海[4]。但是,随着卫星导航、惯性导航等现代导航技术的兴起和应用,现代导航技术已经在人类的社会活动和军事活动中占据了主导地位,并发挥了至关重要的作用。近年来,随着对特殊情况下导航任务需求的不断提高,以及仿生科学的发展,越来越多的自主导航方法被人们所关注,仿生偏振光导航方法就是其中的典型代表。仿生偏振光导航研究兴起于生物学家对沙蚁(cataglyphis)等昆虫利用天空偏振光进行导航现象的发现和研究[1]。生活在北非沙漠中的沙蚁,在缺乏嗅觉和足够视觉信息的沙漠中漫游数百米觅食后,能够沿着几乎接近直线的路线返回巢穴[3-4]。研究表明:体重仅10 mg,大脑只有0.1 mg的沙蚁是利用其复眼中特殊的偏振神经感光结构,以极快的速度完成对存在复杂变化的大气偏振模式信息的检测和处理,提取出准确可靠的罗盘信息,实现导航与定位[5]。这种特殊的导航现象和惊人的导航能力,很早就引起了生物学家的关注[6-7]。
仿生偏振光导航方法是一种基于自然偏振特性的、被动的自主导航方法,是以沙蚁等生物高度敏感的偏振视觉感知与导航功能为生物基础,以太阳光的自然偏振特性为理论依据,通过对大气偏振模式的检测和演算,实现对载体姿态信息的判断[8]。其主要理论和关键技术包括:①大气偏振模式,是太阳光在大气传输过程中由于大气的散射作用而产生的偏振光所形成的特定的偏振态分布,是偏振光导航的参考源,为其提供坐标基准;②生物机理,是通过对沙蚁等生物偏振视觉系统的结构、功能和机理的研究,揭示生物偏振视觉神经系统的信息处理机制,为偏振光导航提供仿生模型;③偏振光导航传感器,通过对大气偏振模式信息的获取和演算,实现罗盘信息的输出,是偏振光导航的实现手段[1]。如图1所示。
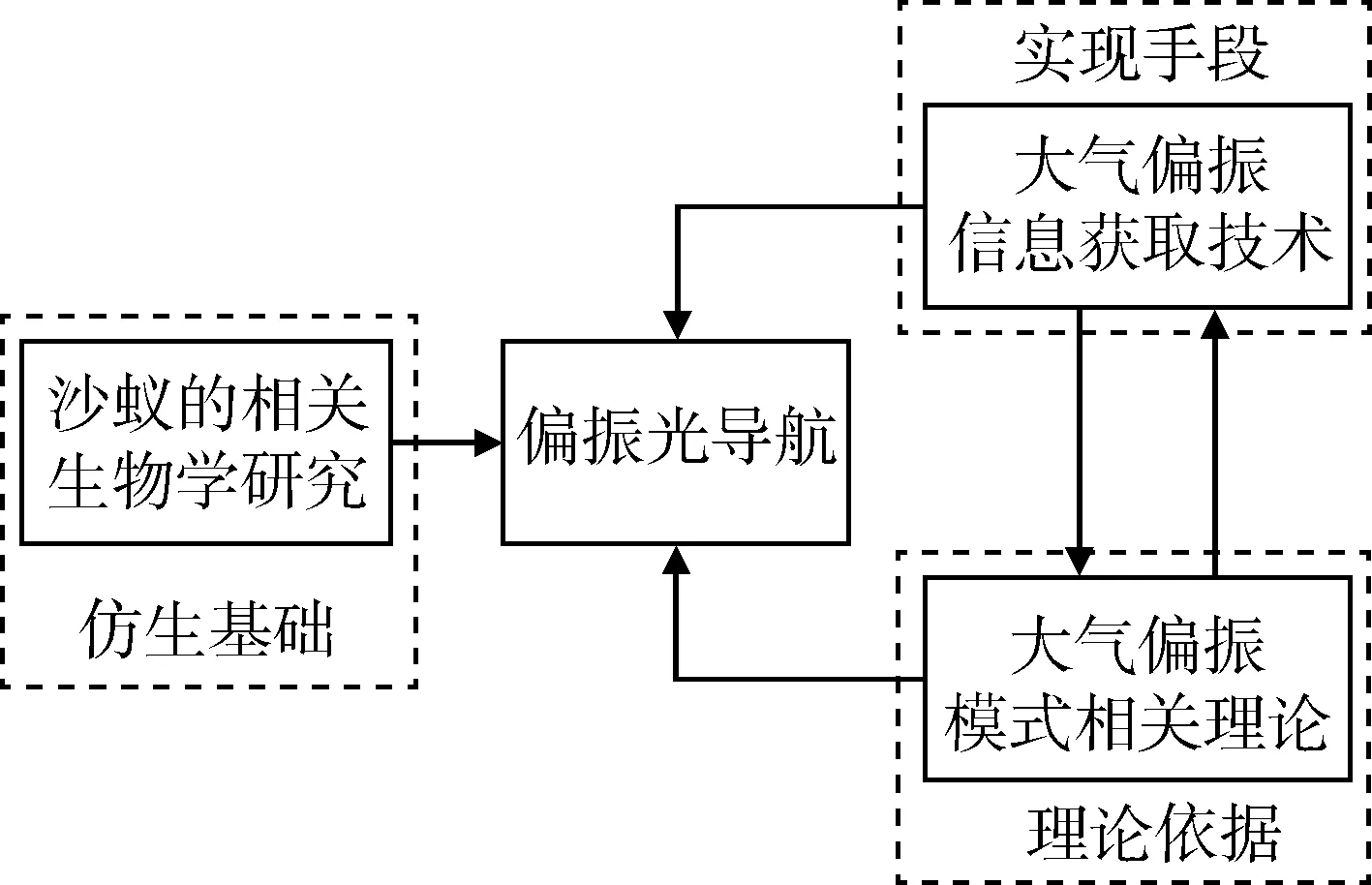
图1 仿生偏振光导航方法的研究内涵Fig.1 Research on the method of bionic polarized light navigation
仿生偏振光导航领域中对大气偏振的研究主要是为了获得大气偏振模式的宏观变化规律,并确立导航基准源。因此,需要建立完备的大气偏振模式解析模型。为了研究和应用大气偏振模式,人们提出多种大气偏振模式表征方法。其中,瑞利散射模型是描述大气偏振模式的经典模型,由此模型结合不同实际应用需求衍生了多种不同的改进表征[9-10]。Plass和Kattawar将Monte Carlo方法应用于偏振传输过程的仿真,建立一种同实际光传输过程最为相似的仿真表征[11]。Berry等人从分析天空偏振模式中存在的特殊偏振奇点的特性出发,获得一种更为逼近实际模式分布的仿真模式[12]。