
基于AMESim的采油树送入工具液压系统仿真
2017-06-23 13:12程友祥张德华重庆前卫海洋石油工程设备有限责任公司重庆400中国石油大学北京机械与储运工程学院北京049
石油矿场机械 2017年3期
程友祥,张德华,戚 昱,赵 毅(.重庆前卫海洋石油工程设备有限责任公司,重庆400;.中国石油大学(北京) 机械与储运工程学院,北京049)
基于AMESim的采油树送入工具液压系统仿真
程友祥1,张德华2,戚 昱2,赵 毅2
(1.重庆前卫海洋石油工程设备有限责任公司,重庆401120;2.中国石油大学(北京) 机械与储运工程学院,北京102249)
为了初步验证水下采油树送入工具的液压缸结构设计的合理性,以及液压元件的选型是否正确,以水下立式采油树送入工具所需完成的动作为基础,设计液压系统。基于AMESim软件进行模型搭建、参数设置与系统仿真,得出水下立式采油树送入工具安装时间的估计值,分析液压系统的同步性。仿真结果表明,该液压缸的结构设计合理,符合工作要求,而且有较好的同步性。为现场液压系统的安装和选型提供参考。
水下;采油树;安装设备;液压系统;AMESim软件
我国海洋油气资源颇为丰富,是未来油气资源增量的主力[1-2]。水下生产系统是支撑海洋油气开发的重要组成部分,主要包括:水下采油树、水下管汇、水下控制系统、出油管线、跨接管、水下分离设备、水下增压设备等,采油树是其中尤为重要的的装置[3]。国外水下采油树的主要生产国有美国、英国、意大利、巴西等,美国产水下采油树的技术和产品最领先。目前,FMC、Cameron、Vetco Gray和Aker Kraemer Subsea几家公司控制了水下采油树约90%的全球市场份额。国内研制生产水下采油树的公司主要有:宝鸡石油机械有限责任公司、重庆前卫海洋石油工程设备有限责任公司、上海神开石油化工装备股份有限公司、江苏金石机械集团等。
