
虚拟视景系统在制导武器中应用研究
2017-06-15 13:38吕鸿鹏孙卫平张西京武江鹏
兵器装备工程学报 2017年5期
骆 强,梁 超,吕鸿鹏,孙卫平,宋 哲,张西京,任 勐,武江鹏
(西安现代控制技术研究所,西安 710065)
【装备理论与装备技术】
虚拟视景系统在制导武器中应用研究
骆 强,梁 超,吕鸿鹏,孙卫平,宋 哲,张西京,任 勐,武江鹏
(西安现代控制技术研究所,西安 710065)
针对典型制导武器的常规实装训练成本高、寿命短、安全系数差等问题,提出一套虚拟视景系统并研究该系统的若干关键技术,主要包括利用OSG技术建立虚拟战场及场景渲染、基于Google Earth 数据源建立环境模型、基于“射线/体”的交运算完成碰撞检测和靶点判定;通过该系统进行典型制导武器打击坦克目标虚拟仿真实验,仿真结果表明该系统在晴、小雨、中雨、雾等几种天气、地区和干扰类型均达到85%置信度;所获结果可为军事模拟尤其是目标打击模拟提供一种成本低、可行性强的方法。
信息光学;制导武器;虚拟视景;仿真建模;OSG
典型制导武器系统自引进以来一直采用常规军事演习的方式训练部队、体验实战[1-3]。一般而言,常规的实装训练方式不仅耗费大量资金和军用物资,而且缩短了装备使用寿命,且训练安全存在不确定的隐患将会导致损失进一步加剧。随着科技进步,基于虚拟场景的武器打击仿真技术因能有效克服上述缺点,降低实装训练成本,越来越受到军队推崇。虚拟视景仿真为场景重建的高级阶段,也是虚拟现实技术的重要表现形式,使体验者产生身临其境感觉的交互式仿真环境,实现体验者与该环境直接进行自然交互[4-6]。虚拟视景仿真采用计算机图形图像技术,根据仿真的目的,构造仿真对象的三维模型或再现真实的环境,达到逼真的仿真效果。例如:李军华等[7]团队开发了视景仿真控制台程序,能根据用户的需求对仿真过程进行管理、控制和监视,添加对象并设定和修改其参数,并对视景仿真过程进行控制,实现导弹攻防过程的仿真初始化,并能将仿真数据提供给其他军事成员。胡涛等[8]提出了视景仿真的建模流程并采用了Vega渲染环境,用于实时视觉模拟的定义和场景的描述,扩展了视景仿真技术在军事研究领域。虚拟视景仿真技术具有投资少、风险低、重复,训练效果好等优点,因而在军事及国防领域得到了广泛的应用[9]。目前,研究人员已开始利用导弹武器仿真的模块化体系结构框架实现了导弹武器系统发射阵地视景仿真,虚拟仿真环境和运动模型的构建[10],基于计算机技术和虚拟现实技术的虚拟视景仿真正朝着高逼真度、互联互通和扩展性越来越好的方向发展[11]。通过研究基于虚拟视景仿真的关键技术并对其应用,实现仿真型导弹武器系统的模型系统,可为相关技术的进一步研究奠定基础。