Hannay将单粒子瑞利传输过程推广至多次散射序列中,建立了一种基于偏振振动矢量的表征模型[13]。然而,目前的模型表征主要是基于不同的粒子散射原理进行分析,对大气偏振模式特征信息的描述较少[14]。实际情况下大气偏振模式在时间、空间和环境等因素的共同作用下,呈现出一系列时空连续分布规律,沙蚁等生物正是利用大气偏振模式的某些特征辨别方向。因此,掌握大气偏振模式的宏观变化规律,甄选并建立可以作为导航参照的显著特征,是实现基于大气偏振模式的导航信息获取的必要前提。
2 大气偏振模式的特征模型
在晴朗无云的条件下,大气对太阳光的散射主要是瑞利散射,单粒子散射的瑞利模型可以很好地描述理想情况下的大气偏振模式分布规律,该模型将天空假设为天球,如图2所示,天球中,设天球半径为1,天顶点为z,以观测者为原点O,以向天顶方向为z轴方向,以正东方向为x轴方向,以正北方向为y轴方向,建立坐标系Oxyz。T(x,y,z)为天球上的任意一点,其天顶角为θ,高度角为90°-θ,方位角为φ,其中,φ以平行正东方向为0,由正东向北旋转为正,向南旋转为负,T′(x,y)为该点在地平上的投影。太阳位置为S(xs,ys,zs),其天顶角为θs,高度角为90°-θs,方位角为φs,S′(xs,ys)为其在地平面上的投影,太阳方位可通过气象经验公式结合观测时间计算获得[15]。
当太阳位置为S(xs,ys,zs),由瑞利散射原理可以获得天空中的任意一点T(x,y,z)上散射光偏振角α[16]:
(1)
偏振角分布形态是太阳光进入天球,在各点上发生散射后,得到相同偏振角的散射点连线,即等偏振角线的形态。为分析偏振角的形态分布,假设偏振角为常数α,则tanα亦为常数,令k=tanα,代入式(1)后可得
(2)
式(2)两边同时乘以sinθ后,可得等偏振角分布的三维表征方程:
(3)
为了便于对偏振模式进行解析,把式(3)三维分布模式对地平垂直投影后,可获得偏振模式的水平分布特性。由k=tanα,可得到大气偏振模式对地平的水平投影模式,即
(4)
因此,式(3)即为理想条件下大气偏振模式等偏振角分布特征的三维表征模型。式(4)为其二维投影表征模型。大气偏振模式的等偏振角分布特征是由同太阳位置相关的一组类似于“∞”字形的线族构成,因此,称为大气偏振模式“∞”字形特征,该模型简称为“∞”字形模型。
3 实验结果与分析
3.1 仿真实验与分析
瑞利模型是一种最经典的大气偏振模式表征模型,因此,将“∞”字形分布表征方法同其进行对比,从而验证“∞”字形分布表征方法的正确性。由于抽取出了偏振角的形态分布特征,大气偏振模式“∞”字形分布特征能够反映天空中偏振分布的变化特性,实现直接对偏振角形态分布特征的解析描述,便于对大气偏振模式的特征特性进行研究分析。因此,通过对大气偏振模式“∞”字形分布的解析研究,可以完成对偏振模式中的对称性、天顶特征区域以及形态变化的特征特性的分析。
