
一种新型3-PRP并联机器人的运动学分析与仿真
2017-06-15 18:20于振中
河北工业科技 2017年3期
于振中,孙 强,宁 金
(江南大学轻工过程先进控制教育部重点实验室,江苏无锡 214122)
一种新型3-PRP并联机器人的运动学分析与仿真
于振中,孙 强,宁 金
(江南大学轻工过程先进控制教育部重点实验室,江苏无锡 214122)
针对传统三自由度并联机器人结构分析困难的问题,通过对传统并联机器人结构与性能的分析,提出一种新型3-PRP并联机器人。为有效地降低机器人结构分析的难度,采用直线模组构成2个对称移动副,配合1个转动副,代替传统三自由度并联机器人的3个转动副,并根据该新型机器人的结构特点,建立了运动学模型;应用空间解析几何和向量代数法,推导出机器人的运动学正解与逆解方程;应用MATLAB仿真软件编程验证运动学正解与逆解的正确性,确立机器人的工作空间。仿真结果表明,该机器人具有工作空间大、运动学模型精度高、制造成本低等特点,具有广泛的工业应用前景。
机器人控制;3-PRP;并联机器人;运动学模型;仿真;工作空间
传统工业机器人分为串联和并联两种。与串联机器人相比,并联机器人具有承载能力强、刚度大、机构紧凑、精度高、动力性能好、自重负荷比小等特点[1-3],因此被广泛应用于电子、食品、医药等领域[4]。在实际工业生产应用中,机器人往往不需要6个自由度就能完成任务,如生产线上对产品的分拣、抓取和包装等重复性高的操作。因此,少自由度并联机器人逐渐成为研究热点[5-7],主要包括三自由度并联机器人[8-10]、四自由度并联机器人[11-13]以及五自由度并联机器人[14-16]。特别是对三自由度并联机器人,许多学者提出各种想法。如文献[8]将雅克比矩阵条件数与单轴最大输出扭矩作为机构性能衡量指标,得到典型Delta并联机器人的最优尺寸参数;文献[9]从动平台获得最大姿态角度出发,通过ADAMS平台建立3-PRS并联机器人的参数模型,获得该并联机器人的合理结构参数;文献[10]以压力角和可达工作空间作为约束条件,最大限度减小新型三自由度并联机器人尺寸参数对机构性能的影响。
综上所述,目前对于三自由度并联机器人的研究取得了一些成果,但是主要体现在结构参数与性能优化等方面,并未解决传统三自由度并联机器人结构分析困难的问题。针对这一问题,以传统三自由度并联机器人为基础提出了新型3-PRP并联机器人。相对于传统三自由度并联机器人,该新型机器人运动副由2个对称移动副和1个转动副组成,移动副由直线模组构成,简化了结构,方便进行分析。通过分析其结构特征,建立运动学模型,应用MATLAB软件编程[17-18]验证其运动学模型的正确性,同时仿真出工作空间,为设计者提供理论基础。
