任务驱动的一体化作战指挥信息系统高效协同技术
2017-06-19 19:17董龙明高天成邱瑞波马连淼
火力与指挥控制 2017年5期
董龙明,高天成,邱瑞波,马连淼
(1.南京大学计算机科学与技术系博士后流动站,南京 210000;2.北方信息控制集团有限公司博士后工作站,南京 210000;3.陆军驻南京地区军事代表室,南京 210000;4.北方信息控制集团有限公司,南京 210000)
任务驱动的一体化作战指挥信息系统高效协同技术
董龙明1,2,3,高天成4,邱瑞波3,马连淼3
(1.南京大学计算机科学与技术系博士后流动站,南京 210000;2.北方信息控制集团有限公司博士后工作站,南京 210000;3.陆军驻南京地区军事代表室,南京 210000;4.北方信息控制集团有限公司,南京 210000)
针对一体化网络中心战下各参与方作战指挥信息系统的异构性、自治性、多样性等特点给联合协同作战带来的问题,提出了任务驱动的一体化作战指挥信息系统高效协同技术。以作战目标为导向将各作战力量和资源按需聚合和自主协同,引入自主个体、虚拟任务共同体和虚拟任务执行体,构建一体化虚拟作战指挥环境,为各作战单位提供高效、协同、透明的一体化服务。分别从核心元素、系统框架分别介绍高效协同体系结构,结合陆军合成营指挥信息系统案例对高效协同技术各组成部分进行深入分析,验证该技术的可行性。
一体化作战指挥信息系统,任务驱动,协同,自主个体
0 引言
随着计算机技术和网络技术在作战指挥的深度应用,作战模式从以“武器平台”为中心向以“网络”为中心转变,综合电子信息系统C4ISR[1-2]是获取战场信息优势的关键,将陆、海、空、天及电磁空间的各作战力量通过信息有效地聚合成一个有机的整体,成为战斗力的“倍增器”。但是,由于缺乏统一的数据模型和体系架构,包括各种传感器、情报侦查系统、预警探测系统、指挥控制系统、武器平台系统组成的综合电子系统结构复杂、分布异域,各系统之间虽然能够实现互联互通,但是,有机地融合在一起实现互操作仍存在着信息壁垒,资源利用率不高,这严重阻碍着指挥信息系统在一体化作战中作为中心地位性能高效的发挥。
联合一体化作战下,其作战方式呈现作战力量多元化、作战编组临时化、指挥手段一体化和指挥体制扁平化等特点[3],由于作战力量来源不同,各军兵种作战子系统,如:传感网感知系统、指挥控制系统、火力打击系统、信息网络系统和支援保障系统,其系统体系架构、运行环境、数据语义模型存在较大差异,系统时钟同步、时序控制、数据互操作等方面很难同步,这给各系统有机集成协同指挥控制作战全过程带来了困难。但是,参与某个作战过程的各C4ISR子系统不是简单地聚合在一起,而是为完成某个作战任务或作战目标而聚合一起的,并且在作战过程中扮演的作战任务或角色是已知的,这为C4ISR各子系统信息集成能够有效地协同工作完成作战任务带来可能。
针对一体化作战指挥信息系统,国内外进行了一系列卓有成效的研究,并建立了一整套系统理论和方法。美军相继制定了《联合技术系统结构》[4]、《C4ISR体系结构框架》[5]和面向服务体系的体系架构DODAF1.0[6],用来指导美军各军兵种构建一体化、互操作性、高效的面向网络中心战的C4ISR系统的开发。C4ISR系统建模相关研究主要包括:面向过程的建模(例如:基于结构化分析的方法IDEF[7])与面向对象的建模(如:基于统一建模语言UML方法[8]),促进系统设计人员、军事专家、系统用户等多种人员的交流与沟通,指导C4ISR系统的整个设计开发过程。