
中小功率农用轮式拖拉机转向机构参数优化设计
2017-06-24 13:27:30彭才望肖林峰
时代农机 2017年4期
彭才望,肖林峰
(湖南农业大学工学院,湖南 长沙 410128)
中小功率农用轮式拖拉机转向机构参数优化设计
彭才望,肖林峰
(湖南农业大学工学院,湖南 长沙 410128)
为提高中小功率农用轮式拖拉机的转向特性、保持直线形式性能 、减少轮胎磨损以及降低转向阻力,文章通过建立转向车轮转向时的数学模型,以置梯形作为转向梯形为例,将外侧转向轮实际转角与理论转角在转向范围内的差值最小作为转向机构参数最优化的目标。通过实例优化计算绘制左右转向车轮转角曲线,结果表明:同一内侧转向轮αmax=35°时,实际外侧转向轮转角β1与理想外侧转向轮转角β相差1.5°,差值较小。同时,左右转向轮转角关系曲线图反映左右车轮在转向过程中存在互换性,左右车轮转角关于曲线β=-α对称。因此,建立数学模型,采用优化设计方法对解决轮式拖拉机的转向机构设计与提高转向性能方面具有指导意义和重要的实际应用价值。
轮式;拖拉机;转向机构;优化设计
转向梯形机构是中小功率农用轮式拖拉机转向机构的主要组成部分,理想的转向梯形机构能保证农用拖拉机在转向过程中转向车轮处于纯滚动状态,提高驾驶员的操作轻便性。但是,在农用轮式拖拉机实际转向过程中,转向梯形机构不能保证所有车轮都满足阿克曼转向原理而处于理想的转向状态,因而造成轮胎磨损严重、转向性能差以及驾驶员疲劳等。文章以整体后置转向梯形机构为研究基础,结合轮式拖拉机转向特性,建立转向梯形的平面数学模型,分析计算外侧转向轮实际和理论转角差值,并外侧转向轮实际转角与理论转角在转向范围内的差值最小作为转向机构参数最优化的目标,以得到转向机构的合理结构参数,提高转向性能,降低轮胎磨损。
1 轮式拖拉机整体式转向机构转向特性
(1)轮式拖拉机整体式转向机构理论转向特性。轮式农用拖拉机转向时,理想条件下,车轮转弯时,所有车轮轴线在地面上的投影应该相交于一个点,满足阿克曼转向原理。例如,当车轮右转时,内外车轮转弯半径不一样且不在同一直线上,外转向车轮的转角β应小于内转向车轮转角α,如图1所示。

图1 轮式拖拉机转向示意图
根据轮式拖拉机转向内外车轮转角差值,在满足转向时转向车轮无滑移仅存在纯滚动条件下,且忽略轮胎侧偏弹性与前轮定位等因素条件下,内外车轮转角满足下面三角函数公式:

式中,K为左右两侧主销中心线的延长线到地面两交点之间的距离;L为轮式拖拉机前后车轮轴距;β为外侧车轮转角;α为内侧车轮转角。

轮式拖拉机使用过程中,车轮轴距L和左右两侧主销中心线的延长线到地面两交点之间的距离M两个参数固定不变。轮式拖拉机内外轮转向时,二者转向角关系满足下列关系:令当轮式拖拉机转向时,内外轮转角满足函数关系β=f(a)时,则轮式拖拉机将绕O点做圆周运动,这是满足阿克曼转向的理想转向情况;当内外轮转角不满足函数关系β=f(a)时,则轮式拖拉机转向时绕的圆心O点发生变化,造成内外轮既有滑动现象又有滚动现象,从而造成轮胎磨损严重。
(2)轮式拖拉机整体式转向机构实际转向特性。轮式拖拉机因工作环境和结构特点,一般采用整体式转向梯形的转向机构来满足转向特性。实际设计中,轮式拖拉机转向梯形机构不能在任何情况下都能满足转向时内外轮转角函数关系(2)式。因此,文章以整体式后置梯形转向机构为研究对象,分析轮式拖拉机整体式转向机构的实际转向特性。
整体式后置梯形转向机构如图2所示,假定车辆左转,设此时左转向轮转角为α,右转向轮转角为β。

