
ADS-B信息的球状模型飞行冲突探测算法*
2017-06-09 08:53:29杨霄鹏田士佳苏子萱
传感器与微系统 2017年6期
刘 鑫, 杨霄鹏, 田士佳, 苏子萱
(空军工程大学 信息与导航学院,陕西 西安 710077)
ADS-B信息的球状模型飞行冲突探测算法*
刘 鑫, 杨霄鹏, 田士佳, 苏子萱
(空军工程大学 信息与导航学院,陕西 西安 710077)
随着空中飞行流量日趋增大,飞行器自由飞行过程中发生碰撞的可能性也越来越大,针对飞行器周围空域进行合理划分,给出了一种基于ADS-B信息的球状模型飞行冲突探测算法。该算法结合ADS-B的原理和特点,运用球状模型取代圆柱体模型对飞行器周围空域进行建模,然后进行冲突目标初选,对可能发生冲突飞行器的位置、航迹交叉点、距离进行计算并预估到达时间,与门限值比较判断能否发生碰撞,最后,对算法进行仿真。结果验证:算法能够更准确并且快速地完成冲突探测,并对驾驶员发出冲突告警,对防止飞行冲突的发生具有积极作用。
自由飞行; ADS-B; 冲突探测; 冲突告警
0 引 言
随着国内外民航运输业的飞速发展,飞行流量也随之不断增长,致使整个空域系统的拥挤和超负荷情况日益严重,飞行器之间由于高度、速度以及航迹和航向导致发生冲突的概率大大增加。现阶段广泛使用的交通警戒与防撞系统(traffic alert and collision avoidance system,TCAS)渐渐无法满足飞行器的防冲突告警需求,其在实际应用过程中暴露出错误告警和非必要性告警等问题,而且冲突探测和告警能力随着航空线路复杂性的增大而不断降低[1,2],干扰飞行员实际操作和专注度的同时,还会产生过大的飞行间隔,导致空域系统的管理混乱。
在此背景下,基于卫星导航的广播式自动相关监视(automatic dependent surveillance-broadcast,ADS-B)因其精度更高的方位信息和更新速度更快的数据特点能更有效、更即时、更准确地进行冲突探测,目前,多数冲突探测算法以圆柱体为模型,存在计算量大、虚警和漏警概率高、区域划分不准确等问题[3]。因此,采用球状模型,且在假定所有探测冲突的飞机都携带有ADS-B系统的情况下,根据冲突探测飞机相对位置、速度和飞行状态,给出了一种基于ADS-B信息的确定型飞机探测冲突算法,为飞行员提供更加充足和稳定的应急告警时间,提高空域系统的利用效率。