图3为瑞利模型表征的偏振化方向角同“∞”字形分布表征的对比,分别获取当太阳方位角为0°时,太阳高度角为0°,30°,60°时的瑞利模型的偏振角分布和“∞”字形分布。图3a)所示为瑞利模型的偏振角在(-90°,90°)范围内的变化情况。图3b)所示为“∞”字形分布,分别用不同颜色的曲线绘制-90°~90°范围内每隔15°的偏振角在天域中的分布,其中虚线为偏振角为负的分布线,黑点为太阳位置。
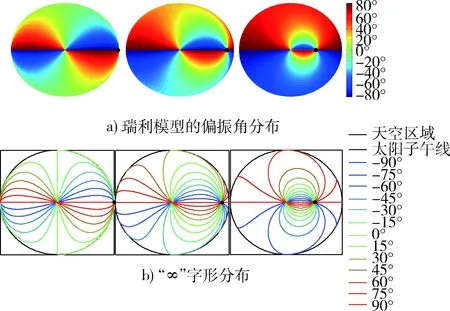
图3 偏振角“∞”字形表征的偏振模式同传统表示对比Fig.3 Comparison between the (angle of polarization) AoP’s “∞” shape representation and the traditional representation
由图3可以看出,在同一太阳高度角下,瑞利模型同“∞”字形模型具有相同的形态分布特征,随着太阳高度角的不同,两者的变化趋势亦保持一致。对比Gabor等获得的观测结果[17-18]可以发现,“∞”字形模型同实际观测的偏振形态同样具有一致性。
对大气偏振模式的分布随太阳子午线变化的特性进行仿真分析,如图4所示,以合肥(东经117°17′44″,北纬31°50′48″)为观测点,实验日期为2012-09-03,仿真当日一天内“∞”字形分布随太阳时的变化情况。
由图4可以看出,当观测位置不变时,随着一天内真太阳时的变化,太阳高度角和方位角逐渐变化,太阳子午线的方位发生旋转,而偏振角的分布模式亦随太阳子午线的改变而旋转变化,并始终以太阳子午线为中心轴。同时可以发现,随着太阳位置改变,偏振角的分布形态在随太阳子午线旋转的同时,形态特性亦逐渐发生改变,但整体能够保持“∞”字形的基本形态。

图4 大气偏振模式形态随时间变化Fig.4 Variation characteristic of atmospheric polarization pattern’s shape
天顶点位于观测者位置的正上方,天顶位置在天域中具有一定的特殊性,其偏振角的角分布曲率中包含了太阳位置信息。由图4可以看出,偏振角分布形态在天顶点汇聚后向地平方向以“∞”字形的特征向外发散,通过对天顶区域的“∞”字形曲率分析可以获得大气偏振模式的整体变化特性。
