基于姿态测量模块和闭环检测算法的仿生SLAM研究
2017-06-22 14:05:34凌有铸陈孟元
传感技术学报 2017年6期
许 曈,凌有铸,陈孟元,王 伟
(安徽工程大学,安徽省电气传动与控制重点实验室,安徽 芜湖 241000)
基于姿态测量模块和闭环检测算法的仿生SLAM研究
许 曈,凌有铸*,陈孟元,王 伟
(安徽工程大学,安徽省电气传动与控制重点实验室,安徽 芜湖 241000)
基于传感器模型的SLAM导航策略精度较高,但由于摩擦等因素误差长时间累计会造成里程计的漂移现象。依靠视觉里程计进行导航的RatSLAM系统,通过在局部场景细胞中引入闭环检测策略实现累计误差的校正,在静态环境下具有一定的鲁棒性,但在复杂场景里,如移动障碍物的出现,视觉里程计会提取到错误的速度等姿态信息,导致航迹出现较大偏移,有时无法通过场景重定位进行闭环校正。结合两种模型的优势提出一种带姿态测量模块和闭环检测算法的仿生SLAM模型。实验表明,相较于仅带带闭环检测的RatSLAM系统或仅由姿态测量模块构成的导航系统,本文提出的新系统更能适应长期复杂场景下的导航,且鲁棒性更强。
同步定位与地图构建;仿生导航;闭环检测;姿态测量模块;传感器应用;移动机器人
同步定位和地图构建SLAM(Simultaneous Localization and Mapping)要求移动机器人在一个陌生环境中探索环境、构建地图,并同步运用构建出的地图追踪机器人在该环境中的位置。现有处理移动机器人SLAM问题的传感器包括激光测距仪[1-2]、声呐测距仪、图像传感器[3]、惯性导航设备等。激光测距仪精度高、可靠性好,但强光条件会影响探测器而导致读数的错误;声呐测距仪利用探测器锥形区域最近物体的反射来判断距离的方式决定了其无法准确判断物体的距离;照相机在区分图像色方面表现很差,全景相机采集的图像会产生严重畸变;里程计漂移现象使移动机器人轮子上的里程计无法反映其移动的真实距离等。全球卫星定位系统GPS可以不依赖移动机器人轮子编码器的路径积分实现机器人位置信息的更新,从而实现室外环境下的精准导航。但在无法接收卫星导航信号的室内环境下,仍可以利用不同种类的多个传感器数据进行信息融合消除上述单一传感器采集的错误信息对定位导航的影响[4-6],但仍有其局限性。
动物无需精确完美的传感器便可适应环境并实现自身的定位导航,通过模拟动物的导航行为提供了SLAM问题的另一种解决思路。与基于数学概率的导航算法相比,这类仿生导航策略避免了高精度昂贵传感器和复杂概率算法的使用。澳大利亚昆士兰大学Michael等[7-9]提出一种基于复合位姿表征的啮齿动物海马区扩展模型(RatSLAM),将路径积分和视觉关联过程集成到位姿细胞模型中,使机器人具有更新预测状态的能力,并建立了存储环境空间、视觉、时间、行为和变化等信息的经历制图算法,实验表明[10-13],这种RatSLAM模型能够满足室内静态场景下的导航。
但是,仅依靠视觉的RatSLAM模型并不能适应长时间动态复杂环境下的导航,研究者们将现有的传感器技术应用于鼠类海马模型的导航细胞以改进现有的RatSLAM模型。Berkvens等[14]将地磁定位的理念引入RatSLAM系统,提高定位的精准度,但由于金属、电气设备的干扰,提出的这种地磁RatSLAM并不具备较高的准确性,在文献[15]中,他又提出了一种结合RatSLAM中的视觉图像处理和WI-FI指纹识别的新型传感器融合技术以改进定位策略,并使用指南针传感器修正方位角偏差。通过室内和室外的实验数据表明,构建出这种拓扑地图的准确性远高于使用单一传感器,并在文献[16]中将无源RFID、有源RFID、WI-FI、地磁传感器分别引入多组实验,结果表明将地磁通量引入RatSLAM算法可以明显减少射频技术构建经历图的平均误差,并在很大程度上能够确保不产生错误路径,但实验中仍出现一些问题,包括由于前一时刻定位产生错误而对预期位置的错误判断、经历图的平均误差仍比较大等问题。本文在RatSLAM模型的局部场景细胞中引入闭环检测算法消除导航中的累计误差,同时引入磁力计、加速度计和陀螺仪等多种传感器建立一种新型的航位推算模型,避免在移动障碍物出现时,视觉里程计提取到错误的速度和角度信息,同时准确判断出自身当前方位,进一步增强了导航的稳定性。
1 基于闭环检测算法的RatSLAM模型
提出一种满足室内场景导航的改进型RatSLAM系统,该系统在基于鼠类海马模型的基础上引入融合磁力计、加速度计和陀螺仪的姿态测量模块,通过摄像头对实际场景的采集完成外部视觉感知过程从而形成局部场景;获得的局部场景一方面通过给位姿网络模型注入活性实现定位,另一方面通过联想学习进行地图构建,其中,模型化头方向细胞和位置细胞的竞争性吸引子网络结构所形成的位姿感知细胞群模型通过(x,y,θ)表征估计当前自身位置影响每一个经历的构建;利用移动机器人自身所带的多种传感装置监测其自身的状态并对图像识别中可能出现的误判数据做修正,进而影响经历图的构建,模型如图1所示。