近几年,将具有自治性、社会能力、响应性和能动性的Agent智能体引入C4ISR系统部件或分系统开发,通过多个Agent之间的交互描述系统的宏观协同架构[9]。但是,C4ISR系统协同技术研究比较少,尤其在新的作战样式网络中心战条件下面向开发网络环境各C4ISR系统的协同技术面临新的问题和条件,如何有效协同直接影响着基于C4ISR系统指挥作战的效能发挥。本文提出了以任务驱动的按需聚合和自主协同为核心机制的一体化作战指挥信息系统高效协同技术,分别从核心元素和系统框架进行描述。
1 高效协同体系结构
当前,一体化C4ISR作战指挥信息系统构建一般有两种途径:一是在已有的信息系统基础上进行技术改造,构造新的数据适配器或网络交互协议以适应不同异质信息系统间的交互;二是定义一整套具有全局视图和语义基础的体系架构,各C4ISR子系统的开发必须遵循该架构以达成各子系统间的协同。第1种方法已经被实践验证不可取,尤其在构建开放网络环境下动态多变的异构系统间的信息交互和协同工作,不仅各种数据适配器或网络交互协议随着异构系统数量增长而指数增长,而且效率低下。
为实现网络中心站下各作战资源的有效共享和综合利用,必须具有一套以作战资源的按需聚合与自主协同为核心的高效协同技术以指导各作战资源扮演好协同角色完成各自作战任务。
1.1 核心元素
聚合是指有效获取、汇聚、组织各方作战资源,并综合利用相关信息的过程;协同是指多个作战资源为完成共同作战目标或任务进行的交互、同步和计算的过程。
1.1.1 自主个体
自主个体是网络中心战中的基本作战单位,是具有自主行为能力的资源和信息管理者。从内部结构上看,自主个体由感知部件、动作驱动引擎和执行部件构成,如图1所示。感知部件作为自主个体提供对网络环境和所管理资源的感知能力,获取自主个体所驻留作战环境的变化以及所管理资源的运行状态(如存储空间变化、计算资源的负荷变化等);动作驱动引擎是根据感知部件获得的环境和资源信息进行汇总,根据自身任务、知识结构和运行状态作出相应的动作决策;动作的具体实施由执行部件完成,其结果不仅影响外部环境,同时对自身状态产生影响。感知部件、动作驱动引擎和执行部件共同构成自主个体的控制环路。动作驱动引擎的动作决策由数据模型和业务流程决定:数据模型表示自主个体对自身能力和外部作战环境的认识;业务流程则表示自主个体可能的行为决策,尤其在面临多项选择需要作出决策时应该选择哪种方案,需要对感知信息和对环境认识并结合自身经验,进行推理和选择,产生行为决策。
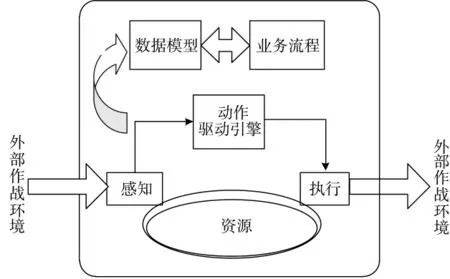
图1 自主个体内部结构示意图
自主个体可以用来对各种作战资源和指挥信息系统进行抽象和封装,将零散、异质的作战资源转换为自主、动态的自主个体,能够有效屏蔽作战资源多样性和异质性的特点,使之能够对外提供透明一致的信息服务。一个自主个体可以对多个作战资源进行抽象和封装,并被赋予战场动态感知、自主行为决策和协同等能力;自主个体可以进行相互组合,复合自主个体可以通过其他原子自主个体进行组合得到。自主个体对外提供支持按需聚合的元信息:协同过程中能扮演的角色、数据模型、交互协议。