1 ADS-B概述
ADS-B是一种基于卫星定位并且利用空—地、空—空数据链通信完成交通监视和信息传递的空管监视新技术[4~9]。ADS-B系统机载装置通过GPS进行实时定位后,以2次/s的速率将飞机的飞行位置信息、速度、航向、高度等数据信息向外广播,其周围的飞机和地面基站都能够接收到这些实时数据。同时,本机也能收到其他飞机发出的相关数据。这样,飞机与基站、飞机与飞机之间通过高速数据链进行空地一体化的协同监视,实现“自由飞行”。
ADS-B运用了相关合作式的监视技术,具有更强的监视能力、精度误差更小、数据更新率快,系统功能更全面等优势,其良好的通信功能和监视手段能准确、及时、连续地掌握飞机动态,有效实施管制,提高了空域资源的利用率[10,11]。
2 飞行器周围区域划分
对飞行器周围监视区域划分的基础条件为,飞行器在空域中自由飞行,同时为了防止飞行器之间相互碰撞[12],综合考虑飞行器的安全和冲突探测算法可行性,可将每一架飞行器周围的区域划分为保护区域(PAZ)和碰撞区域(CAZ),其中PAZ和CAZ均以飞行器质心作为球心的虚拟球体,如图1所示,较大球体和较小球体分别为PAZ和CAZ。本文将装备有ADS-B系统进行冲突探测的飞行器称为本机,同时将在本机周围一定区域内自由飞行的飞行器称为目标机。文中将飞行器之间的即将发生的飞行冲突称为飞行矛盾[13],即航空器在自由飞行过程中飞行间隔小于预设的门限间隔。
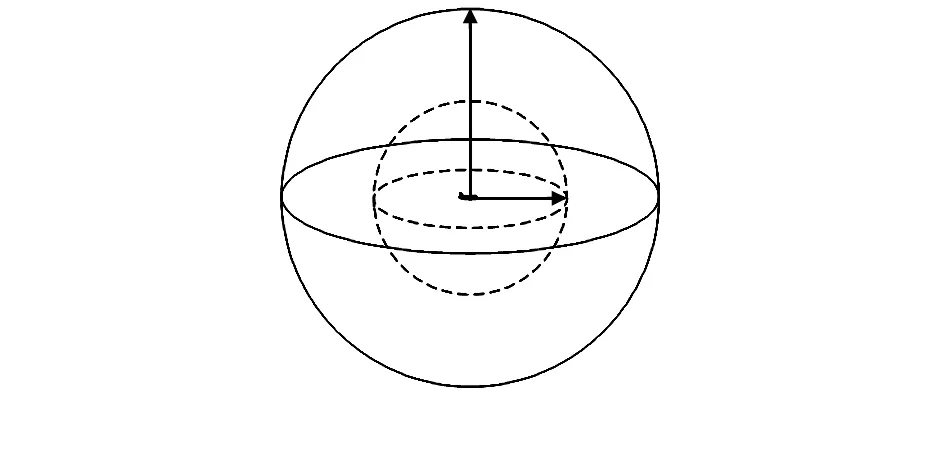
图1 飞行器周围区域划分
PAZ的设置范围大于CAZ,是为了在冲突探测过程中提醒飞行器驾驶员在其周围有飞行器存在进入其CAZ的可能性,给驾驶员提供足够的时间进行冲突预判并且及时采取规避措施。PAZ的范围是根据本机和目标机的速度、高度、航迹和航向等信息,在CAZ范围的基础上设定的,即
RPAZ(t)=RCAZ+max(0,V(t))T
(1)