图1 改进型RatSLAM模型
1.1 外部视觉感知
采用笔记本自带的摄像头对当前场景进行感知,通过Hessian矩阵行列式对图像中的像素点进行分析,构造快速鲁棒特征SURF(Speeded Up Robust Feature)的特征点描述算子,其中,每个特征点采用64维向量的描述子进行匹配。
1.2 闭环检测下的RatSLAM模型
①获取局部场景信息
在现有RatSLAM模型基础上采用基于词袋模型的闭环检测算法,先利用SURF算法进行特征提取生成视觉单词构建视觉词典树,再通过贝叶斯滤波后验概率估计进行闭环获取,从而进行场景重定位。局部场景细胞感知的视觉模板集合V如式(1)所示:
V={V1,V2,…,Vn}
(1)
式中:Vi(1≤i≤n)表示局部场景细胞的活动水平。
②位姿网络内部活动
位姿网络的内部活动通过吸引子竞争网络的动力学模型控制,由于突触的兴奋传导使位姿感知细胞活动产生的变化如式(2)所示:
(2)
式中:a、b、c为x′、y′、z′的分布系数;Nx′,Ny′,Nz′为(x′,y′,z′)空间中的位姿感知细胞三维矩阵元素。利用墨西哥帽函数(mexh,Mexican Hat)计算位姿细胞神经元间的突触权重ψ(dx′,dy′,dz′),表达式如式(3)所示。
(3)
式中:
dx′=min(Nx′-|x′-a|,|x′-a|)
dy′=min(Ny′-|y′-b|,|y′-b|)
dz′=min(Nz′-|z′-c|,|z′-c|)
(4)
③关联局部场景与位姿感知

(5)
位姿感知细胞活动的变化ΔPx′,y′,z′,如式(6)所示。
(6)
为保持位姿细胞在获得视觉输入和路径积分输入后的总活性,需对其活跃性进行归一化。表达式如(7)式所示。
(7)
④经历图构建
一个经历能级Ex′y′z′的各组成要素由当前位姿感知细胞的活性与决定,每一个经历e通过关联经历能级Ex′y′z′、局部场景细胞活动水平V和位姿细胞Px′y′z′活动,第i个经历如式(8)所示。
ei={Eix′y′z′,Pix′y′z′,Vi}
(8)
闭环改进后的RatSLAM模型如图2所示,其中,经历i编码时进行一次闭环检测校准。