根据内部控制复杂程度,自主个体可以分为两种类型:一类是只具有简单反应式的自主个体,根据外部请求进行反应式的动作,例如:各种战场情报探测系统,对外提供战场态势的信息;另一类自主个体,其内部维护一定的知识和状态信息,通过建模、分析和推理等机制实现对外部战场的感知、分析及行为决策,例如:各种战斗单元,坦克分队、防空分队、火炮分队、维修分队等,能够根据外部请求和战场态势作出合理的自主行为。与反应时自主个体不同,后一类自主个体由于具有更多的自主化和智能化特征,是支撑战场自主协同的主要软件单元。
1.1.2 虚拟任务共同体
一体化作战指挥过程中,各作战资源通过共同的作战任务而动态聚合在一起。所谓虚拟任务共同体是指一组具有共同兴趣、遵守共同准则的自主个体构成的集合。在虚拟任务共同体内部,各个自主个体根据所承担的任务扮演着不同角色:有的自主个体为战场态势的提供者、有的为作战行动执行者、有的为战场后勤保障者。虽然角色分工不同,但是同一虚拟任务共同体内部的自主个体所关注的战场态势视图都是确定和一致的,都是围绕战场态势的动态改变和各自承担使命而发挥不同的作用。一个自主个体也有可能属于多个虚拟任务共同体,例如:一个气象雷达站可能同时为多个作战任务提供气象信息。
为了支持任务的完成,虚拟任务共同体需要提供一定的战场资源元信息管理中心,以及信息发布和发现机制。资源聚合是根据任务需要,按照资源元信息的管理方式进行的。虚拟共同体的范围和组成关系如图2所示。网络中心战包含多个不同的虚拟共同体,每个虚拟共同体仅仅关注与某个特定作战任务的作战资源共享应用,每个自主个体至少需要加入一个虚拟任务共同体,并在虚拟任务共同体的元信息管理设施中进行注册。虚拟任务共同体是动态管理的,自主个体可以根据实际任务情况,随时加入或退出某个虚拟任务共同体。
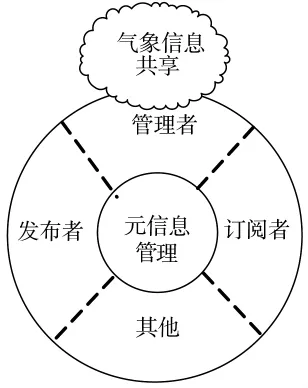
图2 虚拟任务共同体示意图
1.1.3 虚拟任务执行体
在一体化作战指挥过程中,需要根据任务选择和请求自主个体的服务,实现自主个体与作战任务的动态绑定:一个任务可能需要多个自主个体提供服务,而单个自主个体也可能同时为多个作战任务服务。
虚拟任务执行体是指协同同时承担同一任务的相关自主个体,为完成该任务而形成的状态空间总和。虚拟任务执行体是对作战资源协同过程的抽象,是作战指挥信息系统运行管理单位。虚拟任务执行体是与某一任务紧密相连的,通过虚拟任务执行体可以获得面向该任务的所有自主个体及其交互状态等监控信息。
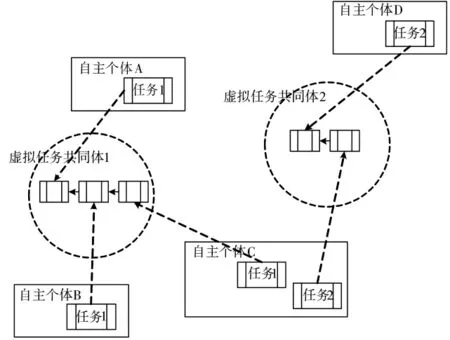
图3 虚拟任务执行体示意图
虚拟任务执行体与自主个体的关系如图3所示。虚拟任务执行体通过作战任务动态绑定一组自主个体,并通过自主个体的协同来完成相应的任务。自主个体与任务是面向任务目标进行按需聚合和动态绑定进行自主协同。一体化作战指挥信息系统需要提供一系列的基础管理服务实现虚拟任务执行体的创建和执行等管理,并根据任务运行情况完成各种状态的监控和转换。
1.2 系统框架
基于上述3个核心元素,任务驱动高效协同的一体化作战指挥信息系统系统框架可以分为4层,如图4所示。
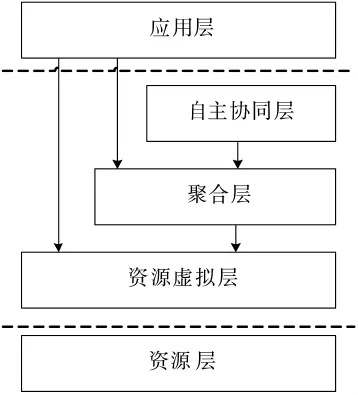
图4 任务驱动高效协同的一体化作战指挥信息系统系统框架
1.2.1 资源层
资源层由各种异构和多样作战资源组成,这些资源不仅包括各种侦查设备、武器平台、指挥车、装备维修抢救车等硬件平台,还包括军事地理信息系统、指挥辅助决策系统、各种数据管理系统、网络服务等软件平台和资源,一体化作战指挥信息系统能够支持资源接入作战网络环境中,并能够互连互通有效共享和协同。