式中RPAZ和RCAZ分别为t时刻本机PAZ区域球体和CAZ区域球体的半径;V(t)为t时刻本机与目标机的相对速度;T为本机PAZ区域的预留时间,取T=10 s。
设置CAZ是为了防止飞行器之间实际意义上碰撞的发生,如果目标飞机进入本机的CAZ,即可以认为两飞行器发生了飞行碰撞。综合考虑ADS-B所提供信息的精确度以及GNSS系统的准确性等因素的影响,对于ADS-B安全性能评价结果表明,可选取RCAZ=9.26 km。
3 飞行冲突探测算法
3.1 算法流程
针对飞行器在实际自由飞行过程中暴露出的问题,结合ADS-B系统的特点,采用确定型冲突探测算法。在探测模型建立过程中使用球状模型取代原有圆柱体模型,只需在两飞行器航迹交叉点相对位置连线上进行飞行探测,而不需要在水平和垂直两个方向上进行冲突探测,大大减少了系统的运算量,既提高了数据处理的速度,又提高了整个系统的精确度和可靠性,算法流程框图如图2所示。
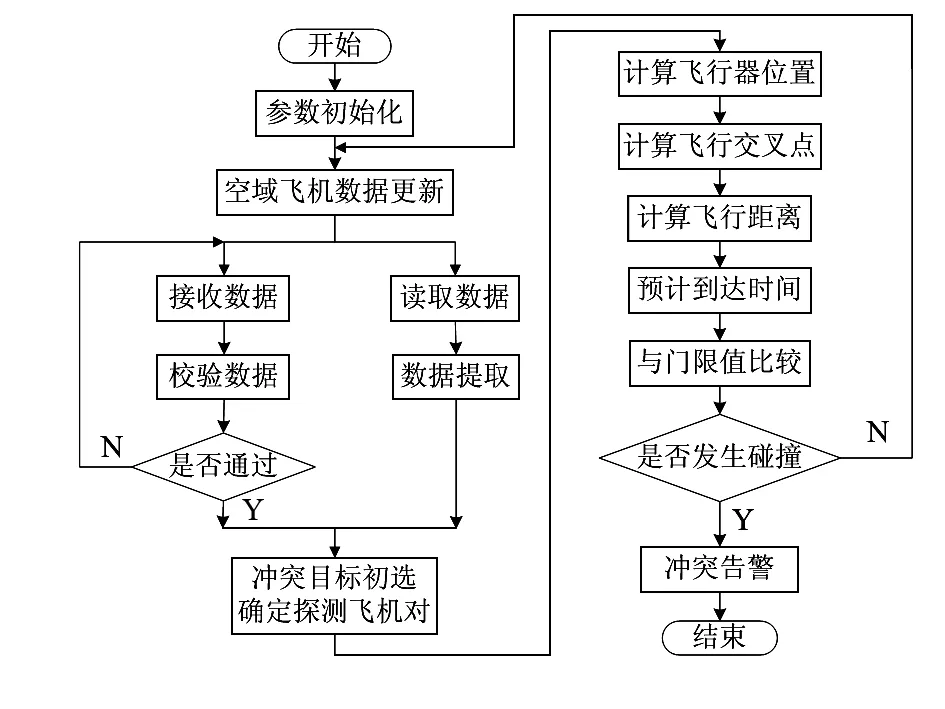
图2 飞行冲突探测流程图
3.2 冲突探测算法
本文提出的冲突探测算法在球状模型的基础上,通过计算目标机与本机航迹交叉点,根据当前位置计算得到飞行距离,预计到达交叉点的时间并与规定门限值比较,判断能否发生碰撞,进而发出冲突告警。
1)冲突目标初选
首先,进行冲突目标初选,对本机周围一定空域内的飞行器进行筛选,将不可能发生碰撞的飞行器排除,在目标初选过程中对可能发生冲突的飞行器进行飞行状态判断[14]。处于巡航状态的两飞行器可能出现的冲突场景主要可分为交叉、追及和相向3种类型,如图3所示。
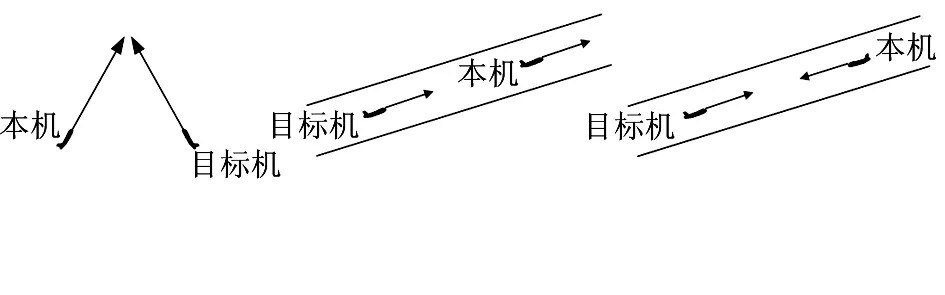
图3 冲突场景
假设本机和目标机在平面直角坐标系的坐标分别为(x1,y1)和(x2,y2),并且在水平和竖直方向的速度可分别表示为Vx1,Vx2,Vy1,Vy2,则判断目标机与本机是接近飞行还是远离飞行的依据为
c=(x1-x2)(Vx1-Vx2)+(y1-y2)(Vy1-Vy2)
(2)
当c<0时,表示目标机和本机接近飞行;当c=0时,表示目标机和本机相对静止飞行;当c>0时,表示目标机和本机远离飞行。