通过对“∞”字形的形态特征变化进行解析分析,可以获得全天域偏振模式的分布特性,如图4所示,当偏振角绝对值越大,其“∞”字形的分布逐渐向中心轴太阳子午线收缩,偏振角绝对值接近90°时,“∞”字形分布逐渐向太阳子午线位置退化,从而使大气偏振模式的偏振角分布在天空中构成层状的“∞”字形分布形态。随着太阳位置的升高,偏振角分布的曲率将逐渐增大,即随着太阳位置的上升其分布形态将逐渐向太阳方向蜷收,反太阳一侧的“∞”字形叶瓣会逐渐发生退化。当太阳高度升高到一定程度时,这一形态将发生翻转,由“∞”字形叶瓣平行于太阳子午线方向旋转为“∞”字形叶瓣垂直于太阳子午方向,当叶瓣收缩至一定程度时,偏振角分布形态将同地平恰好相切或不再相交。
3.2 实测实验与分析
在天气晴朗的情况下,利用瑞利模型进行导航误差较小,但是实际大气环境复杂多变,地表植被等对大气偏振模式也会产生反射影响,故而利用瑞利模型获取导航角的误差会较大。因此,在复杂的大气环境下,利用大气偏振模式的“∞”字形特征,进行导航更具有现实意义。
如图5所示,为实测晴朗天气下的大气偏振模式分布,选取茶卡盐湖信号发射塔旁(东经99°4′,北纬36°45′)作为实验地点,实验日期为2015-08-27,天气晴朗,只有部分云层分布,从时间下午19:00~19:15,每5 min获取偏振化方向角。其中图5a)为根据实测的大气偏振模式分布计算得到的偏振化方向角分布,图5b)为根据实测的大气偏振模式分布重构出的“∞”字形分布。

图5 实测晴朗天气下的大气偏振模式分布Fig.5 Atmospheric polarization pattern distribution in measured clear weather
可以看出,偏振角分布相对于太阳子午线具有反对称特性,其中的一条等偏振线构成了天空偏振角分布的“∞”字形分布的一边,而绝对值相等的偏振角大于0°或偏振角小于0°的等偏振线则构成了“∞”字形分布的另一边。大气偏振模式的“∞”字形特征在晴朗天气条件下是明显且稳定存在。
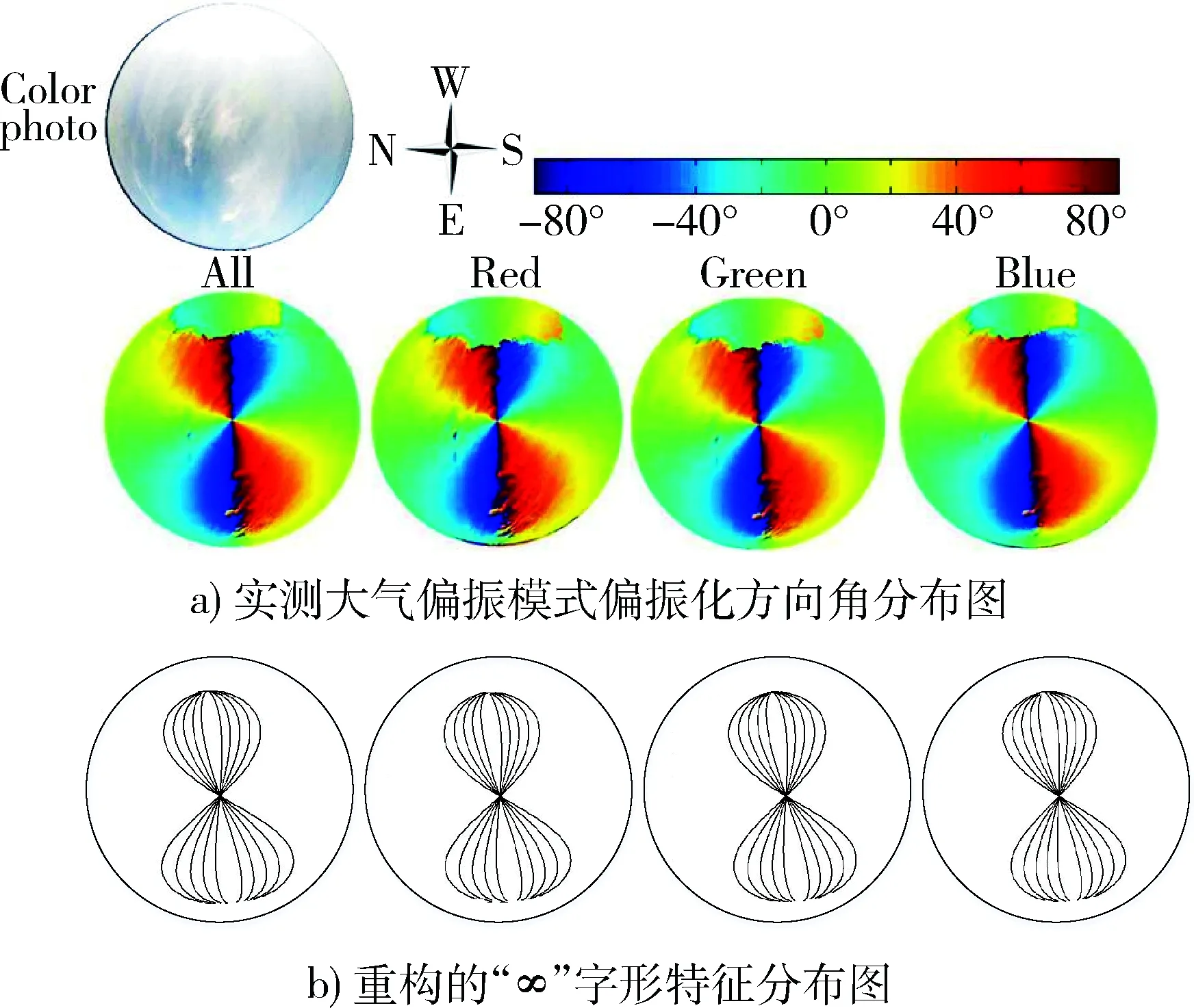
图6 多云下的全天域大气偏振模式分布图Fig.6 Distribution of the atmospheric polarization pattern under the cloudy weather
如图6所示,为实测的多云天气下的大气偏振模式分布图,选取刚察(东经100°09′,北纬37°18′)作为实验地点,实验日期为2015-08-28,天空中大部分有云层分布,从时间下午19:00~19:15,每5 min获取偏振化方向角。