1.2.2 资源虚拟层
资源虚拟层包括自主个体创建和管理的一组基础服务,将各种软件和硬件资源通过抽象封装成自主个体。该层涉及到的功能包括:基础资源的虚拟化、异构系统数据模型的一致性描述和建模技术、自主元素的内部状态转换、外部环境的感知、行动决策方案、通信协议、访问接口和交互协议等。
1.2.3 聚合层
聚合层是根据任务需求提供创建与管理虚拟任务共同体的一组服务,按照任务需求对自主个体进行聚合。该层涉及到的功能包括:自主个体数据模型提取和描述、自主个体元信息注册发布定位技术、自主个体搜索匹配技术等。
1.2.4 自主协同层
自主协同层是提供根据任务目标生成虚拟执行体的一组服务,通过虚拟执行体绑定相关的自主个体,通过自主协同完成任务目标。该层涉及的功能包括:事务管理、协同机制和服务组合和调用等。
1.2.5 应用层
应用层面向作战各级指挥员、操作员、系统管理员,提供各种作战相关和网络系统管理应用功能。
2 案例分析
以网络化合成战术部队作战指挥信息系统为例,说明任务驱动的一体化作战指挥信息系统高效协同技术体系结构及核心机制的内涵,并验证该技术的有效性。
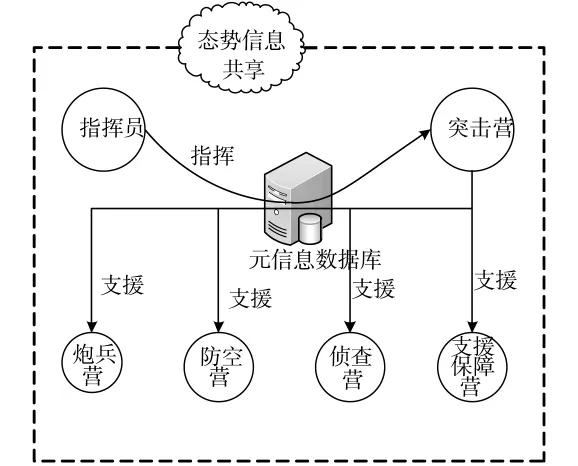
图5 作战任务遂行共同体结构示意图
网络化合成战术部队是探索多兵种灵活编组、联合作战、模块化合成的新型陆军编成方案,其基本思想是:将装甲突击、陆军航空兵、炮兵火力支援、防空防化兵、工兵保障力量等兵种以营级单位进行编组,以网络化信息系统为核心,将多种兵种有效合成为一个能够遂行多种作战任务的高效快速反应部队。
可以通过自主个体将异构的作战力量封装成统一的实体,并通过调用和返回服务统一接口协议屏蔽这些作战力量武器平台的异构性。可以根据任务的性质和特点创建各种任务虚拟共同体,将有效完成该任务的作战自主个体纳入该任务虚拟共同体,如图5所示,该图为一次突击任务虚拟共同体。使用元信息数据库完成资源元信息的发布、发现和组织功能,所有作战力量已经抽象为自主个体,例如:指挥员、突击营、炮兵营、防空营、侦查营和支援保障营,这些自主个体的能力描述、位置信息和通信协作协议在元信息数据库中描述。
任务自主遂行执行体是指在实际任务执行过程中,各自主个体针对该任务目标、战场态势和自主个体工作流机制,实时自主作出决策调用其他自主个体协同,消灭潜在威胁目标保证自身安全,并出色完成作战任务。下页图6描述了在一次突击任务过程中,突击营针对战场态势多变,合理调用其他作战力量并完成作战任务的自主遂行协同过程示意图。
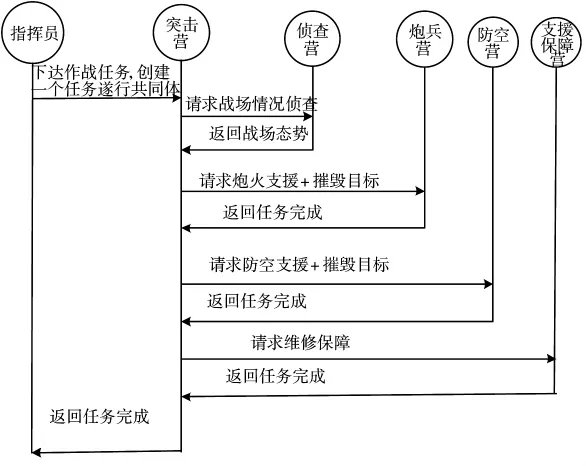
图6 任务自主遂行协同过程示意图
3 结论
随着新一轮军改的不断深入,多军兵种联合作战成为部队训练、演习和承担作战任务的新常态,各参与方作战指挥信息系统之间的互联互通和信息高效利用成为任务成败的关键。本文提出了网络中心战下任务驱动的一体化作战指挥信息系统高效协同技术,引入自主个体、虚拟任务共同体、虚拟任务执行体3个概念,从系统框架介绍了协同体系架构。一体化作战指挥信息系统的数据一致模型和协作通信协议是下一步工作重点和研究的方向。
[1]王东霞,赵刚.美军信息系统体系结构相关研究综述[J].军事运筹与系统工程,2003,17(4):56-61.