对采油树的下放安装是钻完井工程的重要组成部分。安装采油树主体时,由绞车或者钻杆带动采油树下放机具,当采油树下放到井口指定位置时,将采油树与井口的连接装置进行连接,测试并判断采油树是否和井口连接完毕。随后,锁紧采油树井口的密封圈,并对采油树密封机构进行测试,连接输油管道[4]。
本文通过对水下立式采油树配套工具中的采油树安装工具进行液压系统的仿真,目的是建立完整可靠的液压系统,使工具顺利完成预定的动作。在已经完成对工具设计及预期动作的基础上,结合实际工作环境的具体需求,设计出结构合理、性能稳定、控制准确的液压控制系统。AMESim软件因其功能齐、建模简便等优点,在流体、机械等复杂系统仿真和分析中被广泛采用。本文基于AMESim软件对各液压系统进行仿真,包括液压回路的建立、液压元件的选型、工作参数的选择与设置、对仿真结果的分析。
1 采油树送入工具的液压系统简述
水下采油树送入工具用于安装/回收水下采油树主体,具有2种主要功能:
1) 锁紧并承载水下采油树。在安装设备(钻杆或吊机)与水下采油树之间提供连接界面(多为钻杆适配器或吊耳),如图1所示。
2) 提供液压回路。由ROV协助,通过液压系统锁紧/释放采油树到水下井口。
a 使用钻杆下放的采油树送入工具
b 使用钢丝绳下放,有导向框架的采油树送入工具
1.1 设计基础
1) 采油树的主要参数。
外形尺寸(长×宽×高)
3.68 m×4.20 m×5.43 m
质量
约50 t
采油树导向架中心与导柱之间的间距
1 828.8 mm
2) 采油树送入工具设计参数。
采油树送入工具压力级别
68.94 MPa(10 000 psi)
液压锁定额定压力
20.68 MPa(3 000 psi)
采油树送入工具支承能力
2.225 MN(500 000 lbf)
额定温度等级U-V
-18~121 ℃
1.2 液压系统工作步骤
1) 采油树送入工具与采油树的连接。
