
三维扫描技术在3ds Max建模中的应用探究
2017-06-15 18:31陈艳雷惠延波冯兰芳
制造业自动化 2017年5期
陈艳雷,惠延波,冯兰芳
(河南工业大学 先进制造研究所,郑州 450001)
三维扫描技术在3ds Max建模中的应用探究
陈艳雷,惠延波,冯兰芳
(河南工业大学 先进制造研究所,郑州 450001)
以某油田锅炉房的整体三维数据扫描为例,介绍了三维扫描仪的应用,及在建模前点云数据的获取环节采用不同测量方式的比较;如何用FARO SCENE软件对点云数据进行处理转换,以及点云导入3ds Max软件中的注意事项;以锅炉房中的锅炉主要设备的三维建模为例,说明了点云数据在3ds Max软件建模中的重要存在,给建模带来了哪些便利。最终得出一套行之有效的三维扫描应用于3ds Max软件建模的方法。
点云;数据处理;三维激光扫描;3ds Max软件
0 引言
科技与社会的进步不断推动着时代的发展,数字化建设越来越被提上日程。大型复杂的建筑物以及一些复杂基础设施的建模日趋难以进行,三维扫描技术的出现大大解决了传统意义上测绘建模所遇到的困难。三维扫描技术可以将具体实物的整体信息数据包括颜色在内转换成计算机可以识别的数字信号,这为物体的数字化建模指明了一条既方便又快捷的道路[1,2]。
扫描仪将扫描的数据以点的形式记录下来,而且每一个点都有其特定的三维坐标。这一逆向工程中通过三维扫描仪获得的密集数据点的集合称为点云。通过扫描仪扫描出来的模型,直接用来建模或者模型渲染,非常的快速有效。新版的3ds Max(2014版或更高的版本)支持点云系统。扫描来的点云数据经过处理可以导入3ds Max中,然后便可参照点云数据在3ds Max操作界面中进行建模以及贴图、运动仿真、3D动画、虚拟现实等其他的一些后续操作。本文以锅炉房的具体锅炉设备建模为例,分析比较了不同测量方式的优缺点,建模采用具有添加点云识别功能的新版3ds Max(本次选用2015版)进行建模,该种方法在建模效率及模型精度等方面有着明显的优势。
1 三维扫描与数据处理
1.1 测量方式的对比与选取
数字化进程的加速使得三维测量系统也得到了丰富的发展,测量方法随着不同的测量需求也越来越多。目前公认的三维测量方法有两大类:一是接触式测量,另一类就是非接触式测量。
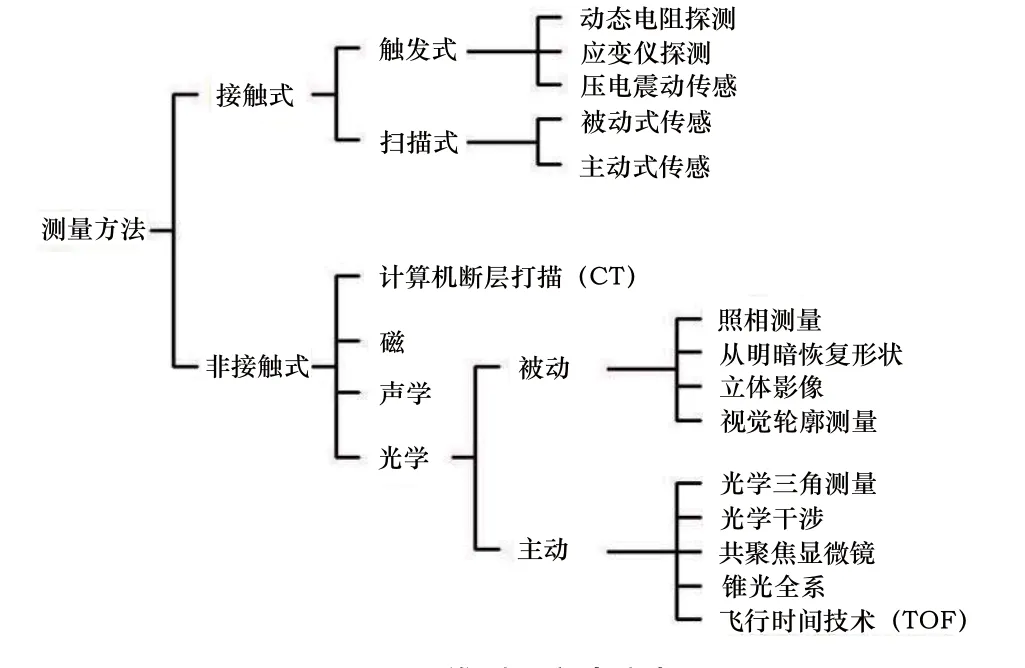
图1 三维测量方法分类
接触式测量使用的设备主要是三坐标测量机(CMM)或机械手臂式测量机[3];非接触式测量主要使用的设备有三种:一种是基于激光测距法技术的三维扫描仪;另一种是基于光栅编码法技术的三维扫描仪;还有一种是基于数字摄影测量技术的影像扫描仪[4~6]。各扫描仪均有其适用的扫描场景及其独特的优越性,可以根据不同的测量需要来进行选择。接触式测量与非接触式测量的优缺点及其应用如表1所示。
