
UWB室内定位测站布设PDOP值分析
2017-06-10 07:22:23彭逸凡李广云李明磊
导航定位学报 2017年2期
彭逸凡,李广云,王 力,李明磊
(信息工程大学 导航与空天目标工程学院,郑州 450001)
UWB室内定位测站布设PDOP值分析
彭逸凡,李广云,王 力,李明磊
(信息工程大学 导航与空天目标工程学院,郑州 450001)
针对UWB高精度室内定位技术在相同环境中的定位精度差异问题,提出利用PDOP值来分析布设测站标签的方法。仿真不同测站布设情况下的PDOP值分布,利用实验验证不同测站布设下测距精度的变化,并加入人员扰动干扰,分析测站布设的合理性与系统稳定性,论述了通过合理根据室内环境优化测站布设,达到一定程度上提升测距定位精度的效果,最后指出了存在的问题和值得进一步研究的方向。
室内定位;PDOP;测站布设;精度分析;超宽带
0 引言
近年来,随着定位技术的飞速发展,人类日常活动时间超过70 %的室内环境成为了定位技术研究和应用的新目标。目前市面上已经出现了基于无线保真(wireless fidelity,WiFi)、红外、蓝牙、紫蜂协议(ZigBee)和超宽带(ultra wideband,UWB)等技术的室内定位系统。跟其他技术相比,UWB技术拥有高容量、高刷新、高精度等优势。利用UWB技术在通视条件下测距精度从最初的20 cm逐渐提升到10 cm、1 cm,甚至在一定条件下定位精度可提升至mm级。UWB信号传播过程中的多径和非视距现象是影响直达路径估计、造成定位精度下降的2大主要原因[1]。大多数相关研究将精度提升的重点放在对标签信号的预处理分析和非视距环境中的信号检测等上面[2],对于测站节点布设的研究并不多见,有也往往仅局限于仿真分析[3]。因而系统在布设测站节点标签时,通常将节点布设于矩形测区的4个角上,这也成为室内定位系统应用和研究中普遍使用的测站布设方法。
几何精度衰减因子(position dilution of precision,PDOP)从本质上来说就是位置精度强弱度。在卫星定位系统中,PDOP值的大小反映了卫星终端分布的良好性[4]。不同定位系统星座设计不同,对测区内各测量点的DOP值会产生影响,较小的DOP值往往能获得较高的定位精度[5]。本文通过仿真分析室内定位系统中测站分布的PDOP值,提出测站布设的优化思路,以期提高测量点的测距精度。
1 PODP值解算模型
传统意义上的PDOP值是估计卫星系统定位精度的一种常见指标[6]。设i(i=1,2,3,…,n)个定位节点对j(j=1,2,3,…,m)个待测节点进行UWB信号距离测量,相应所得测量观测值为Rij,其中定位节点的数量不小于3个。假设定位节点坐标为(xi,yi,zi),待测节点坐标为(xj,yj,zj),令ρ=(xi-xj,yi-yj,zi-zj),则距离观测方程为