1 运动学分析
1.1 机构描述
新型3-PRP并联机器人的结构如图1所示,由静平台、旋转驱动机构、第一直线驱动机构、第二直线驱动机构、十字万向联轴器、动平台和末端执行机构组成。
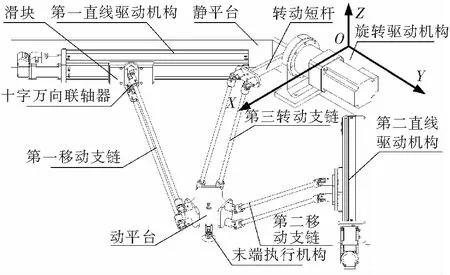
图1 3-PRP并联机器人结构简图Fig.1 Structure diagram of 3-PRP parallel robot
旋转驱动机构由驱动电机和减速机组成,驱动转动短杆。转动短杆通过十字万向联轴器与第三转动支链相连接,构成转动副,以此驱动动平台在Z轴方向运动。第一直线驱动机构由驱动电机和直线模组组成,代替传统并联机器人电机与减速机的结构配置,降低制造成本。直线模组上的滑块与第一移动支链以十字万向联轴器相连接,构成移动副,保证动平台在X轴或Y轴方向的运动。第二直线驱动机构与第一直线驱动机构相呼应,其结构组成与第一直线驱动机构相同,使动平台具有Y轴或X轴方向运动的功能。旋转驱动机构、第一直线驱动机构、第二直线驱动机构都固定于静平台上。静平台以转动短杆为中心,整体呈对称状。静平台固定直线驱动机构的两侧延长线互相垂直。
为了保证动平台在空间灵活运动,3个运动支链通过十字万向联轴器分别与动平台相连接。十字万向联轴器具有结构简单、传动效率高的优点,当主动轴运动时,从动轴既可随之运动,又可绕万向联轴器的十字中心在任意方向转动,使得机器人能够同时适应角度和距离的变化。末端执行机构安装在动平台的中心,采用气动方式跟随动平台动作,对空间内目标物体进行抓取。
相对于传统三自由度并联机器人,新型3-PRP并联机器人的结构优点在于:1)两侧对称引入直线模组构成移动副,由于直线模组具有重复定位精度高、本体质量轻、占地空间小等优点,机器人运行精度得到提高,降低了制造成本;2)2个移动副与1个转动副配合,取代传统3个转动副带动动平台动作,在保留传统并联机器人固有优点的同时,简化结构,降低开发难度;3)3个运动副配合十字万向联轴器驱动动平台在确定的空间范围内灵活运动,使得机器人适应角度与距离的同时变化,获得空间上的位移,以此提高工作空间。
传统三自由度并联机器人结构上呈倒三角形,而3-PRP并联机器人结构类似于“蜘蛛型”,采用并联结构,运动速度快,同时两侧对称直线模组的引入降低了结构分析的难度,为后续运动学分析提供了便利,间接减小了控制成本与难度。
1.2 运动学分析
1.2.1 参考坐标系建立
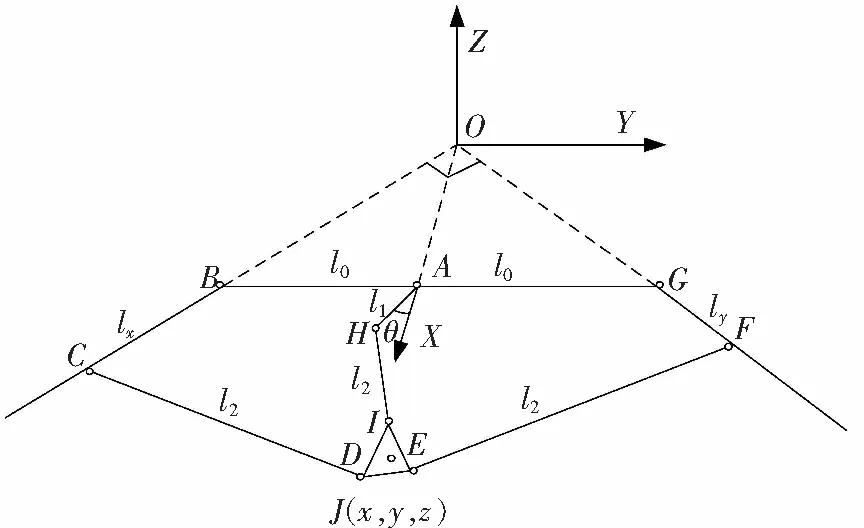