确定两飞行器的相对飞行状态后,判断目标飞机是否将进入本机的PAZ区域。将飞行器周围球状模型区域投影到平面直角坐标系,则本机的PAZ区域即XY平面上以RPAZ为半径圆形区域,可以认为当目标飞机的航迹线与该圆形区域存在交点时有发生碰撞的可能。以本机为原点建立坐标系,两飞行器的相对速度关系和相对运动关系如图4所示。
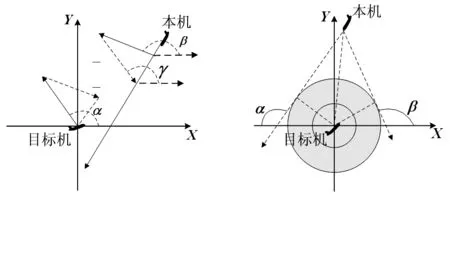
图4 相对飞行关系
其中,V1,V2分别为本机和目标机的速度矢量;α,β分别为其与X轴正方向的夹角;Vr为本机和目标机的相对速度矢量,其与X轴正方向的夹角用r表示,则存在以下关系
Vr=(V1cosα-V2cosβ,V1sinα-V2sinβ)
(3)
(4)
根据几何学内容可知:当目标机航迹相切于本机PAZ的左侧时,其切线与X轴正方向的夹角为α,Vr与X轴正方向的夹角为γ。如果γ小于α,则不会发生碰撞;同理,当目标机航迹相切于本机PAZ的右侧时,其切线与X轴正方向的夹角为β,如果γ大于β,则不会发生碰撞。
2)飞行交叉点计算
假设本机和目标飞机航迹在球坐标系中两点坐标分别为P11(X11,Y11),P12(X12,Y12)和P21(X21,Y21),P22(X22,Y22),航迹交叉点坐标用P(X,Y)表示,用球坐标表示为θ11,φ11,θ12,φ12,θ21,φ21,θ22,φ22和θ,φ。如图5所示。
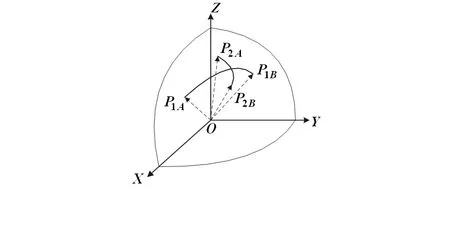
图5 球坐标示意图
用R表示地球半径,则坐标原点O到P11,P12,P21,P22的矢量分别为
r11=Rsinθ11cosφ11i+Rsinθ11sinφ11j+Rcosθ11k
(5)
r12=Rsinθ12cosφ12i+Rsinθ12sinφ12j+Rcosθ12k
(6)
r21=Rsinθ21cosφ21i+Rsinθ21sinφ21j+Rcosθ21k
(7)
r22=Rsinθ22cosφ22i+Rsinθ22sinφ22j+Rcosθ22k
(8)
r=Rsinθcosφi+Rsinθsinφj+Rcosθk
(9)
根据矢量关系可得
A1Dsinθcosφ-B1sinθsinφ+C1cosθ=0