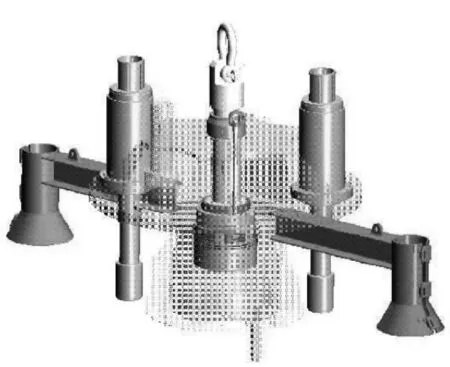
启动采油树送入工具的液压系统,向控制送入工具与采油树连接的液压腔中注入液压油,卡爪驱动环在液压力的作用下向下运动,驱动卡爪下端向内收缩,卡入采油树上端的凹槽中,完成采油树送入工具与采油树之间的连接。如图2所示。
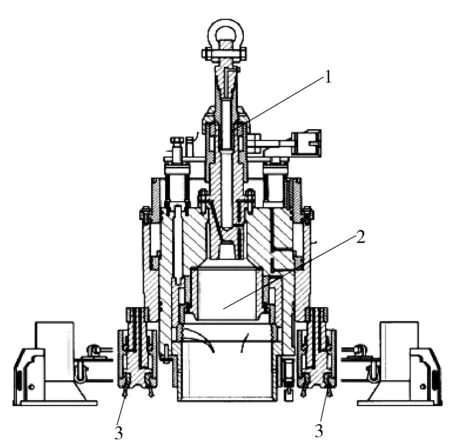
1—采油树送入工具;2—采油树;3—连接器卡爪。图2 送入工具与采油树连接示意
2) 采油树送入工具与采油树锁定推杆的连接。
在采油树的送入工具上有2个液压腔,负责控制送入工具与采油树锁定推杆的连接。采油树送入工具与采油树锁定推杆的连接操作流程如下:
①向第1个液压腔加压,驱动活塞向下运动,调整推杆锁块的位置,使推杆锁块运动到与推杆凹槽相对应的位置,此时,支承板底面与推杆上端面贴合。
②推杆锁块达到指定位置后,向第2个液压腔注入液压油。同时,第1个液压腔保持液压力。由于支承板底面与推杆上端面贴合,推杆驱动活塞不能向下运动。因此,活塞、推杆锁紧驱动环和固定板向上运动,推杆锁紧驱动环驱动推杆锁块沿支承杆向内运动,推杆锁块嵌入推杆上端的凹槽中,完成采油树送入工具与采油树锁定推杆的连接。
3) 采油树与井口连接。
完成采油树送入工具与采油树锁定推杆的连接后,保持第2个液压腔的压力,向第1个液压腔继续加压。推杆驱动活塞、推杆锁紧驱动环、固定板、支承板、推杆锁块和支承杆同时向下运动,带动采油树锁定推杆向下运动,将采油树锁紧到井口上。
2 仿真模型的建立
采油树送入工具中的液压腔与推杆可以看作是液压缸,根据3个不同的部分,建立3个不同的仿真模型。根据液压系统的不同需求,基于AMESim分析软件搭建仿真模型,并进行仿真分析。
2.1 送入工具与采油树连接过程仿真模型
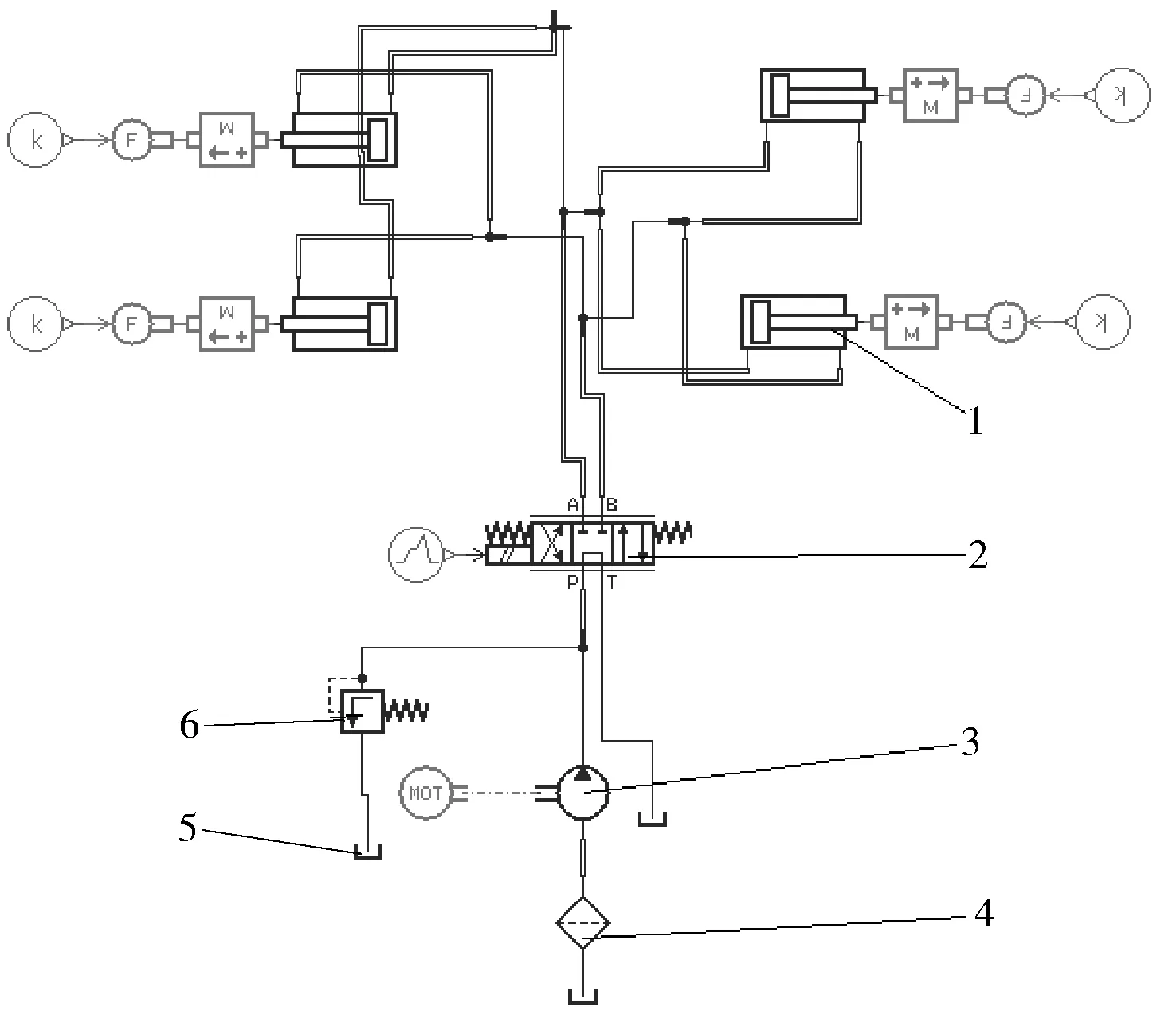