图2 整体式转向机构图
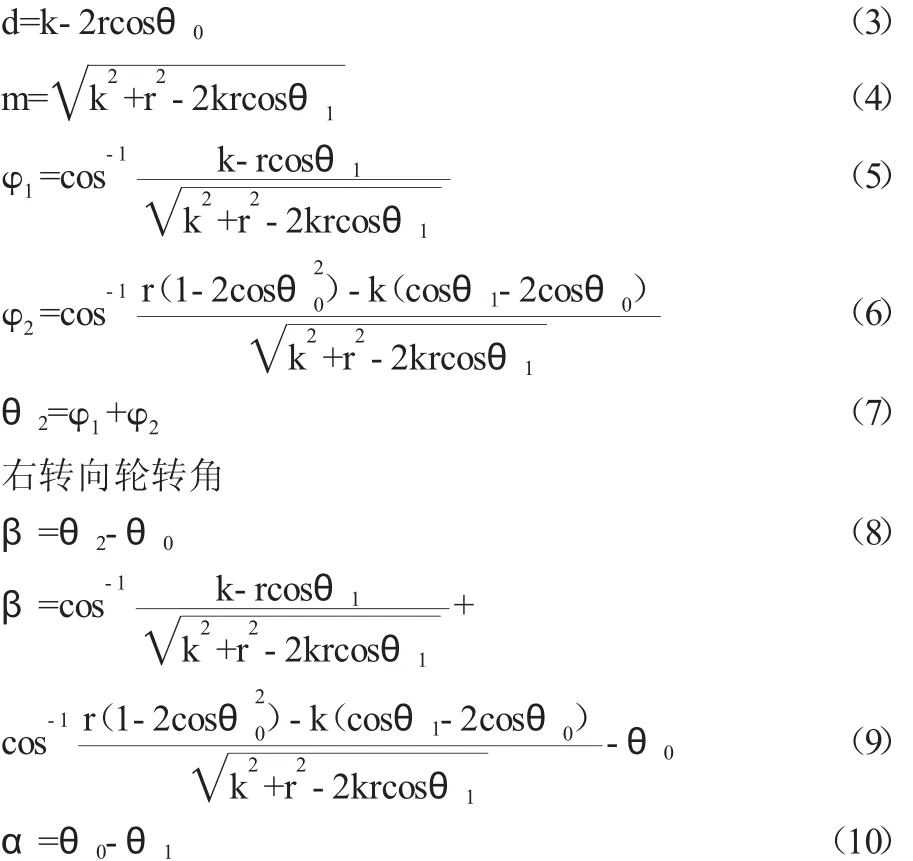
将式(10)代入式(9)中,轮式拖拉机整体式后置梯形转向机构左右转向轮转角关系式

2 轮式拖拉机整体式转向机构转向参数确定
(1)建立目标函数。轮式农用拖拉机实际左转向过程中,整体式后置梯形结构的转向机构很难保证外转向轮转角β在各个相对应于内转向轮转角α时相一致。根据机械设计优化目标,尽可能地使外转向车轮转角β在各处接近或相似,以提高转向性能。文章将外侧转向轮实际转角与理论转角在转向范围内的差值最小作为转向机构参数最优化的目标,根据方差理论,得到实际外侧转向轮转角与理论外侧转向轮转角两函数的最小均方根误差:


(3)转向梯形结构参数约束。轮式农用拖拉机在实际转向过程中,考虑转向角、转向横拉杆轴向受力大小,转向梯形臂r变小,则转向横拉杆受力增大;反之,容易造成转向机构局部部件干涉,不利于转向。因此,转向梯形臂r满足如下约束条件:

式中,K由转向机构结构决定,K满足:Kmin≤K≤Kmax,K过大,造成转向机构庞大;K过小,造成转向横拉杆受力过大。
文章以后置梯形为转向梯形结构分析为例,后置梯形转向机构的转向底角θ0过大将导致梯形臂和转向轮胎造成干涉;θ0过小,将导致转向梯形机构结构参数失去最优值,满足如下约束关系。

文章以轮式农用拖拉机后置梯形为转向机构为研究对象,后置梯形转向机构为四连杆机构,其传动角根据机械原理设计要求,δ≥δmin=35°,且满足下列约束关系;

式中,β1为外侧转向轮的实际转角;β为外侧转向轮的理论转角;βmax为外侧转向轮的转向极限角;βmin为外侧转向轮的转向极小角。
(2)设计变量。轮式拖拉机后置梯形转向机构的结构参数主要有两车轮主销间距长度K、梯形臂r、转向横拉杆d、转向梯形底角θ0等。其中,两车轮主销间距长度K由拖拉机本身结构决定,作为已知参数。而转向横拉杆长度d受转向梯形臂r和转向梯形底角θ0决定。因此,文章将转向梯形臂r和转向梯形底角θ0作为优化设计的参数变量。即,
3 实例计算及优化分析
文章根据轮式农用拖拉机后置梯形转向机构的车轮转角函数关系式(11),基于C++语言编写程序,以左轮转向轮转角为纵坐标、右转向轮转角为横坐标建立直角坐标系,绘制轮式农用拖拉机后置梯形转向机构理想的左、右轮转角关系曲线。

