
基于ICF和多级分类器的交通标志检测*
2017-06-09 08:53:29郑天宇
传感器与微系统 2017年6期
郑天宇, 王 年, 唐 俊
(安徽大学 电子与信息工程学院,安徽 合肥 230601)
基于ICF和多级分类器的交通标志检测*
郑天宇, 王 年, 唐 俊
(安徽大学 电子与信息工程学院,安徽 合肥 230601)
针对传统的基于积分通道特征(ICF)和Adaboost交通标志检测算法,召回率过低和误检率过高的问题,提出了一种两阶段交通标志检测方法。第一阶段对ICF进行谱聚类并结合Adaboost算法学习得到目标感兴趣区域(ROI);第二阶段对所获得的感兴趣区域进行直方图均衡化,利用尺度不变特征变换(SIFT)描述子与支持向量机(SVM)分类器相结合,提高了目标区域检测的准确性。通过德国交通标志数据集(GTSDB)的验证,结果表明:采用SICF-Adaboost +SIFT-SVM构建的交通标志级联分类器检测算法相对于传统的ICF-Adaboost算法召回率高且误检率低,适用于真实场景下的交通标志检测。
交通标志检测; 形状分类器; 谱聚类; 积分通道特征; 感兴趣区域
0 引 言
作为辅助驾驶系统中重要组成部分,交通标志识别能够给司机提供关于道路安全的预警信息。道路交通标志识别主要涉及两个问题:交通标志检测和交通标志分类。标志检测意味着在输入图像空间中准确定位交通标志,而标志分类是将其划分到特定的交通标志子类型中。因此,标志检测是标志识别的前提和基础。
交通标志由于具有颜色和形状信息便于人们在道路交通环境中将其与周围的背景区分开。在颜色特征识别,主要指基于不同颜色空间的阈值分割方法将感兴趣的颜色分割出来,包括RGB空间,HSV空间,HSI空间等。基于形状的方法包括Hough变换和Zernike不变矩。文献[1]采用由粗到精的滑动窗口方案,即先通过小尺度窗口粗略地检测交通标志图像得到感兴趣区域(region of interest,ROI),然后再通过大尺度窗口对目标ROI进行精检。文献[2]利用颜色概率模型将源图像转换成概率图,并在概率图上运用区域特征提取(MSER)算法得到ROI,最后结合积分通道特征检测器进行精检以提高检测准确率。文献[3]结合聚类特征和Adaboost算法对车辆进行检测,并通过采用多分辨率模型提升检测率。基于此,本文提出了一种两阶段的交通标志谱检测方法,包括SICF检测器阶段和SVM形状分类器阶段。
1 基于谱聚类特征的粗检
1.1 ICF
ICF由Dollar P等人在2009年提出[4],从特征描述的角度来探讨解决问题的可能性。ICF是通过积分图对输入图像的各种通道特征进行快速计算。典型通道类型包括强度、颜色、积分直方图、梯度直方图、线性滤波和非线性滤波。本文只考虑一阶特征,即对给定通道上矩形框内所有像素的像素值进行求和运算。首先通过随机选取通道类型和矩形框的大小产生一个候选特征池,然后结合Boosting算法和软级联分类器学习选择这些特征。采用LUV颜色空间、梯度直方图、梯度大小的组合作为通道特征。GTSDB数据库上“限速20”的通道类型选择如图1所示。交通标志的ICF计算流程如下:
1)对输入图像创建10个和源图像相同大小的浮点矩阵,即通道类型。
2)对源图像进行灰度转换,并分别计算灰度图像的梯度方向和梯度幅值。
3)将梯度方向分别离散化到6个区间,通过梯度幅值分别向6个方向通道进行投票。
4)对梯度幅值进行复制并创建幅值通道特征,同时计算LUV通道特征。
5)分别对这10个通道进行积分操作,并输出最终的ICF。
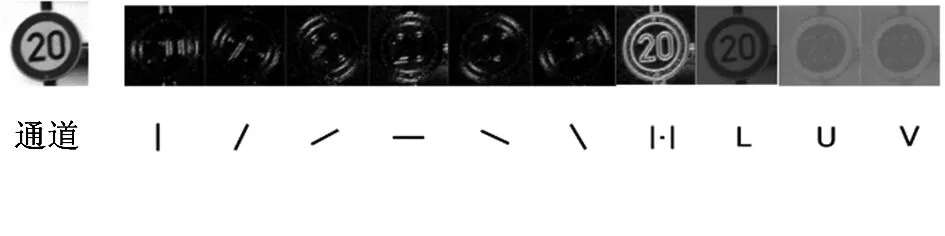
图1 交通标志图像的通道类型选择示例
1.2 特征聚类