[2]黄力,罗爱民,邱涤珊,等.C4ISR系统框架研究进展[J].火力与指挥控制,2004,29(3):16-19.
[3]程永生,军事高技术与信息化武器装备[M].北京:国防工业出版社,2009.
[4]BIENVENU M P,SHIM I,LEVIS A H.C4ISR architecture III:an object-oriented approach to architecture design[J]. Systems Engineering,2000,3(4):288-312.
[5]DoD Architecture Framework Working Group.DoD Architecture Framework(Volume II):Product Description Version 1.0,2004.
[6]DoD Architecture Framework Working Group.DoD Architecture Framework(Volume III):Architecture Data Description 1.5,2007.
[7]WAGENHALS L W,SHIN I,KIM D,et al.C4ISR architecture:II.a structured analysis approach for architecture design[J].Systems Engineering,2000,3(4):248-287.
[8]BIENVENU M P,SHIN I,LEVIS A H.C4ISR architecture:II.an object-oriented approach for architecture design[J]. Systems Engineering,2000,3(4):288-312.
[9]侯锋,陈洪辉,罗雪山.基于多Agent的C4ISR系统建模与仿真方法研究[J].光电技术应用,2004,19(3):25-30.
Efficient Cooperation Technology of Task-Driven for Joint Operation and Command Information Systems
DONG Long-ming1,2,3,GAO Tian-cheng4,QIU Rui-bo3,MA Lian-miao3
(1.Post-doctoral Research Station,Department of Computer Science and Technology,Nanjing University,Nanjing 210000,China;2.Post-doctoral Workstation,Northern Information Control Group Ltd.,Nanjing 210000,China;3.Nanjing Military Representative Office of PLA Army,Nanjing 210000,China;4.Northern Information Control Group Ltd.,Nanjing 210000,China)
The operation and command information systems involved in the integrated networkcentric warfare are heterogeneous,autonomous,and diverse,which brings many problems to the joint and cooperation operations.This paper presents a task-driven efficient cooperation technology for joint operation and command information systems.Various combat forces and resources are aggregated in demand and cooperate with each other oriented by the goal of the combat.Individual autonomy,virtual task commonwealth,and virtual task executor are introduced to build the joint virtual battle and command environment.The efficient,collaborative,and transparent integrated services are provided for all the combat units in the environment.The efficient cooperation architecture is introduced respectively from the core elements and the system framework.In the end,combined with the command information systems of the synthetic army camp,each component of the efficient cooperation is analyzed deeply to verify the feasibility of our technology.
Joint operation and command information systems,task-driven,cooperation,individual autonomy
TP391
A
1002-0640(2017)05-0079-05
2016-03-15
2016-05-27
董龙明(1982- ),男,江苏建湖人,博士,工程师。研究方向为:指挥信息系统,软件可靠性等。
猜你喜欢
英美文学研究论丛(2022年1期)2022-10-26
散文诗(青年版)(2022年5期)2022-05-31
哈尔滨轴承(2022年1期)2022-05-23
甘肃教育(2020年17期)2020-10-28
英美文学研究论丛(2020年2期)2020-02-06
劳动保护(2019年7期)2019-08-27
福建基础教育研究(2019年11期)2019-05-28
电子制作(2018年11期)2018-08-04
消费导刊(2017年20期)2018-01-03
现代计算机(2016年11期)2016-02-28