1 虚拟视景系统设计
该虚拟视景系统主要包括以下的组成部分:目标(坦克、装甲车),背景(山区,陆地,海洋),视景生成,大气计算,环境设置,场景驱动,人机操作界面。系统各部分的结构关系如图1所示。

图1 仿真系统的框架组成
系统建立的步骤如下:
1) 首先根据已有的材质库,不同材质的纹理特征等物理特性对不同的目标进行分类,得到不同的目标数据、包括山区、平原、庄稼、海洋等不同的场景等;
2) 其次对虚拟场景进行参数配置,包括作战地区,作战天气,作战环境,海拔,经纬度,发射载体,制导武器的初始位置等,制导武器的目标模型通常为坦克装甲车等;
3) 然后虚拟计算生成弹道参数,完成对虚拟场景的驱动,在人机交互界面上设计出虚拟仿真实验方案,生成的弹道参数文件会驱动可视化系统;
4) 最后完成大气参数的计算,根据提供的环境参数,完成对应的大气能见度,透过率等参数的计算。
2 虚拟视景系统的关键技术研究
Open Scene Graph(OSG) 图形系统是一个基于工业标准OpenGL 的软件接口,可为图形元素(多边形、线、点等)和状态(光照、材质、阴影等)的编程提供标准化接口,能够更加快速、便捷地创建高性能、跨平台的交互式图形程序[12]。由于OSG不仅具有场景及其参数设定简单的特点,而且具有优化渲染的功能,因此本文的虚拟视景仿真系统是基于OSG的技术进行场景和目标模型的生成、场景驱动、场景渲染、碰撞检测等。
2.1 场景和目标建模
在构建场景模型时需要与该场景的实际地形影像相互匹配。本文建立的场景模型的建模精度不低于0.5 m,为此采用Google Earth中的公开数据和高程数据为建模数据源,建立了与实际环境中相似的玉米地、大豆地、树木、路旁草丛、河流、道路及光照等,结果如图2所示。

图2 场景示意图
坦克目标模型分为可见光模型和红外模型。其中可见光模型的主要建立步骤:构建线框几何体(点、线、面),确保模型几何结构与实际目标一致。为各个几何面添加纹理/材质,在与实际目标一致的线框几何体基础上添加,使得模型具备与目标一致的可见光外观。
红外模型的主要建立步骤:
1) 在可见光模型基础上,针对模型各个面所使用的纹理图片进行材质分类,如油漆、玻璃、装甲钢等不同材质,并保持相应材质分类结果;
2) 导入各种材质的红外光谱特性数据,并结合实际红外环境、传感器效益,通过热辐射计算得到目标的红外特征。
实际仿真系统中,还可以对坦克目标进行数学建模,如坦克目标的运动模型、武器威力等,并结合实际作战任务和战场态势进行计算,得到坦克目标的运动、攻击等实体属性状态。
通过以上步骤,可以得到坦克目标模型如图3所示。
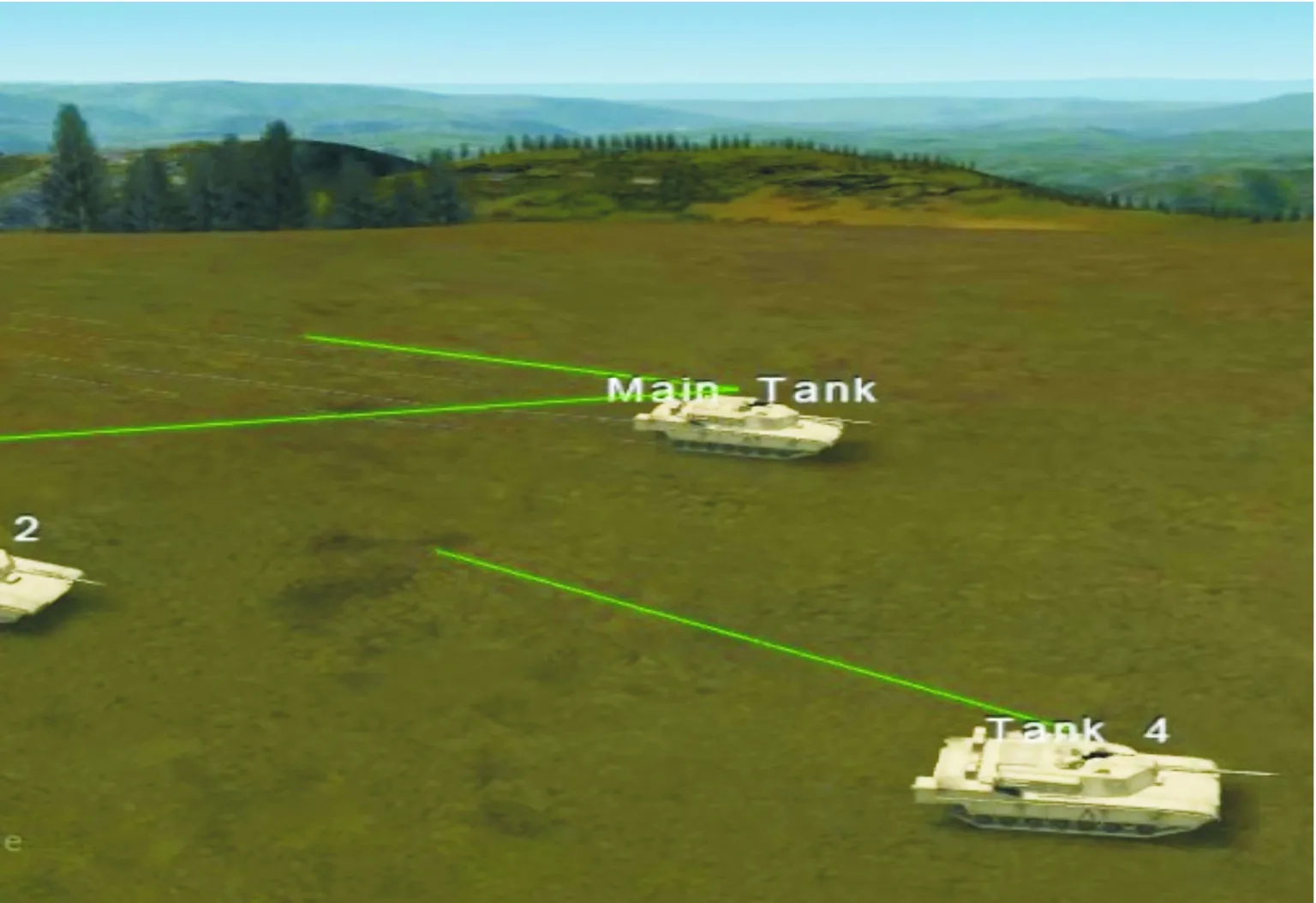
图3 目标模型示意图
2.2 场景驱动
场景驱动的功能主要接收用户提供的目标和传感器运动和姿态效果参数。单个仿真场景中用户可输入如下2个数据文件:
1) 目标的运动和姿态数据文件,可提供目标随仿真时间,坐标和姿态变化数据;
2) 传感器的运动和姿态数据文件,可提供传感器随仿真时间,坐标和姿态变化数据。
目标运功和姿态数据文件、传感器运动和姿态数据的初始化数据输入顺序格式的样例如表1所示。文件中每行数据代表仿真运行时刻的目标或传感器运动和姿态数据,包括x、y、z坐标,朝向角,俯仰角、翻滚角。
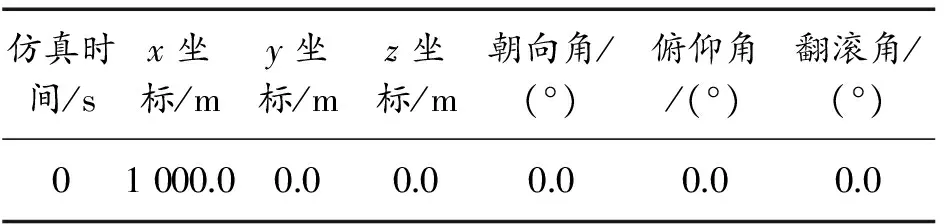
表1 初始化数据
2.3 场景渲染
一个场景图形系统应允许保存几何体并执行绘图遍历,此时所有保存于场景图形中的几何体以OpenGL 指令的形式发送到硬件设备上。为实现动态几何体更新,拣选,排序和高效渲染,场景图形一般需要遍历如下3种操作:
1) 更新:更新遍历(也称程序遍历)允许程序修改场景图形,以实现动态场景。更新操作主要由程序或者场景图形中节点对应的回调函数完成。例如,在飞行模拟系统中,程序可以使用更新遍历改变一个飞行器的位置,或者通过输入设备实现与用户的交互。
2) 拣选:在拣选遍历中,场景图形库检查场景里所有节点的包围体。如果一个叶节点在视口内,场景图形库将在最终的渲染列表中添加该节点的一个引用。此列表按照不透明体与透明体的方式排序,透明体还要按照深度再次排序。
3) 绘制:在绘制遍历中(也称作渲染遍历),场景图形将遍历由拣选遍历过程生成的几何体列表,并调用底层API,实现几何体的渲染。
绘制遍历中,渲染引擎将经过拣选遍历得到的几何体,安装场景树的结构进行组织遍历并对每个几何体状态进行刷新。整个场景树类似于一颗倒置的树,从场景根节点开始,各个几何体按照父子关系组织聚合,如场景根节点挂载地形子节点,地形子节点挂载导弹、坦克等子节点。引擎对各个几何体进行空间几何位置变换、属性外观等进行更新,并通过显卡GPU渲染管线处理得到相应显示信号输出到显示设备,如图4所示。