图2 3-PRP并联机器人支链简图Fig.2 Simplified scheme of branches of 3-PRP parallel robot
为了便于运动学分析,对机器人结构进行了简化,图2是新型3-PRP并联机器人支链简图。全局坐标系O-XYZ位于静平台两侧延长线交点O处,Z轴垂直于平面BOG竖直向上,Y轴指向与静平台BG平行,X轴指向过静平台BG中心点A,坐标系遵守右手定则。静平台BG长度为2l0。转动短杆、第三转动支链杆长分别为l1,l2。直线模组位移分别为lx,ly,θ为转动角。由于转动短杆运动范围的限制,逆解分析时对转动角度取值进行限制,使-90°<θ≤90°,以起到防撞保护。
1.2.2 运动学正解分析
求并联机器人的运动学正解是已知各输入节点的位置参数求取动平台位置参数的过程。通过空间解析几何对图2进行分析,可解出C,D2点坐标,其坐标分别为
(1)

(2)
式中:r为动平台中心J至各运动支链与动平台连接处的距离;h代表转动短杆装配高度。由式(2)中任意两式相减,得出:
(3)
解得:
(4)
通过x来表示y与z,为进一步求解提供便利。将式(4)代入到式(2)中,解得:
(5)
再将式(5)代入式(4)中,最终得到运动学正解方程:
(6)


通过分析几何结构,由先验知识可确定z<0为真解。最终确定x,y的真解。
1.2.3 运动学逆解分析
求并联机器人的运动学逆解是已知动平台位置参数求解各输入节点位置参数的过程。通过对式(2)中各方程式分析可知,lx,ly,θ所在式都是一一对应的一元二次方程。已知l0,l1,l2,J(x,y,z),由式(2)解得:
(7)
由于直线模组的位移是大于0的常量,因此对lx,ly取值为大于0的数。θ取其中较小者。由此确定真解。
2 仿 真
2.1 运动学验证算例
设置机器人结构参数:l0=137.5 mm,l1=200 mm,l2=500 mm,r=38 mm,h=35 mm,直线模组位移与转动角参数为0≤lx=ly≤400 mm,-90°<θ≤90°。在已知机器人结构参数前提下,运用MATLAB仿真软件编写运动学算法,对运动学模型进行验证。随机选取10组lx,ly,θ参数数据,如表1所示。进行运动学正解运算,再将正结果进行运动学逆解运算,输出lx,ly,θ参数数据,如表2所示。
由表1、表2可知,该新型3-PRP并联机器人运动学模型精度高,其理论运行误差几乎为0。

表1 运动学正解验证数据
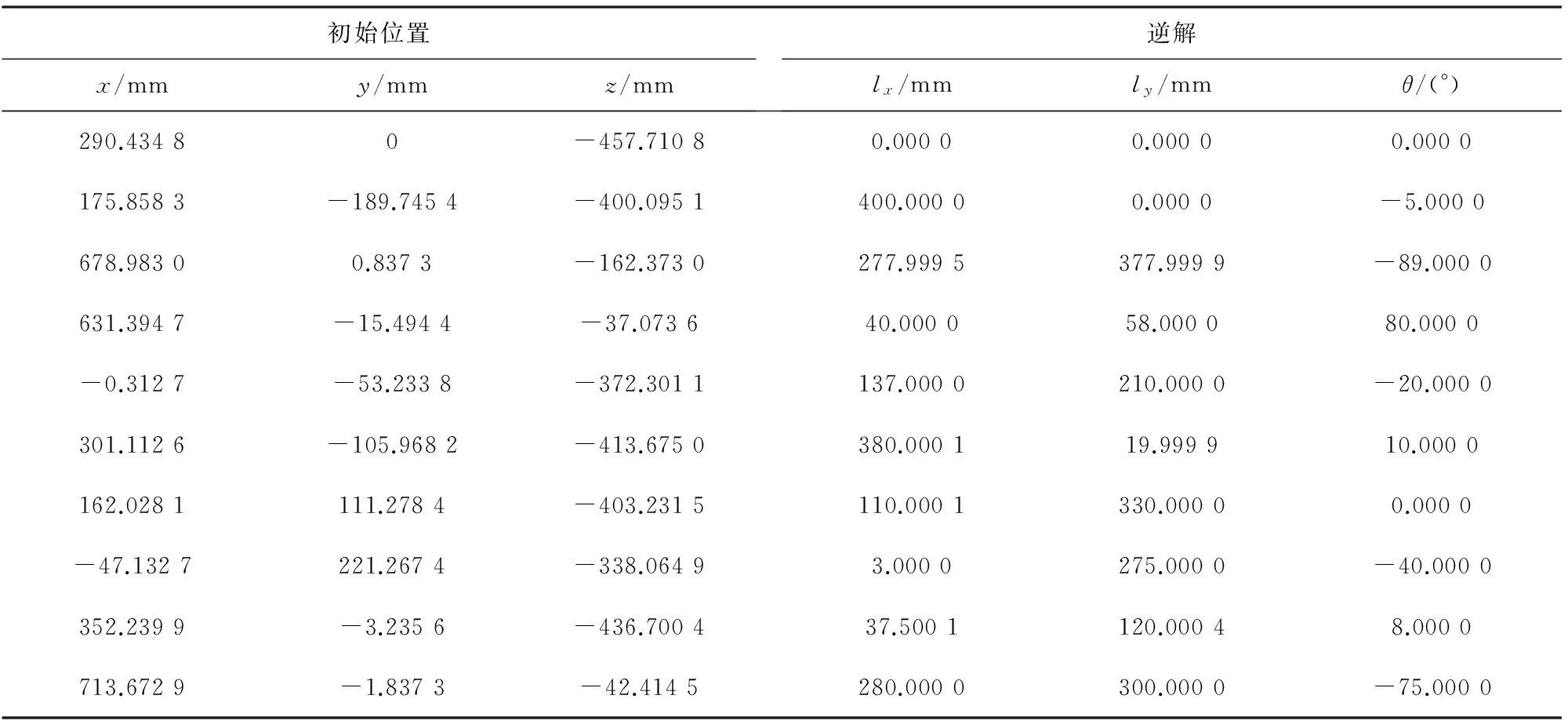
表2 运动学逆解验证数据
2.2 工作空间确立