图2 基于闭环检测校准的RatSLAM模型
1.3 姿态测量模块
对于室内导航,当出现移动障碍物时,如人的走动等,基于视觉的RatSLAM导航系统无法提取到准确的速度和角度信息,因而导致视觉里程计导航性能下降,本文引入磁力计、加速度计和陀螺仪等传感器建立航位推算模型纠正其视觉导航的错误记录并增强系统的鲁棒性。
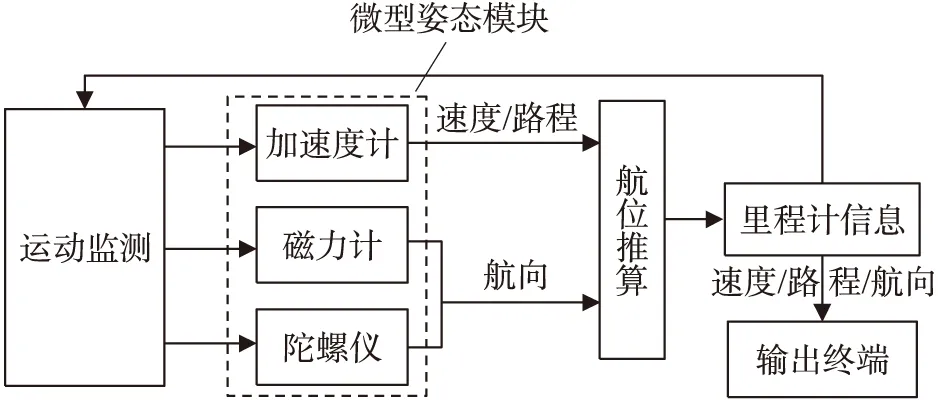
图3 姿态测量模块检测流程图
①传感器校准
静态条件下传感器会受到重力和地球自转速率影响,通过实验校准加速度计、磁力计、陀螺仪补偿其测量值,转换公式由(9)式表达。
(9)
式中:δ和δ′分别为转换前后的传感器误差;ρ为弧度与秒的转换常量;g为重力加速度;vearth为地球自转速率;H为当前位置的磁场强度。
②坐标系变换
在此建立载体坐标系向导航坐标系的姿态转换矩阵。选北东天地理坐标系作为载体导航坐标系,导航坐标系向载体坐标系转换关系如式(10)所示。

(10)
(11)
式中:φ为滚动角,θ为俯仰角,ψ为航向角,ab=[axayaz]T和Mb=[MxMyMz]T分别表示加速度计测得重力加速度和磁场强度在载体坐标系三轴投影分量。
③姿态更新
四元数法计算量小,算法简单,可适用于低动态载体姿态解算,这里选取此方式进行姿态更新,其微分方程表达式如式(12)所示。

(12)


(13)
式中:

(14)

图5 实验场景
2 实验与分析
①实验设计
本实验采用笔记本自带摄像头进行场景采集,将其搭载在实验室移动机器人平台旅行者二号上进行数据采集,传感器采用姿态测量模块,该模块包含陀螺仪、加速度计与磁力计。实验场景选取9 m×6 m的室内环境。图4为移动机器人实验平台,将摄像头采集的图像信息与姿态测量模块采集的数据信息传输至上位机并进行MATLAB仿真实验。图5为实验的真实环境。

图4 实验平台
②实验结果分析
视觉里程计提取的速度信息与加速度计测得的速度信息如图6所示,在43 s~51 s间由于人运动的干扰,视觉里程计无法对移动机器人实时速度准确判别,此时必须通过加速度计获取的数据进行替代。
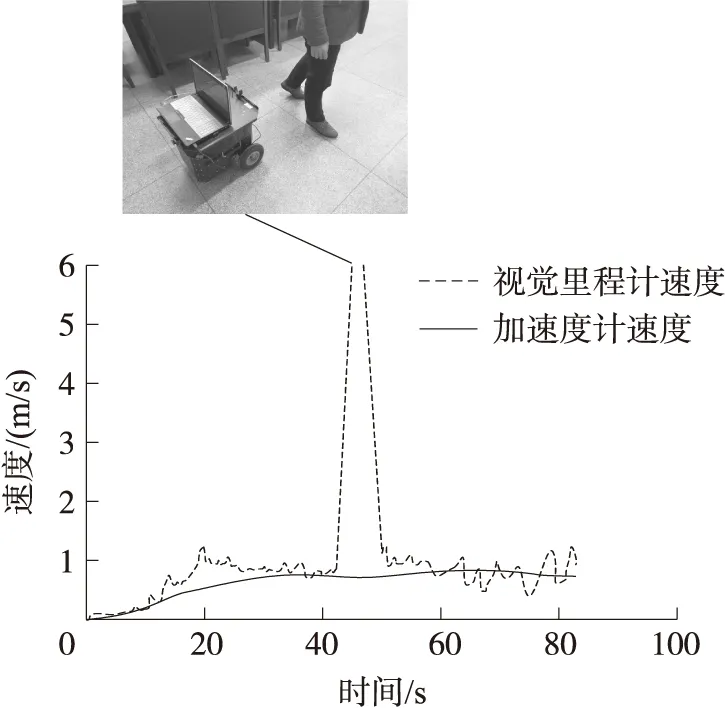
图6 视觉里程计速度与加速度计测得数据对照
注入闭环检测的局部场景细胞学习到的场景与其匹配效果如图7所示,可以看出,在47 s左右移动机器人走完场景一圈,定位到初始时刻位置,并正确匹配到一次闭环,受环境影响节点匹配时可能出现错误闭环和闭环未检测到的情况。