图4 渲染场景图形遍历
2.4 碰撞检测
通常,碰撞检测算法包括基于射线的检测、基于BSP树的检测、一般层次检测、基于OBBTree的碰撞、基于k-DOPTree的检测,虽然此类技术敏感度较高,但存在运行效率不稳定,算法复杂等缺点[13]。为了简化碰撞检测算法,采用基于“射线/体”的交运算完成OSG场景元素碰撞检测。在OSG中,交运算主要封装在osgUtil工具库,该库提供的一条线段与场景中集合对象相交的检测,主要包含如下内容:
1) osgUtil::LineSegmentIntersector。该类提供一种定义射线的方法,可以定义线段的起点、终点。用于检测指定线段与场景中图形节点之间的相交情况。
2) osgUtil::IntersectorVisitor。相交测试节点访问器,该类继承自osg::NodeVistor类,需要维护一个进行交集测试的线段列表,主要用于遍历场景中与指定几何体相交的节点。
3) osgUtil::IntersectorGrou。该类可以创建一个线段组,将LineSegmentIntersector提供射线实例加入到一个组中。
在OSG进行“射线/体”的交运算相交测试,首先创建一个交集访问器,然后创建两条线段(一条代表视点前进方向线,一条代表与z轴垂直的直线),并把这两条线段加入交集访问器,最后使这两条线段跟随交集访问器遍历场景层次,开启交集检测进行判断。具体流程如图5所示。
在对典型导弹武器系统进行碰撞检测时选择导弹弹体近似线段作为研究对象,如图6所示。由于坦克和导弹弹体都是几何体,在进行碰撞检测时,如果使用两个几何体直接进行碰撞检测,所需计算量较大,难以满足实时性的需求,因此需要对导弹模型进行简化。导弹可近似等效为沿弹轴方向,与导弹等长的线段,由于其击中点的位置,角度等信息基本和导弹本身是一致,因此碰撞检测结果精度损失通常在可接受范围内,但该简化方法能大幅提高碰撞检测的效率,可满足实时性需求。

图5 碰撞检测流程

图6 导弹击中坦克过程