机器人的工作空间[19-20]是指机器人末端操作器的工作区域,是衡量机器人性能的重要指标。根据末端操作器工作时的位姿特点,工作空间可分为可达工作空间和灵活工作空间。可达工作空间是指末端操作器上某一参考点可以到达的所有点的集合,这种工作空间不考虑操作的位姿。本文在运动学模型验证的基础上,以运动学正解算法为原型,利用MATLAB仿真软件编写工作空间算法,通过随机选取lx,ly,θ位置参数获得参考点J(x,y,z)可达到的所有点,即3-PRP并联机器人的可达工作空间。仿真结果如图3所示。
由图3可知,该新型3-PRP并联机器人的工作空间以运动学分析中的轴为中心,两边呈对称状。

图3 3-PRP并联机器人工作空间Fig.3 Workspace of 3-PRP parallel robot
当2个对称直线模组位移和转动角改变时,其工作空间从对称中心向两边扩散。结合该新型并联机器人采用2个对称直线模组的结构特点,该工作空间符合其理论分析。图中工作曲线光滑平稳,表明该机器人运动稳定,精度高。
文献[21]对传统并联机器人工作空间进行了分析,其机器人结构与工作空间参数见表3。表4是3-PRP并联机器人结构与工作空间参数。
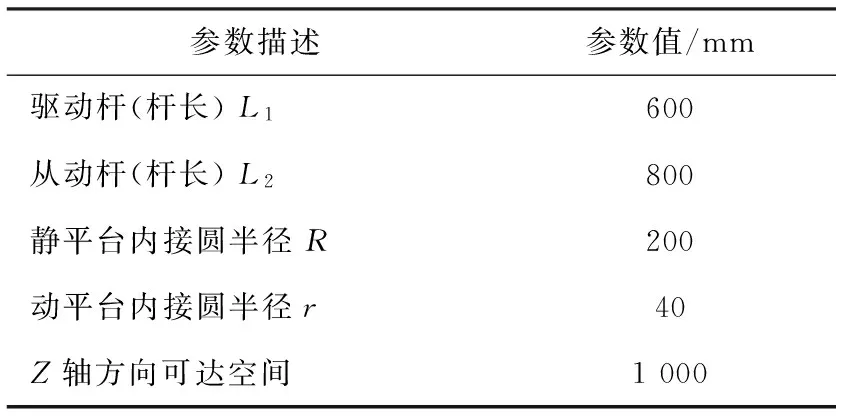
表3 传统并联机器人结构与工作空间参数
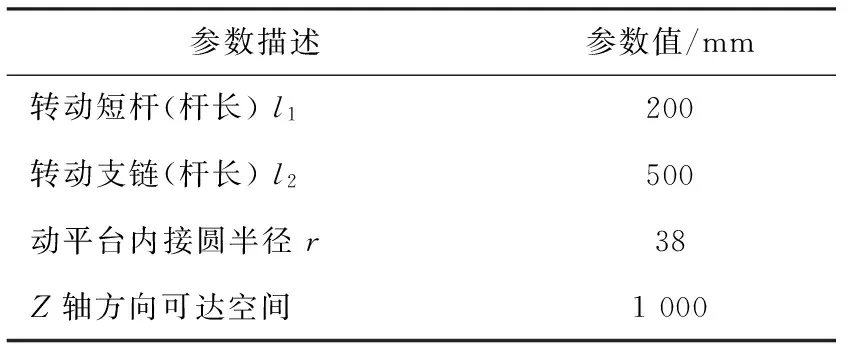
表4 3-PRP并联机器人结构与工作空间参数
由表3、表4可知,传统并联机器人与3-PRP并联机器人具有相同的Z轴方向工作空间,但传统并联机器人需要更大的结构参数。因此,3-PRP并联机器人的工作空间较大。
3 结 语
1)从机器人结构与工作空间考虑,提出了一种新型3-PRP并联机器人。该机器人采用2个对称直线模组,降低了机器人结构分析的难度。在结构分析的基础上,建立了运动学模型,利用空间解析几何与向量代数法分析了运动学正解与逆解。应用MATLAB仿真软件编程验证了运动学模型的正确性,确定了机器人工作空间,为设计者提供了一定的参考。实验结果表明:与传统并联机器人相比,该新型机器人具有运动空间大、制造成本低、抓取精度高等优点。
2)在实现三自由度抓取过程中,由于机构的特殊性,需避免机构奇异位置的出现。因此,需要对机器人奇异位置进行进一步研究,同时进一步优化控制算法,调整机器人运动与抓取速度,从而提高抓取效率。
3)在实际工业应用中,如果配置视觉系统,该新型并联机器人可以完成物料的分拣、繁杂装配等作业,这是未来的研究趋势。
/References:
[1] 邢燕兵. 并联机器人研究现状及展望[J]. 山东工业技术, 2015(10):133.
