
基于STM32的光伏发电自动跟踪系统设计
2017-06-24 10:57:19王男男丁虹民
电源技术 2017年2期
王男男,周 伦,丁虹民
(西南交通大学机械工程学院,四川成都610031)
基于STM32的光伏发电自动跟踪系统设计
王男男,周 伦,丁虹民
(西南交通大学机械工程学院,四川成都610031)
目前在光伏发电领域,大部分太阳电池板都是固定安装的,为了提高电池板的发电量,设计了一套基于STM32的太阳电池板自动跟踪系统。系统通过步进电机带动双轴机构,实现了电池板对太阳的二维跟踪。本系统以低功耗的STM32为核心处理器,在外围设计了光电跟踪传感器,阴晴检测以及GPS等模块,采用混合跟踪的控制方式提高了跟踪精度。介绍了系统的原理与组成,设计了一套低功耗的间歇跟踪算法。
STM32;光伏发电;自动跟踪;低功耗
随着世界经济的快速发展,能源危机和环境污染日益加重,为解决这些难题,很多国家都在致力于新能源的开发利用。在当下的新能源开发中,太阳能具有辐射量大,覆盖面广,清洁无污染等优点,应运而生的光伏发电技术近几年来一直被世界各国广泛关注和利用。但是由于太阳能存在密度低、不易收集等特点,使光伏发电的效率一直受到制约,因此,提高发电效率成为了当前光伏发电技术的研究热点[1]。
实践证明设计一套光伏自动跟踪系统,使太阳光线始终垂直照射光伏板,相比固定式的太阳电池板,可以有效提高电池板30%~40%的发电量[2]。目前的光伏跟踪技术还存在成本高、功耗高的问题,本文设计的跟踪系统以低功耗的STM32微控制器为主控芯片,采用间歇跟踪的控制算法每20分钟跟踪一次,系统在阴天时自动进入休眠状态,这样就在保证光伏跟踪精度的前提下有效控制了系统成本和功耗。
1 太阳运行方位计算
在地平坐标系中,太阳的运行方位主要由高度角和方位角两个参数决定。定义一个向量由入射点O指向太阳,向量与地平面的夹角定义为太阳高度角H,向量在地平面上的投影与南北方向线的夹角定义为太阳方位角A,其具体定义如图1所示。
太阳高度角的计算公式:

太阳方位角的计算公式:

式中:φ为当地地理纬度;θ为太阳赤纬角,计算公式为θ= 23.45°×sin[360×(284+n)/365],其中n为一年当中的第几天;ω为太阳时角,计算公式为ω=15°×(12-t),其中t为一天当中的时刻,取值范围为0~24 h。
由以上推理可知,只需知道当地的地理纬度和具体时间,可由式(1)~式(2)计算出任意时刻和任意地点的太阳方位[3]。

图1 太阳运行方位定义图
2 光伏跟踪原理分析
目前常用的光伏跟踪方案主要有两种:一种是光电跟踪,一种是视日运动轨迹跟踪。视日运动轨迹跟踪属于开环控制方式,通过所在地地理纬度和具体时间就可以计算出当前时刻本地的太阳方位,单片机计算每个时刻的太阳方位,在不同时刻驱动步进电机做出相应动作,调整电池板跟踪太阳,这种方法的优点是不容易受到外部杂散光源的干扰,同时不会受到天气变化的影响,但是由于是开环控制,所以对于自身的系统误差没有修正能力,长期跟踪容易造成误差累积,降低跟踪精度。光电跟踪是通过光敏电阻、光敏二极管等光敏传感器感知太阳方位的变化,单片机系统根据光敏器件检测到的光信号,驱动步进电机动作,这种跟踪方法本身属于闭环控制方式,具有较高的灵敏度和误差修复能力,但是系统容易受到外部干扰,外界杂散光源可能会造成系统的误动作,同时由于跟踪范围狭窄,容易丢失跟踪目标。
光电跟踪和视日运动轨迹跟踪各自都有优点和缺点,本文设计了一套融合两种控制策略的跟踪系统。根据不同的天气情况,采取不同的跟踪策略,在天气晴朗时,先采用视日运动轨迹跟踪进行粗跟踪,然后采用光电跟踪精确定位,在多云条件下,只采用视日运动轨迹跟踪。这种混合跟踪方法提高了跟踪精度,同时不易受到外界影响,保证了系统精度和稳定性[4]。
3 光伏跟踪系统硬件设计
光伏跟踪系统的主要模块有:光电跟踪传感器模块,负责采集光信号,根据太阳方位的变化发送控制指令到MCU;GPS模块,用来计算当地的经纬度信息,把经纬度信息转化为数字信号发送到MCU;光强检测模块,用来检测天气情况的变化,MCU会根据不同的天气状况采取不同的控制策略;电机驱动模块,用来驱动步进电机动作,带动双轴机构跟踪;MCU模块,采用STM32微控制器为主控芯片,处理来自不同模块的信息。系统的组成如图2所示。
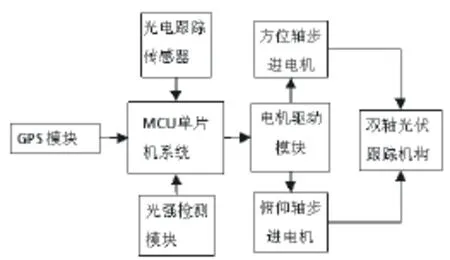
图2 光伏跟踪系统硬件设计
3.1 光电跟踪传感器的设计
采用四象限光电传感器作为光电跟踪装置,这种传感器的原理如图3所示,太阳光线经光学元件成像于四象限光敏面时,形成一个圆形光斑,光斑在光敏面被四个象限分成A、B、C、D四个部分,光斑面积分别为S1、S2、S3、S4,四个部分产生的光电流分别为i1、i2、i3、i4,光斑中心相对于光敏面中心X和Y方向的偏移分别为ΔX和ΔY。假如四个象限产生的电信号分别为 U1、U2、U3、U4,设偏差信号 UX=U1+U2-(U3+U4);UY=U1+U4-(U2+U3),实验证明光斑中心在X轴和Y轴方向的偏移量与UX、UY成正比[5]。
太阳直射电池板时,光斑中心与四象限传感器中心重合,太阳方位变化,光斑中心发生偏移,只要控制电池板转动使光斑中心偏移量ΔX和ΔY趋近于零,就可以达到光伏跟踪的目的。四象限光电传感器的输出信号是微弱的光电流,需要通过一个转换电路把光电流转换成STM32可以处理的电压信号。电流电压转换电路如图4所示。