经过用线段代替导弹模型的简化后,使用OSG的线段碰撞检测类LineSegmentIntersector进行导弹与目标的碰撞检测。首先在仿真的每一帧得到当前导弹的位置,姿态信息,进而计算出弹头,弹尾坐标,根据这两个坐标获得等效线段,最后将该线段与目标进行碰撞检测,若检测到与目标碰撞,则计算出碰撞点,查询目标数据库获取当前击中的部位,据此部位即可得到毁伤数据。
3 仿真实验
本文对系统的仿真效果进行了仿真实验验证。硬件平台为双CPU Xeon E5-2687,内存32GB DDR3-1600,显卡NVIDIA Quadro K5600 4GB,硬盘480GB 固态SAS,显示器分辨率7 680×1 080(4台组合后)。主程序弹道干扰仿真实验验证结果如表2所示。
在本文所述的虚拟仿真实验主程序中,采用的计算步长为0.01 s,因此计算帧频为100帧/s,所以在虚拟仿真实验时,将最后输出图像渲染的帧频在100帧每秒范围内进行仿真实验验证。虚拟仿真实验分别选取了内陆和海洋两种地区,天气情况分别在不同的地区择了晴、小雨、中雨、雾等,并加载了1类干扰、2类干扰两种干扰类型,仿真结果表明:
1) 在天气为晴天,加入1类干扰后,内陆地区和海洋地区的着靶位置和渲染帧频一样,说明地区对仿真结果影响不大;
2) 在不同的天气情况下,碰撞检测灵敏度、置信度、渲染帧频分别达到了95%,85%,25帧以上,说明该仿真系统具有很好的天气适应能力;
3) 当环境为晴天、内陆时,加入不同的干扰类型,渲染帧频为25帧以上,说明干扰类型对该仿真系统影响不大。
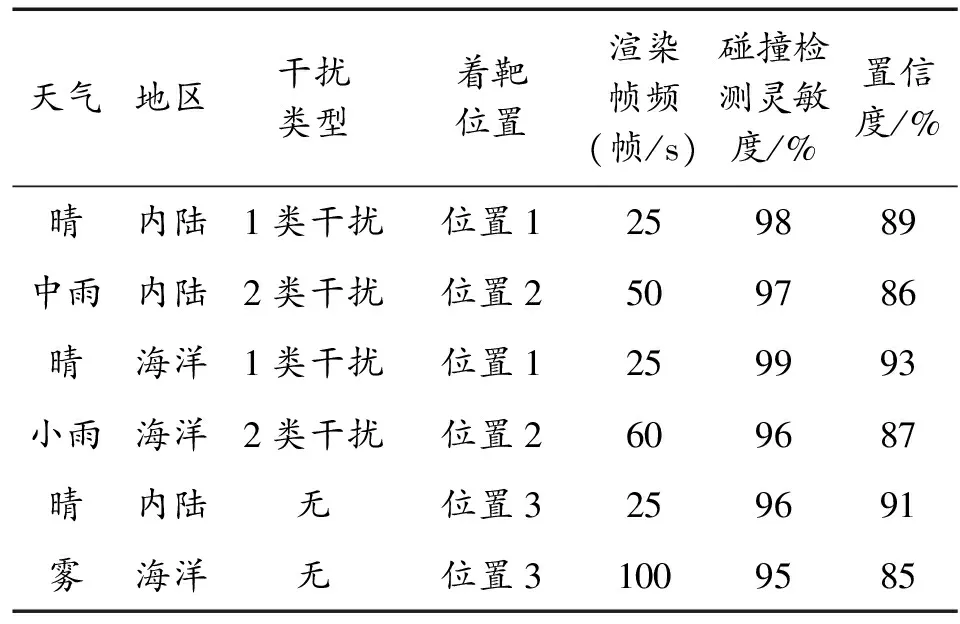
表2 主程序弹道干扰仿真实验验证
4 结论
提出了一套基于OSG技术的虚拟视景系统,虚拟仿真实验结果表明:该系统对复杂天气、地区和干扰类型均具有较好的适应能力,可为军事模拟尤其是目标打击模拟提供一种成本低、可行性强的方法。
[1] 林奕,闫杰,钟都都,等.一种新的视景仿真软件体系结构[J].西北工业大学学报,2008(2):184-188.
[2] WANG G,WANG Z,XIE M,et al.An Edge-Preserving Variational Restoration Method of Blurred Image Corrupted by Poisson Noise[J].Journal of Optoelectronics Laser,2007,18(3):359.
[3] 彭国圣,苏洪潮,李续武.基于Vega的某空地导弹视景技术研究[J].战术导弹技术,2003(5):63-67.