[2] 冯李航, 张为公, 龚宗洋,等. Delta系列并联机器人研究进展与现状[J]. 机器人, 2014(3):375-384. FENG Lihang, ZHANG Weigong, GONG Zongyang, et al. Developments of Delta-like parallel manipulators: A review[J]. Robot, 2014(3):375-384.
[3] 马晓丽, 陈艾华, 张雪莲,等. 并联机器人机构的创新与应用研究进展[J]. 机床与液压, 2007, 35(2):235-237. MA Xiaoli, CHEN Aihua, ZHANG Xuelian, et al. Progress in the innovation and application of parallel robot mechanism[J]. Machine Tool & Hydraulics, 2007, 35(2):235-237.
[4] 康晓娟. Delta并联机器人的发展及其在食品工业上的应用[J]. 食品与机械, 2014(5):167-172. KANG Xiaojuan. Development and application of Delta parallel robot[J]. Food & Machinery, 2014(5):167-172.
[5] 杜鹃, 吴洪涛, 张云剑. 共形空间中的少自由度空间并联机构正解[J]. 机械设计与制造, 2015(6):1-4. DU Juan, WU Hongtao, ZHANG Yunjian. Forward displacement of spatial parallel mechanisms with limited mobility position in conformal space[J]. Machinery Design & Manufacture, 2015(6):1-4.
[6] 杨斌久, 蔡光起, 罗继曼,等. 少自由度并联机器人的研究现状[J]. 机床与液压, 2006(5):202-205. YANG Binjiu, CAI Guangqi, LUO Jiman, et al. The state of research on limited-DOF parallel robot[J]. Machine Tool & Hydraulics, 2006(5):202-205.
[7] 李嵩. 少自由度并联机构基本型的分析与综合[D]. 重庆:重庆大学, 2007. LI Song. Analysis and Synthesis of Classic Lower-Mobility Parallel Manipulator[D]. Chongqing: Chongqing University, 2007.
[8] 宫赤坤, 欧阳辉, 余国鹰,等. Delta并联机器人参数优化设计[J]. 现代制造工程, 2015(7):26-29. GONG Chikun, OUYANG Hui, YU Guoying, et al. Delta parallel robot parameters optimization design[J]. Modern Manufacturing Engineering, 2015(7):26-29.
[9] 黄秀琴, 潘晨. 一种三自由度并联机器人的参数化建模及其优化设计[J]. 制造业自动化, 2016(9):68-71. HUANG Xiuqin, PAN Chen. Parametric modeling and optimal design of a three degree of freedom parallel manipulator[J]. Manufacturing Automation, 2016(9): 68-71.
[10]NI Yanbing, WU Nan, ZHONG Xueyong, et al. Dimensional synthesis of a 3-DOF parallel manipulator with full circle rotation[J]. Chinese Journal of Mechanical Engineering, 2015(4):830-840.
[11]李伟, 王权, 何兵,等. 一种新型四自由度混联机器人的设计与分析[J]. 机械设计与制造, 2015(5):168-170. LI Wei, WANG Quan, HE Bing, et al. Design and analysis of a new 4-DOF hybrid robot[J]. Machinery Design & Manufacture, 2015(5):168-170.
[12]DONG G, SUN T, SONG Y, et al. Mobility analysis and kinematic synthesis of a novel 4-DOF parallel manipulator[J]. Robotica, 2014, 34(5):1-16.
[13]GUO S, YE W, QU H, et al. A serial of novel four degrees of freedom parallel mechanisms with large rotational workspace[J]. Robotica, 2014, 34(4):1-13.
