
基于PID算法控制的电动自平衡独轮车设计
2017-06-15 18:32甄圣超杨培东
制造业自动化 2017年5期
甄圣超,高 远,黄 康,张 昭,杨培东
(合肥工业大学 机械工程学院,合肥 230009)
基于PID算法控制的电动自平衡独轮车设计
甄圣超,高 远,黄 康,张 昭,杨培东
(合肥工业大学 机械工程学院,合肥 230009)
针对当前实际生产中电动自平衡独轮车开环控制、稳定性及可靠性不强等问题,提出一种基于PID算法控制的电动自平衡独轮车设计,选用DSP作为主控芯片,利用传感器数据融合技术,采集陀螺仪和加速度计测量的车身姿态信息,并利用位置式PID控制算法计算直流无刷电机的控制力矩,形成闭环控制,平衡车具有动态响应好、稳定、鲁棒性好的优势。
电动自平衡独轮车;传感器数据融合;PID算法;闭环控制
0 引言
电动自平衡独轮车具有结构简单、性价比高、携带方便、运动性灵活等很多优点,成为一种新兴的电动代步工具[1]。独轮车的控制主要分俯仰和横滚平衡控制,其中横滚平衡主要由骑行者来实现,俯仰平衡的控制原理和一级倒立摆类似[2],人往前倾时,采用陀螺仪的控制器控制电机往前运动,人往后倾时,电机往后运动,保持人的平衡。倒立摆和陀螺都是动态平衡、动态稳定的系统,决定了独轮车需要时刻不断调节使其处于动态平衡的本质[3]。
目前实际生产中电动自平衡独轮车开环控制、稳定性及可靠性不强等问题,本文提出一种基于PID算法控制的电动自平衡独轮车设计,采用直流无刷电机驱动的轮毂电机,DSP数字信号处理器为主控制器,控制系统包括陀螺仪传感器、直流无刷电机驱动器、平衡控制组成,通过陀螺仪传感器的加速度计和陀螺仪检测角度信息,这两个角度经过处理,形成没有漂移的、抗干扰能力强的角度信号,利用PID算法对角度信号进行处理,得到控制信号,进而控制直流无刷电机使独轮车保持平衡。
1 独轮车系统模型设计
1.1 机械结构设计
本文设计的独轮车机构主要由轮毂电机、塑料外壳、DSP、电源和踏板等部分组成,其模型如图1所示,其总重量为10kg,外轮直径为360mm,其中踏板采用铝合金材质,降低重量增加结构强度,踏板和车体刚性连接,其倾斜角度反应车体的俯仰角度,进而来保持人体的平衡。DSP和电源分别布置在外壳箱体的两侧,利于布线方便和平衡重心。
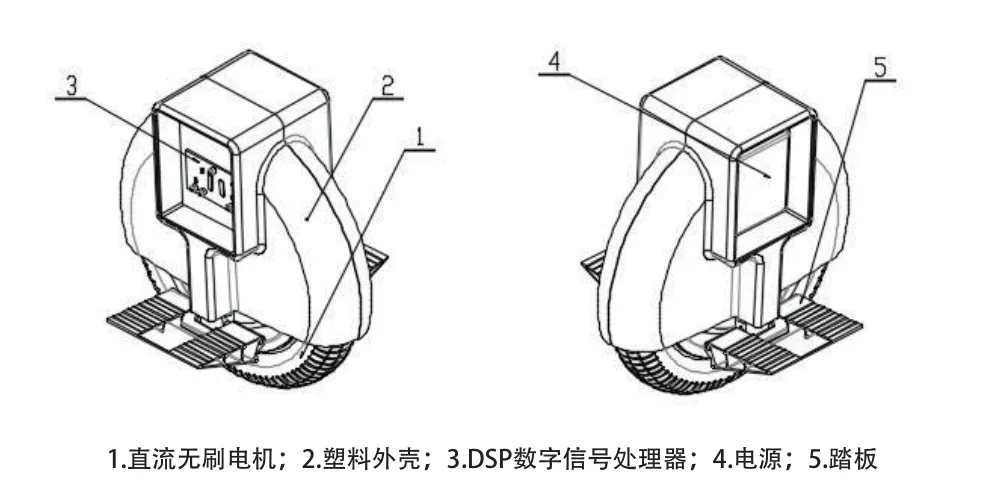
图1 SolidWorks工程图独轮车模型
1.2 控制系统设计
独轮车通过对直流无刷电机的控制进而保持整体的动态平衡,其控制系统原理如图2所示。通过陀螺仪及其加速度计来采集人体的姿态信息,通过数据融合滤波后[4],将得到的漂移、抗干扰能力强的角度信号发给DSP,利用PID算法对角度信号进行处理后,DSP输出转矩控制信号给直流无刷电机,通过其自带的霍尔传感器检测电机的位置信号,形成电机闭环控制,提高系统稳定性、准确性。
1.2.1 硬件设计
硬件部分设计主要包括DSP控制器、陀螺仪数据采集和无刷直流电机驱动器,已开发出的硬件板如图3所示。尺寸:长×宽=134mm×79mm;工作电压:36V~68V下可正常工作;最大工作电流:30A;最大总功率:1500w;通讯方式:模拟量和串口控制;工作模式:力矩和速度模式。
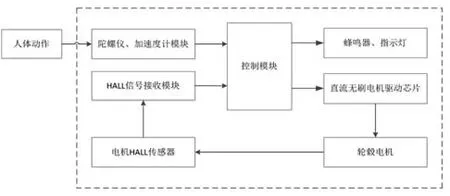
图2 控制原理图