图7 带闭环检测算法的经验节点匹配效果图

图8 三种算法的经历图
绘制的经历图如图8所示,现有的RatSLAM算法会由于里程计漂移等因素影响无法胜任复杂环境下的导航;带闭环检测的RatSLAM系统通过经验节点的匹配能够一定程度上降低误差,但由于一些关键帧未检测到闭环,如图中带闭环检测的RatSLAM算法所示虚线,当移动机器人第三次初始位置时闭环检测未能及时匹配到而造成经历图偏离轨迹;采用带姿态测量模块和闭环检测算法的RatSLAM模型能够直接从移动机器人本身获取数据避免了由于移动障碍物的突然出现导致视觉里程计在一段时间中提取出错误的姿态信息而降低经历制图的准确性。实验表明本文提出的带姿态测量模块和闭环检测算法的RatSLAM模型稳定性更好,适应性更强。
3 结论
本文提出的带姿态测量模块和闭环检测算法的RatSLAM模型,通过闭环检测改进现有RatSLAM仿生算法下由于摩擦等误差累计造成的里程计漂移现象,通过引入姿态测量模块避免了突发障碍物的出现对视觉里程计提取速度等姿态信息的干扰。结合传感器技术和仿生原理解决SLAM问题仍值得进一步研究。
[1] 辛煜,梁华为,梅涛,等. 基于激光传感器的无人驾驶汽车动态障碍物检测及表示方法[J]. 机器人,2014(6):654-661.
[2] 李琳,林炳强,邹焱飚. 基于条纹式激光传感器的机器人焊缝跟踪系统研究[J]. 中国激光,2015(5):34-41.
[3] 李晓晨,姚素英,黄碧珍,等. 一种应用于高动态范围CMOS图像传感器的曝光控制技术[J]. 传感技术学报,2013,26(3):328-332.
[4] 张学习,杨宜民. 基于多传感器信息融合的移动机器人快速精确自定位[J]. 控制理论与应用,2011,28(3):443-448.
[5] 汪剑鸣,王曦,王胜蓓,等. 室内惯性/视觉组合导航地面图像分割算法[J]. 中国惯性技术学报,2011,19(5):553-558.
[6] 宋镖,程磊,周明达,等. 基于惯导辅助地磁的手机室内定位系统设计[J]. 传感技术学报,2015,28(8):1249-1254.
[7] Milford M J,Prasser D P,Wyeth G F. Effect of Representation Size and Visual Ambiguity on RatSLAM System Performance[C]//Australasian Conference on Robotics and Automation. Australian Robotics and Automation Society(ARAA),2006:1-8.
[8] Milford M,Schulz R,Prasser D,et al. Learning Spatial Concepts from RatSLAM Representations[J]. Robotics and Autonomous Systems,2007,55(5):403-410.
[9] Milford M,Wyeth G,Prasser D. RatSLAM on the Edge:Revealing a Coherent Representation from an Overloaded Rat Brain[C]//Ieee/rsj International Conference on Intelligent Robots and Systems,IROS 2006,2006:4060-4065.
[10] Milford M J,Wyeth G F,Prasser D. RatSLAM:a Hippocampal Model for Simultaneous Localization and Mapping[C]//IEEE International Conference on Robotics and Automation.IEEE,2004:403-408.
[11] Galluppi F,Conradt J,Stewart T,et al. Live Demo:Spiking ratSLAM:Rat Hippocampus Cells in Spiking Neural Hardware[C]//Biomedical Circuits and Systems Conference. IEEE,2012:91-91.
[12] Prasser D P,Wyeth G F,Milford M J. Experiments in Outdoor Operation of RatSLAM[C]//The 2004 Australasian Conference on Robotics and Automation(ACRA2004). Australian Robotics and Automation Association,2004:1-6.
[13] Prasser D,Milford M,Wyeth G. Outdoor Simultaneous Localisation and Mapping Using RatSLAM[J]. Springer Tracts in Advanced Robotics,2006,25(1):143-154.
[14] Berkvens R,Vercauteren C,Peremans H,et al. Feasibility of Geomagnetic Localization and Geomagnetic RatSLAM[J]. International Journal on Advances in Systems and Measurements,2014,7(1):44-56.
[15] Berkvens R,Jacobson A,Milford M,et al. Biologically Inspired SLAM Using Wi-Fi[C]//Ieee/rsj International Conference on Intelligent Robots and Systems. IEEE,2014:1804-1811.
[16] Berkvens R,Weyn M,Peremans H. Asynchronous,Electromagnetic Sensor Fusion in RatSLAM[C]//Sensors. IEEE,2015:1-4.
Bio-Inspired SLAM Based on Gesture Measuring and Closed-Loop Detection
XU Tong,LING Youzhu*,CHEN Mengyuan,WANG Wei
(Key Laboratory of Electric Drive and Control,Anhui Polytechnic University,Wuhu Anhui 241000,China)
There has a relatively high accuracy on sensors in the Simultaneous Localization and Mapping(SLAM)problem,but odometer drift appears on account of accumulative errors for a long time,and this kind of accumulated error can be corrected by adding closed-loop detection to the local view cells,which is based on visual odometry of RatSLAM system,and this system has a good performance on robustness under the circumstance of static environment. However,speed acquired from the visual odometry is incorrect in complex scenarios such as moving obstacles,which leads to large deviation during navigation,and sometimes this model is unable to relocate the surroundings and correct trajectory. Combined with the two algorithms above,bio-inspired SLAM based on gesture measuring and closed-loop detection is presented,and experiments show that in contrast to the RatSLAM system with only closed-loop detection or the system with only gesture measuring model,the new system proposed in this paper adapts to the navigation in a long time and has fairly better robustness.
simultaneous localization and mapping;bio-inspired navigation;closed-loop detection;gesture measuring model;sensor applications;mobile robots