交通标志本身一般都含有大量的类内变化,这给交通标志检测带来了挑战。本文对训练数据的颜色和梯度特征进行聚类,通过聚类学习得到一个整体的模型[5],可以有效地处理物体遮挡以及方向变化等造成的问题。采用的谱聚类算法具体过程描述如下:
输入:数据样本集,尺度参数集, 聚类个数K;
输出:聚类结果。
1)获取给定训练样本的ICF特征描述子,然后选取高斯核函数计算任意样本数据xi和xj之间的相似度并得到相似度矩阵W∈Rm×n,Wij=exp(-‖xi-xj‖2/2σ2)为相似度矩阵中的元素,其中,σ为尺度参数。
2)根据度矩阵D来构建标准化图拉普拉斯矩阵L=D-1/2WD-1/2,其中度矩阵D是由相似性矩阵Wij计算得到,即将Wij的每一列元素相加得到的数作为度矩阵主对角线元素(其他位置上的元素均等于0)。
3)对矩阵L进行特征值分解,并计算前k个特征值对应的特征向量,得到矩阵X=[x1,x2,x3,…,xk]。
5)将矩阵Y中的每一行看作为k维空间中的一个向量,并应用c-means经典聚类算法对训练样本的ICF向量进行聚类,并输出聚类结果。
1.3 基于谱聚类特征的SICF检测器实现
针对自适应谱聚类后的ICF,本文运用Adaboost算法[6]学习一个2层决策树进行分类判别,其中每个节点是一个简单的树桩分类器。树桩分类器由矩形区域,通道类型和阈值共同决定。通过不断增加弱分类器的数量来执行4个回合(32,128 ,512 ,2 048)的训练,训练完成后将若干个不同的弱分类器进行线性加权组合得到最终的强分类器。训练开始时,有5 000个正样本和5 000个负样本,在每个回合中将较难分类的负样本再加入到负样本训练集中重新进行训练。由于树桩的数目比较大,采用随机抽样子集训练分类器,最后该特征池随机抽样总共产生30 000个候选矩阵。
2 基于SVM的形状分类器精检
为了达到较高的检测准确率,需要在第一阶段提取目标ROI中保持较高的召回率。这使得提取后的ROI中包含大量的假阳性区域。为了滤除这些假阳性区域,结合交通标志规则的形状信息并运用SVM训练形状分类器,在第二阶段将形状不规则的干扰区域排除,以进一步去除误检标志。
2.1 直方图均衡化处理
在自然环境中,由于存在光照强度不同、雾霾天气等因素的影响,导致第一阶段提取的ROI存在亮度过低或者背景与前景对比不明显的交通标志图像,所以,需要对候选ROI进行直方图均衡化的预处理操作[7],通过扩大图像中背景与前景灰度值的差别以提高图像对比度,从而获得更清晰的图像轮廓,其结果如图2所示。
2.2SIFT-SVM去除误检
基于尺度空间的SIFT[8],对图像尺度缩放,空间旋转,光照强度变化以及仿射变换都具有很强的鲁棒性。SIFT已经被证明是目前匹配性能最好的方法之一。通过检测尺度空间极值准确定位关键点的位置,这些关键点通常包含进行特征匹配的重要信息。本文选取SVM作为分类器,通过非线性映射将输入空间向量x映射到高维空间中,在高维空间中确定能够正确划分数据集的最优决策函数。在第二阶段使用SVM形状分类器的目的是有效地去除在第一阶段被错误地认为是交通标志的区域。SIFT局部描述子与SVM分类器的结合可以有效地去除误检[9]。训练阶段,从正负样本中提取128维的SIFT局部特征描述子,然后将提取后的SIFT局部特征送入线性SVM分类器中进行训练。检测阶段,提取待检测样本的SIFT特征,然后将其传递到训练好的SVM二分类器中。如果输入为正样本,则输出为+1;反之,则输出为-1。
2.3 形状分类器设计
本文建立4个形状(三角形、倒三角形、圆形、菱形)分类器。4个分类器训练结束后,每一个输入ROI的局部特征描述子在这4个分类器上都有一个输出结果。如果待输入的区域为交通标志,则输出为1;否则,为-1。然后,对这4个输出结果进行投票选择,即将输出结果相加。只有当投票结果为-2时,表示4个分类器中有一个输出为1,即输入的ROI属于这个分类器的形状,而其他3个形状分类器的输出结果都为-1,不属于其余3个分类器时,才判定为交通标志;其它的情况将判定为噪声区域,并将其滤除。