由偏振化方向角的分布图可以看出“∞”字形区域被破坏,出现不连续的区域。但是,从整体上依然可以看出其分布呈现“∞”字形形态分布,并且仍以天顶为中心,以太阳子午线为反对称分布,和晴朗天气下的偏振化方向角分布相似,这说明了大气偏振模式的偏振化方向分布是较稳定的。
如图7所示为遮挡情况下的全天域大气偏振模式分布,日照人民广场(东经119°31′,北纬35°24′)作为实验地点开展的遮挡情况下的实测实验,实验日期为2014-08-17,天气晴朗,从下午16:35~17:05,每隔10 min采集天空区域的偏振模式,计算得到大气偏振模式的偏振化方向角分布。在观测时刻太阳刚好被树木遮挡,遮挡区域的偏振信息已不存在明显的规律性分布特征,而未遮挡区域仍呈现明显的“∞”字形形态。

图7 遮挡情况下的全天域大气偏振模式分布Fig.7 Distribution of orienture atmospheric polarization pattern under occlusion case
4 结束语
大气偏振模式在时间、地点和环境等因素的共同作用下,呈现出一系列时空连续分布特性。如何实现大气偏振模式的建模与时空变化规律的精确表征,大气偏振模式相关研究的难点和热点。本文针对大气偏振模式在偏振光自主导航领域中的应用,通过分析大气偏振模式宏观变化规律,甄选出以大气偏振模式的“∞”字形特征作为导航参照的显著特征,对大气偏振模式的“∞”字形的形态分布进行解析,阐明了该特征分布可以用于导航信息的获取,是偏振光导航过程中导航信息获取的一种新方法。理论研究和实验结果证明,该“∞”字形特征分布可以为偏振光导航提供稳定、可靠的信息源。
[1] 高隽,范之国.仿生偏振光导航方法[M].北京:科学出版社,2014. GAO Jun,FAN Zhi-guo.Bionic Polarized-light Navigation[M].Beijing:Science Press,2014.
[2] COULSON K L.Polarization and Intensity of Light in the Atmosphere[M].Hampton:A Deepak Pub,1988.
[5] GAO Jun,WANG Lei,BO Mei,et al.Information Acquisition in Desert Ant Navigation [J].International Journal of Information Acquisition,2006,3(1):33-43.
[6] FENT K,WEHNER R.Oceili:A Celestial Compass in the Desert Ant Cataglyphis[J].Science,1985(228):192-194.