[4] 田会,倪晋平,蔡荣立,等.用于弹道测量的实时测速同步触发仪设计[J].光学技术,2011(3):327-331.
[5] 阎东,雷志勇.外弹道高速目标参数验证算法研究[J].光学技术,2007(6):816-818.
[6] YAO L,KANG F,Zhang S,et al.The Key Technologies of Component-Based Surface Warfare Scene Simulation System:Computational Intelligence and Software Engineering (CiSE)[C]//2010 International Conference on,2010.
[7] 郑玉航,于海燕,杜雅秀.视景仿真技术在军事领域中的应用[J].国防技术基础,2003(4):12-14.
[8] 王晓明,黄卫权.典型导弹视景仿真系统研究与实现[D].哈尔滨:哈尔滨工程大学,2012.
[9] 李军华.弹道导弹视景仿真技术的研究[D].成都:电子科技大学,2012.
[10]胡涛,李阔.视景仿真技术应用研究[J].光电技术应用,2004,19(3):36-40.
[11]于海凤,邢桂芬,张凯.虚拟现实技术在视景仿真系统中的应用[J].计算机工程与设计,2006,27(6):1108-1110.
[12]万红坡,席庆彪,田雪涛.基于 OpenSceneGraph 的无人机雷达载荷视景仿真应用研究[J].计算技术与自动化,2011,30(3):42-46.
[13]邹益胜,丁国富,许明恒,等.实时碰撞检测算法综述[J].计算机应用研究,2008,25(1):71-74.
[14]李正优,郭留河. 车载导弹海上射击视景仿真研究[J].四川兵工学报,2015(6):25-28.
(责任编辑 周江川)
Application Study on Virtual View System in a Guided Weapon
LUO Qiang, LIANG Chao, LYU Hong-peng, SUN Wei-ping, SONG Zhe, ZHANG Xi-jing, REN Meng, WU Jiang-peng
(Xi’an Institute of Modern Control Technology,Xi’an 710065, China)
Because traditional real equipment of one type guided weapon has some disadvantages such as high training cost, short life and low safety coefficient, a virtual view system is proposed and some key technologies are introduced. It includes the establishments of virtual battleground and scene render by using OSG technology, environment model’s setup by Google Earth database as well as collision detection and target spot judgement based on the intersection calculation between ray and geometry. Virtual experiment about anti-tank missile hitting the targets is carried out through the system. The results shown that the confidence coefficient of the virtual system reaches up to 85% under different conditions of sunny, low rain, moderate rain, fog weather, area and interference type. It provides a solution with low cost and strong feasibility for military simulation, especially at target attack simulation.
information optics; guided weapon; virtual scene view; simulation modeling; OSG
2016-12-22;
2017-01-20 作者简介:骆强(1980—), 男,高级工程师,主要从事虚拟试验与仿真研究。
10.11809/scbgxb2017.05.007
format:LUO Qiang, LIANG Chao, LYU Hong-peng, et al.Application Study on Virtual View System in a Guided Weapon[J].Journal of Ordnance Equipment Engineering,2017(5):31-34.
TG156
A
2096-2304(2017)05-0031-04
本文引用格式:骆强,梁超,吕鸿鹏,等.虚拟视景系统在制导武器中应用研究[J].兵器装备工程学报,2017(5):31-34.
猜你喜欢
汽车实用技术(2022年11期)2022-06-20
计算机仿真(2022年1期)2022-03-01
汽车工程师(2021年12期)2022-01-17
小学生学习指导(高年级)(2021年5期)2021-05-18
齐齐哈尔大学学报(自然科学版)(2021年3期)2021-04-19
火力与指挥控制(2020年2期)2020-04-02
铁道通信信号(2020年10期)2020-02-07
小学生学习指导(低年级)(2019年3期)2019-04-22
小学生学习指导(低年级)(2018年12期)2018-12-29
计算机测量与控制(2018年7期)2018-07-27