由于本次测量的对象是锅炉房的锅炉设备,目的是用3ds Max软件建出三维效果图,无需被测物的紧密公差,且需要快速获取全局数据,场景模型有大有小,因此需要比较密集的点云数据。综合考虑,本次扫描选用非接触式测量仪器进行,本次扫描仪器选用美国FARO公司生产的FARO Laser Scanner Focus 3D X330激光扫描仪。
1.2 FARO Focus 3D X330三维扫描仪的工作原理
FARO Focus 3D X330激光扫描仪是一种高精密的测量设备,扫描所得到的三维点云图像与实景别无二致。该扫描仪采用的的是相位偏移测量技术。其工作原理为:将由激光发射器发出的红外线激光束打到高速旋转的光学反光棱镜的中心区域,该反光棱镜可以使激光束在围绕扫描环境垂直旋转的方向上产生偏差,之后将周围对象的散射光反射回扫描仪中由激光接受器接收,通过测量红外线光波的相位偏移,即可精确判断出仪器到目标物体的距离。通过借助特殊的调制技术提高了调制信号的信噪比,并通过角度编码测量器技术暗处反光棱镜的水平旋转以及镜像旋转,再应用仪器内部算法计算出扫描范围内物体表面各点相对于扫描仪的X、Y、Z坐标和R、G、B信息,从而形成物体的三维点云数据。该扫描仪可进行水平360°和垂直300°的快速扫描,分辨率可以达到毫米级别。
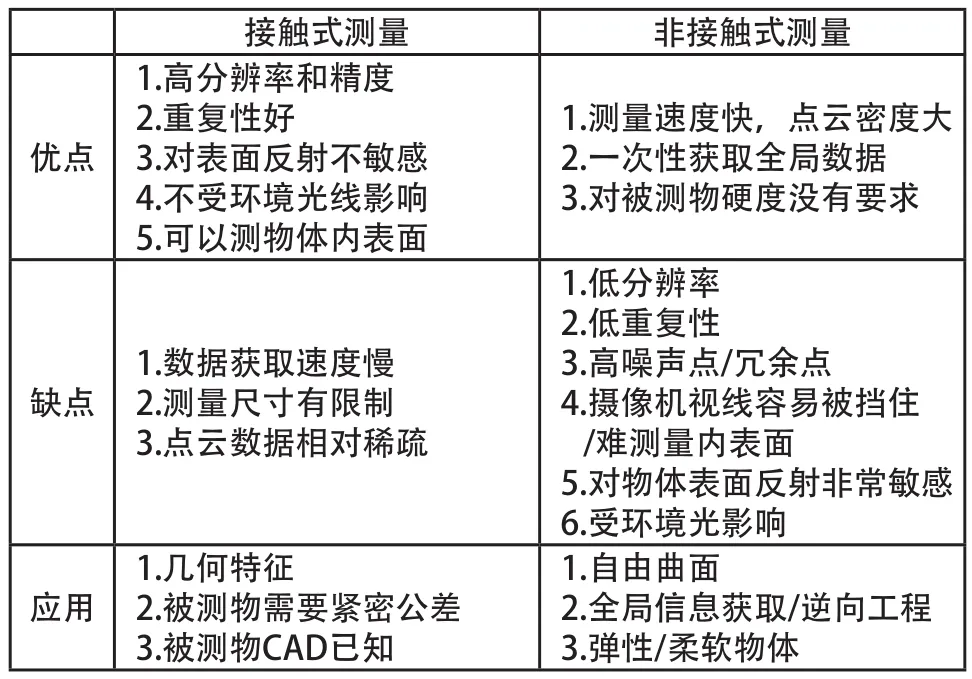
表1 接触式测量与非接触式测量的比较
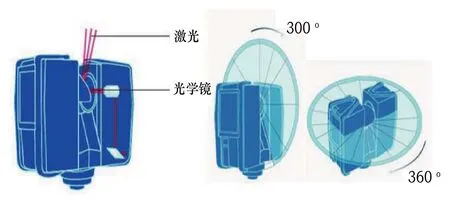
图2 FARO Focus 3D X330三维扫描仪的结构
1.3 三维数据的采集与处理
1.3.1 数据的采集
本次数据采集的对象是整个锅炉房,故需对锅炉房进行三维扫描。考虑到一些负面因素对扫描质量的影响,本次扫描任务选在天气晴朗,温度适宜,扫描时段为上午九时至下午四时进行,扫描站数由锅炉房的整体大小与设备复杂程度及设备空间布局决定,本次整个锅炉房共扫描二十二站,设定扫描分辨率为1/8,每个场景的扫描时间约为5~6分钟。
为了能使在不同视点下扫描各站之间点云数据的坐标能够转换至同一坐标系之中,扫描之前需在锅炉房场景中放置白球作为标靶球进行精准定位,每站扫描时需保证视场内至少有三个不在同一条直线上的标靶球[7,8]。

图3 不在同一直线上的四个标靶球
1.3.2 数据的处理