[14]李瑞霞. 五自由度并联机器人机构运动性能优化研究[J]. 机床与液压, 2015(3):47-51. LI Ruixia. Kinematics performance optimization and research of 5-DOF parallel robot[J]. Machine Tool & Hydraulics, 2015(3):47-51.
[15]LU Y, LIU Y, YE N. Dynamics analysis of a novel 5-DOF 3SPU+2SPRR type parallel manipulator[J]. Advanced Robotics, 2016, 30(9):595-607.
[16]陈修龙, 冯伟明, 赵永生. 五自由度并联机器人机构动力学模型[J]. 农业机械学报, 2013(1):236-243. CHEN Xiulong, FENG Weiming, ZHAO Yongsheng. Dynamics model of 5-DOF parallel robot mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013(1):236-243.
[17]梁师望. MATLAB在并联机器人运动仿真中的应用[J]. 机电一体化, 2000, 6(6):56-57. LIANG Shiwang. Application of MATLAB in kinematics simulation of parallel robot[J]. Mechatronics, 2000, 6(6):56-57.
[18]宁淑荣, 郭希娟. MATLAB在并联机器人机构仿真中的应用[J]. 系统仿真学报, 2004, 16(10):2273-2275. NING Shurong, GUO Xijuan. The application of MATLAB in simulation of the parallel mechanism[J]. Journal of System Simulation, 2004, 16(10):2273-2275.
[19]梁香宁, 牛志刚. 三自由度Delta并联机器人运动学分析及工作空间求解[J]. 太原理工大学学报, 2008, 39(1):93-96. LIANG Xiangning, NIU Zhigang. Kinematic analysis and workspace of 3-DOF Delta parallel robot[J]. Journal of Taiyuan University of Technology, 2008, 39(1):93-96.
[20]颜文旭,宁金,孙强,等.一种新型欠驱动型并联机器人的运动学分析与仿真[J].河北科技大学学报,2017,38(2):190-195. YAN Wenxu,NING Jin,SUN Qiang,et al.Kinematics analysis and simulation of a new underactuated parallel robot[J].Journal of Hebei University of Science and Technology,2017,38(2):190-195.
[21]彭煜. Delta机器人数字化设计及其工作空间研究[D]. 芜湖:安徽工程大学, 2014. PENG Yu. Digital Design and Workspace Analysis of Delta Robot[D]. Wuhu: Anhui Polytechnic University, 2014.
Kinematics and simulation of a novel 3-PRP parallel robot
YU Zhenzhong, SUN Qiang, NING Jin
(Key Laboratory of Advanced Process Control for Light Industry, Ministry of Education, Jiangnan University, Wuxi, Jiangsu 214122, China)
Aiming at the problem of the difficulty to analyze the structure of traditional 3-DOF parallel robot,based on the analysis of structure and performance of the traditional parallel robot, a novel 3-PRP parallel robot is proposed. To effectively reduce the difficulty of the structure analysis, the linear modules are adopted to form two symmetrical moving pairs, with a rotation pair to take place of three rotation pairs of traditional 3-DOF parallel robot, and according to the structural characteristics of the new robot, the kinematic model is established. Then the forward and inverse kinematics solutions of robot are derived by space analytic geometry and vector algebra. At last, the correctness of the forward and inverse kinematics solutions are verified by MATLAB programming, and the workspace of the robot is established.The simulation results show that the robot has the characteristics of large workspace, high precision of kinematics model and low manufacturing cost, and has a wide range of industrial applications.
robot control; 3-PRP; parallel robot; kinematics model; simulation; workspace
1008-1534(2017)03-0183-06
2017-03-24;
2017-04-17;责任编辑:冯 民
江苏省自然科学基金(BK20130159)
于振中(1980—),男,安徽宿州人,副教授,博士,主要从事机器人本体设计、机电一体化技术及运动控制系统等方面的研究。
E-mail:yzzrobot@126.com
TH122
A
10.7535/hbgykj.2017yx03006
于振中,孙 强,宁 金.一种新型3-PRP并联机器人的运动学分析与仿真[J].河北工业科技,2017,34(3):183-188. YU Zhenzhong, SUN Qiang, NING Jin.Kinematics and simulation of a novel 3-PRP parallel robot[J].Hebei Journal of Industrial Science and Technology,2017,34(3):183-188.
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
电子制作(2019年12期)2019-07-16
制造技术与机床(2018年11期)2018-11-23
中国交通信息化(2018年5期)2018-08-21
橡塑技术与装备(2018年14期)2018-07-20
电子制作(2018年8期)2018-06-26
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