(10)
A2sinθcosφ-B2sinθsinφ+C2cosθ=0
(11)
Ai=sinθi1sinφi1cosθi2-sinθi2sinφi2cosθi1
(12)
Bi=sinθi1sinφi1cosθi2-sinθi2sinφi2cosθi1
(13)
Ci=sinθi1cosφi1sinθi2cosφi2-sinθi2cosφi2sinθi1cosφi1
(14)
式中i均取1或2,则通过以上式计算可得θ,φ,进而可以得到航迹交叉点坐标P(X,Y)。
3)飞行距离计算
假设当前位置坐标为N(Xn,Yn),则其到航迹交叉点P(X,Y)的距离为
(15)
4)到达时间计算
假设目标飞机与本机预计到达航迹交叉点的时间为td,综合考虑飞行过程中各种因素的影响,建立飞行航迹模型
Dt=Dt-1+VΔt+vt-1+nt
(16)
式中Dt为不同飞行器t时刻所在的航迹位置;V为当前飞行速度;vt和nt分别为飞行速度测量误差和飞行过程中引入的噪声。
在已知两飞行器位置和距离时,以td代替Δt带入上式便可得到两飞行器到达交叉点的时间,进而与门限值比较判断能否发生碰撞,若可能发生碰撞,则发出冲突告警。
4 仿真分析
为了检验算法的实际可行性,根据机场附近典型的飞机ADS-B报文信息,利用Matlab对冲突探测算法进行实验测试,进行了大量的蒙特卡罗仿真分析。假设本机周围CAZ半径为 ,在9.26~55.56 km范围的圆环内存在50架自由飞行状态的飞机,其模拟数据的初始交通态势如图6所示。
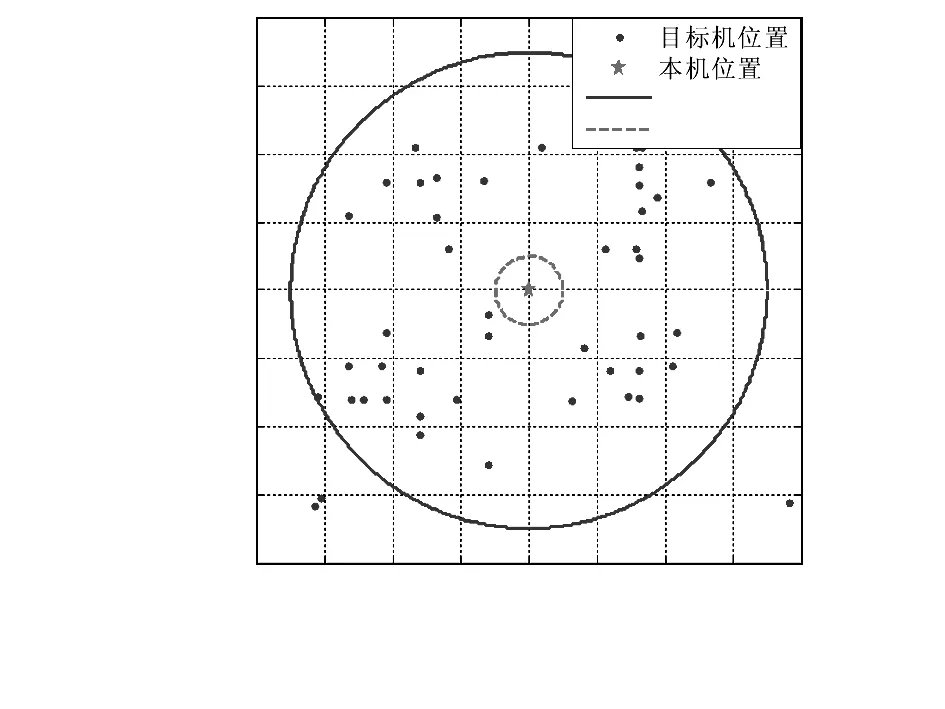
图6 初始交通态势
经过对空域飞机数据的更新和处理,对冲突目标初选去除远离本机飞行的飞机和不可能进入本机CAZ的飞机后,可能发生冲突的飞机为9架,此时的交通态势如图7所示。对该50架飞机相关数据做大量的蒙特卡罗实验,结果显示:存在冲突可能的飞机平均数量为7.156 8架,多数飞机经过筛选和排除之后,只有极少数飞机存在发生冲突的可能,说明该冲突探测算法在冲突目标选择方面性能优越,对飞行安全具有积极作用。

图7 排除后的初始交通态势