(Rij+ΔRij)2=ρρT。
(1)
求观测伪距对于坐标轴X、Y、Z的方向余弦可得:
(2)
(3)

(4)
对于第j个由伪距观测的线性观测方程,可以列出矢量表达式
l=AX+V。
(5)
式中:
其中V为观测值与标准值的残差向量,该向量中的每一个值为单次观测值与其标准值的残差。
单点定位的精度评定中,假设观测值均为独立不相关且具有相同的方差σ2,则解得误差协方差阵为
(6)
式中:qij表示第i个观测量与第j个观测量的协方差。由式(6)可得位置精度衰减因子

(7)
2 PDOP值仿真解算
以4个测站节点距离交会测算待测节点的位置为例。在5m×10m的范围内,分别布设4个测站节点。其中第1组4个测站节点(即矩形的4个顶点)的坐标分别为S1(0,0,0)、S2(0,10,0)、S3(5,0,0)、S4(5,10,0),第2组4个测站节点(即矩形4条边的中点)的坐标分别为H1(2.5,0,0)、H2(5,5,0)、H3(2.5,10,0)、H4(0,5,0)。以0.1m为步长,在仿真区域内对2组设站情况进行PDOP值对比分析,得到PDOP值的分布如图1、图2所示。
由图1可知,在仿真区域中间成纺锥形的部分第2组设站方案的PDOP值优于第1组,灰色区域约占整个区域的三分之一。为了更好地分析第2组设站方案在仿真区域的PDOP值,对于第2组设站PDOP值小于1.5、2的情况分别进行了仿真,所得结果见图3、图4。
通过对比可以看出图像中间的PDOP值相对较小,往仿真区域四周移动时PDOP值在加速增加,在靠近仿真区域的边界过程中,顶点处会出现PDOP值大于2的情况。
仿真区域内2组测站节点不同设站情况下的PDOP均较为良好。第1组在仿真区域内PDOP值均小于2,第2组在边缘处出现PDOP值超过2的情况,但在中间区域的PDOP值优于第1组。
最后对仿真区域PDOP均值做统计,第1组PDOP值均值为1.30,第2组PDOP值均值为1.56。
3 实验与结果分析
为了更好地解算PDOP值和定位标签测距定位的精度,采用全站仪在室内布设了4个测站点。选择了4.8m×4.8m的室内环境,节点间相对位置与2组仿真实验组保持一致,分别为:第1组测站点布设在测区4个顶点,该布设方案为商用室内定位系统测站布设的常规方案;第2组测站点布设在测区4边中点,仅对二维空间中的精度进行比较。实际测量所得坐标值见表1。

表1 测站点坐标分布 m
借助测区的辅助符号在测区范围内选取3个特征点进行观测:T1(0.603,2.398,0)、T2(2.403,2.402,0)、T3(4.205,4.203,0),在测区内位置见图5,仅对二维空间的精度进行分析。