许 曈(1993-),男,安徽工程大学在读研究生。目前主要研究方向为机器视觉和仿生导航算法等,928087776@qq.com;

凌有铸(1962-),男,毕业于哈尔滨工业大学,现任安徽工程大学教授。主要研究方向为传感器信号处理和机器人地图构建等,lyz7985@163.com;

陈孟元(1984-),男,安徽工程大学副教授,中国科学技术大学在读博士。目前主要研究方向为传感器信息融合及优化等,mychen@aphu.edu.cn。
项目来源:2016年安徽高校自然科学研究项目(KJ2016A794);2016安徽工程大学研究生实践与创新基金项目(Y040116004)
2017-02-20 修改日期:2017-04-07
TP242.6;Q811.211;TP751
A
1004-1699(2017)06-0916-06
C:7230M;7230G;7310
10.3969/j.issn.1004-1699.2017.06.019
猜你喜欢
导航定位学报(2022年5期)2022-10-13 09:11:28
北京航空航天大学学报(2022年6期)2022-07-02 01:59:12
中国惯性技术学报(2019年1期)2019-05-21 00:58:30
传感器与微系统(2018年7期)2018-08-29 00:44:28
制造技术与机床(2017年3期)2017-06-23 08:11:21
黑龙江电力(2017年1期)2017-05-17 04:25:05
环境科技(2016年5期)2016-11-10 02:42:12
导航定位与授时(2016年6期)2016-03-16 09:31:31
系统工程学报(2015年2期)2015-02-28 19:53:43
电网与清洁能源(2015年2期)2015-02-28 16:03:12