3 交通标志检测算法实验与分析
3.1 实 验
本文采用的是GTSDB。在第一阶段ICF检测器的训练中,正样本选取的是GTSDB中的600张交通标志图像,每张图像为1 360像素×800像素;负样本选取Inria行人数据库中1 300张图像。在第二阶段4种形状分类器的训练中,正样本选取来自GTSRB中4×500张交通标志图像,其中每个形状的样本数为500;负样本选取Inria行人数据库中500张图像。本文采用有监督学习,将正样本标签置为1,负样本标签置为-1。 这样对于每一个分类器都有2 500张训练样本(正样本500张、负样本2 000张)。训练前需要对每张图像进行归一化处理,每张图像被调整为64像素×64像素。测试图像选取GTSDB测试集,均为自然环境下高速公路和城市道路上采集的图像,共300幅。训练测试流程图如图3所示。
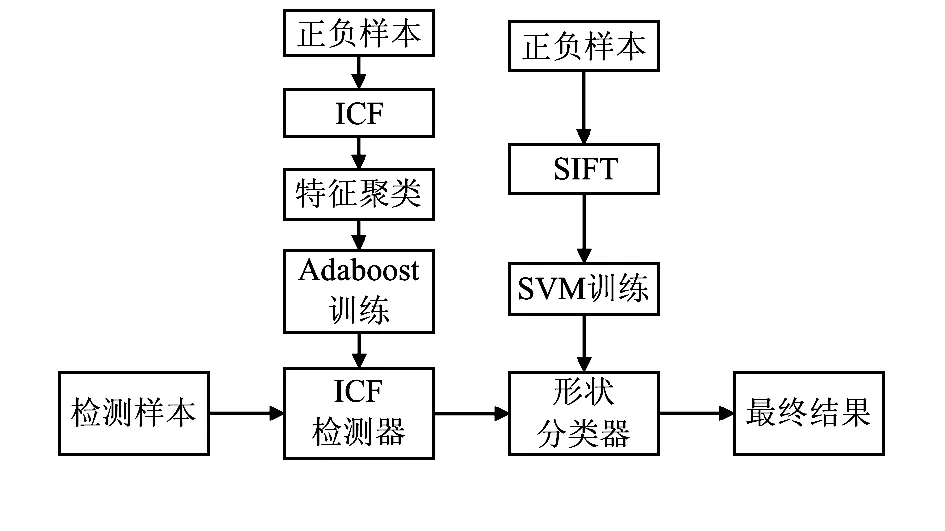
图3 训练测试流程
用于交通标志检测器性能评价的实验平台为戴尔工作站,其主要配置为:Intel(R)Core(TM) i7-3770 CPU @ 3.40 GHz的处理器,8 G内存,操作系统为Windows 7,编程软件为Matlab 2015a。
3.2 实验结果与分析
为了验证本文提出算法的有效性,在采用相同的训练样本和测试样本情况下,分别采用ICF-Adaboost[4],SICF-Adaboost[3],SICF-Adaboost+SIFT-SVM(下面分别称为算法一、算法二和本文算法)3种不同的算法,进行对比实验。选取分类器检测率RD和误检率RF作为评价指标,其中RD=Tp/Ap,RF=Fp/As,Tp为正确识别交通标志数;Ap为总交通标志数;Fp为错误识别交通标志数;As为总样本数。
3种不同算法在GTSDB测试数据集上的标志检测结果分别如表1所示。可以看出:在检测率方面算法二低于算法一。因为SICF-Adaboost算法在训练之前对训练数据的ICF特征进行谱聚类能够有效提高检测率。将本文算法与算法二进行比较可知,检测率相同,但是本文算法误检率小于算法二。这是由于本文算法增加了基于SVM的形状分类器设计阶段,对第一阶段的候选目标区域进行了精检,有效地降低了误检率。测试所用的图像分辨率为1 360像素×800像素。图4分别给出了3种不同算法的ROC曲线图,从中可以看出:基于SICF-Adaboost+SIFT-SVM检测算法有着最佳的交通标志检测效果。图5为本文算法在复杂场景下的检测结果,其中正确检测到的交通标志用矩形框框出。

表1 交通标志检测结果

图4 3种算法的ROC曲线

图5 不同实景下的交通标志检测结果示例
4 结束语
为了解决传统基于ICF-Adaboost交通标志检测算法检测率过低的问题,提出了SICF-Adaboost+SIFT-SVM两阶段的级联分类器。实验结果表明:本文算法能够正确确定标志位置并将其切割出来,同时,对光照、天气变化等因素带来的影响有较好的抑制作用。另外,对比4种形状类别的检测结果,发现倒三角形的检测率较低,如何提高倒三角形交通标志的检测率,将是下一步研究工作的重点。
[1] Wang G,Ren G,Wu Z,et al.A robust,coarse-to-fine traffic sign detection method[C]∥International Joint Conference on Neural Networks,IEEE,2013:1-5.