图3 光电跟踪传感器原理
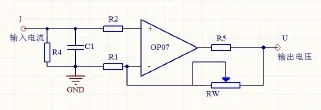
图4 电流电压转换电路
四个象限的光电流经过此电路就可以转换成为单片机可以处理的0~5 V电压信号,电路的输出电压与输入电流的关系为:

3.2 GPS模块设计
GPS模块的主要作用是获取当地的地理信息和时间信息,为视日运动轨迹跟踪提供参数依据。考虑到节省成本与降低功耗的因素,本系统采用U-blox公司生产的MAX-7独立定位模块。GPS定位模块的输出格式通常遵循NMEA 0138通讯协议,根据此协议的相关规范,GPS模块将地理位置信息和时间信息通过串口传送给STM32微控制器,本系统使用了GPRMC命令获取GPS的推荐最小数据量[6]。在GPRMC命令下,提取字段<1>、<2>、<3>、<5>、<9>用于计算太阳方位,这些字段的含义为:<1>表示UTC时间,时-分-秒(hhmmss)格式;<2>表示定位状态,A表示有效定位,V表示无效定位;<3>表示地理纬度,度-分(ddmm.mmmm)格式;<5>表示地理经度,度-分(ddmm.mmmm)格式;<9>表示UTC日期,日-月-年(ddmmyy)格式。
3.3 MCU模块设计
本系统采用STM32微控制器作为MCU控制平台,是由意法半导体 (ST Microelectronics)公司推出的第一款基于ARM Cotex-M3内核的微控制器。系统MCU采用中等容量增强型的STM32F103RBT6芯片,具有128 kB的闪存和20 kB的SRAM,最高工作频率可达72 MHz。这款STM32微控制器的功能强大,具有较高的精密和可靠性。它具备的两个多通道的12位ADC转换器可以接收来自四象限传感器的4路模拟信号,实现高精度模数转换,转换时间最短只有12.5个时钟周期。STM32F103RBT6具备一个用于电机控制的16位PWM高级控制计数器,可以实现死区控制和紧急刹车,提高了步进电机的驱动精度。STM32具有3种低功耗模式,分别为睡眠模式、停机模式和待机模式。在停机模式时,RTC不会停止,RTC闹钟或者任一外部中断信号可以将其唤醒,本系统在不跟踪太阳时,STM32就会进入停机模式,这种设计可以有效降低系统功耗。
4 光伏跟踪系统软件设计
系统的控制流程如图5所示,首先需要进行的是系统初始化,包括开启STM32系统时钟,设置中断优先级,设置串口和GPIO端口等操作。通过GPS模块获取当地的经纬度参数和实时时间,同时GPS可以获取当天的日出和日落时间,STM32由这些参数判断太阳是否升起。如果没有达到太阳升起时间,则系统自动进入休眠状态,太阳升起时系统自动唤醒并进入工作状态。在工作状态阴晴检测模块首先判断天气状况,根据光敏元件检测到的光照强度划分为三种天气状况,在晴天时采用混合跟踪方式,即根据太阳运行轨迹进行粗跟踪,然后进行光电跟踪消除跟踪误差;在多云天气状况下,只进行视日运动轨迹跟踪;在阴天时则不跟踪以减少不必要的功率消耗。系统采用间歇跟踪方式,在每次跟踪完成后,系统自动进入延时状态,每20分钟跟踪一次。当时间到达当天的日落时刻,双轴机构自动转到初始位置,系统进入到下一次循环。
5 结语
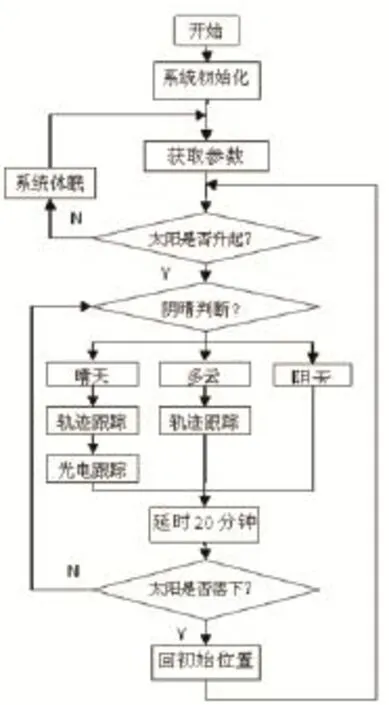
图5 系统的控制流程图
本文设计了一套基于STM32控制器的光伏电池自动跟踪系统,系统采用四象限光电传感器获取太阳方位变化的有效信号,同时采用GPS获取所在地的地理信息以实时计算太阳方位。本系统融合了光电跟踪和视日运动轨迹跟踪两种跟踪方法,采用间歇跟踪的控制算法。实践证明本系统不但具有较高的跟踪精度,同时有效降低了系统功耗。本文研究的光伏跟踪系统可以有效提高光伏电池的发电量,为提高光伏电池的发电效率提供了一种新方法。
[1]SHI Y B,GE C Z,WANG M M,et al.Design of an intelligent solar energy tracking system based on maximum power point tracking with light search perceptive technology[J].Power System Technology,2014,38(1):87-92.