[7] ROSSEL S,WEHNER R.How Bees Analyse the Polarization Patterns in the Sky [J].Journal of Comparative Physiology A,1984,154(5):607-615.
[8] 范之国,陈曼丽,王波,等.基于大气偏振模式的三维姿态信息获取[J].光学精密工程,2016,24(6):1248-1256. FAN Zhi-guo,CHEN Man-li,WANG Bo,et al.Three-Dimensional Attitude Information Obtained by the Skylight Polarization Pattern[J].Optics and Precision Engineering,2016,24(6):1248-1256.
[9] 王玲妹,高隽,谢昭.光的地表反射偏振特性分析及空间偏振模式计算方法[J].中国科学:物理学 力学 天文学,2013,43(7):833-843. WANG Ling-mei,GAO Jun,XIE Zhao.Analysis on Polarized Lights by Ground-Reflection with Calculating Its Spatial Patterns[J].Science China Physica,Mechanica & Astronomica,2013,43(7):833-843.
[10] WATERMAN T H.Polarization of Scattered Sunlight in Deep Water[J].Deep Sea Res,1955,3(1):426-434.
[11] PLASS G N,KATTAWAR G W.Monte Carlo Calculations of Light Scattering from Clouds[J].Applied Optics,1968,7(3):415-419.
[12] BERRY M V,DENNIS M R,LEE R L.Polarization Singularities in the Clear Sky[J].New Journal of Physics,2004,6(1):1-14.
[13] HANNAY J H.Polarization of Sky Light from a Canopy Atmosphere[J].New Journal of Physics,2004,6(1):197.