FARO Laser Scanner Focus 3D激光扫描仪扫描来的点云数据以fls格式的文档进行存储,该种格式的文件3ds Max软件无法识别,还需经过FARO SCENE软件的处理。FARO SCENE软件是一款专为FARO Laser Scanner Focus 3D和FARO Scanner Freestyle 3D而设计的三维存档软件。将扫描来的原始点云数据导入FARO SCENE软件中,然后用软件中的预处理扫描功能对扫描来的多站数据进行拼接,该功能可以查找球体与棋盘板并使扫描来的点云变成彩色。处理完成以后,需要将扫描场景中的噪点删除,根据后续3ds Max建模场景的需要,可以点击软件中的创建剪裁框命令将拼接来的点云数据进行剪裁,操作完成后,便可导出当前的数据文件,为后续3ds Max软件的精确建模提供尺寸依据。
2 参考点云的3ds Max建模
2.1 点云数据的导入
将之前保存好的点云数据导入3ds Max软件中,便可以参照点云数据进行建模了。导入点云时需要特别注意,需将点云中地面所在的高度调整到零点位置,调整后坐标不要随意更改,以利于后续场景中与其他模型的整合。即点云数据只需导入软件中一次然后保存成max格式文件,最后再分配建模任务。由于点云数据的场景很大,实际建模的过程中是多人分工完成最终汇总到一块的,并且每个人对自己的场景进行建模也是逐一模型进行的,可此时以对点云数据做显示体积的处理,这样就避免了多余点云的干扰,针对性强,提高了建模效率。另外根据不同的计算机图形处理能力,可以在软件中的细节设置级别中调节点云的稀疏,以此使计算机得运行能力与载入点云的3ds Max软件良好匹配。
2.2 模型构建
参照点云数据进行建模,即以点云作为模型的尺寸与位置来源,来达到建模的目的,所建的模型与点云的轮廓一般大小。点云数据在软件中的应用避免了单纯使用3ds Max软件建模前期大量繁琐的准备工作以及后期的尺寸对比工作,而且由于点云的存在建模的过程中也可以节省大量的时间和精力。以锅炉房中的具体某处锅炉为例,锅炉上的主要部件为电机、管线、配电柜、阀门、锅炉、护栏及锅炉支撑,建模时可参照点云的轮廓依据相关命令创建对象并使用拉伸、挤出、优化、附加等命令并配以移动、旋转、缩放、对象捕捉等建出锅炉房的某处锅炉。
另外,由于整体的建模场景非常大,所有的模型整合到一起会占用较大的计算机运行内存,而模型所占内存主要是由模型所占多边形的个数(此时暂不考虑模型贴图的大小)决定的,因此制作模型时在不影响模型外观的情况下要尽可能使用较少的面数。
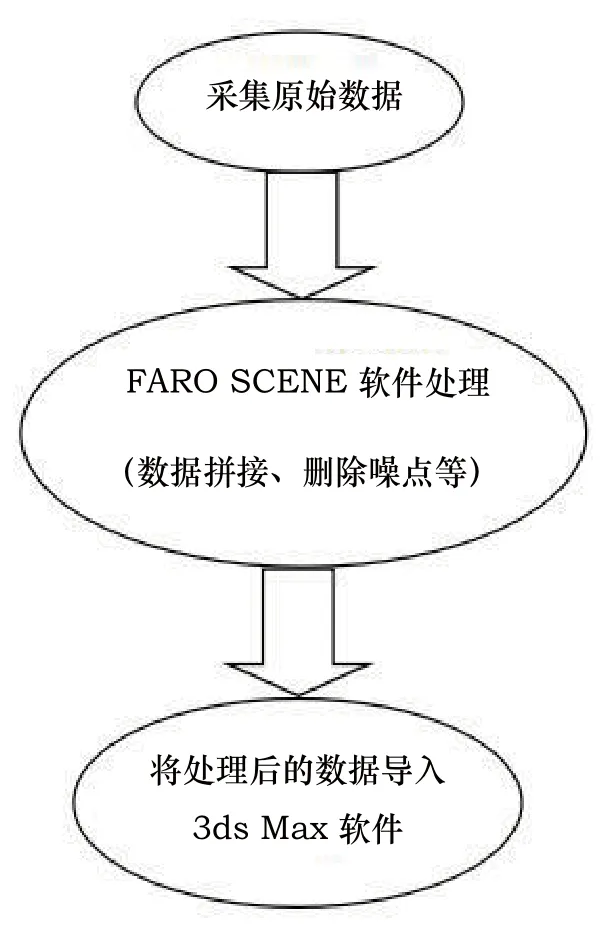
图4 点云数据采集与处理的流程图
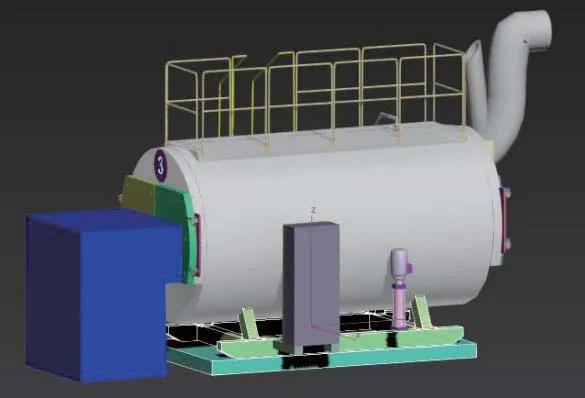
图5 锅炉房某锅炉主要设备三维模型
3 结束语