[2]刘阳,匡博,张体勇.ARM7处理器太阳能光伏发电自动跟踪控制系统[J].电源技术,2014,38(1):87-89.
[3]张鹏飞.光伏发电自动跟踪系统的设计[D].哈尔滨:哈尔滨理工大学,2009:23-26.
[4]范学超.自动跟踪式独立太阳能光伏发电系统的EDA设计[J].电源技术,2014,38(10):1889-1978.
[5]FENG Q,GENG A H.Design of data acquisition system of fourquadrant photodetector based on LabVIEW[J].Computer Measurement&Control,2013,21(5):1397-1403.
[6]李烨.基于GPS和新型光电传感器的太阳自动跟踪系统[D].苏州:苏州大学,2012:12-14.
Design of PV automatic tracking system based on STM32
WANG Nan-nan,ZHOU Lun,DING Hong-min
(School of Mechanical Engineering,Southwest Jiaotong University,Chengdu Sichuan 610031,China)
Currently in the field of photovoltaic power generation,most solar panels were fixedly installed.A set of automatic tracking system of solar panel based on STM32 was designed to improve the power generation of solar panel. The two-dimensional tracking of the solar panel was realized as the system drives the biaxial mechanism through the stepping motor.The low-power STM32 was taken as the core processor,several modules including photoelectric tracking sensor weather detection and GPS were designed in the peripheral,and the tracking accuracy was improved by the hybrid tracking control method. The principle and composition of the system were mainly introduced,and a set of low power intermittent tracking algorithm was designed.
STM32;photovoltaic power generation;automatic tracking;low power consumption
TM 615
A
1002-087 X(2017)02-0247-03
2016-07-06
王男男(1988—),男,山东省人,硕士生,主要研究方向为机械电子工程,嵌入式系统开发。
猜你喜欢
都市(2023年6期)2023-12-28 07:56:54
诗歌月刊(2023年1期)2023-03-22 14:06:24
中学生数理化·高一版(2022年3期)2022-04-05 08:17:14
幼儿园(2021年12期)2021-11-06 05:10:20
阅读(高年级)(2019年9期)2019-11-15 07:22:54
阅读与作文(小学高年级版)(2019年8期)2019-10-16 04:46:50
电子测试(2018年11期)2018-06-26 05:56:04
中学生数理化·七年级数学人教版(2017年4期)2017-07-08 11:48:34
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