为了更准确地实现冲突预警,进一步对可能发成冲突的飞机进行探测,本机和目标机分别以v1=700km/h和v2=1 000km/h的速度飞行,初始位置坐标分别为(0.000 0,0.000 0)m和(1.259 8,-3.259 8)m,假设其航迹如图8所示。
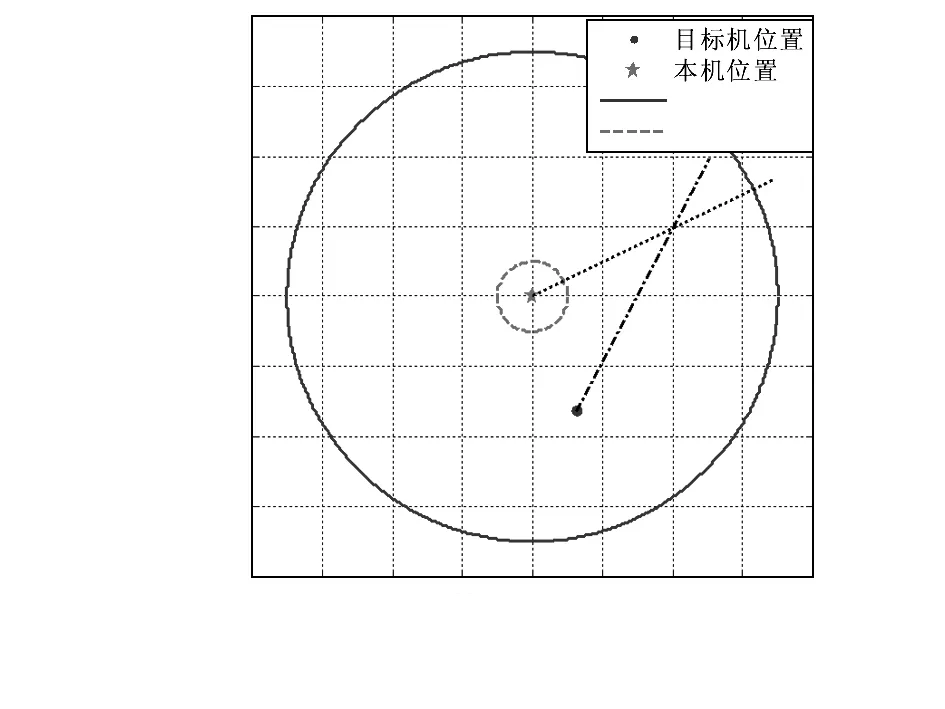
图8 航迹图
两机航迹交叉点坐标为(4.000 0,2.000 0)m,计算可得本机比目标机先到达航迹交叉点,则冲突探测过程主要预测本机到达交叉点时刻的态势。经过计算,两机的相对速度为vr=306.76m/s,本机PAZ半径为RPAZ=11 114.32m,则目标机到达本机CAZ和PAZ的时间分别为tc=61.521 9s和tp=50.963 7s,故tc>1min且tp<2min。由此可见,本机会发生PAZ预警,可为驾驶员提供充足的预判和反应时间。
5 结束语
针对基于ABS-B系统的优势和特点,采用球状模型对飞行器周围区域进行合理划分,通过仿真实验和分析证明算法具有计算速度快、数据准确性高、流程合理等优势,具有较强的可行性。同时,在不同环境空域中影响因素不同的情况下,应该对相应的参数和计算方法进行合理的改变,可以有效地对冲突目标对之间进行探测并发出冲突告警,为扩大冲突探测区域、提高探测准确度和增强防撞性能开辟了广阔的前景。但是,在实际应用过程中,可能发生冲突飞机的数量更多,并且空域中存在多种因素影响,所以,对于复杂情况下的冲突探测仍需进一步探讨和研究。
[1]MaximeGariel,FabriceKunzi,JohnHansmanR.AnalgorithmforconflictdetectionindensetrafficusingADS-Bs[C]∥30thDigtalAvionicsSystemConference,2011.
[2] 张 军.现代空中交通管理[M].北京:北京航空航天大学出版社,2005.
[3] 浦黄忠,胡 勇,王道波.无人机高精度容错高度测量系统设计[J].传感器与微系统,2007,26(8):84-86.
[4] 沈佳峰.民机TCAS机动策略与仿真研究[D].上海:上海交通大学,2011.