[2] Yang Y,Wu F.Real-time traffic sign detection via color probabi-lity model and integral channel features[C]∥Pattern Recogni-tion,2014:545-554.
[3] Ohn-Bar E,Trivedi M M.Learning to detect vehicles by cluste-ring appearance patterns[J].IEEE Transactions on Intelligent Transportation Systems,2015,16(5):2511-2521.
[4] Dollár Piotr,Tu Zhuowen,Perona Pietro,et al.Integral channel features[C]∥Proceedings of 2009 British Machine Vision Conference,BMVC 2009,London,UK,2009.
[5] 李文杰,廖晓纬,束仁义,等.基于ZigBee和模糊C均值聚类方法在火警中的应用[J].传感器与微系统,2012,31(10):143-145.
[6] Fleyeh H,Biswas R,Davami E.Traffic sign detection based on AdaBoost color segmentation and SVM classification[C]∥Eurocon,IEEE,2013:2005-2010.
[7] Pizer S M,Amburn E P,et al.Adaptive histogram equalization and its variations [J].Computer Vision Graphics & Image Processing,1987,39(3):355 -368.
[8] 王程冬,程筱胜,崔海华,等.SIFT算法在点云配准中的应用[J].传感器与微系统,2012,31(2):149-152.
[9] Moranduzzo T,Melgani F.A SIFT-SVM method for detecting cars in UAV images[C]∥Geoscience and Remote Sensing Symposium,IEEE,2012:6868 -6871.
Traffic signs detection based on ICF and multi-class classifier*
ZHENG Tian-yu, WANG Nian, TANG Jun
(School of Electronics & Information Engineering,Anhui University,Hefei 230601,China)
Aiming at problem of low recall rate and high error rate of traditional traffic sign detection algorithm based on integral channel feature(ICF) and Adaboost,propose a two-stage traffic sign detection method.In the first stage,using spectral clustered integral channel features obtained by spectral clustering are combined with Adaboost to learn the overall detection model,which is applied to the input image to obtain region of interest(ROI).In the second stage,histogram equalization is imposed on ROI,and then a shape classifier using support vector machine(SVM) is employed to filter candidate object regions obtained in the former stage to remove the false positives.Experimental results show that the proposed SICF-Adaboost +SIFT-SVM detection algorithm method built upon a cascade classifier framework possesses higher detection rate compared with the traditional ICF Adaboost detect algorithm in dealing with high light intensity,motion blur,fog,and noisy similar object,which is suitable for traffic sign detection in real-world scenes.
traffic sign detection; shape classifier; spectral clustering ; integral channel feature(ICF); region of interest(ROI)
2017—01—19
国家自然科学基金资助项目(61172127); 安徽省自然科学基金资助项目(1508085MF120)
10.13873/J.1000—9787(2017)06—0134—04
TP 391
A
1000—9787(2017)06—0134—04
郑天宇(1992-),男,硕士研究生,研究方向为机器学习与模式识别,E—mail:780876068@qq.com。
王 年(1966-),男,教授,博士生导师,主要从事数字信号处理工作。
猜你喜欢
东方少年·布老虎画刊(2023年12期)2024-01-01 08:51:05
中学生天地(A版)(2022年11期)2022-11-25 07:43:16
汽车实用技术(2022年9期)2022-05-20 06:04:02
新世纪智能(英语备考)(2018年11期)2018-12-29 10:56:52
电子测试(2018年1期)2018-04-18 11:52:35
小学生学习指导(低年级)(2016年10期)2016-12-01 06:10:42
光学精密工程(2016年4期)2016-11-07 09:05:00
光学精密工程(2016年3期)2016-11-07 09:03:33
小天使·一年级语数英综合(2016年8期)2016-05-14 19:43:16
小天使·一年级语数英综合(2014年7期)2014-06-26 14:37:53