在采油树送入工具与采油树的连接过程中,液压腔1、液压腔2、卡爪驱动环和壳体组成1个液压缸,如图3中的液压缸(序号1)。在周向上共有6个相同结构,调用AMESim中的液压库、信号库、机械库,搭建如图3所示的仿真模型。
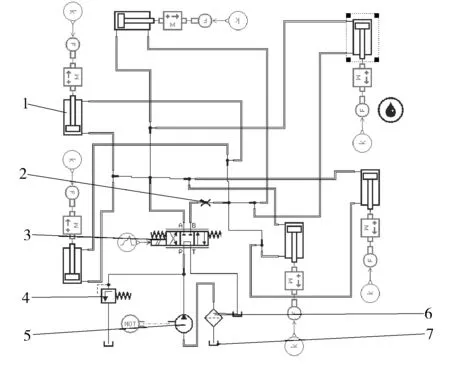
1—液压缸;2—节流阀;3—换向阀;4—溢流阀;5—液压泵;6—过滤器;7—油箱。图3 送入工具与采油树连接过程仿真模型
2.2 送入工具与采油树锁定推杆连接过程仿真模型
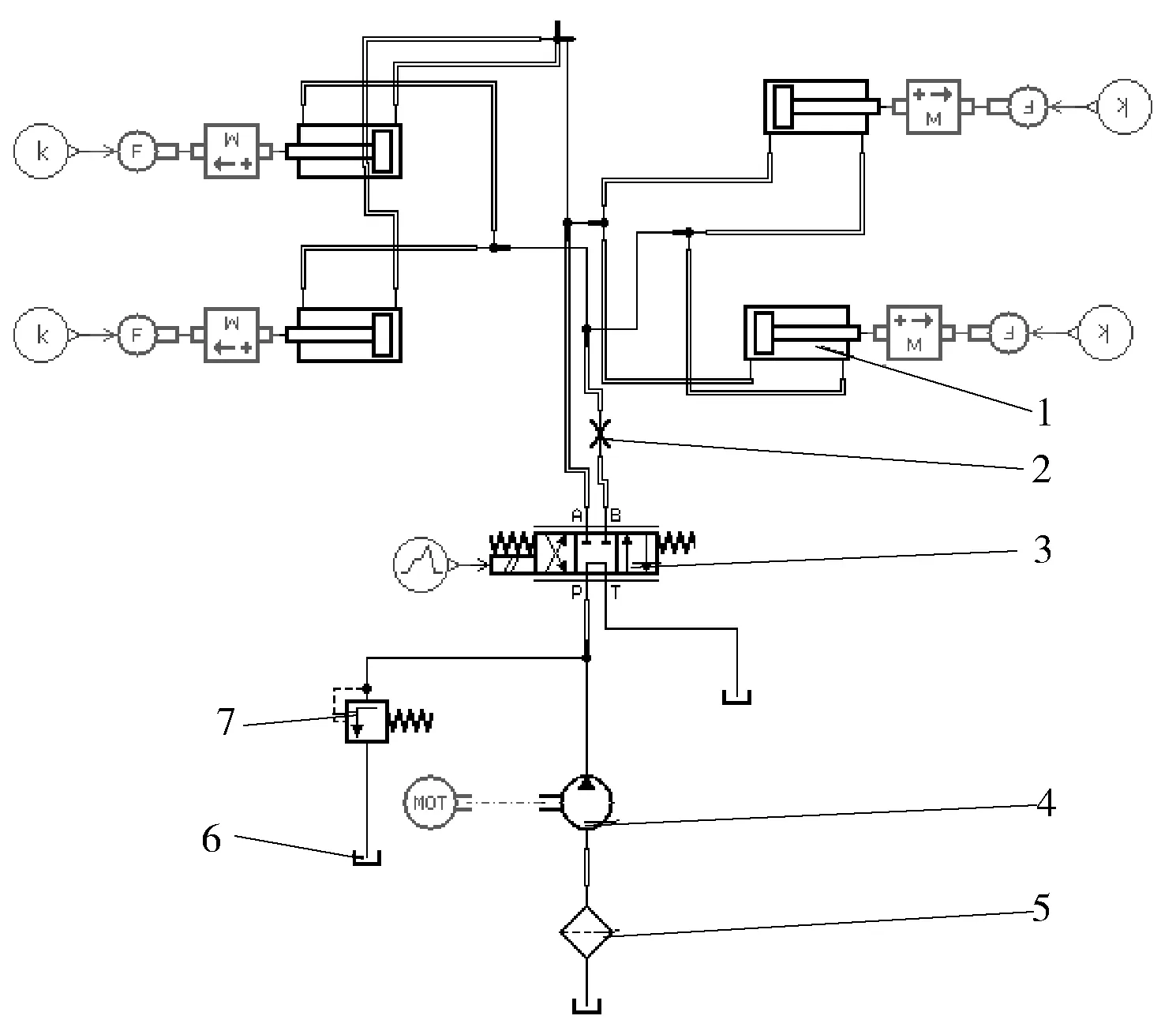
在采油树送入工具与采油树锁定推杆的连接过程中,液压腔3、液压腔4、活塞以及壳体可以看作是1个液压缸,如图4中的液压缸(序号1)。周向上有4个相同结构,调用AMESim中的液压库、信号库、机械库,建立如图4所示的仿真模型。
1—液压缸;2—换向阀;3—液压泵;4—过滤器;5—油箱;6—溢流阀。图4 送入工具与采油树锁定推杆连接过程仿真模型
2.3 锁紧锁块过程仿真模型
在采油树送入工具与采油树锁定推杆的连接过程中,还有一个将推杆锁块嵌入推杆上端的凹槽中的动作。此过程中,液压腔5、推杆驱动活塞、壳体可以看作是1个液压缸,如图5中的液压缸(序号1)。调用AMESim中的液压库、信号库、机械库,建立如图5所示的仿真模型。
1—液压缸;2—节流阀;3—换向阀;4—液压泵;5—过滤器;6—油箱;7—溢流阀。图5 锁紧锁块过程仿真模型
3 仿真参数的设置
进入AMESim的参数模式,对仿真模型中每个元件设置所需要的参数。采油树送入工具的液压缸尺寸参数及工作载荷在结构设计时就已经确定;模型的全局性液压参数,例如液体的体积模量、密度、动力黏度和工作温度等选择为AMESim的默认值。列出各仿真模型中的液压缸参数,如表1~3所示。
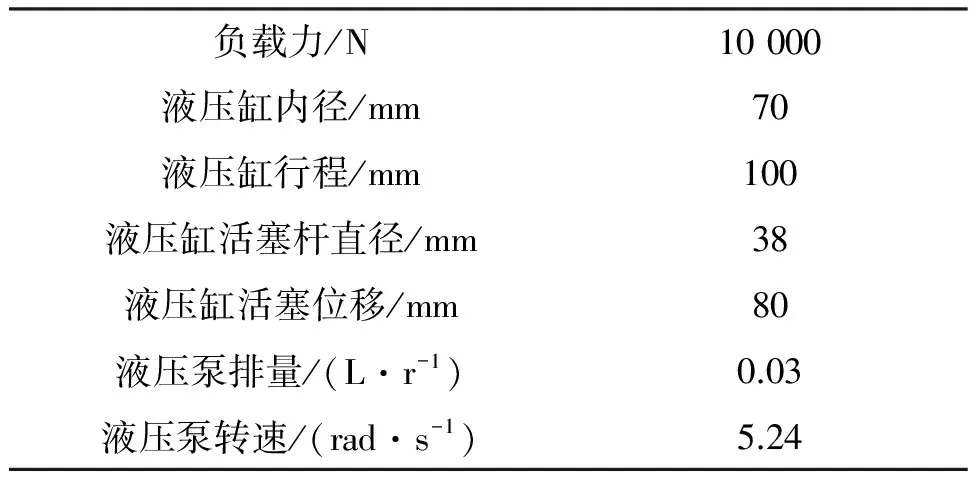
表1 送入工具与采油树连接过程仿真模型参数