本文通过三维扫描技术与3ds Max软件建模技术的结合探索出了一套参照点云数据进行建模的可行性方案,并通过对比得出锅炉房建模在数据采集阶段采用非接触式测量的优势,三维扫描仪的介入减少了外业工作人员的劳动强度,参考点云进行建模省时、方便、效率高、模型精确,为后续的3D动画制作以及虚拟现实的实现做出了充足的前期准备。
[1] 邓世军,等.基于激光点云数据的三维建模技术研究[J].科技资讯,2015(10):32-33.
[2] 吴险峰.三维激光彩色扫描仪关键技术研究[D].武汉:华中科技大学,2004.
[3] 冯兰芳,张坤,惠延波.逆向工程技术在某皮卡车身开发中的应用[J].机械研究与应用,2014,27(4):62-64.
[4] 李秀华,庄新,宋立明.激光测距技术探究[J].长春工程学院学报(自然科学版),2012,13(4):39-41.
[5] 程俊廷,赵灿,莫健华.基于三维光栅扫描测量的全自动标定技术[J].制造技术与机床,2007(2):71-75.
[6] 周克勤,周俊召,赵煦.近景摄影测量技术在数字城市中的应用[J].北京测绘,2007(1):42-46.
[7] 汪霖,曹建福,韩崇昭.基于空间球的三维激光扫描仪标定算法[J].西安交通大学学报,2013,47(4):79-85.
[8] 梁建军,等.三维激光扫描仪球形靶标测量方法与精度评定[J].工程勘察,2011(1):81-84.
The application research of threedimensionalscanningtechnology in 3ds Max modeling
CHEN Yan-lei, HUI Yan-bo, FENG Lan-fang
TB22
:A
:1009-0134(2017)05-0136-03
2017-03-12
国家科技支撑计划项目(2012BAF12B13)
陈艳雷(1992 -),男,河南永城人,硕士研究生,研究方向为逆向工程和制造业自动化。
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
煤气与热力(2022年2期)2022-03-09
昆明医科大学学报(2021年6期)2021-07-31
科学(2020年5期)2020-11-26
模具制造(2019年3期)2019-06-06
小哥白尼(趣味科学)(2019年2期)2019-04-17
东方教育(2018年16期)2018-08-22
大陆桥视野(2016年14期)2016-12-27
儿童故事画报·发现号趣味百科(2016年3期)2016-06-24
现代营销·经营版(2015年3期)2015-04-20