[14] MIN Qi-long,DUAN Min-zheng.A Successive Order of Scattering Model for Solving Vector Radiative Transfer in the Atmosphere[J].Journal of Quantitative Spectroscopy and Radiative Transfer,2004,87(3):243-259.
[15] 王家骥.太阳在银河系中所处的环境[J].自然杂志,2006,28(1):18-21. WANG Jia-ji.The Environment of the Sun in the Galaxy[J].Chinese Journal of Nature,2006,28(1):18-21.
[16] 田柳,高隽,范之国,等.基于大气偏振模式分布规律的导航方向角计算方法[J].电子学报,2012,40(1):141-146. TIAN Liu,GAO Jun,FAN Zhi-guo,et al.The Method of the Navigation Direction Angle Calculation with the Distribution of the Atmospheric Polarization Pattern[J].Acta Electronica Sinica,2012,40(1):141-146.
[17] RAMON H,SUSANNE A,WEHNER R,et al.Could Vikings have Navigated under Foggy and Cloudy Conditions by Skylight Polarization? On the Atmospheric Optical Prerequisites of Polarimetric Viking Navigation under Foggy and Cloudy Skies[J].Proceedings of the Royal Society A,2007(463):1081-1095.
[18] POMOZI I,HORVTH G,WEHNER R.How the Clear-Sky Angle of Polarization Pattern Continues underneath Clouds:Full-Sky Measurements and Implications for Animal Orientation[J].Journal of Experimental Biology,2001,204(17):2933-2942.
Characteristics of Atmospheric Polarization Pattern and Its Application in Autonomous Navigation
FAN Zhi-guo,XU Chao,WU Chuan,GAO Jun
(Hefei University of Technology,School of Computer and Information,Anhui Hefei 23009,China)
For the complex and changing atmospheric environment, how to realize the modeling of atmospheric polarization pattern and the accurate characterization of the spatial and temporal variation is a difficult and hot topic in the study of atmospheric polarization pattern. In view of the application of the atmospheric polarization pattern in the field of polarized light autonomous navigation, through the analysis of the law of the atmospheric polarization pattern macroscopic variation, and by selecting the significant features used as navigation reference, the modeling method of the “∞” shape distribution features of the atmospheric polarization pattern is introduced, the feasibility of the “∞” shape distribution features of the polarized light for providing navigation information is illustrated as well as a new method for obtaining the polarized light navigation information is provided.
polarized light navigation;atmospheric polarization pattern;autonomous navigation;feature modeling;law characterization;heading information
2016-08-19;
2016-08-30
国家自然科学基金(61571175,61571177)
范之国(1979-),男,安徽霍山人。副教授,博士,主要从事大气偏振信息获取、处理与应用方面的研究。
通信地址:230009 安徽省合肥包河区屯溪路193号合肥工业大学98号信箱 E-mail:fzghfut@163.com
10.3969/j.issn.1009-086x.2017.03.001
O436.3;V249.3;Q811;TP212.9
A
1009-086X(2017)-03-0001-07
编者按:“2016年先进导航、制导与控制技术研讨会”成功举行。会议得到了国内从事空天防御的军方、军工单位、科研院所、高校等的积极响应和大力支持,共征集到论文40余篇,经过专家评审选出优秀论文10余篇进行了会议交流。《现代防御技术》特开辟专栏陆续刊登此次会议的优秀论文,供读者参考。
猜你喜欢
聊城大学学报(自然科学版)(2022年4期)2022-08-22
成都信息工程大学学报(2022年2期)2022-06-14
国际太空(2022年1期)2022-03-09
汉字汉语研究(2021年2期)2021-08-30
电子制作(2019年12期)2019-07-16
汉字汉语研究(2019年4期)2019-03-04
现代职业教育·中职中专(2018年11期)2018-06-11
小学生学习指导(低年级)(2018年5期)2018-04-24
光学仪器(2016年6期)2017-04-24
电脑知识与技术(2016年20期)2016-08-19