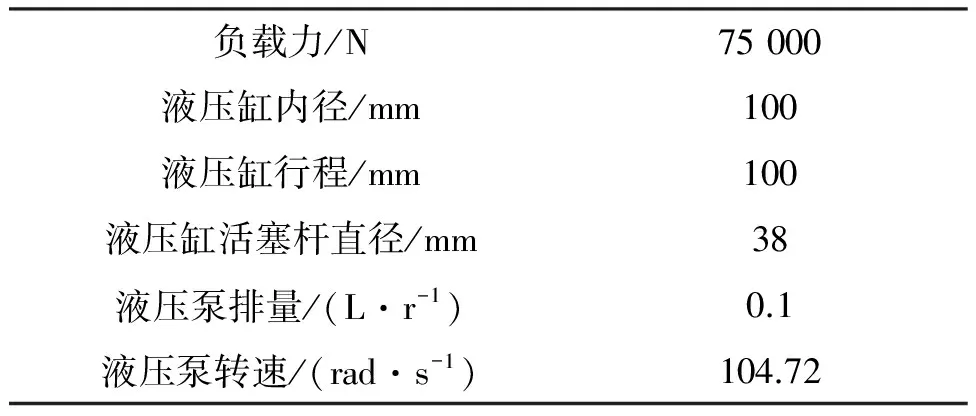
表2 送入工具与采油树锁定推杆连接过程仿真模型参数
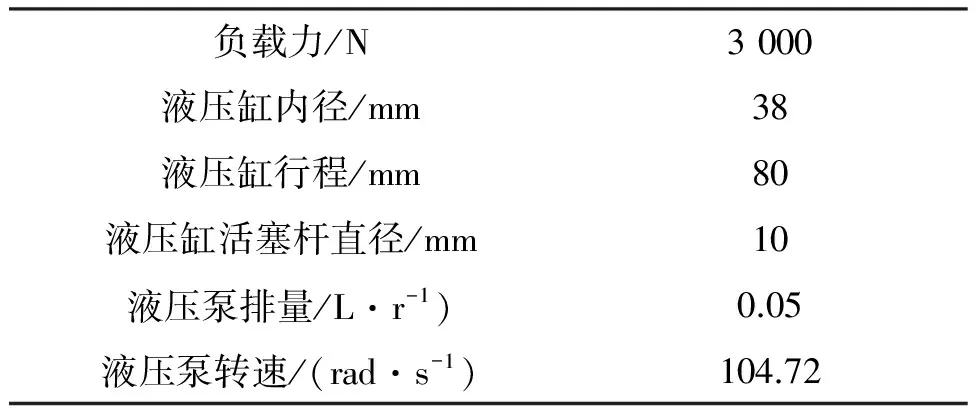
表3 推动锁块过程参数
4 仿真结果及分析
图6为送入工具与采油树连接过程的仿真结果。图中纵坐标代表输入/输出位移,单位m;横坐标代表时间,单位s。从图6可以看出:
1) 将采油树送入工具与采油树相连接,整个过程所需时间约为37 s。
2) 图中曲线为6个液压缸的6条运动曲线完全重叠,可以看出6个液压缸可以同时驱动卡爪驱动环的运动,保证了动作的同步性。
图7为送入工具与采油树锁定推杆连接过程的仿真结果。图中纵坐标代表输入/输出位移,单位m;横坐标代表时间,单位s。从图7的仿真结果可以看出:
1) 采油树送入工具推杆向下移动,将采油树锁定到井口的时间约为65 s。
2) 推动采油树送入工具与采油树锁定推杆相连接的4个液压缸的4条运动曲线能叠加在一起,说明液压系统可以保证运动的同步性。
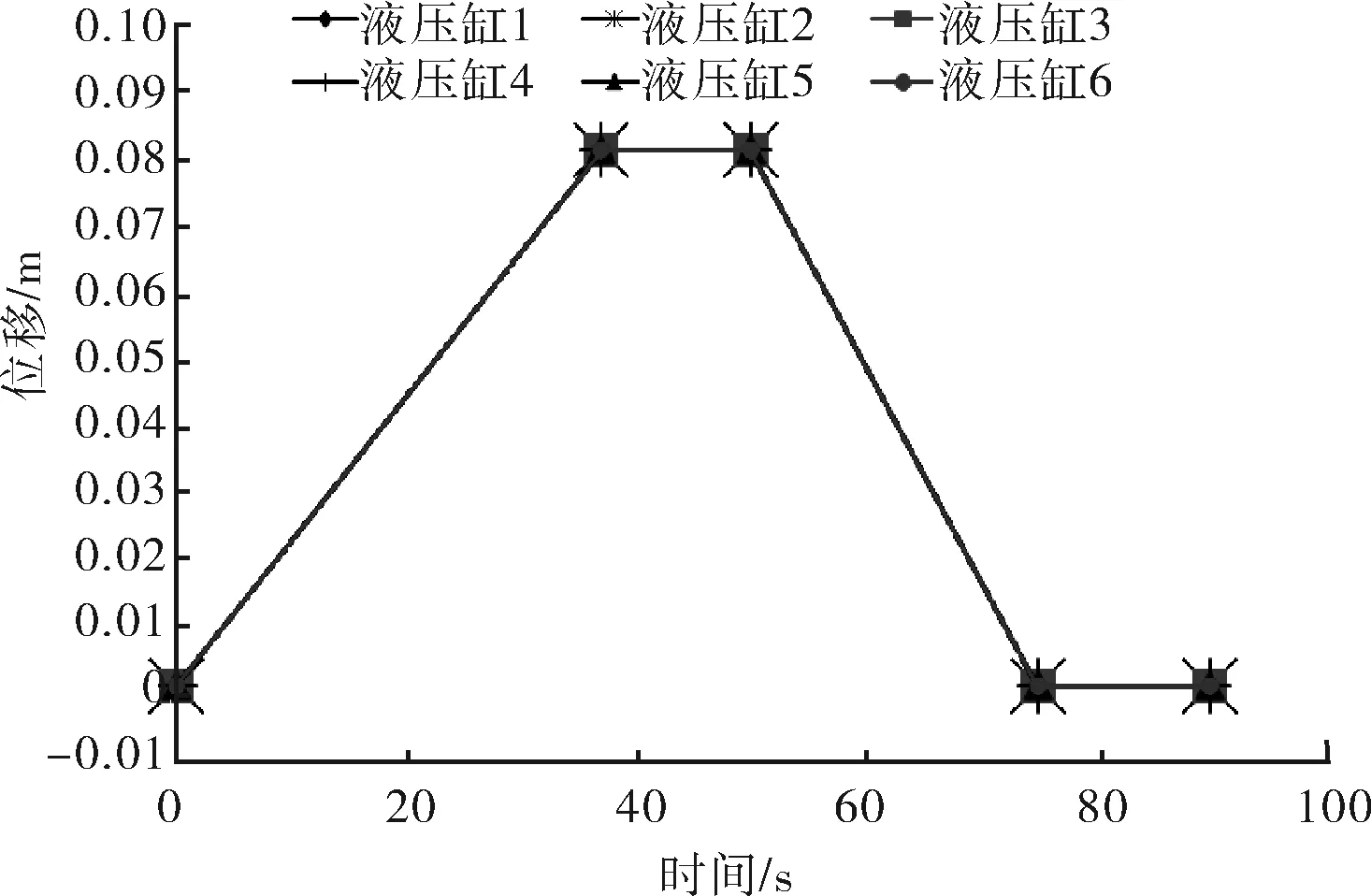
图6 送入工具与采油树连接过程仿真结果
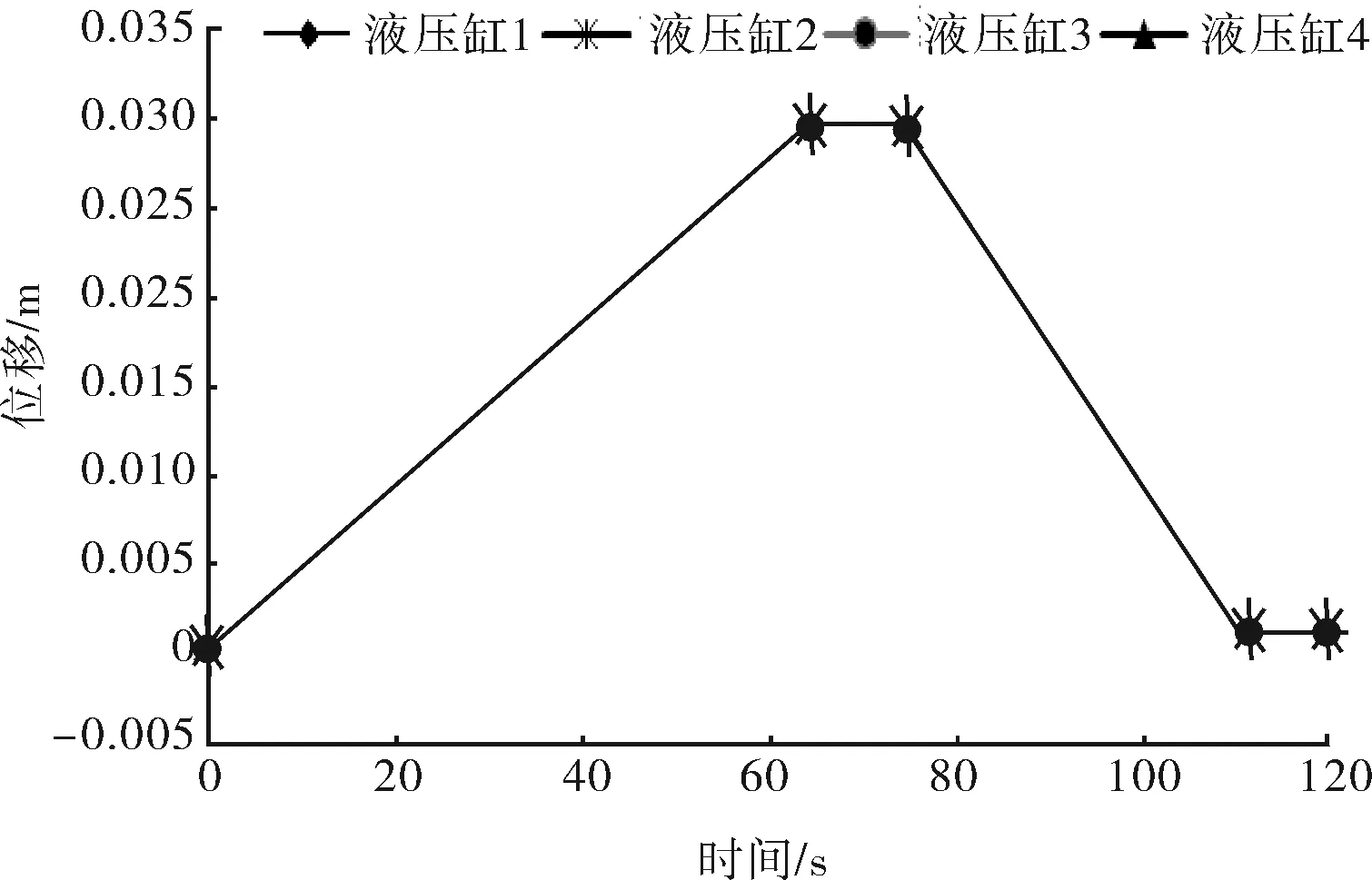
图7 送入工具与采油树锁定推杆连接过程仿真结果
图8为推动锁块过程的仿真结果。图中纵坐标代表输入/输出位移,单位m;横坐标代表时间,单位s。从图8可以看出:
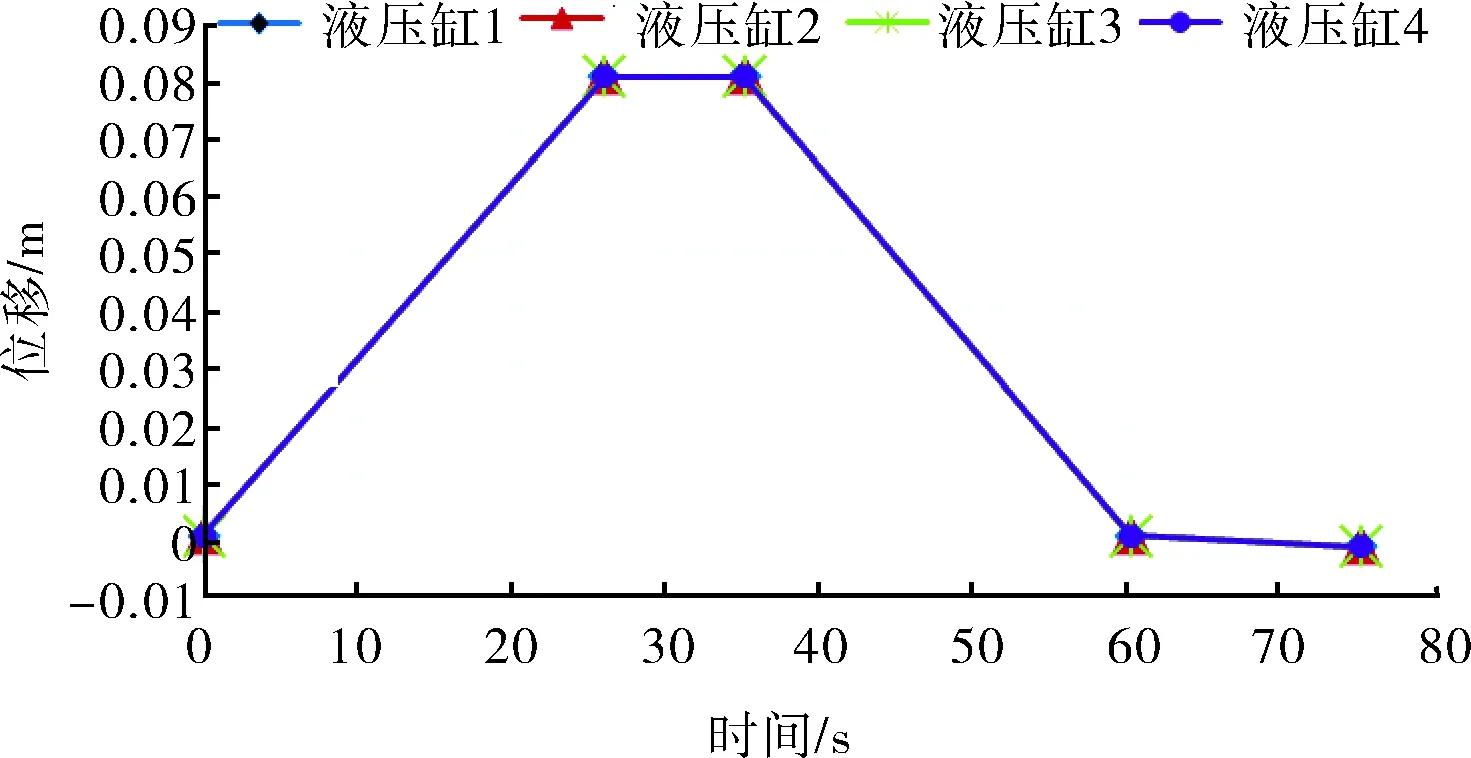
图8 推动锁块过程仿真结果
1) 锁紧过程所需的时间约为26 s,相比前两个过程有所减少,这是因为锁紧过程的位移和克服的摩擦力都较小。
2) 采油树送入工具4个液压缸的四条运动曲线重叠,说明同步性良好。
5 结论