根据2组测站布设方案所示,对3个特征点进行测距实验。为了更好地模拟室内实际环境,在正常观测后加入了人员走动干扰项,又分别对2组进行无干扰和有人员走动干扰的比较测试。在每个点位均进行了2 000次以上的实验,通过数据统计分析得到的结果如表2~表5所示。
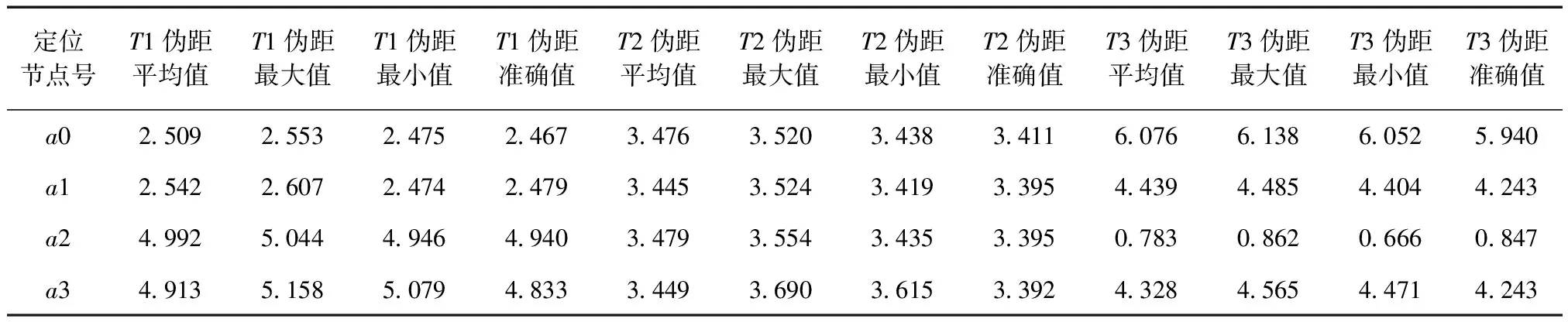
表2 第1组无干扰测距数据 m
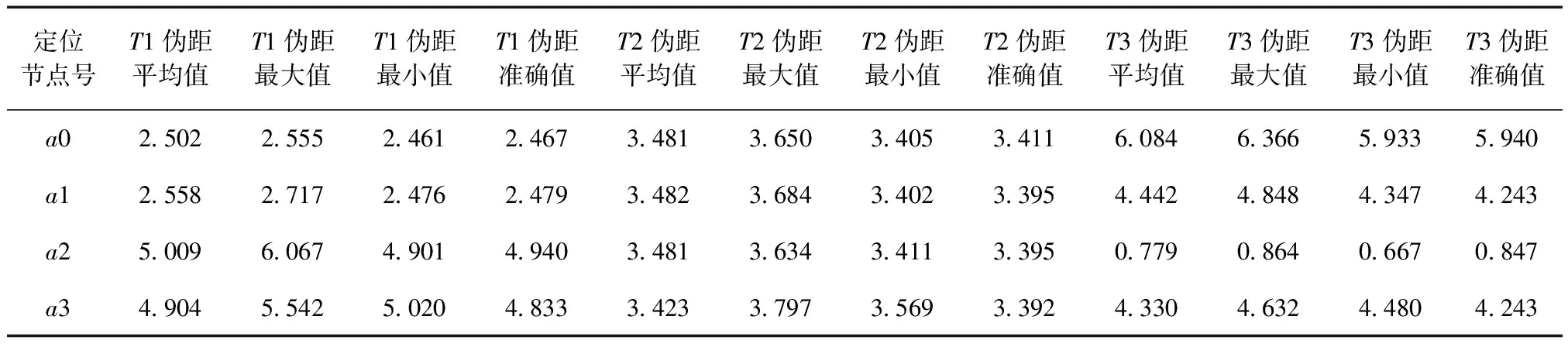
表3 第1组有干扰测距数据 m

表4 第2组无干扰测距数据 m
通过实测数据比较分析可以发现,在未加入干扰时2组测距精度相对稳定在8 mm之内,符合理论预期;但当测站与待测节点间距离较近或者较远时,测距误差会出现一定程度的放大,呈现出一定的不稳定性。第2组对测区中部特征点T2的测距精度明显优于第1组的情况,且对于靠近测区边界点的特征点T3除较远处测站测距误差呈现不稳定外,其余测距值均相对良好。
在加入了人员走动干扰项后,测距的波动范围有了明显变化,极值都基本比未加入干扰项时更加远离了准确值。2组测站分布情况下的测距误差也有明显变大,且测程较近时被干扰的几率小于测程较远时。
根据3个特征点坐标,将其对应的DOP进行计算可得:DOP1T1=1.2445、DOP1T2=1.118、DOP1T3=1.2221;DOP2T1=1,4336、DOP2T2=1.118、DOP2T3=2.6792。再通过迭代算法[7],计算出2组测站分布有无干扰条件下的特征点坐标,特征点对应精度评定如表6所示。
数据表明,在相同实验条件下,DOP值的大小反映了坐标精度的精确性。在有人员扰动加入后,第2组的测站布设方案稳定性更好。

表6 特征点精度评定 m
4 结束语
本文通过对模型仿真和测站实测的解算,较好地反映了UWB室内定位在不同测站设置情况下测区内PDOP值空间分布情况和测距精度的稳定性。从DOP值的大小可以看出当存在有人员活动干扰时,第2组均值方差波动相对较小;因而合理设站有利于系统的稳定性。此外由于室内环境中靠近四周的空间里多摆放室内物件,人员活动相对集中于室内环境中部或距离四周墙壁一定距离的空间[8-11],因而在一定条件下第2组设站方案的PODP值分布更有利于实际测距定位。
目前仅仅针对二维平面环境进行了仿真和实验解算,测站布设也只选取了2种特殊情况进行分析,因而存在一定的局限性。下一步研究可从室内定位三维环境以及多样化的测站数量、方式上进行研究。
[1] OURDAN D, DARDARI D, WIN, M Z. Position error bound for UWB localization in dense cluttered environments[J]. IEEE Transactions on Aerospace and Electronic Systems,2008, 44(2): 613-628.