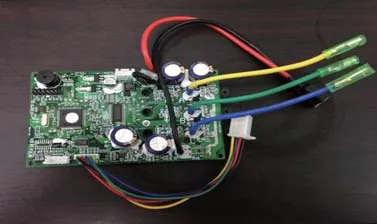
图3 控制器硬件板
1)陀螺仪采用性能稳定的9轴运动处理传感器MPU6050陀螺仪,集成了3轴MEMS陀螺仪,3轴MEMS加速度计,以及一个可扩展的数字运动处理器。MPU-6050对陀螺仪和加速度计分别用了三个16位的ADC,将其测量的角度模拟量信号转化为数字量信号,同时具有测量范围可调的优点,陀螺仪可测范围为±250,±500,±1000,±2000°/秒(dps),加速度计可测范围为±2,±4,±8,±16g。一个片上1024字节的FIFO(First-In First-Out),有助于降低系统功耗。
2)主处理器采用功能强、可扩展性强的TMS320F2809DSP作为主处理器,基本兼容TMS320F2812DSP程序,同时拥有丰富外设资源和100M的运算能力,使开发难度大幅度降低,可以实现控制器的快速开发。其与陀螺仪接口线路如图4所示。
3)直流无刷电机驱动芯片采用德州仪器集成型三相无刷电机前置驱动器DRV8301,可在驱动达60 A FET的同时,将板级空间锐减60%,其三相无刷栅极驱动器通过8V~60V单电源提供源极达1.7A、汲极达2.3A的栅极驱动电流,可调节压摆率与停滞时间来优化性能。
1.2.2 陀螺仪、加速度计信号融合和程序
为了实现独轮车的自平衡控制,首先应该得到足够的车身倾斜角度的数据。采用MPU6050陀螺仪来采集独轮车的姿态信息。控制系统除了需要实时倾角信号,还需要角速度加以控制。即采用加速度计测量倾斜角度,陀螺仪输出相对灵敏轴的角速率。
1.2.2.1 传感器数据处理
加速度计可以测量动态及静态的线性加速度。其中,加速度传感器静止时,输出作用在其灵敏轴上的重力加速度值,可以根据各轴上的重力加速度的分量值算出物体垂直和水平方向上的倾斜角度。但是加速度计动态响应慢,不适合跟踪动态角度运动且过快响应会产生较大噪声。
陀螺仪测量角速度信号,通过对其积分得到角度制,但是考虑温度变化、摩擦力及不稳定力矩等因素,陀螺仪会产生漂移误差[5]。
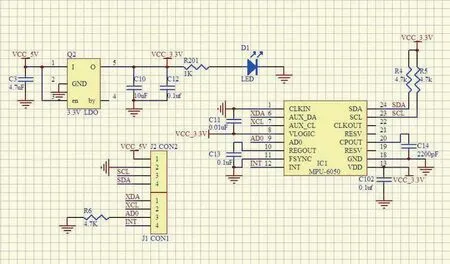
图4 DSP与陀螺仪接口图
故为了克服上述困难,本文采用一种简易互补滤波方法来融合陀螺仪和加速度记输出信号,补偿加速度计的动态误差及陀螺仪的漂移误差,得到更优的倾角值。
1.2.2.2 传感器数据融合
针对加速度计静态响应好,但动态响应慢的问题,需采用低通滤波算法除去短时行快速变化的信号,保留长时性缓慢变化信号。采用的方法是给变化较快的信号乘上较小的权重系统,以削弱突变信号对整体的影响。对于陀螺仪情况正好相反,采用高通滤波方法处理其数据,进而抑制陀螺仪积分的漂移。
陀螺仪的高通滤波和加速度计的低通滤波两部分恰好构成一个互补滤波器,在通过四元数法进行姿态解算,获取精确的独轮车实际倾斜角度值。其融合程序编程变量如图5所示。
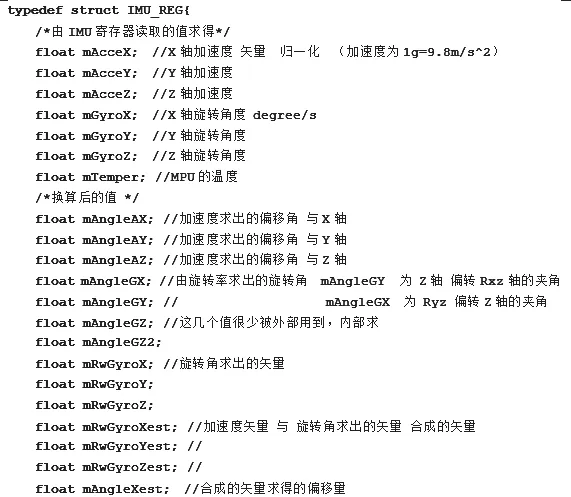
图5 传感器融合程序变量
3 平衡控制算法
将MPU6050陀螺仪来采集独轮车的姿态信息,通过互补滤波、四元数法姿态解算后,得到实际精确的独轮车倾斜角度值θact。再将获取的实际倾斜角度值θact与目标倾斜角度值θref相减,计算出误差e(k):

利用位置式PID控制算法计算直流无刷电机的控制力矩u(k)[6,7]:

其中Kp为比例系数,Ki微积分系数,Kd为微分系数;u(k)是第k个采样时刻的控制力矩,e(k-1)是第k-1个采样时刻的误差,e(i)是第i个采样时刻的误差,i=0, 1,…,k。具体算法流程如图6所示,根据计算得到的直流无刷电机控制力矩u(k),输出PMW控制信号驱动直流无刷电机运动。
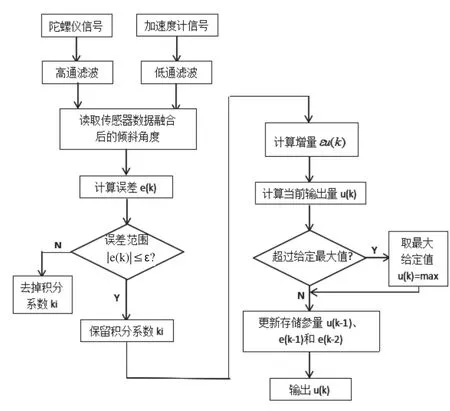
图6 PID算法流程图
经过测试,本文设计的电动自平衡独轮车,85kg的人可以上15°的坡,时速可达16公里每小时,控制板峰值功率可达1000W,额定功率500W。
4 结论
本文设计的基于PID算法的电动自平衡独轮车,选用DSP为主控芯片,通过传感器数据融合技术将加速度计和陀螺仪信号进行融合,进而精确判断车辆倾角,运用PID控制算法控制直流无刷电机,不仅形成闭环控制策略,形成稳定快速的动态平衡响应,而且可以使控制板电流达到60A,控制板可靠性强,鲁棒性好,控制稳定。
[1] 王启源.独轮自平衡机器人建模与控制研究[D].北京:北京工业大学,2011:11-15.
[2] 申晓峰,章玮.电动独轮车的的模糊自适应控制[J].机电工程, 2014,31(12):1610-1614.
[3] 彭振峰,宋楠楠,陈明权.无刷直流电机在独轮车驱动系统中的应用[J].变频世界,2014,(5):95-98.
[4] 冯智鹏,等.基于陀螺仪及加速度信号融合的姿态角度测量[J].西南师范大学学报(自然科学版),2011,36(4):137-141.
[5] 吉训生,骆鹏,肖国强.自适应Kalman滤波在MEMS陀螺仪信号处理中的应用[J].传感器与微系统,2006(9):79-85.
[6] 任俊杰,李永霞,李媛,等.基于PLC的闭环控制系统PID控制器的实现[J].制造业自动化,2009,31(4):20-23.
[7] 董景新,赵长德,郭美凤,等.控制工程基础[M].北京:清华大学.
Design of electric self-balanced wheelbarrow based on PID algorithm
ZHEN Sheng-chao, GAO Yuan, HUANG Kang, ZHANG Zhao, YANG Pei-dong
TP249
:A
:1009-0134(2017)05-0144-03
2017-03-28
国家自然科学基金资助项目(51505116);中央高校基本科研业务费专项资助项目(JZ2016HGTB0716);国家级大学生科技创新项目(201510359008);中国博士后科学基金资助项目(2016M590563)
甄圣超(1988 -),男,安徽合肥人,讲师,博士,研究方向为机械系统动力学及不确定系统控制方法。
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02
机电信息(2022年9期)2022-05-07
计算机仿真(2021年11期)2021-12-10
北京航空航天大学学报(2021年9期)2021-11-02
电子制作(2019年10期)2019-06-17
百科探秘·航空航天(2017年9期)2017-12-31
作文大王·低年级(2017年10期)2017-10-28
中国惯性技术学报(2017年1期)2017-06-09
山东工业技术(2016年15期)2016-12-01