1) 利用AMESim 软件的强大功能,对采油树送入工具的不同工作过程分别进行建模,合理参数设置并进行仿真,得出较为理想的液压缸位移-时间仿真曲线,对每一步安装过程所需时间有了初步估计。
2) 每一步安装过程都由若干个相同液压缸进行驱动,其位移-时间曲线在同一幅图上能很好地叠加在一起,表明液压系统具有较好的同步性。
3) 仿真结果表明,采油树送入工具的液压缸结构设计合理,符合工作需求,而且有较好的同步性。采油树送入工具中所选的液压系统和元件是正确的,对现场液压系统的安装和选型具有指导意义。
[1] 王建文,王春升,杨思明.水下生产系统开发模式和工程方案设计[J].中国造船,2011(A02):27-33.
[2] 丁艺,陈家庆.深水海底油水分离的关键技术分析[J].过滤与分离,2009,19(2):10-15.
[3] 罗晓兰,秦蕊,康有田,等.电潜泵式水下采油树油管挂工程设计方法研究[J].中国海洋平台,2013,28(3):10-14.
[4] 肖易萍,苏立国,张宪阵,等.水下采油树及下放安装技术研究[J].石油矿场机械,2014,43(8):70-73.
[5] 余佑官,龚国芳,胡国良.AMESim仿真技术及其在液压系统中的应用[J].液压气动与密封,2005(3):28-31.
[6] 肖岱宗.AMESim仿真技术及其在液压元件设计和性能分析中的应用[J].舰船科学技术,2007,29(z1):142-145.
[7] 龚进,冀谦,郭勇,等.AMESim仿真技术在小型液压挖掘机液压系统中的应用[J].机电工程技术,2007,36(10):111-114.
[8] 邬国秀.基于AMESim的阀控液压缸液压伺服系统仿真[J].机械,2008,35(1):33-35.
[9] 张磊,畅元江,刘秀全,等.基于AMESim的平台隔水管张紧器建模与仿真研究[J].石油机械,2013,41(12):38-42.
[10] 张小宇.基于AMESim的液压控制系统建模及仿真[J].煤矿机械,2011,32(2):71-73.