[2] 蒙静,张钦宇,张乃通,等.IR-UWB定位系统距离误差建模及性能研究[J].通信学报,2011,32(6):10-16.
[3] 王雪延.基于UWB基站配置的室内定位研究[D].西安:西安电子科技大学,2014:33-41.
[4] 范百兴,李广云,李佩臻,等.激光干涉测量三维点坐标的PDOP模型研究和应用[J].测绘通报,2015(11):28-31.
[5] 杨开伟,黄劲松.卫星导航系统定位精度评估[J].海洋测绘,2009,29(4):26-28.
[6] 潘林,蔡昌盛,罗小敏,等.一种顾及权重的PDOP值计算方法[J].测绘科学技术学报,2014,31(3):236-239.
[7] 邹金平.超宽带室内定位研究[D].昆明:昆明理工大学2008:33-35.
[8] 杨楠.基于UWB的矿井人员定位系统设计[J].物联网技术,2015(2):20-21.
[9] 朱永龙.基于UWB的室内定位算法研究与应用[D].济南:山东大学,2014:49-60.
[10]段宏宇.密集多径环境下UWB无线传感器网络节点三维定位方法研究[D].长春:吉林大学,2015:39-46.
[11]童凯翔,周轩,李广侠,等.超宽带在无线定位技术中的应用综述[J].导航定位学报,2015,3(1):10-14.
PDOP analysis of station setting for UWB indoor positioning
PENGYifan,LIGuangyun,WANGLi,LIMinglei
(School of Navigation & Aerospace Engineering, Information Engineering University, Zhengzhou 450001, China)
In order to improve the accuracy of UWB indoor positioning, the paper proposed the method that uses PDOP values to analyze the tag setting of the survey station: the PDOP value distribution was simulated and the difference of measurement accuracy was verified in the condition of different station layout, then the rationality and stability of the setting station system was analyzed by adding a perturbation term.Finally, it was indicated that the optimization of setting station according to the indoor environments could promote the positioning accuracy to a certain extent.
indoor positioning; PDOP; station setting; accuracy analysis; UWB
2016-08-26
现代城市测绘国家测绘地理信息局重点实验室开放基金项目(20141201WY);信息工程大学优秀基金课题(201510)。
彭逸凡(1992—),男,四川眉山人,硕士研究生,研究方向为室内定位技术等。
彭逸凡,李广云,王力,等.UWB室内定位测站布设PDOP值分析[J].导航定位学报,2017,5(2):103-106.(PENG Yifan, LI Guangyun, WANG Li,et al.PDOP analysis of station setting for UWB indoor positioning[J].Journal of Navigation and Positioning,2017,5(2):103-106.)
10.16547/j.cnki.10-1096.20170218.
P228
A
2095-4999(2017)02-0103-04
猜你喜欢
军事文摘(2023年4期)2023-04-05 13:57:35
地理空间信息(2022年11期)2022-11-26 05:47:02
山东煤炭科技(2022年6期)2022-07-14 03:10:40
河北地质(2021年4期)2021-03-08 01:59:14
中国铁道科学(2019年5期)2019-10-19 07:55:14
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年4期)2018-11-25 09:47:22
测绘通报(2018年10期)2018-11-02 10:07:28
测绘学报(2018年10期)2018-10-26 06:12:16
城市勘测(2018年1期)2018-03-15 03:37:02