[5]WhalenD,RathinamS,BaggeC.Advanceddevelopmentsinairportsurfaceandterminalareatrafficsurveillanceapplications[C]∥Proceedingsofthe22ndDigitalAvionicsSystemsConference,2003:9.B.3-9.1-9.
[6] 邓 伟,张 军,吴 限.一种适应于航路改变情况的冲突概率预测算法[J].北京航空航天大学学报,2005,31(12):1327-1331.
[7] 曹平军,杨昌茂,王晓峰,等.飞行体姿态测量误差校正方法研究[J].自动化仪表,2014(2):20-23.
[8]TangJun,FanLinjun,LaoSongyang.Collisionavoidanceformulti-UAVbasedongeometricoptimizationmodelin3Dairspace[J].ArabianJournalforScienceandEngineering,2014,39(11):8409-8416.
[9]CarboneC,CiniglioU,CorraaroF,etal.Anovel3Dgeometricalgorithmforaircraftautonomouscollisionavoidance[C]∥2006 45thIEEEConferenceonDecisionandControl,IEEE,2006:1580-1585.
[10] 胡永红.小型无人机高度定位数据融合方法[J].传感器与微系统,2003,22(6):24-26.
[11]HoltJ,BiazS,AjiCA.Comparisonofunmannedaerialsystemcollisionavoidancealgorithmsinasimulationenvironment[J].JournalofGuidance,Control,andDynamics,2013,36(3):881-883.
[12] 刘慧颖,白存儒,杨广珺.无人机自主防撞关键技术与应用分析[J].航空工程进展,2014,5(2):141-147.
[13] Park J W,Oh H D.Tahk M J.UAV collision avoidance based on geometric approach[C]∥SICE Annual Confererce,IEEE,2008:2122-2126.
[14] 罗 臻,刘宏立,徐 琨.无线传感器在协同攻击环境中的安全定位研究[J].传感器与微系统,2014,33(7):38-41.
Flight collision detection algorithm based on ADS-B information spherical model*
LIU Xin, YANG Xiao-peng, TIAN Shi-jia, SU Zi-xuan
(Information and Navigation College,Air Force Engineering University,Xi’an 710077,China)
With the increasing flight flow of aircraft,the probability of collision during free flying is becoming larger.A collision detection algorithm based on ADS-B spherical model is put forward via reasonably divide surrounding area of aircraft.Combine with the theory and feature of ADS-B,this method establishes spherical model instead of cylindrical model,then implement the pre-selecting of collision objects,calculate the possible collision position,track-crossing point and distance.It estimates the arriving time and compare with threshold value to detect whether a collision can happen.Simulation result shows this algorithm can realize collision detection more quickly and accurately,which can be advantageous to avoid flight collision by sending collision alert to the pilot.
free flying; ADS-B; collision detection; collision alert
2016—07—14
国家自然科学基金资助项目(61202490);航空科学基金资助项目(20150896010)
10.13873/J.1000—9787(2017)06—0126—04
V 249
A
1000—9787(2017)06—0126—04
刘 鑫(1993-),男,硕士研究生,主要研究方向为军事航空通信,E—mail:kdyliuxin@163.com。
杨霄鹏(1973-),男,副教授,硕士生导师,主要从事宽带无线通信及信号处理技术工作。
猜你喜欢
军民两用技术与产品(2021年10期)2021-03-16 06:05:22
小学生学习指导(中年级)(2019年3期)2019-04-10 01:58:06
西南交通大学学报(2016年4期)2016-06-15 20:29:36
海峡科技与产业(2016年3期)2016-05-17 04:32:11
中国农业文摘-农业工程(2016年5期)2016-04-12 05:38:14
中学生物学(2016年8期)2016-01-18 09:08:18
中华建设科技(2014年6期)2014-08-27 04:16:40
大连理工大学学报(2013年2期)2013-09-27 12:33:22
计算机与网络(2013年23期)2013-04-16 23:13:30
电脑迷(2012年9期)2012-04-29 02:08:25