Hydraulic System Simulation of Oil Production Tree Feeding Tool
CHENG Youxiang1,ZHANG Dehua2,QI Yu2,ZHAO Yi2
(1.ChongqingVanguardOffshorePetroleumEngineeringEquipmentCo.,Ltd.,Chongqing401120,China;2.CollegeofMechanicalandTransportationEngineering,ChinaUniversityofPetroleum,Beijing102249,China)
In order to verify the rationality of the structure design of the hydraulic cylinder of the underwater oil tree,and the validity of hydraulic components.The hydraulic system is designed on the basis of the action of underwater vertical oil tree.Based on the AMESim software,the model building,parameter setting and system simulation are carried out,and the estimated value of the installation time of the vertical oil tree is obtained,also analyze the synchronization of hydraulic system.The simulation results show that the structure design of the hydraulic cylinder is reasonable,and it can meet the requirements of the work.And has good synchronization.Provide reference for installation and selection of hydraulic system.
underwater;Christmas tree;erecting equipment;hydraulic system;AMESim software
2017-12-03
国家工信部2013年高技术船舶(海洋装备)科研项目(工信部联装[2013]41号)——水下采油树配套工具研发;国家重点研发计划重点专项项目(2016YFC0303700)资助
程友祥(1985-),男,工程师,2008年毕业于哈尔滨工程大学,现从事海洋石油装备研究及管理工作,E-mail:yxcheng@qwop-quip.com。
1001-3482(2017)03-0007-05
TE952
A
10.3969/j.issn.1001-3482.2017.03.002
猜你喜欢
廊坊师范学院学报(自然科学版)(2021年2期)2021-09-10
冶金设备(2020年2期)2020-12-28
重型机械(2020年2期)2020-07-24
设备管理与维修(2018年15期)2018-11-08
设备管理与维修(2018年8期)2018-08-13
中国核电(2017年1期)2017-05-17
石油化工建设(2015年6期)2015-12-01
医学研究杂志(2015年11期)2015-06-10
医学研究杂志(2015年11期)2015-06-10
电测与仪表(2015年15期)2015-04-12