图3 转向机构左右轮转角关系
以某款整体式后置梯形转向机构为例,实际测量其参数为:轴距L=4698mm,主销间距K=1482mm,梯形臂长r=200mm,梯形底角θ0=76°,左转向轮极限转角αmax=35°。经过程序计算,绘制出轮式农用拖拉机后置梯形转向机构实际的左、右轮转角关系曲线,如图5所示。转角关系曲线图,结果表明:基于文章优化设计目标,同一内转向轮转角时,一定程度上降低了实际外侧车轮转角与理想外侧车轮转角的误差,对降低轮胎磨损,提高轮式农用拖拉机转向性能具有重要的意义。转向机构左右轮转角关系曲线图表明左右车轮转角关于曲线=-α对称,轮式拖拉机实际左右转向过程中,左右轮发生互换。文章提出的优化设计方法与目标一定程度上为轮式拖拉机转向机构的优化设计提供了理论依据,具有实际应用意义。
通过对某款整体式后置梯形转向机构结构参数进行计算对比分析,同一内侧转向轮αmax=35°时,实际外侧转向轮转角β1与理想外侧转向轮转角β相差1.5°,差值较小。同时,转向轮转角关系曲线图也反映左右车轮转角关于曲线β=-α对称,表明汽车左右转向过程中,实质上左右轮发生了互换,左右轮转角存在对称关系。
4 结语
文章在建立后置梯形转向机构的数学模型上,将外侧转向轮实际转角与理论转角在转向范围内的差值最小作为转向机构参数最优化的目标,得到转向结构参数优化值。通过某款整体式后置转向梯形为实例,优化计算分析转向机构左右轮
[1]李军.基于MATLAB优化工具箱的农用运输车转向梯形优化设计[J].农机化研究,2011,32(5):147-155.
[2]骆贤宗,高群,宗志坚.电动汽车转向机构的优化设计[J].机械传动,2010,34(9):82-84.
[3]sIMl0NEscu P A,7I’ALPAsANu I.synthesis and analysis of the steering system of an adjustable tread-width four-wheel tractor[J].Mechanism and Machine Theory,2007,42(5):526-540.
[4]骆贤宗,高群,宗志坚.电动汽车转向机构的优化设计[J].机械传动,2010,34(9):82-84.
[5]向铁明,任恒山,朱易铭.赛车转向梯形优化设计方法——厦门理工学院28号FSAE赛车转向梯形设计[J].厦门理工学院学报,2009,17(4):48-50.
[6]王望予.汽车设计(第4版)[M].北京:机械工业出版社,2004.
[7]高东升.汽车转向梯形的优化设计[J].汽车技术,1986,16(1):17-21,43.
[8]姚明龙,王福林.车辆转向梯形优化设计及其求解方法的研究[J].机械设计与制造,2007,44(5):24-26.
[9]高东升.汽车转向梯形的优化设计[J].汽车技术,1986,16(1):17-21,43.
[10]卞学良,李珂,杜清.基于连续型权重函数的汽车转向梯形优化[J].拖拉机与农用运输车,2010,37(3):32-33.
[11]毛务本,韩锐.双横臂独立悬架转向梯形机构断开点的优化[J].江苏大学学报:自然科学版,2004,25(2):124-127.
Parameter Optimization Design of Steering Mechanism of Medium and Small Power Agricultural Wheeled Tractor
PENG Cai-wang,XIAO Lin-feng
(College of Engineering,Hunan Agricultural University,Changsha,Hunan 410128,China)
In order to improve the steering characteristics of small and medium-sized agricultural wheeled tractors,to maintain the performance of straight line form,reduce tire wear and reduce the steering resistance,the paper turns the outer side by setting the trapezoidal trapezoid as the steering trapezoid,taking the difference between the actual angle of the wheel and the angle of the theoretical angle in the steering range as the minimum goal of the steering mechanism parameter optimization.The results show that when the same inner steering wheel αmax=35°,the actual outside steering wheel angle β1is different from the ideal outside steering wheel angle β by 1.5,and the difference is small.At the same time,the left and right steering wheel angle curve shows the left and right wheels in the process of interchangeability,left and right wheel angle on the curve β=-α symmetry.Therefore,in the establishment of mathematical model,the use of optimal design method can help solve the wheeled tractor steering mechanism design and has a guiding significance and important practical value in improving the steering performance.
wheeled;tractor;steering mechanism;optimal design
S219.02
A
2095-980X(2017)04-0058-03
2017-03-16
湖南省教育厅项目(16C0774)。
彭才望(1988-),男,湖南衡阳人,讲师,主要研究方向:农业机械化及自动化。
猜你喜欢
军民两用技术与产品(2021年10期)2021-03-16 06:05:36
湖北农机化(2020年4期)2020-07-24 09:07:00
制造技术与机床(2019年12期)2020-01-06 03:18:24
经济技术协作信息(2018年7期)2019-01-14 03:05:40
中国军转民(2018年1期)2018-06-08 05:52:57
环境科技(2016年4期)2016-11-08 12:19:04
新农业(2016年21期)2016-08-16 11:52:07
水利科技与经济(2016年3期)2016-04-22 01:04:50
国际感染病学(电子版)(2016年2期)2016-03-09 04:35:56
中国交通信息化(2014年6期)2014-06-05 03:12:06
